基于双幂次趋近律的终端滑模舵机控制器设计
2022-04-28杨竞楠郭明坤夏广庆
杨竞楠,杨 峰,孟 琪,郭明坤,夏广庆
(1.大连理工大学航空航天学院工业装备结构分析国家重点实验室,辽宁大连 116024;2.大连理工大学航空航天学院辽宁省空天飞行器前沿技术重点实验室,辽宁大连 116024;3.大连理工大学信息与通信工程学院,辽宁大连 116024)
0 引言
电动舵机的性能直接影响了相关飞行器的控制精度和动态品质。传统的舵机控制方法主要有PID 控制、模糊PID 控制、神经网络控制等,上述舵机控制方法虽然初步满足了舵机控制的使用需求,但其收敛时间相对较长,对不确定扰动的抑制能力相对较弱。为了适应现代战争对飞行器更高控制品质的迫切需求,亟须进行快响应、强鲁棒性舵机控制技术的研究。
樊泽明等和吴春等将鲁棒控制方法应用于电动舵机控制,有效提高了电动舵机的鲁棒性,但是结构复杂,保守性强。赵峰等在电动舵机控制中采用滑模变结构控制,苏伟杰等将变指数趋近律滑模控制器与PID 控制器相结合设计组合控制器,2 种方法提高了电动舵机的抗干扰能力和鲁棒性,但依靠线性滑模控制方法难以实现舵机系统的快速稳定。近年来,有限时间稳定理论日趋完善,相关方法具有收敛速度快、抗干扰能力强、鲁棒性好等特点。终端滑模控制(TSMC)采用非线性滑模面代替传统的线性滑模面,能保证系统状态在有限时间内稳定。特别地,非奇异终端滑模(NSTSM)控制方法克服了奇异现象,且结构相对简单,便于工程应用。本文将以NSTSM 方法为基础,结合双幂次趋近律(DPRL)进行舵机系统鲁棒控制器的设计分析,其中DPRL 方法能够保证系统状态在固定时间内到达滑模面,从而更高效地利用NSTSM 方法的强鲁棒性和有限时间收敛特性。
1 数学模型
电动舵机系统主要由舵机控制器、伺服电机、功率放大器、减速机构和位置传感器构成,如图1 所示。在不考虑电枢电感的情况下,可以用机电转换方程、反电动势方程、转子电路电压方程和机械方程来表示电动舵机的数学模型:
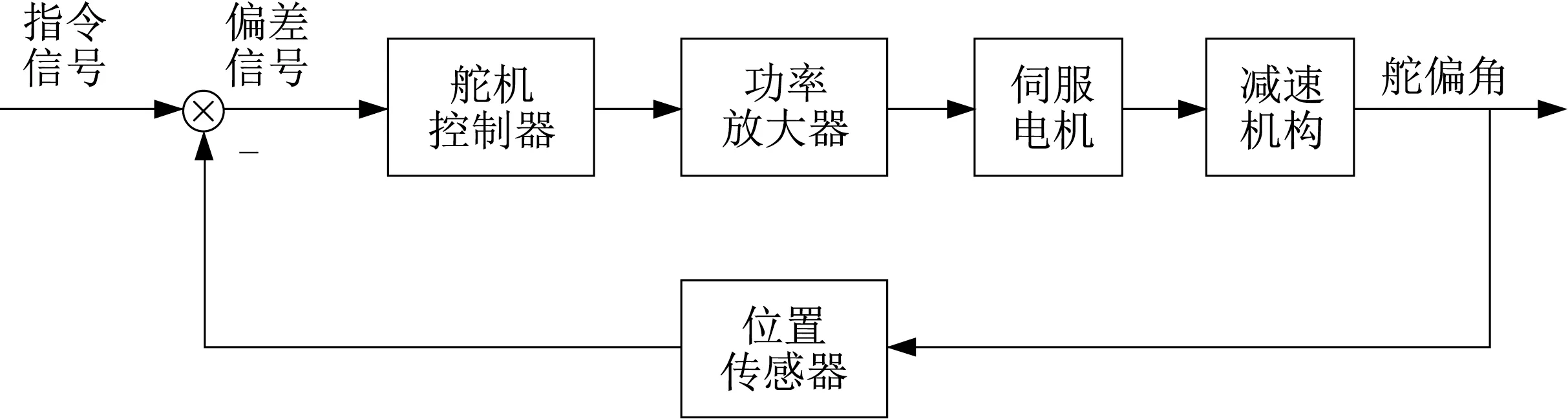
图1 舵机系统结构Fig.1 Steering gear system structure

式中:为电机输出扭矩;为铰链力矩;为摩擦力矩;为惯性力矩;为转矩常数;为电枢电流;为电机反电动势;为感应电动势系数;为电枢电压;为电枢回路总电阻;为电枢回路总电感。
惯性力矩具体形式为

式中:为舵机系统实际输出的舵偏角;为电机等效负载转动惯量。
将式(2)代入式(1),得舵机系统的动力学模型:



舵机鲁棒控制器的设计目标为:在不确定扰动影响下,系统的跟踪误差()、()能够在有限时间内收敛到零,即存在有限时刻≪+∞,当→时,有下式成立:

2 基于终端滑模的控制器设计
2.1 基于非奇异终端滑模控制的控制律
式(4)所示系统是典型的含有不确定扰动的二阶系统,为了实现该系统的快速稳定控制,本文将结合NSTSM 和DPRL 进行控制器设计。首先,滑模变量设计如下:

式中:>0 为设计常数;1 <<2。
对上式求导可得

结合滑模动力学方程式(7),系统(4)的控制器设计如下:

式中:>0;>0;>1;0 <<1。

式中:()为等效控制项;()为趋近控制项;()为不连续控制项。

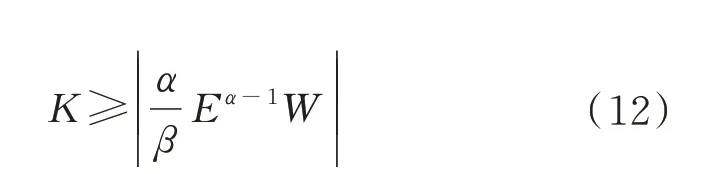
式中:为系统状态变量()的上界值;为系统集总扰动项()的上界值。
2.2 李雅普诺夫稳定性证明
为了便于稳定性分析,给出如下定义。
考虑如下动态控制系统:

式中:()∈R;()∈R。
从任意初始状态∈R出发,如果存在一个时刻,使得系统满足:当≥时,()=0,那么这样的系统叫做一致有限时间收敛到原点。如果系统的原点为一致有限时间稳定,且收敛时间有界,即存在>0,使得≤,∀∈R,则称系统为固定时间收敛到原点。
对于系统(4)和NSTSM 滑模面(6),式(8)中的控制器将使得滑模变量在固定时间内收敛到滑模面上,同时实现被控系统(4)在有限时间内稳定。
证明:将分为两步进行,首先分析滑模面的固定时间可达性,其次证明在NSTSM 滑模面上,系统状态在有限时间内到达平衡点。
选取李雅普诺夫函数如下:

对式(14)求导,并将式(7)代入,可得
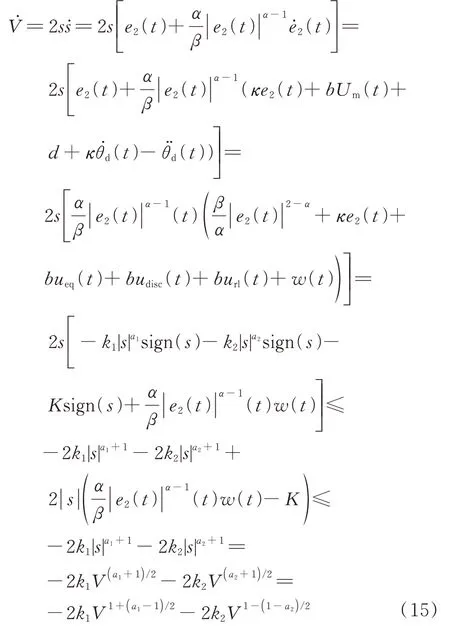
由文献[18]中的定理13 可知,滑模变量将在固定时间内收敛到零,即系统轨线将在固定时间内收敛到滑模面上,收敛时间满足

由第一步证明可知,存在>0,当≥时,=0 成立,此时

由引理1 可证明系统到达平衡点的时间有限。定义李雅普诺夫函数如下:

根据式(17)对求导,有

式中:=2>0;=(1/+1)/2 <1。
由文献[18]中的定理12 可知,以时刻为起始点,系统状态()将在有限时间内收敛到零,其中满足当≥时,()=0,且

3 仿真分析
本文通过Simulink 工具箱搭建了电动舵机控制系统仿真模型,对上述控制方法进行数值仿真。电动舵机系统参数为:=0.021 5 V·s/rad,=0.021 4 N·m/A,=31.35 g·cm,=0.74 Ω,外部干 扰=0.1sin(π)+0.15sin(10)+0.05,仿真步长=0.001 s,仿真时间=10 s。控制器参数为:=3 000,=1.667,=200,=200,=1.47,=0.50,对于不同的输入指令,的具体取值可根据仿真情况调整。为了减缓抖振现象,在滑模控制中往往采用双曲函数替换不连续控制项中的符号函数,双曲函数的形式如下:

式中:选取=0.1。
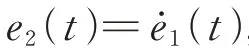
为验证所设计控制律的有效性,将NSTSM 控制律与传统PID 控制进行了对比。以方波信号和变频率正弦信号作为舵机输入指令对控制器进行仿真,仿真波形如图2~图5 所示。其中,方波信号的幅值为0.1 rad,周期为2 s,占空比为50%;变正弦信号的幅值为0.1 rad,初始频率为1 Hz,终点频率为5 Hz。
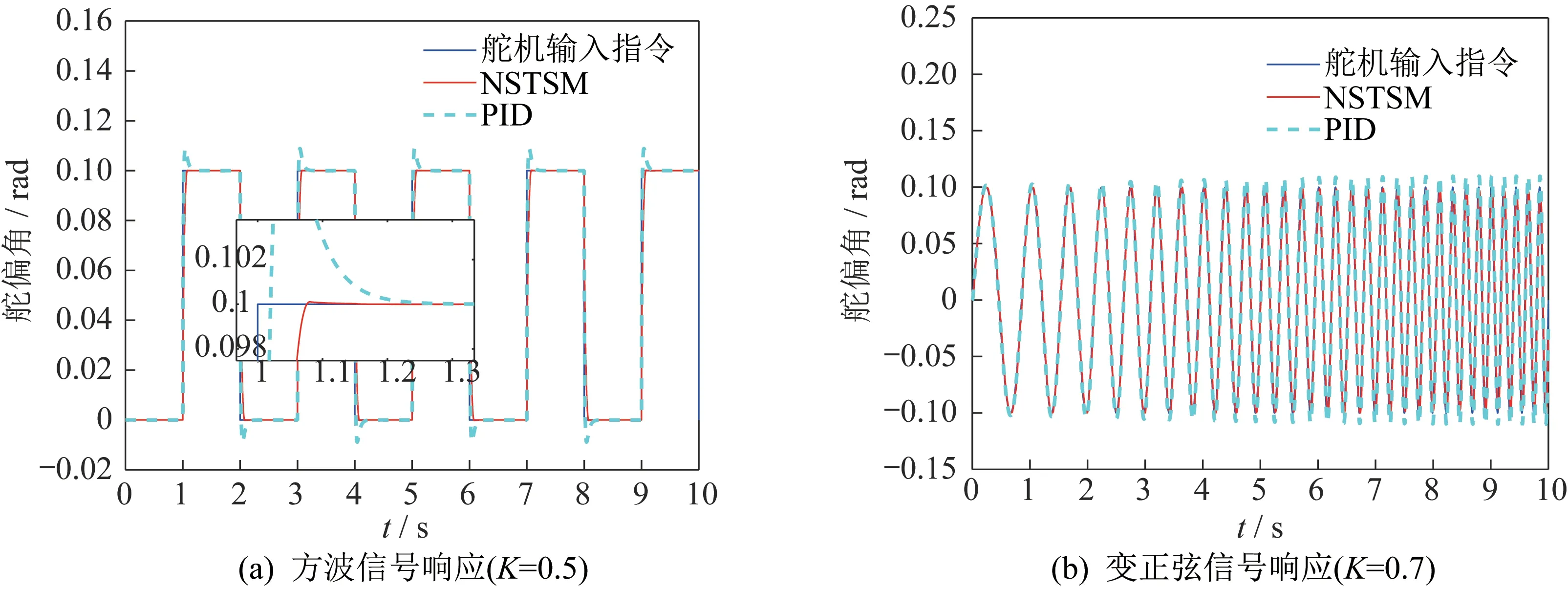
图2 舵机响应Fig.2 Steering gear response
方波信号与变正弦信号下电动舵机的响应曲线如图2 所示。由图2(a)可知,当输入指令为方波信号时,采用NSTSM 控制器的舵机系统的收敛时间为0.1 s 左右,并且与采用PID 控制器的舵机系统相比无超调。此外,由于采用了双曲函数,系统的抖振得到了很好的抑制,位置跟踪稳态基本无抖振。由图2(b)可知,当输入指令为变正弦信号时,采用NSTSM 控制器的舵机系统响应曲线几乎与输入指令重合,而采用PID 控制器的舵机系统虽然一开始也能准确跟踪输入指令,但随着正弦信号频率的加快跟踪误差越来越大。因此,无论是方波信号还是变正弦信号,NSTSM 都能快速准确地跟上输入指令,实现预期控制目标,系统具有良好的快速性、鲁棒性和稳态响应精度。
2 种信号下舵机系统滑模变量的仿真波形如图3 所示。对于方波信号,在信号发生阶跃变化时滑模变量具有较大变化但很快收敛至零,收敛时间为0.01 s,验证了DPRL 的固定时间可达性。此外,由于运用双曲函数取代符号函数,滑模变量的抖振现象得到了很好的抑制;对于变正弦信号,由于输入指令每时每刻都在变化,因此滑模变量也在不断变化。随着正弦信号频率的增加,滑模变量的变化频率也越来越快。
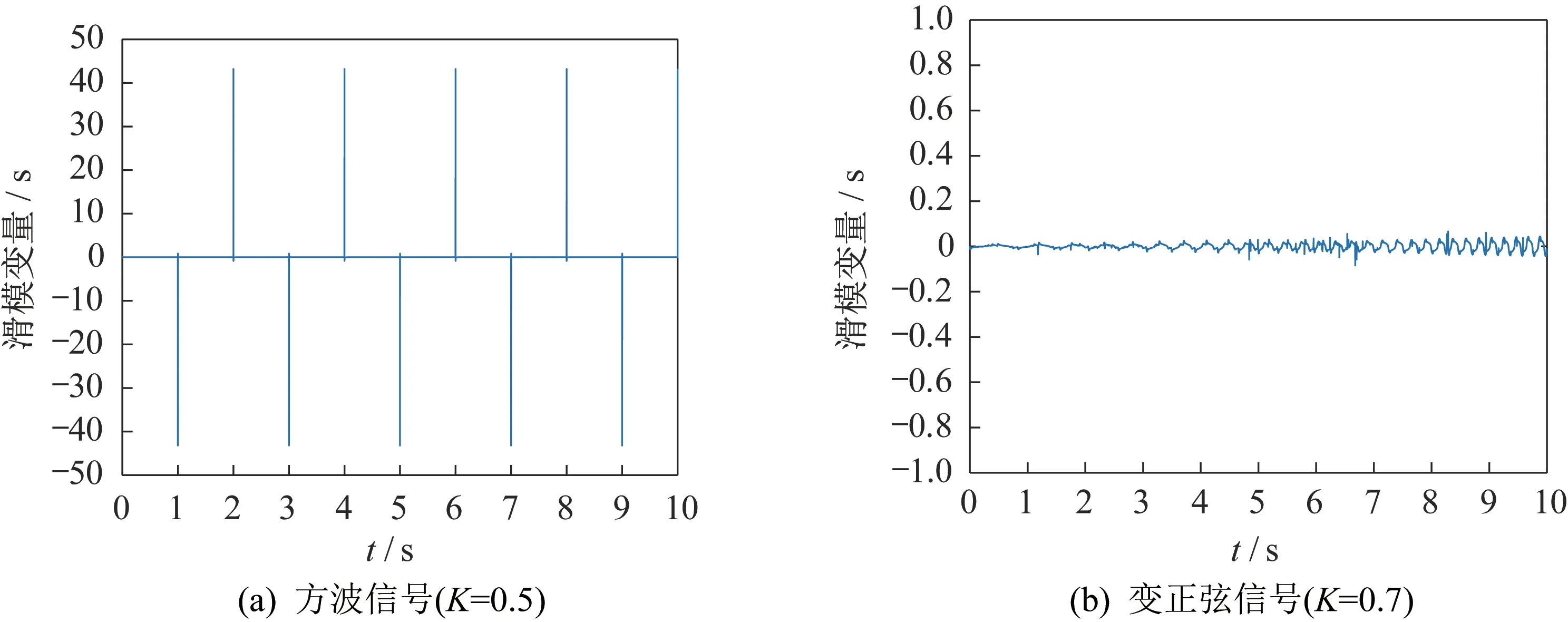
图3 滑模变量Fig.3 Sliding mode variable
2 种信号下电动舵机控制电压和输出转矩的仿真波形如图4、图5 所示。从图中可以看出,对于方波信号,在信号发生阶跃变化时,两种舵机系统的控制电压和输出转矩都很快收敛至零。从局部放大图中可以看出,双曲函数对于抖振现象有很好的抑制作用;对于变正弦信号,随着正弦信号频率的增加,NSTSM 舵机系统的仿真曲线出现了“尖刺”现象,采用PID 控制器的舵机系统的仿真曲线呈变正弦状,幅值变化较小,其仿真曲线的频率和幅值随着信号频率的增加而逐渐增大。

图4 电机控制电压Fig.4 Motor control voltage
图5 电机输出转矩Fig.5 Output torque of the motor
4 结束语
本文结合非奇异终端滑模和固定时间收敛思想,设计了一种基于双幂次趋近律的全局非奇异终端滑模舵机控制器,该控制器克服了传统控制方法收敛速度慢的不足,大幅度提高了电动舵机的响应速度和鲁棒性,使系统具有一定的抗干扰能力,具有一定的工程应用价值。