组网卫星电推进自主轨道保持方法
2022-04-28张凯华王世耀陈文晖徐家国
杜 宁,张凯华,王世耀,陈文晖,徐家国
(1.上海航天控制技术研究所,上海 201109;2.上海航天技术研究院,上海 201109)
0 引言
电推进相比化学推进具有比冲高、对姿态干扰小等优点,随着电推进技术的逐渐成熟,在静止轨道卫星位置保持、小卫星轨道保持等领域的应用明显增加。本文以某对地观测星座任务为背景,基于组网卫星安装的电推力器进行自主轨道保持控制。
传统卫星轨道编队控制,侧重于严格回归轨道设计与保持、成员星相对位置和速度的精确控制等方面。TerraSAR-X 等卫星项目均提出了管道控制的概念,以实现观测卫星的严格回归。VTIPIL等研究4 阶重力势场下的回归轨道设计及其控制方法。张冲难等和杨盛庆等分别基于数值计算和迭代修正方法,进行了严格回归轨道设计方法研究。ORMSTON 等对EarthCARE 卫星的轨控策略进行分析,从轨道特性、有效载荷限制、地面操作实施等方面给出了半长轴和偏心率、倾角控制的最优方案。赵黎平等考虑地面站约束,设计了半长轴和偏心率协调控制的双脉冲方法,未考虑星上自主轨道控制参数来源。吴宅莲等设计了星上轨道高度自主保持方法,未考虑组网卫星相位控制和偏心率控制。刘付成等基于相对轨道根数描述,基于化学推力器设计了精密编队卫星轨道轨控控制方法。
本文研究星座组网卫星轨道保持,重点并非精密编队或严格回归轨道保持,而在于选取简单可靠的相对轨道控制策略。首次提出星地结合的标称星轨道递推和考虑能源约束的轨控姿态设计方法,并根据电推进特点,合理考虑能源、程控任务、轨道偏心率等约束,进行星上自主的轨道控制策略研究。
1 倾斜轨道星座轨道保持问题
以高度500 km 的倾斜轨道,每个轨道面内包含多个星簇的对地观测星座为例(如图1 所示),星簇内包含3 颗不同类型的卫星(如图2 所示),各卫星面质比不同,见表1,需保持相位差200 km 以内的“松散”构型。轨道控制需克服大气阻力引起的轨道衰减,并保持星簇内卫星相位差在需求范围内。
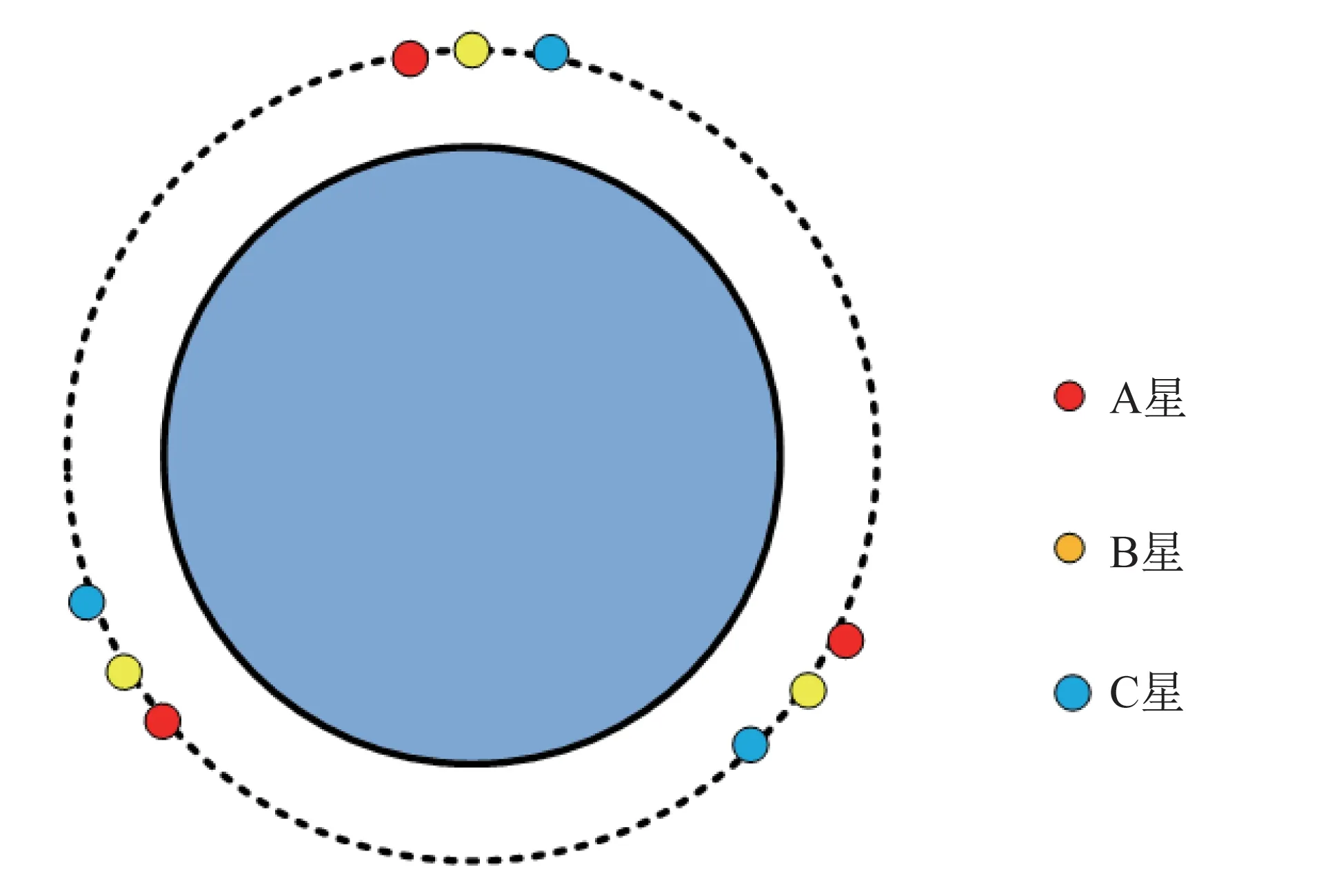
图1 面内星座构型Fig.1 Intra-planar constellation configuration

图2 星簇内构型Fig.2 Intra-cluster configuration
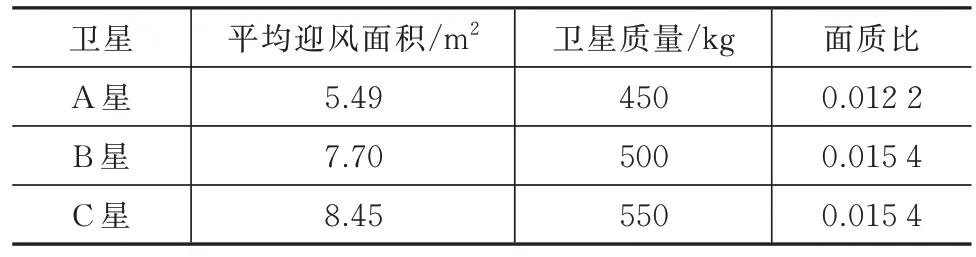
表1 三星迎风面、质量情况Tab.1 Windward areas and weights of the three satellites
倾斜轨道组网卫星轨道控制受到以下4 个方面约束:
1)由于卫星运行在倾斜轨道,且太阳电池阵固定安装,因此,卫星姿态长期运行在对日定向控制模式以保证能源,轨道控制期间通过姿态调整保证推力器轴线沿卫星飞行方向,难以保证太阳帆板受太阳光直照,需对单次轨道控制时长进行约束。
2)卫星配置电推力器作为轨道控制执行机构,推力幅值远小于化学推进剂,考虑能源约束,轨控完成后需及时返回三轴对日定向控制。因此,有必要提高轨控频率,以降低单次轨控时长。
3)轨道控制期间卫星姿态无法兼顾载荷观测任务,需避免轨道控制任务与程控任务冲突。
4)当轨道偏心率超出阈值时,优先在远地点附近进行轨道控制。
由于轨道控制和状态判读较为频繁,依赖地面难以实时根据约束生成轨道控制策略,因此,有必要开发星上自主轨道控制策略。
2 自主轨道保持策略
2.1 轨道控制方案
轨道自主保持控制,一种方案为基于星间通信获取目标星轨道参数,根据设计的相位差进行相对轨道控制;另一种方案为基于地面标称轨道模型,定期上注各卫星标称轨道,自主控制各卫星轨道与标称轨道一致。相对轨道控制受星间通信终端视场和距离限制,适合星簇内相位保持,不适用于星簇之间相位保持,因此,本文采用绝对轨道控制方案。
地面递推各卫星标称轨道参数时,为避免标称轨道进动速率与实际情况差别过大,引起轨道面调整过于频繁,导致浪费燃料,地面应采用完整的地球非球形摄动模型对标称轨道参数进行递推,并考虑除大气阻力之外的其他摄动。此外,由于各卫星轨道面进动速度与地面模型难以完全一致,在轨长时间运行后,升交点赤经和轨道倾角误差达到阈值。若组网卫星轨道有严格回归要求,则根据轨道倾角和升交点赤经偏差进行面外参数控制;若无严格回归要求,可修正地面标称星轨道模型轨道倾角和升交点赤经参数,以避免面外轨道参数控制引起燃料消耗。
由于轨道保持控制所需燃料本质上均由轨道衰减引起,为节省燃料消耗,尽量避免轨道降低控制,同时为简化星载算法,采用固定高度偏置方案进行相位保持控制。星载软件根据本星GPS 瞬时轨道参数进行轨道平根数计算;同时根据地面上注的标称星轨道平根数,递推至当前时刻;进而得到本星与其标称星的轨道幅角差值和轨道半长轴差值。当卫星与目标星轨道相位差达到阈值后,进行固定时长的轨道升高控制。完成轨道升高控制后,由于气动阻力引起轨道高度衰减,当前卫星轨道幅角相比其标称星轨道幅角,将按“超前—滞后—超前”规律运行,直到触发下一次轨道控制阈值。因此,各卫星完成相位保持即可间接完成轨道高度保持控制和偏心率控制。
单次轨道控制的时长由轨道高度偏置量决定。轨道高度偏置量设计值需考虑如下约束:首先根据卫星轨道高度和面质比,估算预期的轨道控制间隔内大气阻力引起的轨道衰减量,轨道高度偏置量的下限应大于该轨道高度衰减量;此外,相位差Δ与半长轴偏置量Δ存在线性关系,在相位差指标约束情况下,可根据数学仿真确定Δ的上限。以B星面质比为例,太阳活动高年轨道高度每天衰减约200 m,即轨道高度偏置量不应超过200 m;轨道幅角误差0.5°时对应轨道高度偏置量约800 m,因此,轨道高度偏置量不应超过800 m,如图3 所示。
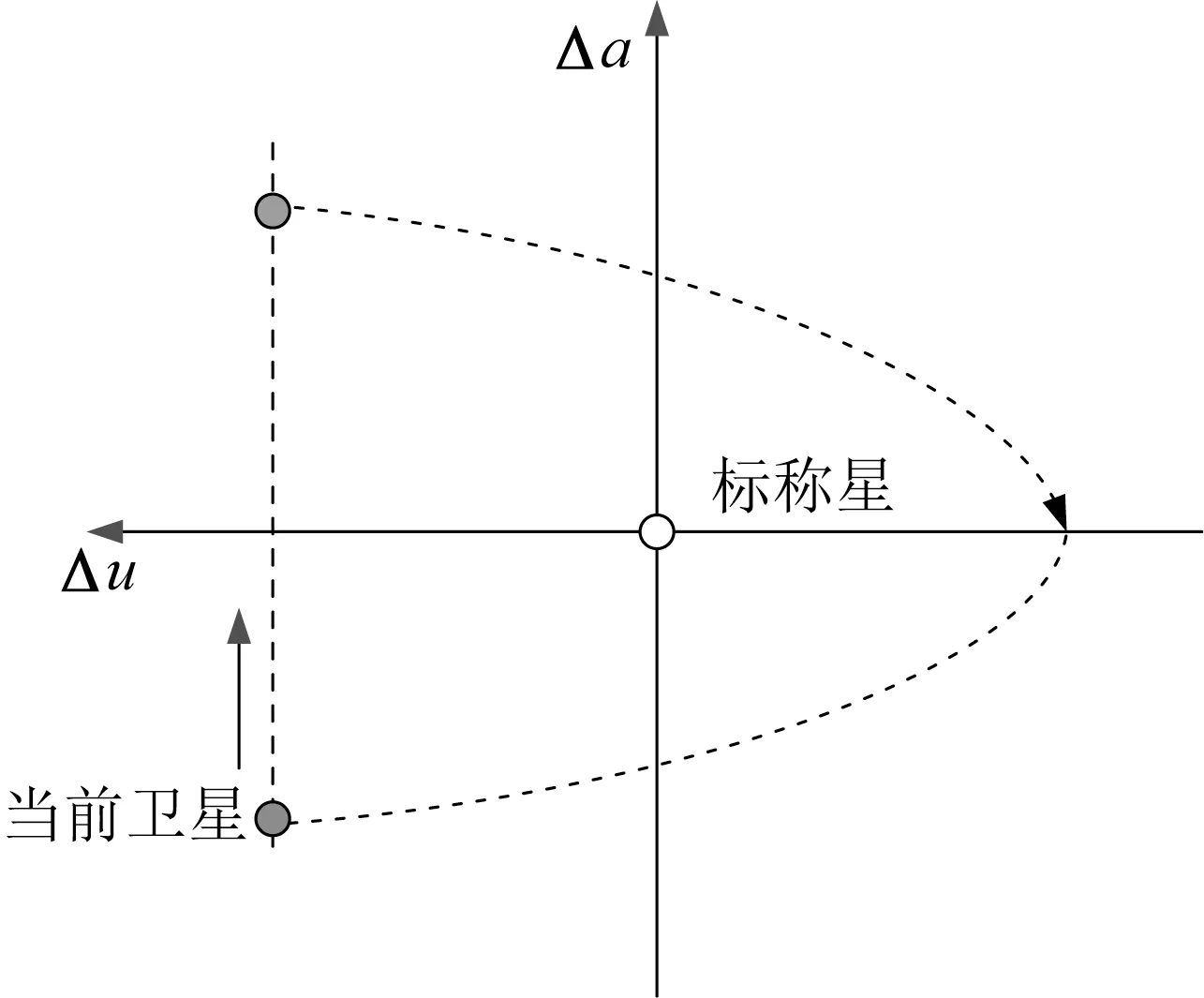
图3 单边极限环控制方案Fig.3 Single side limit cycle control scheme
2.2 具体实施方法
由于电推力器需过个轨控弧段才能完成一次轨道高度偏置控制,因此,定义一次完整的固定高度控制为一次轨控任务,每次轨控任务可包含多次轨控喷气。组网卫星自主轨道保持控制(如图4 所示)详细方案如下:

图4 轨道控制流程图Fig.4 Flow chart of the orbit control
1)在对日定向控制模式下,距离前次轨道控制时间大于阈值、GPS 给出定轨标志的情况下,姿轨控应用软件根据本星GPS 瞬时轨道参数进行轨道平根数计算;同时根据地面上注的标称星轨道平根数,递推至当前时刻;进而得到本星与其标称星的轨道幅角差值和轨道半长轴差值。
2)本星与其标称星轨道幅角差值达到阈值且轨道半长轴小于标称星时,距离前一次轨控完成超过阈值、轨道平近点角平根数接近180°,置启动轨道控制标志、清除前次轨道控制完成标志;根据固定的轨道高度偏置量计算轨控时间长度,累积轨道控制时长达目标值后,置轨道控制完成标志。其中相位差阈值和高度偏置量可注数调整。
3)单次轨道控制时机,同时满足如下条件:已置轨控启动标志;距离前一次轨控完成超过20 h;距离前一轨道周期内轨道控制结束已超过60 min;卫星处于三轴对日定向控制模式;能源满足要求;距离下一次程控姿态调整任务(载荷作业)超60 min;轨道平近点角平根数=π-Δ/2,其中Δ为单个轨道周期内轨道控制时长,为轨道角速度。
4)单次轨道控制退出条件,满足如下条件之一,返回三轴对日定向控制模式:收到地面上注的即时任务指令,转入载荷作业模式,记录累积本次累积轨控时间;单个轨道周期内轨控时长达目标值,返回三轴对日定向控制模式,并开始连续2 个轨道弧段轨控间隔计时;累积轨控时间达目标值,置轨控完成标志,清除启动轨控标志;平均轨道半长轴高于阈值,置轨控完成标志,清除启动轨控标志;收到能源预警信号。
2.3 轨控期间姿态控制方法
以电推力器轴向与卫星-轴方向平行、电池阵法线与卫星-轴平行为例,推力器理论推力方向与卫星+轴方向一致,轨道控制前需要根据轨控模式标志,调整卫星姿态以获得所需方向的推力。
根据轨道相位保持方案可知,卫星寿命期间主要进行轨道升高控制。原本轨道升高控制模式,只需卫星保持相对轨道坐标系零姿态即可,为优化轨道升高控制期间太阳电池阵充电效率,重新设计轨道升高控制模式期望姿态如下:
太阳高度角(beta 角)的绝对值大于10°时,通过矢量叉乘原理,约束卫星-轴(电池阵法线)位于卫星飞行方向和太阳矢量方向构成的平面内,以提高帆板电池阵贴片面的太阳光照角:
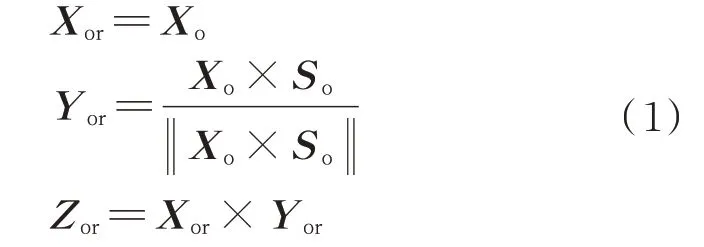
轨道系至轨道升高控制期望姿态的转换四元数为

beta 角的绝对值小于10°时,上述方法易出现姿态突变,因此令轨道升高控制期望坐标系与轨道坐标系平行。
轨控期间的卫星姿态控制采用飞轮控制,轨道控制完成后自主返回三轴稳定对日模式。目标姿态与轨控模式的关系见表2。
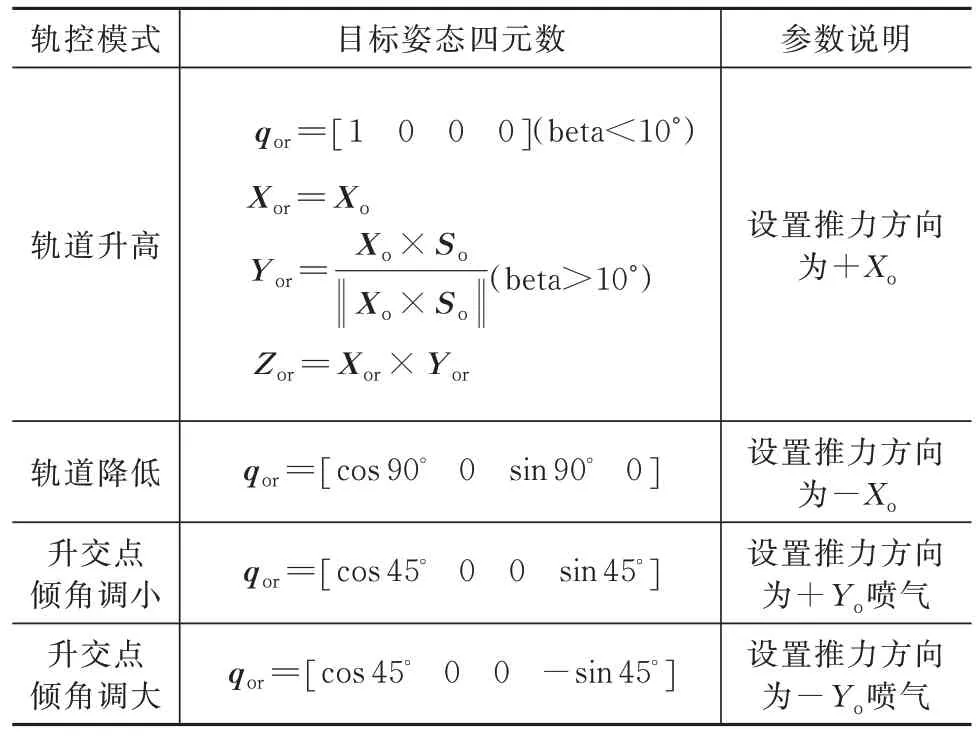
表2 目标姿态与轨控模式的关系Tab.2 Relationship between the target attitude and the orbit control mode
3 数学仿真
仿真条件:当前卫星轨道动力学模型考虑地球非球形(21 阶)引力摄动、气动阻力、太阳光压、太阳和月球引力摄动等完整影响因素;标称星轨道模型仅考虑地球非球形引力摄动。控制约束:轨控推力20 mN;单个轨道弧段轨控时长30 min;2 个轨道弧段轨控间隔60 min;单次轨道升高控制时长90 min;连续2 次轨控时间间隔不小于20 h;以当前卫星轨道幅角平根数超出标称星轨道幅角平根数0.1°且平半长轴低于标称星为轨控触发条件,进轨道升高控制。
由仿真结果(如图5~图10 所示)可以看出:当前卫星可实现与标称轨道相位自主保持控制,轨道幅角控制误差小于1°,可满足星座设计要求。在完成轨道相位保持的同时,可间接实现自主轨道高度保持和偏心率控制,轨道半长轴平根数控制精度优于500 m,轨道偏心率平根数逐渐降低。标称轨道与卫星星轨道面进动速度较为接近,3 个月后轨道倾角平根数相差0.005°量级,升交点赤经平根数相差0.04°量级。

图5 卫星与其标称星轨道平半长轴Fig.5 Quasi-mean semi-major axis of the local satellite and its nominal satellite

图6 卫星与其标称星轨道幅角误差Fig.6 Latitude argument error of the local satellite and its nominal satellite

图7 卫星轨控标志Fig.7 Satellite orbit control mark

图8 卫星与其标称星轨道倾角偏差Fig.8 Orbit inclination error of the local satellite and its nominal satellite
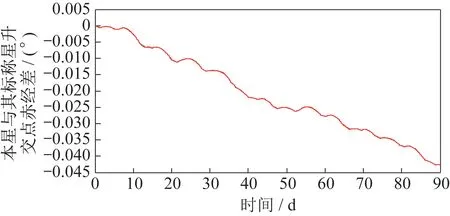
图9 卫星与其标称星升交点赤经偏差Fig.9 RAAN error of the local satellite and its nominal satellite
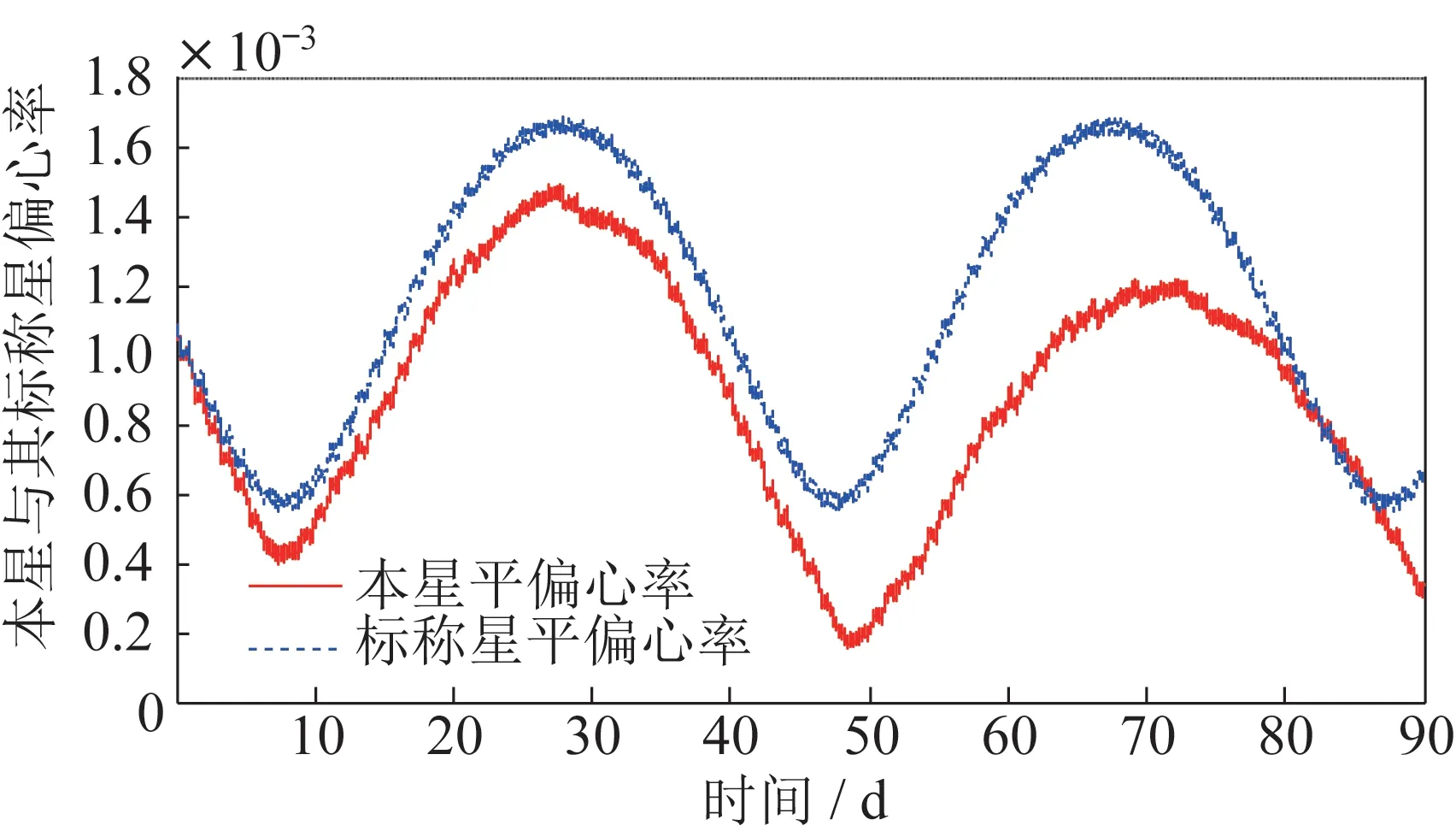
图10 卫星与其标称星偏心率Fig.10 Eccentricity of the satellite and its nominal satellite
4 结束语
以某对地观测星座任务为背景,根据电推进卫星长期在轨运行过程中,轨道保持控制受到的姿态、能源等约束,设计了基于标称轨道参数的自主轨道保持控制方案。在地面定期上注标称轨道参数的基础上,星载软件自主计算轨道保持控制触发条件,采用单边极限环思想避免了轨道降低控制以节省能源;通过轨道相位保持间接完成了轨道高度保持和轨道偏心率控制;通过自主的多次分段控制,解决了电推力器单次轨控时长超出姿态与能源限制的问题。通过数学仿真验证了长期自主轨道保持控制方案的有效性。