基于工况识别的混合动力汽车能量管理策略
2022-04-27严陈希耿文冉黄明宇朱建新
严陈希,耿文冉,黄明宇,朱建新
(1.南通大学机械工程学院,江苏 南通 226019;2.科力远混合动力技术有限公司,上海201501;3.同济大学汽车学院,上海201804)
1 引言
能量管理策略能够实现混合动力汽车(Hybrid Electric Vehi‐cle,HEV)多个动力源间的最优分配,而针对某一已知工况制定的能量管理策略,无法确保车辆实际行驶过程中的经济性最优。因此,若能根据车辆的实时状态识别当前行驶工况,再进行相应的能量分配,可使车辆运行在更高效的经济区域。
工况识别的能量管理策略受到研究者们的广泛关注。文献[1]以一款并联混合动力汽车为研究对象,采用学习向量量化神经网络设计工况识别器,建立了在线调整等效因子的等效燃油消耗最低能量管理策略(equivalent fuel consumption minimization strategy,ECMS);文献[2]针对不同交通状况,用遗传算法进行隶属函数参数和规则的调整,并控制策略间适当切换,实现动力总成的最佳功率分配;文献[3]设计了关于工况识别的模糊控制策略,并用不同驾驶循环评估所提策略的性能,证实了该算法可有效提高燃油经济性。
基于一种新型功率分流式混合动力汽车,研究了多种行驶工况下的自适应等效燃油消耗最低能量管理策略(adaptive equivalent fuel consumption minimization strategy,A-ECMS),由于该新型功率分流系统具有多种工作模式[4],结构也较现有研究的混动系统复杂,目前只有基于规则的实车控制策略,所以其策略有待进一步挖掘改善。提出以当量比油耗为A-ECMS策略优化目标的方案,相较于现有ECMS以综合油耗为优化目标,能避免瞬时需求功率的影响;选定五种典型工况,包括CLTC_P中低速段,更适应于我国道路交通特征;制定一种改进型粒子群算法,对各工况下的等效因子进行优化,能在得到各工况最优等效因子的同时保证工况运行后的SOC平衡;运用模糊控制器进行工况识别,在AMESim∕Simulink联合仿真平台上实时控制,并进行整车转毂试验。该策略可有效提高整车燃油经济性。
2 混合动力系统方案
基于一款四轴双行星排式的新型功率分流混合动力汽车为研究对象,动力系统结构,如图1所示。发动机ENG通过两个离合器分别与行星排PG1的行星架及PG2相连,电机E1、E2分别与双行星排的小太阳轮和大太阳轮相连。E1、E2根据策略可以作为驱动电机或发电机。整车及动力系统主要参数,如表1所示。

图1 HEV动力系统Fig.1 Powertrain of HEV
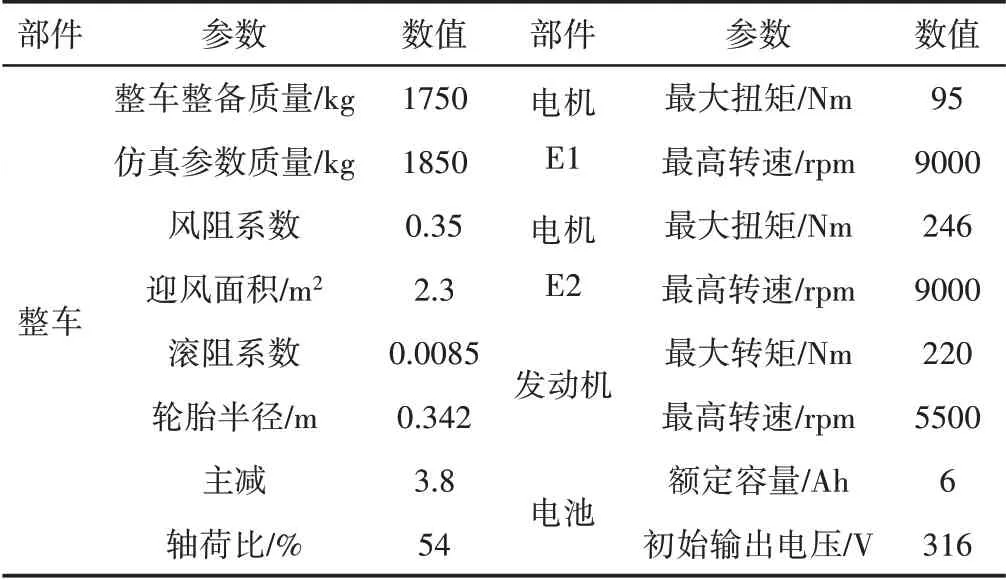
表1 整车及动力系统主要参数Tab.1 Vehicle and Powertrain Main Parameters
3 ECMS策略优化目标
ECMS策略即利用等效因子将每一瞬时的电量损耗等效为油耗[5],以其与发动机实际油耗ṁe的和最小为优化目标:

式中:P B—电池功率;ηdis(t)—电机驱动效率;ηchg(t)—电机发电效率;λ—符号函数,取值1或0;S c hg、S dis—充、放电等效因子;Ql hv—燃油热值,Qlhv=4.6·104∕J·g-1。
现有研究的ECMS策略以综合油耗为目标进行优化,而综合油耗的求取是在车辆反馈的瞬时需求功率下进行。实际上,对于每一瞬时时刻,车辆运行所需的瞬时功率不同,为了更准确反映总等效油耗最低的目标,本研究根据功率分配的关系,以当量比油耗Esys最小为优化目标。Esys指将变速箱与发动机ENG整体当作一个虚拟发动机,输入油,输出有效功率,其能量流动图,如图2所示。可表达为如下式:

图2 能量流动Fig.2 Flow of Energy
当电池充电时:

当电池放电时:

式中:Pe—发动机功率;PHo—整车需求功率;PB_o ut—充电下的电池功率;P B_ist—放电下的电池功率;BSFC—发动机比油耗;B S F C_e qu—A-E C M S策略下的等效因子。
由图2可知,当电池放电时,能量来源有两个,一个是从油箱输入到ENG的燃油,单位时间消耗的燃油量为Pe·B S F C;另一个来源是电池的电能,将它等效为油耗为Pe·BSF C_equ。两部分的能量共同驱动整车运行,输出功率为PHo。
当电池充电时,能量来源只有一个,即从油箱输入到发动机的燃油,单位时间所消耗的燃油量为Pe·B S F C;分两部分输出,一部分用于电池充电,输出功率为PB;另一部分用于驱动整车运行,输出功率为P Ho。
4 基于工况识别的A-ECMS策略
由于车辆实际行驶道路的不确定性,某一工况下的等效因子并不能保证车辆在实际行驶时的最优,需要实时识别出当前工况,进行相应能量管理,以达到更好的燃油经济性。
4.1 工况识别
4.1.1 工况分类
选取5种涵盖不同交通状况的典型工况:城市、郊区、高速工况,以及分别代表我国城市与郊区道路工况的CLTC_P(中国乘用车行驶工况)的低速段与中速段。工况图,如图3所示。

图3 五种典型工况Fig.3 Five Typical Driving Cycles
4.1.2 模糊控制器识别算法
因模糊控制算法具有较好的鲁棒性[6],且反复调试可实现较高识别精度[7-8],故采用模糊控制器识别算法。结合所选五种工况特征,选取的特征参数为平均车速vavg、怠速时间比r i与平均绝对加速度aavg,如表2所示。从表2中可以看出,所选特征参数区分度较大,足以相对准确的反应出工况类型。

表2 行驶工况特征参数Tab.2 Characteristic Parameters of Driving Cycles
建立vavg、ri与aavg三个特征参数的梯形隶属度函数,如图4(a)所示。经反复修改及验证,构建出具有较好识别效果的模糊规则,如表3所示。表中1-5依次表示CLTC_P_低速段、城市工况、CLTC_P_中速段、郊区工况及高速工况。

表3 工况识别模糊规则Tab.3 Fuzzy Rule Table for Condition Recognition
4.1.3 识别验证
为验证设置的模糊控制器识别效果,从五类典型工况中各随机选取10组,每组时间间隔为200s,得输入变量值,如图4(b)所示。最终得到图识别结果,如图4(c)所示。从图4(c)可以看出,只有两组识别有误,准确度达96%,符合工况识别准确度要求。

图4 隶属度函数、识别器验证的输入及识别结果Fig.4 Membership Functions,Recognizer Inputs and Recognition Results

4.2 最优等效因子求取
对于识别的工况类型,每个工况都存在对应的最优等效因子获得最佳燃油经济性。由式(2)、式(3)可知,以当量比油耗为优化目标时只需求取电池放电时的等效因子取值即可。
4.2.1 改进型粒子群优化算法
考虑到粒子群算法(PSO)[9-10]具有规则简单、收敛速度快等优势,选取PSO对等效因子进行寻优。提出一种改进型粒子群算法,通过Matlab编程实现优化算法,具体算法如下:在某典型工况下,随机产生第一次迭代等效因子值S1,运用ECMS策略得到S1对应的最优转矩分配,满足在该等效因子值下实现以等效燃油消耗最低的能量管理目标。将转矩分配加载入mat文件,程序实现自动运行当前工况下的联合仿真模型,并提取末端SOC反馈至.m文件,以SOC平衡为最终收敛目标建立如式(4)所示的收敛函数,取判断是否收敛值为0.01,即当△SOC大于0.01且迭代次数M还未达到最大迭代次数30时,调用不同粒子或更新迭代次数,继续判断S2是否收敛,以此类推;当△SOC小于0.01时或M大于等于30时,结束循环,当前等效因子即为该典型工况下最优等效因子。该改进型粒子群算法可以寻找到同时实现某一典型工况等效燃油消耗最低且工况SOC平衡所对应的等效因子值。具体流程图,如图5所示。

图5 改进型PSO算法流程Fig.5 Flow of Advanced PSO

式中:TVM*,nVM*—该工况下当前等效因子对应的发动机最优工作点分配;t—工况时长。
4.2.2 最优等效燃油系数
通过改进型PSO算法寻优得到的电池放电时刻下各典型工况最优等效因子,如表4所示。

表4 各典型工况最优等效因子值Tab.4 Optimal Equivalent Factors of Each Driving Cycle
4.3 A-ECMS能量管理策略示意图
根据瞬时时刻下模糊控制器识别的结果,调用各工况对应的最优等效因子,进行ECMS能量管理,实现能量源间的最优分配,总策略示意图,如图6所示。

图6 A-ECMS能量管理策略流程Fig.6 Flow of A-ECMS Energy Management Strategy
5 仿真分析
在MATLAB∕Simulink与AMESim联合仿真平台上进行仿真分析。随机组合5种典型工况形成综合测试工况,如图7(a)所示。设置初始电池电量SOC为50%。仿真过程中,基于模糊控制器算法的A-ECMS工况识别结果,如图7(b)所示。
因ECMS策略本身已对能量管理进行优化,为更直观的表明研究的A-ECMS策略的优越性,首先将ECMS和A-ECMS策略下的仿真结果分别与基于规则的实车控制策略进行对比分析。这三种策略下的电池SOC和发动机油耗变化,如图7(c)、图7(d)所示。对比分析可知,在满足SOC平衡时,实车控制策略下的发动机油耗为5.144L∕100km,ECMS策略下的发动机油耗为3.987L∕100km,相比实车控制策略下降22.5%;A-ECMS策略下的发动机油耗为3.876L∕100km,相比实车控制策略下降24.7%,相比ECMS策略下降2.8%。从以上数据可以看出,A-ECMS策略具有更好的燃油经济性。同时,A-ECMS策略下SOC波动幅度相比于ECMS策略降低了36.6%,波动更平缓,使动力电池工作在高效区域内。

图7 仿真结果分析Fig.7 Simulation Result Analysis
两种能量管理策略下的发动机工作点对比图,如图8(a)、图(b)所示。统计仿真结果得:ECMS策略下,发动机工作点分布在燃油消耗量为255g∕(kWh)以内的占比达到39.63%;A-ECMS策略下的占比达到46.19%,结合图8(a)、图(b)可以看出,A-ECMS策略的发动机工作点更有效的集中在高效区域,对油耗和排放均有所改善。


图8 发动机与电机工作点Fig.8 Working Points of Engine and Motors
两种能量管理策略下得到的电机工作点分布,如图8(c)~图8(f)所示。电机E1工作点在四个象限均有分布,存在电动和发电工况;电机E2主要工作在第一、二、四象限,存在电动和发电工况。除去为保持杠杆平衡电机锁止或空转的工作点以外,ECMS和A-ECMS策略下电机E1效率达到百分之八十以上的工作分布点分别占24.98%、35.24%;电机E2效率达到百分之八十以上的工作分布点分别占69.21%、71.69%。可以看出,A-ECMS策略下的电机相比于ECMS策略能工作在更高的效率区间。
综上所述,采用瞬时优化的ECMS策略能显著降低整车油耗;采用基于工况识别的A-ECMS策略,能根据实际行驶道路的变化,合理调整车辆工况切换,进一步提高燃油经济性。同时,采用A-ECMS策略能更好的实现各动力源间的动力分配及电池SOC平衡,使得发动机和电机运行在更高效区域内,从而实现降低整车综合油耗和提高系统效率的目标。
6 整车转毂试验
为了进一步验证A-ECMS策略的有效性,进行整车转毂油耗试验,如图9所示。设置转毂测试条件如下:大气温度24.6℃,大气压力102.8kPa,相对湿度30.7%,汽油密度0.7591g∕ml,测功机当量惯量1470kg等。

图9 整车转毂油耗试验Fig.9 Fuel Consumption Test for Vehicle Hub
由于试验条件限制,无法实现循环测试工况试验,选取天津城郊路谱为试验路况,分别进行ECMS策略和提出的A-ECMS策略下的实验验证。试验结果,如图10所示。为试验车速总体跟随良好,试验所得A-ECMS策略下的SOC轨迹及发动机油耗与基于本研究联合仿真模型得到的仿真趋势基本一致,验证了仿真模型的可行性。如图10(b)、图10(c)所示,试验测得的ECMS策略的油耗为4.664L∕100km,电量减少10.2%,试验测得的A-EC‐MS策略油耗为4.423L∕100km,电量减少2%。相比于ECMS策略,A-ECMS策略的油耗降低了5.2%,电耗减少了8.2%。
试验结果表明,基于工况识别的A-ECMS策略使车辆的燃油经济性进一步提高,验证了基于工况识别的自适应等效燃油最低能量管理策略的有效性及可行性。

图10转毂试验的油耗及SOCFig.10 Fuel Consumption and SOC Obtained From the Hub Test
7 结束语
(1)针对一款双行星排式的新型功率分流系统,采用模糊控制器进行工况识别,验证识别准确度达96%,并基于改进型粒子群算法求取各工况最优等效因子,建立了基于工况识别的自适应等效燃油消耗最低能量管理策略。(2)在MATLAB∕Simulink与AMESim环境下,建立联合仿真模型,仿真结果表明:在保持SOC平衡的前提下,ECMS策略和A-ECMS策略相比于基于规则的实车控制策略,发动机油耗分别降低22.5%和24.7%;A-ECMS策略相比于ECMS策略油耗降低2.8%,SOC波动幅度降低36.6%,且发动机及电机工作点更有效的集中在高效区域,证明了A-ECMS策略具有更好的燃油经济性。(3)基于研究提出的A-ECMS策略进行整车转毂试验,结果表明,相对于ECMS策略,整车电耗减少8.2%,油耗降低5.2%,进一步验证策略的有效性和可行性。
