基于数字航空测量的矿区勘测技术应用研究
2022-04-27卢翔峰蔚志国
卢翔峰,蔚志国
(1.中晋环境科技有限公司,山西 太原 030032; 2.山西华冶勘测工程技术有限公司,山西 太原 030032)
针对矿区工程地形条件复杂,勘查设计难度大等问题,如果采用传统勘查方式,不仅作业量大,也不符合政府的相关要求。同时,由于传统勘查作业,在获取现场测量数据后,才能确定路径,致使工人效率低、劳动强度大,由于受到现场测量的限制,一般确定的路径缺乏整体性和全局观,随着路线的向前推移,会出现对已确定方案产生颠覆性影响,造成工期滞后、效率难以提升以及重复工作量巨大[1]。鉴于此,国内学者对新型勘测技术进行了大量的研究,文献[2]采用RTK数字地形测量技术,利用首级RTM控制网,实施了研究区1:500数字地形测量,研究结果达到了期望的测量精度;文献[3]对航空重力测量技术、航空放射性测量技术、航空电测探测技术、高精度航空磁测技术、深地震主动源剖面探测技术、天然地震流动台阵技术、金属矿地震勘探技术、井中地球物理测量技术、地面电磁测量技术等研究了分析,归纳总结了不同方法的使用范围、基本原理、技术概况、技术特点以及应用效果,指导了矿区的勘查;文献[4]研究了GPS技术在控制测量中的应用,利用GPS定位技术,组建了参考站,应用在控制测量系统中,取得了一定实际应用价值。本文采用数字航空测量技术,对平定县龙泉山矿区进行精确测量,研究表明,该技术具有较好的实用性,并且取得了良好的勘测效果。
1 工程概况
平定县龙泉山矿区平均海拔为+750 m,东西线从测区西部通过,娘白线、石太线铁路从测区南部穿过,区内交通较为便利。
测区属暖温带大陆性季风气候,四季分明,春季少雨干旱多风,夏季炎热,冬季寒冷少雪。降雨天气主要集中在6—9月份,年平均气温10.8 ℃,最低气温-21.8 ℃,最高气温39 ℃,年平均降水量505.1 mm。霜冻期为10月上旬至次年4月下旬,无霜期年平均210 d。平定县矿产资源丰富,有无烟煤、高铝黏土、硫铁矿、白云岩、一般耐火黏土、玄武岩、石膏、石灰岩等,其中以煤蕴藏量最大,有悠久的开采历史。此次航测范围分两期划定,最终成图范围为东至下盘石村、南至岩会村、北至槐树梁村、西至东西线。东西长7.0 km,南北长5.7 km,面积约29.7 km2。测区范围如图1所示。
2 控制测量
2.1 选点与埋石
测区基础控制采用D级GPS控制网[5-8],按设计要求需布设12个控制点,并至少保证2点之间可以通视。根据实地踏勘情况,为对2个分区和全矿区有效控制,便于后续生产使用,两矿区周边点位尽量位于采区之外,同时交通方便利于使用,综合考虑布设8个点。
测区南部主要考虑到后期场站设计,同时将进行1∶2 000地形图航测作业,所以,设计4个点,2个一对,同时,尽量可与北部矿区周边点通视。根据收集到的周边高等级控制点分布情况和现场踏勘,决定选取离测区最近的2个省级C级GPS控制点进行联测。由于控制点“阳泉市”离矿区距离太远,为保证网形稳固,提高观测效率。在中间增设一临时点作为联测接续。所有控制点分布均匀,图形结构良好,有效控制了整个测区。已知点数据见表1。

图1 测区范围示意Fig.1 Scope of the survey area

表1 已知点数据Tab.1 Known point data
在具体选点和埋石过程中,基本要求按《全球定位系统(GPS)测量规范》(GB/T 18314—2009)执行。选点时应尽可能避开树木、高压电线、无线电发射源,以保证卫星信号的接收,同时有利于测量的扩展和联测。点位选在土质坚硬、基础稳固,易于点的长期保存及利用,在天线截止高度角15°以上的空间没有障碍物,满足GPS观测要求。相邻点位之间通视良好,远离大功率天线等电磁发射源,其距离大于200 m,并距离高压输电线大于50 m的开阔地带。埋设的标石采用P.O42.5普通硅酸盐水泥预制混凝土标石,安放铜制测量标志。标石统一行先行制作,其上顶面15 cm×15 cm,下底面25 cm×25 cm,高60 cm。普通标石及盖板规格如图2所示。
标石埋设时,将基坑底部的土层夯实整平;标石安放端正,回填土前,清除基坑内的杂物;回填土的湿度应适中,没有杂物,填土时在标石周围同时进行分层夯实,加盖30 cm×30 cm混凝土盖板,最后全部回填至高出地面20 cm左右。选点埋石结束后,按照统一格式及要求绘制GPS点之记。本次点名按“太钢”首字母“TG”,加区域“龙泉”山首字母“LQ”后接顺序号,如“TGLQ12”,表示本测区12号点。控制点网如图3所示。

图2 普通标石及盖板规格Fig.2 Ordinary mark stone and cover plate specifications

图3 控制点网图Fig.3 Control point network diagram
2.2 平面控制
(1)GPS网的观测[9-11]。作业使用4台I80型GPS接收机,经测前检定,仪器各项精度、技术指标均达到规范要求,平面精度为±(2.5+1×10-6) mm。能够满足施测设计精度要求。为保证观测精度,D级点均以边点混联方式构网,点名、天线高在测站直接置入仪器中,天线高读取采用不同方向3次读数,读至mm,较差小于3 mm。取3次读数平均数作为天线高。测前根据网上下载的星历表,选择良好的时段进行外业数据的采集,确保外业数据采集的质量。作业主要技术指标如下:卫星截止高度角15°;同时观测有效卫星数≥4;有效观测卫星总数≥4;观测时段数≥1.6;时段长度≥60 min;采样间隔5~15 s。
(2)GPS数据处理。基线处理采用CGO静态处理软件,该软件是目前国内较成熟的GPS随机解算软件之一。此次作业闭合环总数30个,其中同步环19个,异步环11个,闭合环最大节点数为3。最大边长11 729 m,最小边长647 m,平均边长3 627 m。共测基线33条,最弱边相对误差最大1/634 444 3。重复基线3条,长度较差最大为0.001 8 m,相对误差最大为1.22×10-6。本网作业采用边联结方式构网,使整个GPS网的精度大为提高。D级GPS控制网主要技术指标中,水平分量应≤20 mm,垂直分量≤40 mm。
(3)闭合环。①同步环相对闭合差最大4.07×10-6,最小0.06×10-6;②异步环相对闭合差最大2.21×10-6,最小0.35×10-6。经计算各分量闭合差限差为0.575 m。同步环和异步环的误差分析见表2。

表2 同步环和异步环的误差分析Tab.2 Error analysis of synchronous loop and asynchronous loop
(4)约束平差。约束平差采用CGO静态处理软件,为了使解算精度更高,先在WGS84—坐标下进行经典自由网平差,再用1980西安坐标系平差,3°带成果,中央子午线114°,以大地水准面为测区高程投影面,平差起算数据如下:①阳泉市,X、Y、H分别为4 190 929.430,38 463 912.812,678.365;②巨城,X、Y、H分别为4 201 127.118,38 475 374.299,573.641。
(5)平差后精度分析。①平差后WGS84坐标最弱点位误差:X为3.942 mm,Y为3.948 mm;②最弱基线相对误差为1/166 692 5;③约束平差后最弱基线相对误差为1/103 011 3;④单位权中误差为0.000 651 m;⑤平差后坐标最弱点位误差:dx为3.741 mm,dy为3.154 mm。
2.3 高程控制
高程采用GPS拟合,高程拟合:内符合精度中误差±0.864 mm。
3 数字航空测量
3.1 航摄区和航线的确定
根据航摄工作范围,采用2个航摄分区,在遥感影像图上规划航线[12-15]。航向重叠度70%,旁向重叠度65%,共7个飞行架次。航区划分如图4所示。

图4 航区划分Fig.4 Navigation area division
3.2 航摄仪选择
本研究摄影采用CW-007C航空摄影测量系统(图5)。CW-007C主要系统参数如下:类型固定翼;抗风能力6级风;翼展2 m;垂直方向定位精度3 cm;机身长度1.3 m;水平方向定位精度(1+1×10-6) cm;最大起飞质量6.8 kg;最高起飞海拔为4 500 m;任务荷载800 g ;实用升限5 000 m;续航时间60 min;起飞方式直升;最大速度100 km/h;着陆方式直降;巡航速度65 km/h;动力类别为电动。

图5 CW-007C航空摄影测量系统Fig.5 CW-007C Aerial Photogrammetry System
3.3 相机选择
此次航空摄影测量所选用相机为无人机专用相机SONY_A7RⅡ,其基本参数:相机类型为SONY_A7RⅡ;像素为7 952×5 340;像素大小为4.5 μm;CCD大小为35.9 mm×24 mm;焦距为35 mm。
3.4 航测作业
(1)地面控制测量。此次测量使用2台徕卡动态GPS GS14 RTK,以SXCORS(山西省连续运行基准网及综合服务系统)为基准,使用RTK网络模式进行图根控制点测量,坐标误差小于5 cm。该区像控点全部布设为平高点,北区布设9个点,南区布设18个点。在每个控制点采集之前对仪器进行初始化,固定解10″~15″后采集数据,重复测量3次,取3次测量平均值为结果,以保证控制点测量精度。区域网中布设控制点旁向不超过4~5条航线,按矩形布设。该测区北侧呈凸形,拐角处布设点应能控制住有效测绘面积,自由图边的像片控制点必须布设在自由图边外。按区域网大小,每个区域网布设1个检查点(平高点)。
(2)航空摄影测量。根据矿区范围规划摄影航线,以地面分辨率满足1∶2 000地形图要求设置航高为620 m,同一航线上相邻像片的航高差小于30 m,最大航高与最小航高之差小于50 m,实际航高与设计航高之差小于50 m。航向重叠度75%,旁向重叠度65%。各姿态角均保持在5°以内。测区基准面高度750 m。

3.5 数字化成图
本次摄影测量室内通过PhotoScan进行空中三角测量处理,生成数字高程模型和数字正射影像;并利用清华山维完成数字线划图的采集。高程注记点分布均匀,对地形特征点均注记了高程,高程注记为0.1 m。根据《1∶500、1∶1 000、1∶2 000地形图航空摄影测量数字化测图规范》(GB/T 15967—2008)要求,航测数字化测图精度应满足平地、丘陵地地物点中误差为0.6 mm;山地、高山地地物点中误差为0.8 mm。
高程中误差要求见表3。根据对野外地形进行RTK重采样检查,此次航测精度为:平面中误差0.572 m,高程中误差0.191 m,完全满足规范要求。本次航测数据为开放性入口,能读取文本格式的原始数据,图层分层清晰、线型和颜色库管理合理,数字注记准确,并具备了齐全的测量符号库。本次数字化成图严格按照ISO标准的程序操作步骤进行。可满足《低空数字航空摄影测量外业规范》(CH/Z 3004—2010)规范要求。采集地物、地貌数据时切准地物、地貌的特征点,进行全要素检查采集,做到不变形、不移位、无错漏。采集依比例尺表示的地物符号时,应以测标中心切准轮廓线或拐点连线;采集不依比例尺表示的地物符号时,应以测标中心切准其定位点、定位线,对模型不清的构(建)筑物(如房角、电杆等)无法准确定位时,务必在相应位置上作“A”标记,进行外业补测或调查。
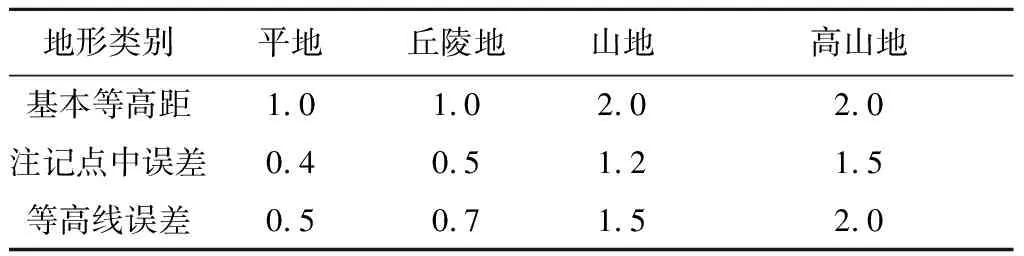
表3 高程中误差 Tab.3 Error in elevation m
4 测量结果
GPS控制点成果见表4,以1980西安坐标系为例。

表4 GPS控制点成果Tab.4 GPS control point results
地形图检查点精度检核见表5、表6,由于测量点较多,本文每隔20点,对检测坐标、图上坐标以及坐标差进行分析。由表6分析可知,监测点坐标和图上坐标之间的误差很小,符合相关国家标准,也验证该技术的实用性。

表5 地形图检查点精度检核Tab.5 Topographic map checkpoint accuracy check

表6 坐标差统计Tab.6 Coordinate difference statistics
5 结语
以平定县龙泉山矿区工程为背景,对控制测量进行了分析,依据航摄的工作范围,采用2个航摄分区,在遥感影像图上规划航线,得到了GPS控制点成果表以及地形图检查点精度检核表。研究表明,该技术具有很好的实用性,并且检测点坐标和图上坐标之间的误差很小,符合相关国家相关标准及要求。
