基于高精度输电通道地图的无人机线路巡检航线规划方法研究
2022-04-27金韬,王祎,杨洲
金 韬,王 祎,杨 洲
(国网衢州供电公司,衢州 324000)
我国电力输电线路长度随着生活用电和工业用电需求的提高不断增长,经过不断发展我国电网规模稳居世界第一[1-2]。输电线路巡检工作量随着输电线路的增长也不断增加,当今智能电网建设的需求无法通过传统的人工巡检满足[3-4]。输电线路巡检工作中采用无人机可以降低运维成本、减轻工作强度,同时提高了巡检工作的科学技术水平和巡检质量,具有广泛的应用前景和重要的研究意义[5]。
文献[6]提出基于并行粒子群的无人机线路巡检航线规划方法,该方法在转角角度约束的基础上构建航路规划代价模型,通过并行粒子群和RL 算法对航路规划代价模型进行求解,实现无人机线路巡检航线的规划;文献[7]提出基于遗传算法的无人机线路巡检航线规划方法,该方法从遗漏覆盖、多余覆盖和作业路程3 个方面分析无人机的作业方式,通过遗传算法与TSP 问题获得区域间无人机的作业顺序,在区间调度中通过二进制编码遗传算法对航线进行规划;文献[8]提出基于性能约束的无人机线路巡检航线规划方法,该方法对无人机的物理限制进行分析,根据分析结果构建性能约束模型,通过参数对无人机性能下降的程度进行分析,根据不同航段的任务需求结合分析结果设计无人机的巡检航线。上述方法没有构建输电通道地图,存在纬度偏差大、经度偏差度和高度偏差大的问题。
为了解决上述方法中存在的问题,提出基于高精度输电通道地图的无人机线路巡检航线规划方法。通过最近邻迭代算法修正无人机位置的相对位置偏差,建立高精度输电通道地图,通过人机高精度目标组合定位导航技术和三维航线智能规划技术,对无人机三维航线规划软件和无人机自动驾驶控制终端软件进行跟踪,实现基于无人机自动驾驶的精细化巡检和通道巡检。利用GPS/INS 组合导航实现无人机线路巡检航线的规划。有效提升无人机线路巡检航线规划效果。
1 基于点云直接配准的高精度输电通道地图构建
基于高精度输电通道地图的无人机线路巡检航线规划方法通过最近邻迭代算法进行点云配准,修正无人机位姿的相对位置偏差,建立高精度输电通道地图。
通过初始无人机位姿P1,P2,根据时间戳将t1,t2时刻对应的点源从局部坐标系转换到全局坐标系中:


式中:X1g,Y1g,Z1g代表的是点云c1中的点集合在t1时刻全局坐标系下对应的坐标矩阵;X1,Y1,Z1代表的是点云c1中的点集合在t1时刻局部坐标系下对应的坐标矩阵;X2g,Y2g,Z2g代表的是点云c2中的点集合在t2时刻全局坐标系下对应的坐标矩阵;X2,Y2,Z2代表的是点云c2中的点集合在t2时刻局部坐标系下对应的坐标矩阵。
在全局坐标系下采用最近邻迭代算法对c1,c2点云进行配准[9],分别将目标点云和源点云设置为c1和c2,通过式(3)将源点云c2转变为目标点云c1对齐的矩阵T21:

转换矩阵T21当初始无人机位姿P1,P2接近真值、误差极小时逼近单位矩阵I,结合上述公式,获得式(4):

式中:E21代表的是点云c2向点云c1在局部坐标系下的转换矩阵,其计算公式如下:

转换矩阵E21是无人机位姿P1向无人机位姿P2转换的矩阵,是连接边e12、顶点v1,v2的数值:

位姿图中边对应的置信度可以通过点云配准分数进行设计[10],即信息矩阵Einfo:

式中:I6代表的是六阶单位矩阵;Se代表的是配准分数。
基于高精度输电通道地图的无人机线路巡检航线规划方法建立高精度输电通道地图的流程如图1所示。
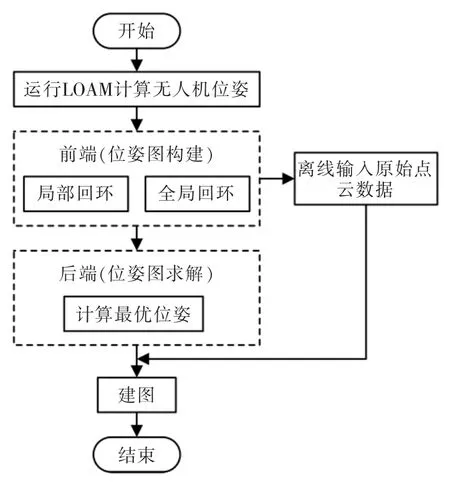
图1 高精度输电通道地图建立流程Fig.1 Establishment flow chart of high-precision transmission channel map
2 无人机线路巡检航线规划方法
通过人机高精度目标组合定位导航技术和三维航线智能规划技术,开发无人机三维航线规划软件和无人机自动驾驶控制终端软件[11-12],实现基于无人机自动驾驶的精细化巡检和通道巡检,系统结构如图2所示。
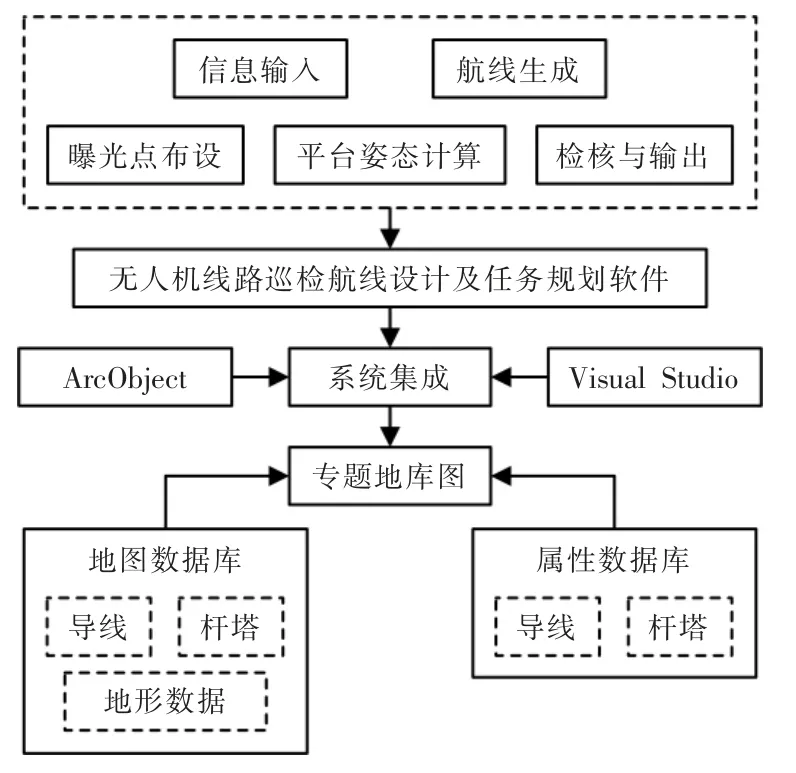
图2 系统结构框架Fig.2 System structure framework
通过结合无人机多维航巡情报融合技术和安全监控技术,在卡尔曼滤波算法的基础上利用GPS/INS 组合导航实现无人机线路巡检航线的规划。
设PGPS代表的是用户在地面获取的实际GPS位置信息,其计算公式如下:

式中:np代表的是噪声;P 代表的是真实的位置信号;bp代表的是漂移。
将卫星信号传输到流动站GPS 接收机中,获得卫星对应的位置坐标Pm[13],设PA代表的是流动站对应的精确位置坐标,可通过误差值ΔP 和位置坐标Pm计算得到:

差分GPS 定位原理如图3所示,INS 导航原理如图4所示。

图3 差分GPS 定位原理Fig.3 Principle of differential GPS positioning
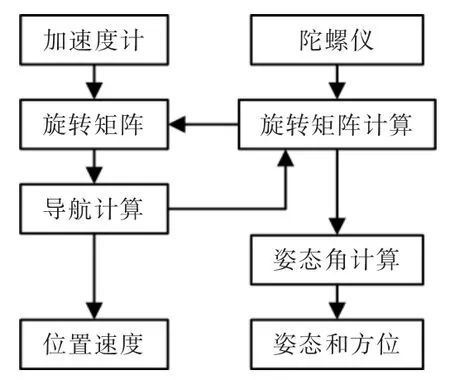
图4 NIS 导航原理Fig.4 NIS navigation principle
载体的加速度可以通过加速度计获取,载体的角速率可以通过陀螺仪获取,相对于导航坐标系,载体坐标系的旋转矩阵R 可通过计算角速率获取[14]。将比力通过旋转矩阵R 换算到计算坐标系中,计算3 个方向在比力坐标系下的加速度,积分处理加速度,获得载体的速度、位置等导航信息,INS 导航的基本方程如下:

设L 代表的是经度,可通过下述公式计算得到:
式中:L0代表的是初始经度;h 代表的是载体高度;R代表的是地球半径。
设λ 代表的是纬度,其计算公式如下:

式中:λ0代表的是初始纬度。
卡尔曼滤波器的第一步工作是预测现在状态:

式中:Xk-1代表的是上一时刻对应的最优预测值;Xk|k-1代表的是根据上一状态获得的预测结果;Uk代表的是现在状态对应的控制量;Φk|k-1,B 均代表的是系统参数。
通过式(14)更新协方差P:

式中:Pk|k-1为预测结果Xk|k-1对应的协方差;为Φk|k-1的转置矩阵;Pk-1为最优预测值Xk-1对应的协方差;Qk-1代表的是系统对应的噪声。
通过公式(15)实现递推的估计:
式中:Kk描述的是卡尔曼增益;Hk描述的是测量系统对应的参数;Zk描述的是k 时刻对应的测量值;Rk-1描述的是测量数据对应的噪声。
GPS/INS 组合导航系统结合了INS 导航和GPS导航的优点,在导航系统中成为发展的主要方向[15]。位置信息综合的原理如图5所示。
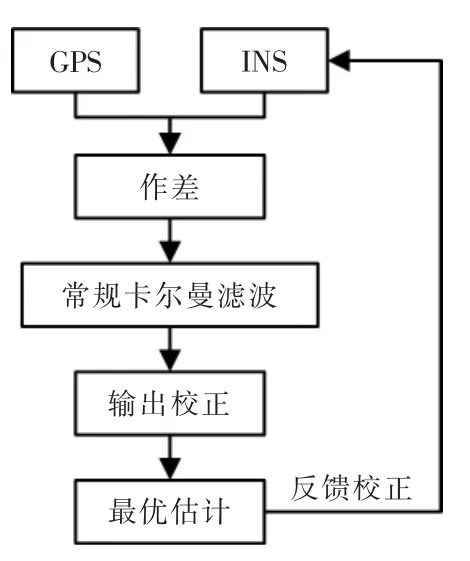
图5 导航系统原理图Fig.5 Schematic diagram of navigation system
设XINS代表的是组合导航系统对应的状态向量,其表达式如下:

式中:φn=[φeφnφu]T代表的是俯仰误差角、横滚误差角和航向误差角;δvn=[δveδvnδvu]T分别代表的是东向的速度误差、北向的速度误差、天向的速度误差;εb=[exeyez]T代表的是三轴陀螺随机常值漂移;δpn=[δL δρ δh]T分别代表的是纬度误差、经度误差和高度误差;Δb=[ΔxΔyΔz]T描述的是三轴加速度计随机常值零偏。
惯导系统对应的误差状态方程如下:

式中:WINS代表的是系统噪声;BINS代表的是系统噪声对应的转移矩阵;FINS代表的是系统对应的状态转移矩阵。
在三维方向上采用惯性导航系统和GPS 接收机输出的速度、位置之差作为外部观测量,设Z 代表的是外部测量,其计算公式如下:

式中:vIE,vIN,vIU代表的是在东向、北向和天向中惯性导航系统对应的速度。

式中:vGE,vGN,vGU分别代表的是东向、北向和天向中GPS 对应的速度。

式中:LI代表的是惯性导航系统对应的维度;ρI代表的是惯性导航系统对应的经度;hI代表的是惯性导航系统对应的高度。

式中:LG代表的是GPS 对应的维度;ρG代表的是GPS 对应的经度;hG代表的是GPS 对应的高度。
通过上述公式获得测量方程:

通过上述测量方程对无人机巡检航线进行测量,实现无人机线路巡检航线的规划。
3 实验与分析
为了验证基于高精度输电通道地图的无人机线路巡检航线规划方法的整体有效性,需要对基于高精度输电通道地图的无人机线路巡检航线规划方法进行测试,实验中计算机配置为:64 位linux 系统,处理器为2.5 Hz,RAM12.0 GB,Intel Core i5。将纬度偏差、经度偏差和高度偏差作为测试指标,采用基于高精度输电通道地图的无人机线路巡检航线规划方法(方法1)、基于并行粒子群的无人机线路巡检航线规划方法(方法2)和基于遗传算法的无人机线路巡检航线规划方法(方法3)进行测试,测试结果如图6、图7和图8所示。

图6 不同方法的纬度偏差Fig.6 Latitude deviation of different methods
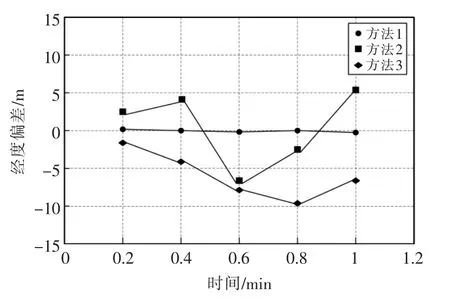
图7 不同方法的经度偏差Fig.7 Longitude deviation of different methods
注:纬度偏左为正值,纬度偏右为负值;经度偏前为正值,经度偏后为负值;高度偏高为正值,高度偏低为负值。
分析图6可知,当时间为0.2 s 时,方法1 的纬度偏差为0 m,方法2 的纬度偏左2 m,方法3 的纬度偏左4 m。当时间为0.8 s 时,方法1 的纬度偏差0 m,方法2 的纬度偏左3 m,方法3 的纬度偏右3 m。由此可知,本文方法纬度几乎没有偏差。
分析图7可知,当时间为0.2 s 时,方法1 的经度偏差为0 m,方法2 的经度偏前2.5 m,方法3 的经度偏后为1 m。当时间为0.8 s 时,方法1 的经度偏差0 m,方法2 的经度偏后2 m,方法3 的经度偏后9 m。由此可知,本文方法经度几乎没有偏差。
分析图8可知,当时间为0.2 s 时,方法1 的高度偏高0.1 m,方法2 的高度偏高11 m,方法3 的高度偏低为7 m。当时间为0.8 s 时,方法1 的高度偏差为0 m,方法2 的高度偏高6.5 m,方法3 的高度偏低2.5 m。由此可知,本文方法高度几乎没有偏差。
综合分析图6、图7和图8可知,在测试过程中方法1 的纬度偏差、经度偏差和高度偏差基本上均为0,方法2 和方法3 的纬度偏差、经度偏差和高度偏差较大,偏差越小,表明方法规划的航线越精准,因为方法1 通过最近邻迭代算法进行点云配准,修正无人机位姿的相对位置偏差,建立高精度输电通道地图,在卡尔曼滤波算法的基础上利用GPS/INS组合导航实现无人机线路巡检航线的规划,降低了纬度偏差、经度偏差和高度偏差。

图8 不同方法的高度偏差Fig.8 Height deviation of different methods
4 结语
自然环境灾害、外部人为破坏和输电线路部件自身老化、劣化等原因都会影响电网的稳定、安全运行。在电力巡检工作中常规人力巡检方法存在技术难度高、不安全和低效等问题,人力巡检逐渐被无人机巡检代替。当前无人机线路巡检航线规划方法存在纬度偏差大、经度偏差大和高度偏差大的问题,提出基于高精度输电通道地图的无人机线路巡检航线规划方法,利用GPS/INS 组合导航技术在高精度输电通道地图的基础上实现无人机线路巡检航线的规划,降低了纬度偏差、经度偏差和高度偏差,为无人机在线路巡检领域中的发展奠定了基础。
