基于XSim 仿真平台的榴弹炮建模与弹道仿真
2022-04-27刘波韬李定主王学文岳忠奇张智锋
刘波韬,李定主,王学文,田 川,岳忠奇,张智锋
(北方自动控制技术研究所,太原 030006)
0 引言
在现代战争中,炮兵营下辖的榴弹炮分队是重要的火力分队。为了提高榴弹炮作战能力,除了武器研制外,通过武器的模拟仿真、优化分析,为我军武器性能的检验提供极为重要的平台。由于平台种类多,每个平台内的武器很难跨平台使用或者可以统一描述一个稳定的基础武器单元。因此,在设计跨平台、稳定统一的榴弹炮CGF(计算机生成兵力)的仿真模型,通过提升模型的通用性和稳定性,可以为陆军仿真平台的搭建提供有价值的通用设备单体模型。以组件化的建模思想,将单体模型拆解成可重用插件,并结合榴弹炮行动过程中重火力、重位置的特点进行仿真模拟。模型的设计流程概括为:数学逻辑模型建模-软件程序建模-模型数据组配-模型校验和验证-模型系统集成。
在具体武器模型的仿真领域,有建立多特征信息证据合并的不确定性地空导弹感知行为模型,有模拟单体坦克机动、火力和侦察的模型研究,以及坦克分队的人类个体和群体仿真的问题,有构建单体机动模型的设计实现。
在单体模型实现的过程中,数学建模以及软件建模和实现是基础,而武器建模的核心是它的行为模型,因此,梳理榴弹炮的基本结构和模拟训练榴弹炮的各种行为是我们的研究重点。其中,炮弹的弹道模型直接影响榴弹炮的射击行为仿真。
1 模型设计
榴弹炮单体仿真模型是一个高分辨率的平台级武器模型,传统的仿真平台,最具代表性的设计是基于高层体系结构(HLA)框架下构建的作战仿真系统。
基于国内仿真平台设计出通用性的榴弹炮CGF 系统,需要了解榴弹炮的军事需求、所在环境。分析榴弹炮的结构组成和交互的信息。考虑榴弹炮的行驶速度、俯仰角度并结合与目标的相对位置等信息,设计出榴弹炮的实体模型和行为模型。
1.1 设计原则
基于面向对象、行动过程,根据实体-行动-任务-交互的建模理论,将实体根据内部组成和交互机制组件化为平台和装备,并将武器的属性数据和状态信息参数表述,将作战规则和战场环境定量化为初始信息。
设计原则包括:1)榴弹炮因为炮管内壁有膛线,发射时,膛线通过诱导弹丸旋转,保持弹丸飞行时候的状态稳定,炮身身管较短、初速度较小、弹道较弯曲的特点,因此,具备对遮挡物后目标、反斜面目标和水平目标进行打击;2)发射轨迹与榴弹炮本身、地形、气候、风速、风向、障碍物等因素有关;3)榴弹炮重点集中在敌我双方的相对位置和我方的有效火力强度和范围;4)榴弹炮的弹道模拟在榴弹炮移动的时候,会影响其弹道方程,增加方程的误差,因此,需要考虑这种扰动的影响。
1.2 模型开发环境
本次武器模型使用的仿真环境是国内的仿真软件XSimStudio。平台建模粒度支持组件化、非组件化、聚合/解聚等方式;其中单体模型采用了组件化建模设计思想,将仿真实体按照专业和功能拆分成不同的组件,分别建模,再通过组装的方式形成仿真实体;平台支持C++、C#开发语言,模型框架具有可完全替代性;除此之外,平台增加了分布式支持工具、改进效率并且提高易用性;在XSim 平台上,榴弹炮的火力射击行为,通过分析解算榴弹炮的弹道方程,并使用Python 语言进行模拟仿真,最后得到火力射击范围。
2 榴弹炮模型建模
由于武器结构多层次的特点,因此,按照功能组件化装配好的榴弹炮模型,设计榴弹炮实体与同分辨率作战实体交互行为,对榴弹炮的军标、位置、方向、幅员范围、任务标志、状态、情报信息和战场环境进行精细化仿真。
仿真实体模型的精细化建模框架如图1 所示。

图1 精细化建模框架图
2.1 组件化建模
组件化建模是在面向对象的基础上以模块化的设计为核心,对仿真实体的要素和行为特征进行梳理,将研究对象按照功能拆分成组件,并以核心组件进行建模。“组件化”的核心思想是将研究的对象比作一个容器,由一系列组件的聚集来描述对象。对象外部行为通过容器内聚集的组件来体现。组件之间通过共享数据和控制指令的方式实现信息传递,组件化建模实体如下页图2 所示。

图2 组件化建模实体示意图
组件化建模流程如图3 所示。

图3 组件化建模流程图
其中,组件设计是关键,它对应实体对象的具体分类和描述粒度,最终影响所构建的对象模型。
2.2 实体模型设计
根据榴弹炮的构造组成,其实体内部包括榴弹炮炮体、弹药、瞄准镜、夜视仪和电台等基本设备。因此,榴弹炮的装备组成可分为榴弹炮装备、火力单元、弹药类型等。装备组件又可分为机动组件、传感器组件、武器发射装置组件、通信设备组件、干扰设备组件、防护组件、弹药组件、特征组件8 类装备组件模型。榴弹炮的具体组件构成是:机动组件负责对平台级武器的越野机动能力、道路机动能力、爬坡能力、涉水能力、跃壕能力、油耗等进行描述;传感器组件负责对距离、视场、天气气候、地形和目标特征识别进行描述,实现对实体的探测方式和探测能力进行建模;武器发射装置组件对发射器的武器性能例如:射速、弹容量、有效射程、直瞄打击性能等进行描述;通信设备组件描述带宽、延迟、跳频频率等通讯性能参数;干扰设备组件描述干扰距离、干扰范围、干扰频率等能力;防护组件是描绘武器前部、后部、顶部、侧部以及底部的防护能力;弹药组件主要描述其毁伤性能;特征组件主要描述雷达截面积、波动类型等;榴弹炮装备设计如图4 所示。
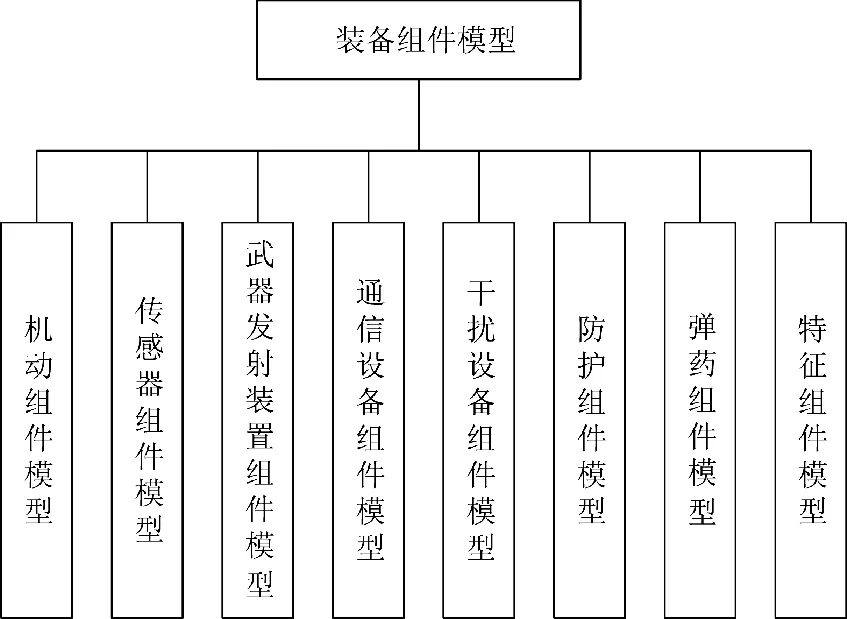
图4 榴弹炮装备设计图
榴弹炮精细化模型如图5 所示。

图5 榴弹炮精细化模型示意图
下面分析榴弹炮的弹道毁伤模型来描绘炮弹的飞行状态,并验证模型的有效性。
3 榴弹炮模型的弹道解算模型
弹道模拟仿真的理论依赖于外弹道学、空气动力学、数值分析、计算机应用等学科知识。
本课题中的弹道,是在炮弹弹丸脱离炮口飞到弹着点或者落点过程中的飞行状态,即质心所经过的路线。设计过程是:首先从基本的真空弹道着手分析,建立外弹道模型,分析弹丸模型在仅受重力因素的条件下,弹速、弹重等因素对飞行轨迹的影响;其次,在真空弹道的基础上,分析弹丸在具备空气阻力的环境下,流动的扰流效应、气温、气压、科氏力等影响因素,弹道模型建立了气压函数、气温函数等相应的数理模型。基于大数定律,将多种扰动因素简化为方位向和高低向的误差扰动变量,依据射表的公算偏差值,建立弹道落点的散布模型,逼近实际弹丸的散布统计特征。本课题建立的弹道模型,其特点是以射表为真值,建立修正模型,将理论弹道轨迹朝着实际射表弹道轨迹逼近,实现射表弹道的复现和反推。经过实验验证,逼近精度小于1%;以射表的公算偏差值为统计特征真值,建立散布模型;最后的弹道模型计算方法将是基于真实环境下的物理因素,仿真效果逼真度高、同时可修正、可定制,灵活性强。
3.1 弹道坐标转化模型
榴弹炮的炮弹火力范围跟炮弹的火力爆炸威力和弹道轨迹有关。在实际作战中,天气、地形、电磁环境、装备特性、人员素质等因素都会直接或者间接地影响弹道轨迹。为了能尽可能真实地模拟弹道轨迹,首先将弹道轨迹拆解为内弹道解算和外弹道解算两部分,内弹道模型与炮弹的材料,火药的重量,导弹的形状、材质,弹道尾翼形状,引信等内在因素有关,外弹道轨迹受到弹丸初速、旋转角速度、弹丸发射速度、弹丸形状、质量和空气阻力、风向、风力、风速以及偏流等因素影响。因此,仿真环境下,将外弹道模型在初速度假定情况下,根据炮弹动力学模型和周围的环境气象风速等影响,对弹道进行解算、建模和仿真。
同时,使用弹道微分方程-四阶龙格库塔方法求解射击诸元,可以保证结果的通用性和精确度,并且适应计算量日益增加的弹道方程和日益复杂化的武器系统升级。
弹道解算模型具有以下几个功能:1)具备接收和解算简易气象报文、精密气象报文功能;2)具备根据弹道方程,实时解算弹丸时域空间轨迹的功能;3)具备自适应弹道系数,提高计算精度功能;4)具备根据外部扰动因素,计算弹丸落点散布功能。输入参数包括:击发事件R(t)、风速分量(W(y),W(y),W(y))、弹道系数C、温度T(y)、射角θ、初速v、大地坐标系x(x)、大地坐标系y(y)、大地坐标系z(z)、导弹高度y、射角误差E、方位角误差E、初速误差E、弹道系数误差E,输出参数包括:坐标x、坐标y、坐标z、时间标签t、速度v、角度θ 等参数。弹道诸元信息为P(x,y,z,t,θ,v),其中,x,y,z,θ 为弹丸位置和角度信息,t 为弹丸诸元信息时间戳信息,v 为弹丸速度矢量。弹道解算模型输出诸元信息全部基于弹丸局部坐标系,坐标系原点为炮口,XOY 坐标面,垂直于水平面,与炮目连线重合。弹道模型如图6 所示。
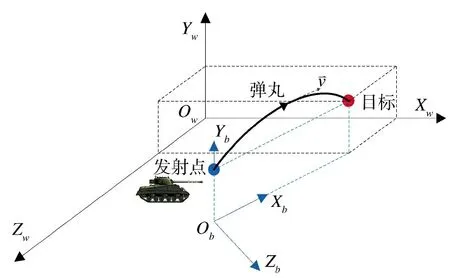
图6 某弹道诸元矩阵转换示意图


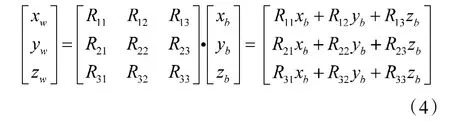
将上式简写为:
若两坐标系原点重合,则转换坐标为:
若两坐标原点按照向量t 偏移,则偏移后的坐

进一步通过化简得到:
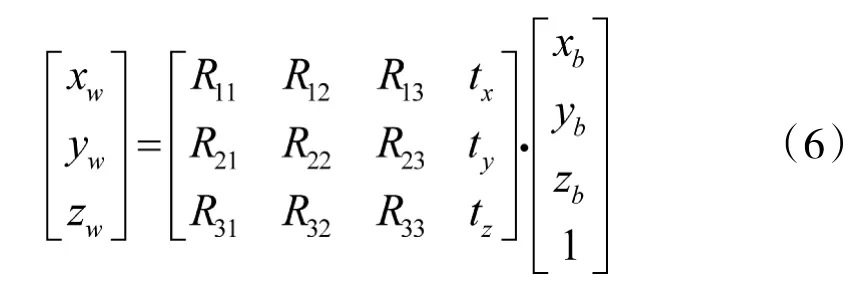
我们依据式(6),可以推导出它的增广矩阵形式为:

即:

3.2 弹道诸元计算
榴弹炮属于压制类武器,由于射程较远,因此,科氏惯性力、地球自转、地表曲率3 个要素,在压制类武器弹道解算中无法忽略不计。在非标准气象条件下,外弹道模型采用气象条件非标准时的弹丸质心运动微分方程:
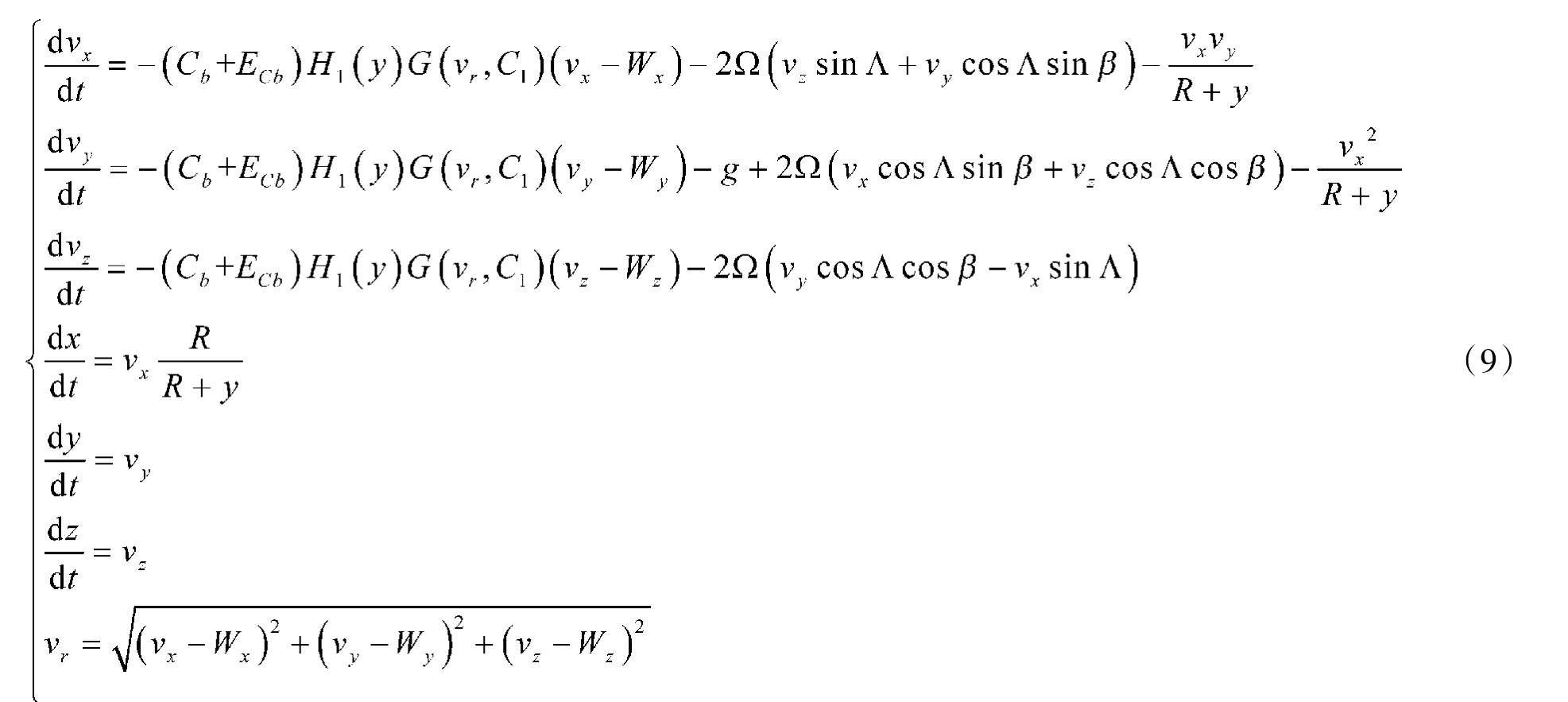
其中,Ω 为地球自转角速度矢量,Λ 为纬度,R 为地球半径。
3.3 数值计算流程
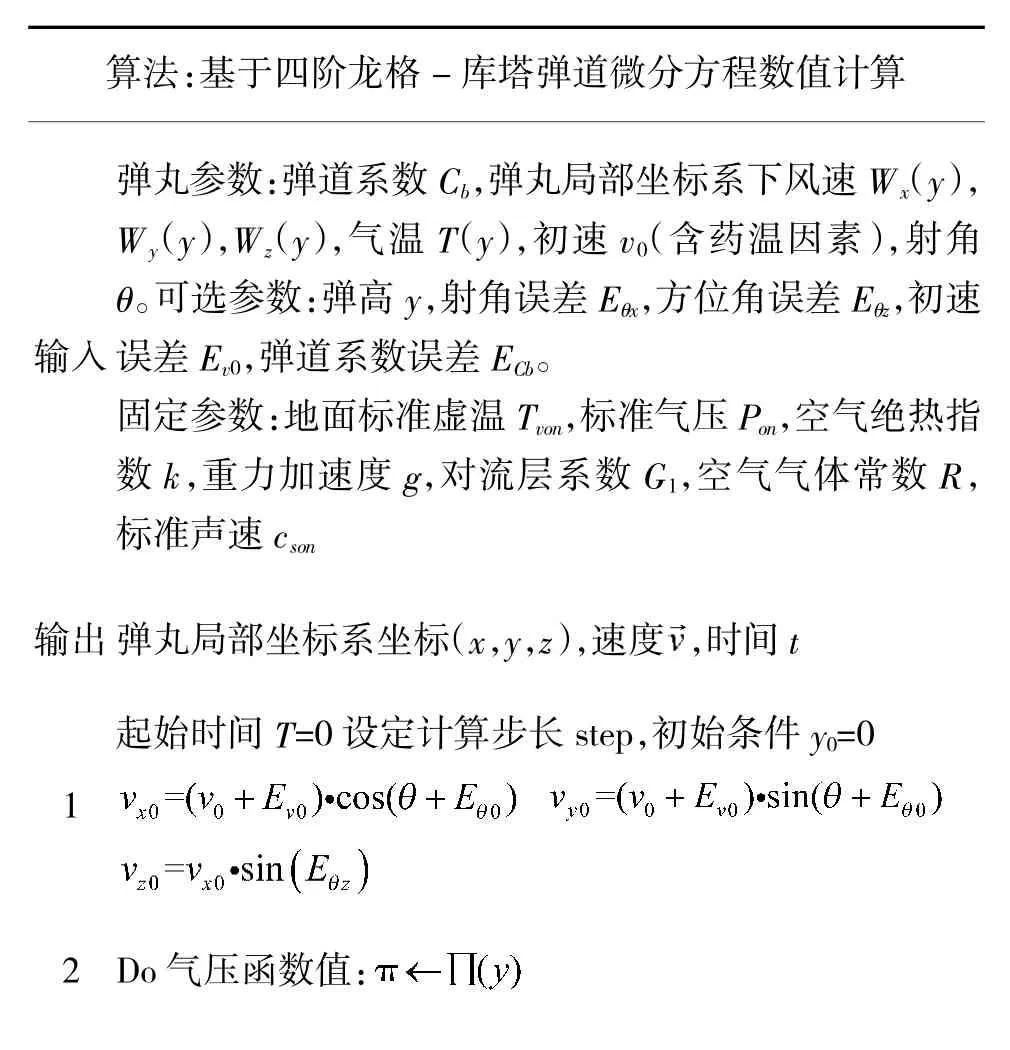
算法:基于四阶龙格-库塔弹道微分方程数值计算输入弹丸参数:弹道系数Cb,弹丸局部坐标系下风速Wx(y),Wy(y),Wz(y),气温T(y),初速v0(含药温因素),射角θ。可选参数:弹高y,射角误差Eθx,方位角误差Eθz,初速误差Ev0,弹道系数误差ECb。固定参数:地面标准虚温Tvon,标准气压Pon,空气绝热指数k,重力加速度g,对流层系数G1,空气气体常数R,标准声速cson输出 弹丸局部坐标系坐标(x,y,z),速度images/BZ_180_874_2866_895_2902.png,时间t起始时间T=0 设定计算步长step,初始条件y0=0 1images/BZ_180_324_3019_727_3067.pngimages/BZ_180_755_3018_1153_3068.pngimages/BZ_180_324_3090_578_3140.png2 Do 气压函数值:images/BZ_180_579_3194_731_3236.png
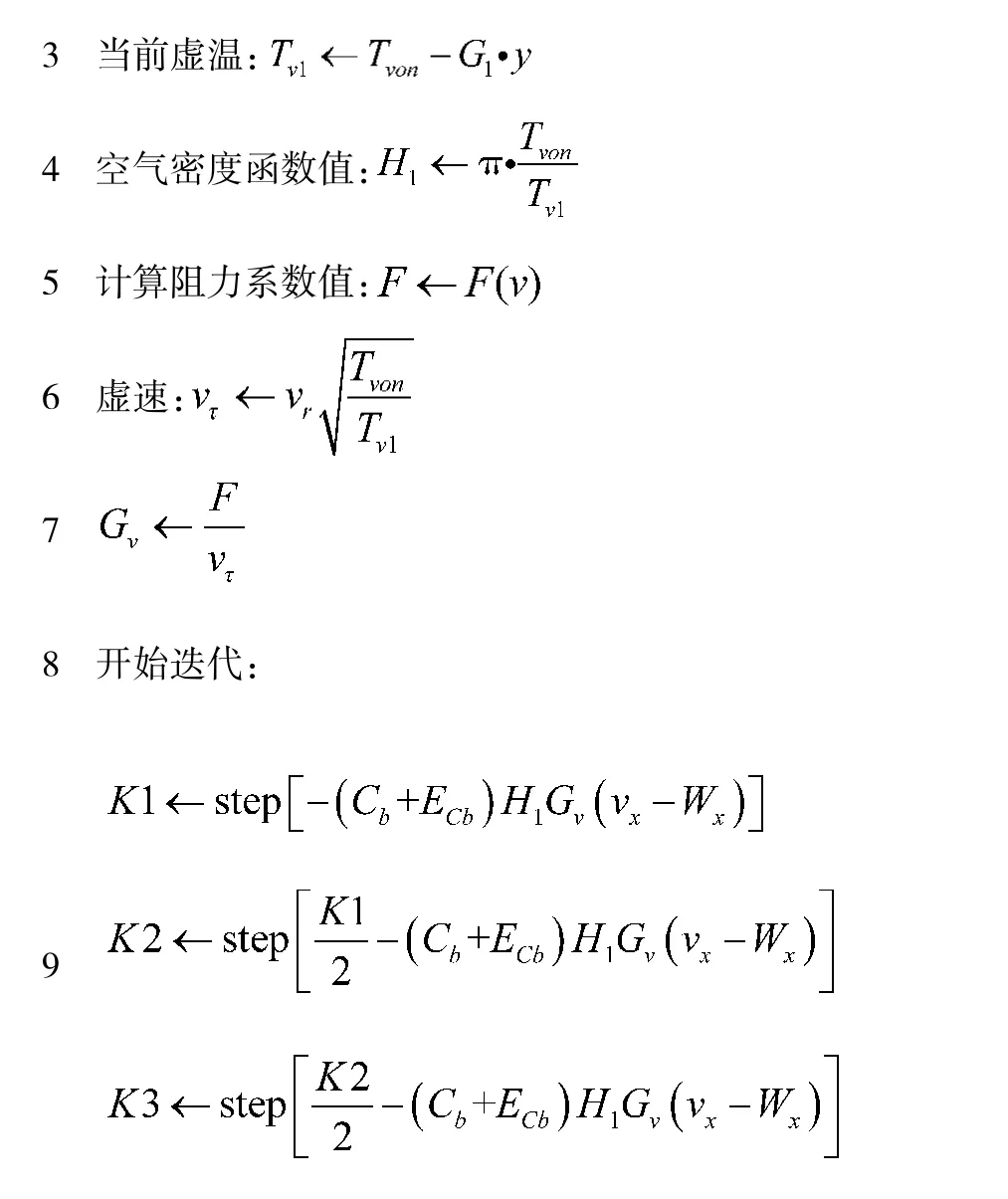
3 当前虚温:images/BZ_180_1552_2114_1829_2163.png4 空气密度函数值:images/BZ_180_1663_2201_1869_2306.png5 计算阻力系数值:images/BZ_180_1663_2344_1835_2391.pngimages/BZ_180_1477_2415_1711_2550.png6 虚速:7images/BZ_180_1384_2554_1542_2678.png8 开始迭代:9images/BZ_180_1384_2847_2138_3260.png
images/BZ_181_324_345_1078_552.png10 更新images/BZ_181_398_580_932_648.png11 While y>高度限定
4 实验结果及分析
实验目的是使榴弹炮的实体模型能近似模拟仿真榴弹炮的各项数据以及行为模型,推演其在作战过程中遇到敌方目标后的数据交互和行动推演。
4.1 实验准备
弹道的射表真值分布,利用二分法让仿真值尽量逼近真值。然后统计数值分布,推导出指数拟合的传递函数比较符合值分布规律,建立距离和方位向公差函数。根据弹道系统的射表真值与理论值的差别,其中,射表公算偏差趋势是真实的弹着点分布情况,分别为距离和方位的公算偏差,在基于龙格-库塔方程计算中,由于存在的多个误差扰动量会使得射表真值和理论值误差大,建立散布模型仿真的时候,将方位向的散布主要由方位角误差E决定,射距方向的散布由射角误差E、弹道系数误差E、初速误差E决定。因此,仿真的扰动变量简化成两个变量,分别是射角误差和方位角误差,得到的变化趋势如图7 所示。

图7 仿真扰动变量趋势图
采用Python 模拟炮弹的弹点,可以看出,炮弹随着射程增加,弹道距离和方位的仿真散布变化趋势如图8 所示,射角方差与方位角方差逐渐增加,基本符合射表公算偏差规律,其仿真结果如下页图9 所示。
图8 散布方差和射表公算偏差趋势图
图9 弹道仿真变化趋势图
根据仿真数据,传递函数复合指数拟合函数,因此,建立好射表公算偏差至距离向公差传递函数以及射表公算偏差至方位向公差传递函数后,可以模拟仿真炮弹的火力范围,接着在XSim 仿真软件中模拟武器实体模型TSWeaponEntity,行动实体TSOPEntity 以及各个行为对应的函数。例如:编队、边界线资源、传感器开机指令和状态、到达路径点、到达最后路径点、弹性碰撞、发射武器信息等,设置的函数如图10 所示。

图10 榴弹炮武器模型设计菜单
假设敌方目标按照预定好的路线进行行动,我方榴弹炮在区域侦察巡逻的时候发现敌方目标,将情报汇报给指挥所,根据指挥所的打击命令,榴弹炮依据目标类型进行武器选择。装弹后,将发射炮弹对目标进行火力射击。炮弹组件如图11 所示。

图11 榴弹炮炮弹挂载组件
4.2 实验结果
基于以上实验场景,首先设定好任务清单组件中的一个任务内容,将任务的参数进行排序和编辑,仿真开始以后,编辑设计好的预案和想定,将实体模型和弹道轨迹录输入实体模型里,根据毁伤的数据和仿真推演的数据,编辑炮弹毁伤的区域信息,区域参数编辑框如图12 所示。

图12 区域参数编辑框
图13 给出了榴弹炮的火力范围展示,可以看出,在整个训练过程中,仿真对敌我双方的目标分布和态势显示进行了形象直观的二维展示。同时通过弹道方程得出的炮弹落点,可以大致仿真模拟榴弹炮的火力范围,仿真结果清晰明确。

图13 榴弹炮火力范围展示
5 结论
本文针对榴弹炮作战训练的仿真模拟问题,提出一种基于组件方法构建榴弹炮实体模型,采用弹道微分方程- 四阶龙格库塔方法计算炮弹的弹道轨迹,模拟仿真榴弹炮的火力范围。通过实验仿真,改进算法,具有更简便、真实的仿真效果,满足实时决策,使得虚拟战场上榴弹炮的仿真和火力范围更为真实。在未来的仿真中,将进一步优化榴弹炮的实体模型和弹道模型,增强算法的通用性。
