KUKA.Sim Pro和KUKA.OfficeLite在工业机器人操作与编程教学中的应用
2022-04-26刘文光
刘文光
(济南职业学院,山东 济南 250103)
目前很多高校开设KUKA工业机器人相关课程[1-4]。对于KUKA工业机器人操作与编程,前期教学可采用 KUKA.Sim Pro 和 KUKA.OfficeLite软件相结合的方式,在虚拟环境中离线编程并模拟现场操作与示教编程,待学生掌握常用指令并熟悉设备操作后,后期教学再利用实际硬件设备进行实训。以下给出利用 KUKA.Sim Pro 和 KUKA.OfficeLite实现工业机器人操作与编程的教学案例。
1 教学目标
通过授课,使学生掌握KUKA工业机器人点到点运动指令PTP、线性运动指令LIN、圆弧运动指令CIRC、设置数字输出端指令OUT、等待时间指令WAIT的使用;理解使用工具坐标系的意义;掌握利用示教器创建工具坐标系的方法[5]。
2 教学准备
打 开 KUKA.Sim Pro 3.1.2 软 件, 在“ 电 子 目录”中按以下路径:公共模型 KUKA Sim Library 3.1TutorialsSection_30_Tool_Base_DefinitionSection_30_Layout找 到Section_30_Layout_Basis_Cell,将其导入到3D世界中。将立方体Cube导入到3D世界中,利用“捕捉”将立方体Cube放到弹仓Magazine的适当位置。
为了在虚拟环境中仿真夹爪的加紧与松开动作,将夹爪Gripper-Training的组件属性J1_Closed设置为0;J1_Open设置为-7。将夹爪组件Gripper-Training的J1_ActionSignal信号与工业机器人KR 6 R900 sixx的Out 1连接。
将 KUKA.Sim Pro 和 KUKA.OfficeLite建 立 连接[6],可利用KUKA.OfficeLite软件提供的虚拟示教器将工业机器人KR 6 R900 sixx的A1轴调整到0°;A2轴调整到 -90°;A3轴调整到 90°;A4轴调整到0°;A5轴调整到0°;A6轴调整到0°,调整完成后断开连接。
该虚拟工业机器人工作站如图1所示。

图1 虚拟工业机器人工作站
3 运动指令与逻辑指令应用的教学实施
编程实现以下功能:利用安装在工业机器人KR 6 R900 sixx第六轴法兰盘上的夹爪Gripper-Training,将立方体Cube从弹仓Magazine中取出,搬运到3d工作台Table_with_shape.3ds的指定位置,如图2所示。

图2 立方体的搬运
为了与后续通过虚拟示教器创建的工具坐标系对照比较,此处在KUKA.Sim Pro 3.1.2软件中通过“捕捉”创建如图3所示的工具数据TOOL_DATA[1]。为了避免抓取错误,可以将KR 6 R900 sixx的组件属性Outputs动作配置设置如下:信号动作输出1的抓取检测体积大小X设置为0;Y设置为50;Z设置为10,使用工具设置为TOOL_DATA[1]。
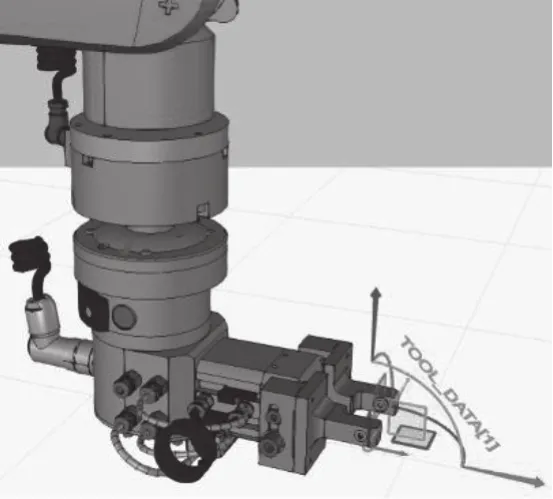
图3 工具数据TOOL_DATA[1]
在 KUKA.Sim Pro 3.1.2 软件中编程过程如下。
1)利用关节运动将工业机器人KR 6 R900 sixx的6个轴调整到合适的安全位置,设置该安全位置为HOME位置,添加PTPHome指令。
2)创建抓取立方体子程序Take_Cube:添加OUT指令将夹爪松开,添加WAIT指令延时0.5s。参照世界坐标系,利用线性运动将工业机器人移动至合适的过渡点,添加PTP指令,该过渡点设置为P1。参照世界坐标系,利用线性运动将工业机器人移动至立方体的抓取点,添加LIN指令,该抓取点设置为P2,持续参数需要设置为空。添加OUT指令将夹爪加紧,添加WAIT指令延时0.5s。复制过渡点P1处的PTP指令,将PTP转化为LIN,该点设置为P3。添加PTPHome指令。
3)创建放置立方体子程序Drop_Cube。
4)在主程序中调用抓取立方体子程序Take_Cube和放置立方体子程序Drop_Cube。抓取与放置立方体程序如图4所示。

图4 抓取与放置立方体程序
需要注意,因为示教过程中KUKA.Sim Pro 3.1.2软件3D世界的世界坐标系方向足以满足工业机器人线性运动与旋转运动的手动操作要求,所以该程序所用的工具数据为Tool[0],即该程序中的线性运动和点到点运动都是以工业机器人第六轴法兰盘中心点为TCP进行的。
4 运动指令与工具坐标系应用的教学实施
编程实现以下功能:利用安装在工业机器人KR 6 R900 sixx第六轴法兰盘上的夹爪Gripper-Training,将笔Pen_1从弹仓Magazine中取出,在3d工作台Table_with_shape.3ds上绘制圆形轨迹,将笔Pen_1放回弹仓Magazine。画圆程序执行效果如图5所示。
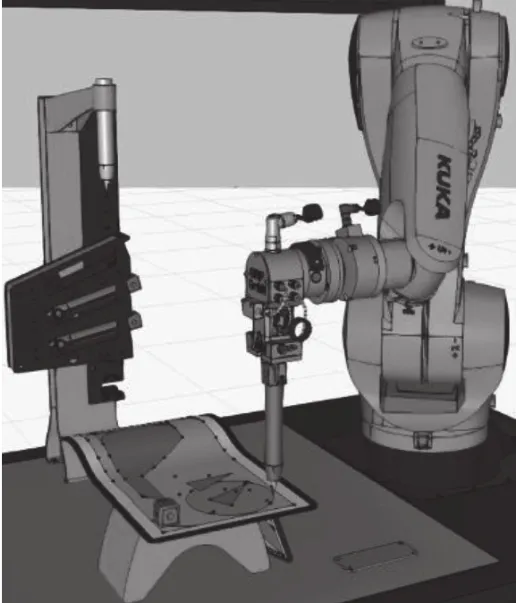
图5 画圆
由于笔Pen_1在弹仓Magazine中是倾斜放置的,在抓取和放置笔Pen_1的过程中,工业机器人若仍然参照世界坐标系运动,会造成操作的不便,所以需要参照夹爪Gripper-Training的工具坐标系TOOL[1]操作机器人。
在 KUKA.Sim Pro 3.1.2 软件中编程过程如下。
1)创建抓取笔Pen_1子程序Take_ Pen1:添加OUT指令将夹爪松开,添加WAIT指令延时0.5s。参照工具坐标系TOOL[1],利用旋转运动和线性运动将工业机器人移动至合适的过渡点,添加PTP指令,该过渡点设置为P7。参照工具坐标系TOOL[1],利用线性运动将工业机器人移动至笔Pen_1的抓取点,添加LIN指令,该抓取点设置为P8。添加OUT指令将夹爪加紧,添加WAIT指令延时0.5s。复制过渡点P7处的PTP指令,将PTP转化为LIN,该点设置为P9。
2)以笔Pen_1的笔尖为TCP创建工具数据TOOL_DATA[2]。创建子程序:参照工具坐标系TOOL[2],利用“捕捉”将笔Pen_1的笔尖移至圆周的起始点,利用旋转运动调整笔Pen_1的姿态,使笔Pen_1的中轴线与圆周所在的平面垂直,添加LIN指令,圆周的起始点设置为P11。将笔Pen_1的笔尖向上提起适当的距离,添加PTP指令,该过渡点设置为P10,把该PTP指令拖动至以P11为目标点的LIN指令之前。参照工具坐标系TOOL[2],利用“捕捉”将笔Pen_1的笔尖移至第一段圆弧的辅助点,添加CIRC指令,该辅助点设置为C1,利用“捕捉”将笔Pen_1的笔尖移至第一段圆弧的端点,该端点设置为C2。参照工具坐标系TOOL[2],利用“捕捉”将笔Pen_1的笔尖移至第二段圆弧的辅助点,该辅助点设置为C3,将笔Pen_1的笔尖移至P11,将此点设置为第二段圆弧的端点C4,即整个圆周的端点。复制过渡点P10处的PTP指令,将PTP转化为LIN,该点设置为P12。将该子程序命名为Draw_Circle。
3)复制抓取笔Pen_1子程序Take_ Pen1,将子程序名称改为Drop_Pen1,作为放置笔Pen_1的子程序。将夹爪的动作由加紧改为松开。子程序的最后添加PTPHome指令。
4)在主程序中调用抓取笔Pen_1子程序Take_ Pen1、画圆子程序Draw_Circle和放置笔Pen_1子程序Drop_Pen1。
需要注意,抓取笔Pen_1子程序Take_ Pen1和放置笔Pen_1子程序Drop_Pen1中,运动指令参照的工具坐标系是TOOL[1];画圆子程序Draw_Circle中,运动指令参照的工具坐标系是TOOL[2]。
5 利用虚拟示教器创建工具坐标系的教学实施
现实世界中在没有工具数据的情况下,需要通过测量创建工具坐标系。这里利用KUKA.OfficeLite软件提供的虚拟示教器,模拟实际现场创建夹爪工具坐标系的操作。
在 KUKA.Sim Pro 3.1.2 软件的 3D 世界中导入笔Pen_1,利用“对齐”将笔Pen_1 #2放在3d工作台Table_with_shape.3ds的适当位置,利用笔Pen_1 #2的尖点作为参考点创建夹爪的工具数据。
利用KUKA.OfficeLite软件提供的虚拟示教器,采用XYZ4点法和ABC2点法,创建夹爪工具坐标系的过程如下。
1)连接VRC实例,在虚拟示教器上选择T1手动慢速运行方式,用户组选择“专家”,在主菜单中选择:投入运行工具/基坐标管理,在“工具/基坐标管理”界面选择“工具工件”,点击“添加”按钮,创建编号为1,名称为tool1的工具坐标。
2)在“转换”窗口,点击“测量”按钮,选择“XYZ4点法”,手动操作工业机器人KR 6 R900 sixx,使待测定的夹爪TCP对齐参考点,点击“Touch-Up”按钮,获得测量点1,如图6所示。手动操作工业机器人KR 6 R900 sixx,使待测定的夹爪TCP以另外三种姿态对齐参考点,依此获得测量点2、测量点3和测量点4,如图7、图8和图9所示。XYZ4点法的测量结果如图10所示。若测量误差符合要求,则点击“保存”按钮,获得夹爪TCP。
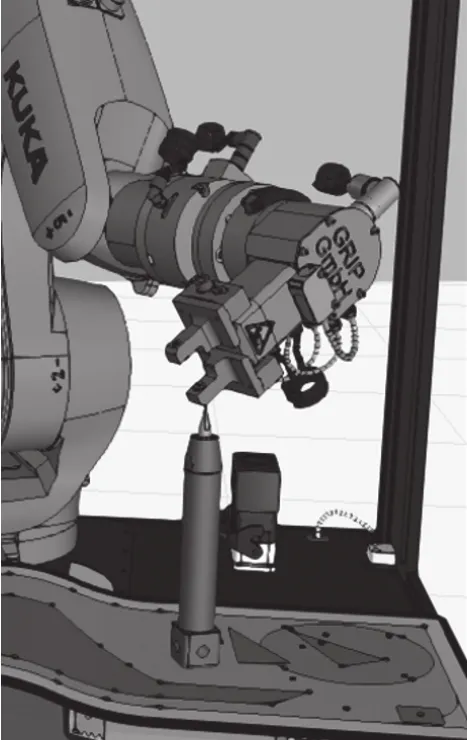
图6 测量点1
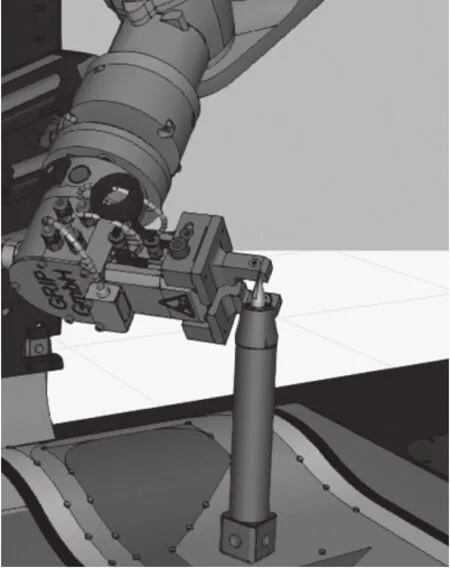
图7 测量点 2
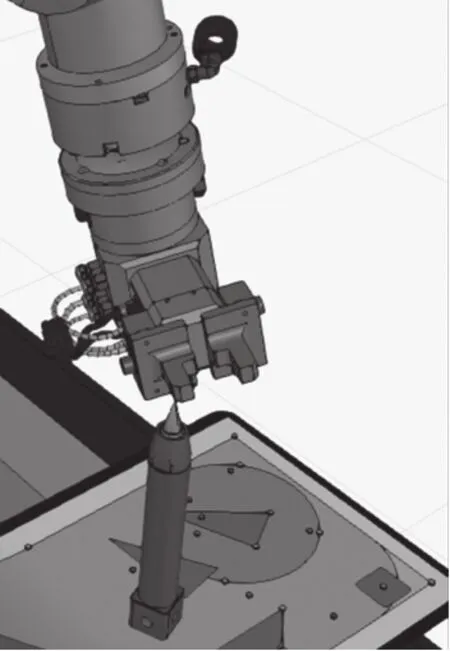
图8 测量点3
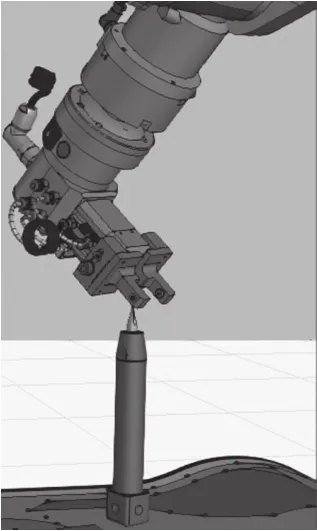
图9 测量点4

图10 XYZ4点法的测量结果
3)在“转换”窗口,点击“测量”按钮,选择“ABC2点法”,手动操作工业机器人KR 6 R900 sixx,使得TCP对齐参考点,点击“Touch-Up”按钮,记录TCP;手动操作工业机器人KR 6 R900 sixx,使待测定的工具坐标系X轴负方向上的一点对齐参考点,如图11所示,点击“Touch-Up”按钮,确定工具坐标系X轴的方向;手动操作工业机器人KR 6 R900 sixx,使待测定的工具坐标系Y轴正方向上的一点对齐参考点,如图12所示,点击“Touch-Up”按钮,确定工具坐标系Y轴的方向。ABC2点法的测量结果如图13所示。点击“保存”按钮,获得夹爪工具坐标系各坐标轴的方向。
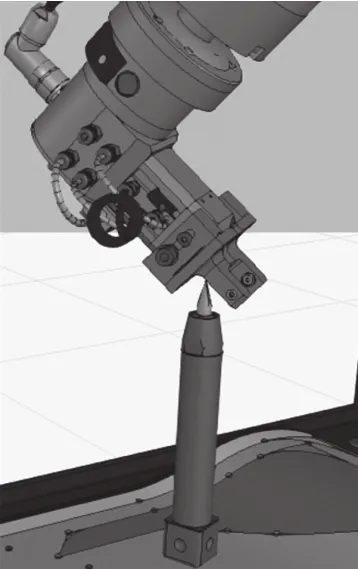
图11 工具坐标系X轴
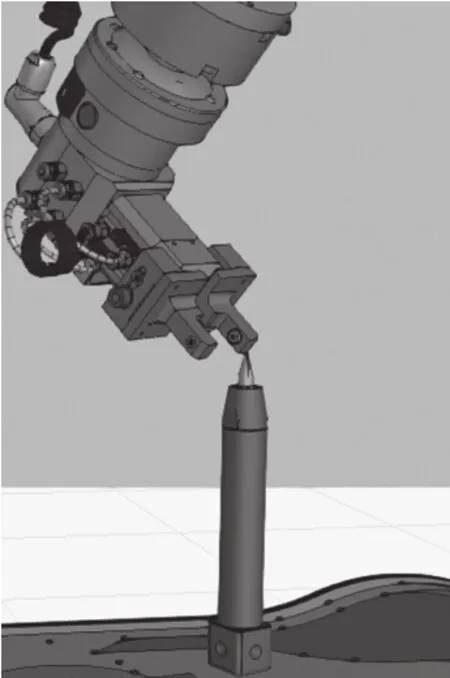
图12 工具坐标系XY层面

图13 ABC2点法的测量结果
4)XYZ4点法和ABC2点法操作完成后,可以将测得的TCP对齐参考点,参照测得的夹爪工具坐标系,手动操作工业机器人做旋转运动,测试TCP的准确性;手动操作工业机器人做线性运动,测试工具坐标系各坐标轴的方向。
6 结论
将 KUKA.Sim Pro 和 KUKA.OfficeLite 软 件相结合,应用于KUKA工业机器人操作与编程的前期教学,既可以解决由于设备数量限制影响教学效率的问题,又可以保障人身安全,降低设备故障率。本文只涉及了部分指令和工具坐标系创建与使用的教学,其它诸如KUKA示教器基本操作、基坐标的创建与使用、模拟现场示教编程等问题都可通过该方法实现教学。
