无监督对抗迁移学习轴承故障诊断*
2022-04-26袁海飞尹洪申
袁海飞,尹洪申,俞 啸
(1.徐州徐工挖掘机械有限公司,徐州 221008;2.中国矿业大学物联网(感知矿山)研究中心,徐州 221008;3.中国矿业大学信息与控制工程学院,徐州 221116)
0 引言
滚动轴承作为旋转机械的重要部件之一,常常受到各种环境因素的干扰,极易发生故障[1]。滚动轴承一旦发生故障,轻则会影响机械设备的工作效率,重则导致人员伤亡[2-3],因此需要确保轴承在机械设备中的健康运行。
传统的轴承诊断通常是针对轴承的振动信号进行分析,经验模态分解(empirical mode decomposition,EMD)将非平稳、非线性的振动信号分解成不同频率的本征模态函数(intrinsic mode function,IMF),在故障诊断中受到了广泛的应用[4-5],但EMD分解存在端点效应和模态混叠等问题。针对模态混叠等问题,WU等[6]提出了EEMD,在振动信号中加入高斯白噪声来解决IMF不连续引起的模态混叠。唐静等[7]将采集到的信号通过EEMD分解,提取信号的能量特征和时域特征构造故障特征向量进行诊断。虽然传统的轴承故障诊断方法在某些特定情况下取得不错的效果,但这些方法使用时都需要大量的先验知识和经验,因此在变工况中很难对复杂故障建立有效诊断模型。
近年来,随着深度学习的快速发展,越来越多的深度学习方法被应用到轴承故障诊断领域[8],迁移学习作为深度学习的分支,能够将学习到的知识迁移到不同的任务中[9],进行知识泛化,实现跨领域的识别。邵海东等[10]通过源域训练得到性能良好的深度模型,将模型迁移到目标域中,并通过目标域少量的训练样本微调模型,减小源域与目标域之间损失函数。但这种方法对源域模型要求较高,对不同的轴承数据集不具有普适性;YANG等[11]计算每个卷积层输出的距离并将其集成到目标函数中进行优化,以进一步扩展 MMD 在缩小不同域之间的距离方面的作用,但是核函数的选择对于MMD的度量距离至关重要,每个内核的参数选择都会影响最终映射效果;张根保等[12]通过源域训练提取域迁移参数,然后将源域和目标域同时训练,提取共同特征,引入高阶KL散度训练网络域自适应能力,但这种方法采用参数迁移会弱化源域与目标域之间的共同特征。
以上研究忽略了轴承不同尺度的特征信息和无法准确对齐两域之间的分布,针对轴承特征信息提取不全面,首先通过一层大卷积核提取轴承信号的故障特征,再结合大小不同的卷积核增强故障特征提取的范围;针对两域之间分布对齐问题,通过域对抗模块对齐源域与目标域之间的分布。基于此提出一种无监督对抗迁移学习轴承故障诊断方法,通过实验验证,结果表明模型在不同工况的轴承数据集中都实现较高的诊断准确率。
1 迁移学习
1.1 迁移学习介绍
迁移学习作为深度学习的一个分支,受到了各个研究领域的广泛关注,并且在视觉语义方向获得了巨大成功。迁移学习一般由源域和目标域共同组成。源域一般用Ds表示,源域由源域数据Xs和源域标签Ys组成,目标域一般用Dt表示,目标域一般只含有目标域数据Xt。实际场景中的源域和目标域数据所处的工作环境不同,因此源域和目标域之间的分布往往不同,导致传统的深度学习网络分类准确率低下。迁移学习的核心思想是希望将源域与目标域映射到同一特征空间,然后寻找源域和目标域之间分布的特征相似性,最后通过衡量源域和目标域之间分布的差异,完成两域之间的特征迁移。因此迁移学习的重点是如何减小源域与目标域之间的分布差异。
1.2 域对抗学习
GANIND等[13]提出了域对抗神经网络(domain-adversarial training of neural networks,DANN),域对抗神经网络的思想与生成式对抗网络(generative adversarial networks,GAN)非常相似。DANN由3块网络组成如图1所示,包括:特征提取器、分类器和域判别器。特征提取器的作用是提取源域和目标域的特征;分类器的作用是完成特征提取器中源域特征的分类;域判别器的作用是尽可能的分类出特征提取器输出的源域和目标域的数据。
DANN的最终目的是希望从特征提取器输入的源域特征和目标域特征混淆域判别器,最终使其无法分清特征提取器输入源域数据和目标域数据。通过这种方式将源域和目标域映射到同一特征空间,对齐两域之间的分布,然后通过分类器完成目标域数据的分类。其中,特征提取器和分类器组成前馈神经网络,最小化标签类别损失,使得分类器尽可能的准确预测标签;而对于域判别器希望最大化分类损失已达到特征提取器输入的源域特征和目标域特征混淆域判别器的目的。为了保证整体的损失函数最小化,在分类器和域判别器之间加入了一个梯度反转层,在前向传播时保持不变,在反向传播时自动取反,这样就保证了保证整体的损失函数最小。
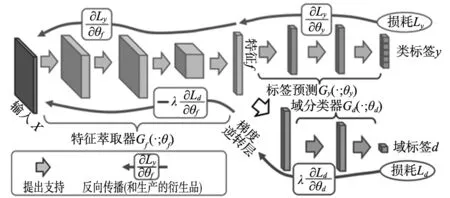
图1 DANN网络模型图
2 无监督对抗迁移学习网络模型
2.1 改进的WDCNN算法
虽然许多方法可以在故障诊断中取得良好的效果,但很少有直接处理原始时间信号的方法,ZHANG等[14]提出了一种针对原始轴承信号的故障诊断方法(WDCNN),通过一层大卷积核和几个相同的小卷积核提取轴承故障特征,但相同卷积核无法兼顾多个尺度的轴承故障信息,基于此提出了一种多尺度的WDCNN网络特征提取模型(MSWDCNN),MSWDCNN算法首先通过一层64×1的大卷积核自动提取轴承故障诊断特征,剔除冗余故障信息,消除特征干扰和抑制高频噪声,然后将WDCNN中剩余的卷积核改为3×1、3×1、5×1、5×1的卷积核,目的是更加全面地获取源域和目标域之间不同尺度的细粒化故障特征,使得特征提取器与域判别器更激烈的对抗,更好地混淆域判别器,同时也能够让分类器更准确地完成故障分类。MSWDCNN网络结构参数如图2所示。
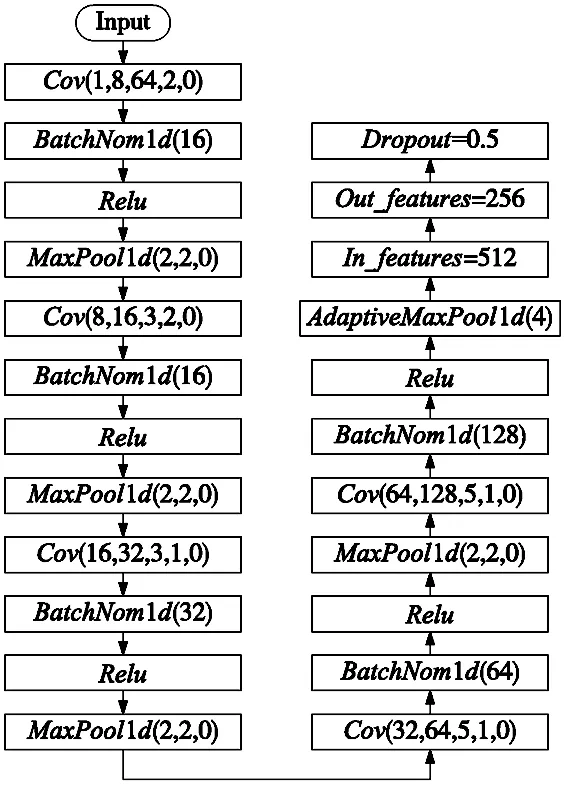
图2 MSWDCNN网络结构参数图
2.2 无监督对抗迁移学习网络结构

(1)
式中,Gy(·)表示RD→[0,1]L的映射函数。
LDANN损失包括两部分,一部分是改进的WDCNN特征提取网络,一部分是域判别器,在反向传播过程中,域判别器由梯度翻转层取反,LDANN定义如下:

(2)
式中,di代表第i标签来自于源域还是目标域。因此总的损失函数L可表达为:
L=Lc-λLDANN
(3)
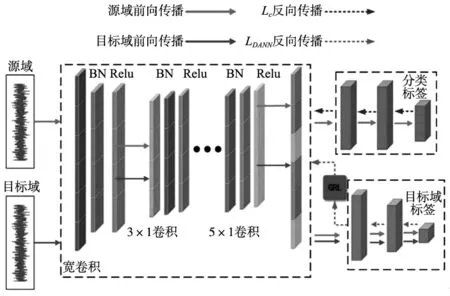
图3 MSWDCNN-DA网络结构图
2.3 故障诊断步骤
滚动轴承在不同工况和不同负载下的内圈、外圈、滚动体之间的相互迁移故障诊断具体流程如下:
(1)数据预处理。源域和目标域中振动信号直接送入特征提取网络中,每个信号样本采样点为1024,不重叠采样,轴承数据进行归一化处理,其中目标域数据集包括训练样本集和实测样本集。
(2)对抗域迁移模型训练。轴承振动信号送入源域与目标域数据集中,直接输入到MSWDCNN网络模型中进行训练。第一层宽卷积核很好的提取了轴承信号中的故障特征,为了保证充分提取的轴承信号的特征,利用大小不一的卷积核获取不同尺度的故障特征。模型训练过程中源域数据与目标域数据参数共享,源域故障特征经过特征提取网络送入分类器网络中,经过Softmax函数完成轴承故障分类;源域特征与目标域特征通过特征提取网络参数共享后送入域对抗网络,首先经过梯度翻转层,接着经过三层全连接层,判断数据是来自于源域还是目标域,假设源域为1,目标域为0,打上标签。最后通过最大化分类器预测正确率和最小化域判别器分类正确率,反向传播MSWDCNN特征提取网络,更新模型参数,当模型参数达到最终迭代要求,将目标域样本送入特征提取网络,经分类网络完成轴承故障分类。模型优化器选用Adam,初始学习率设为0.001,实验用电脑系统为Window 10,显卡为GeForce RTX 3060和16G RAM。
3 实验结果分析
3.1 实验数据集
采用某大学CWRU的轴承故障诊断数据集和JNU故障诊断数据集。CWRU数据集包括采样频率为12 kHz驱动端和风扇端、采样频率为48 kHz驱动端的轴承故障数据,JNU数据集包括转速为600、800、1000 rpm的内圈、外圈、滚动体、正常的轴承数据集。不同工况迁移情况在3.2节和3.3节详细介绍。
3.2 CWRU数据集实验诊断
CWRU数据集中有内圈、外圈、滚动体3种损伤,损伤直径为0.007、0.014、0.021 in,共计9种故障,还包括一种正常状态的轴承。类型标记描述如表1所示。
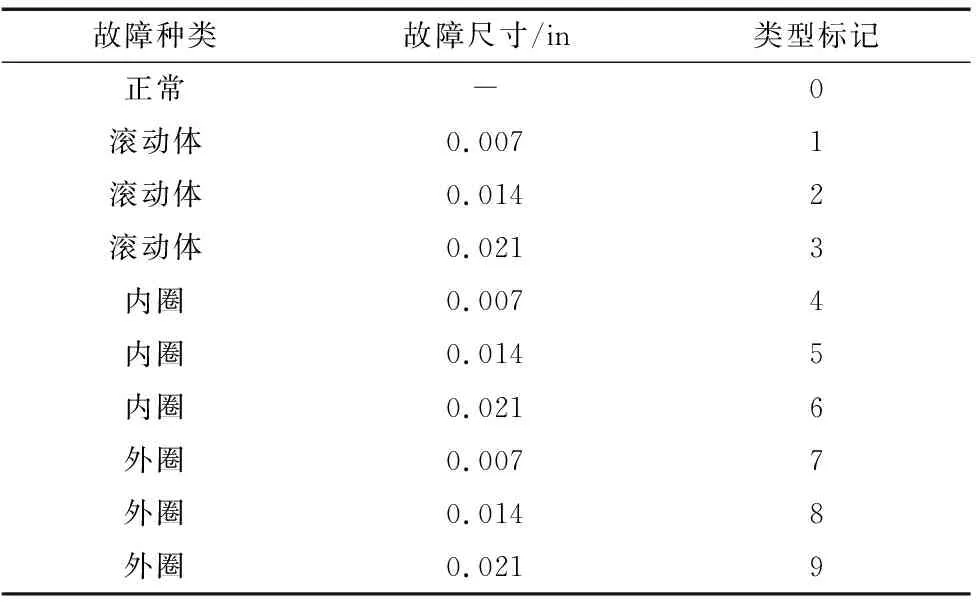
表1 类型标记描述
如表2所示,CWRU数据集中4种不同运行速度对应4种不同电机负载组成的4种马力,分别为0、1、2、3 hp。4种马力相互迁移,共有12个迁移设置。

表2 迁移学习任务
本次无监督对抗迁移学习轴承故障诊断选用CWRU轴承数据集中的12 kHz驱动端数据。训练bitchsize为64,迭代次数为300。实验结果如表3所示,CWRU平均准确率为98.53%,但各个工况迁移准确率不稳定,从对抗迁移实验结果可以得出1-0、2-0、3-0迁移结果最差,可见低转速的轴承数据迁移到高转速的轴承数据会对故障诊断准确率造成一定的影响。
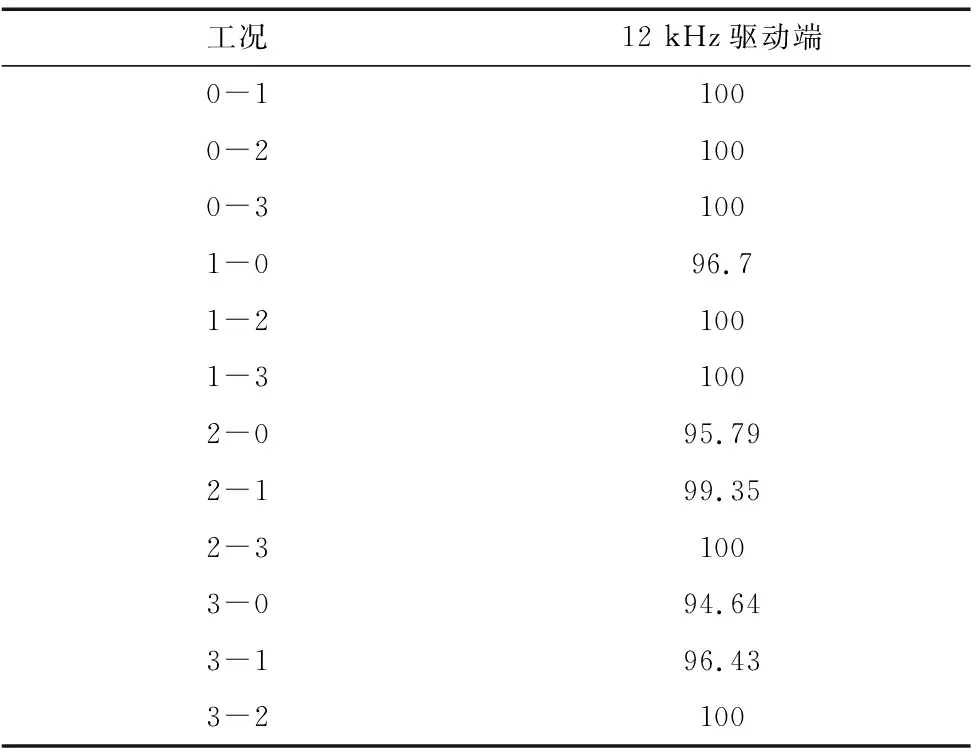
表3 迁移实验结果 (%)
为了更加清楚地分析1-0、2-0、3-0之间迁移故障分类准确率,通过混淆矩阵进行分析,详细分析了不同标签的分类情况,分类结果如图4所示。从图中可知,1-0工况在标签8上分类效果最差,只有83%,被错分到0标签上最多有16%;其次是标签2只有88%,被错分到0标签上也是最多有12%。2-0工况也是在标签8上分类效果最差,只有82%,被错分到0标签上最多有12%,其次是标签5准确率只有89%,被错分到标签8上最多,有6%。3-0工况在标签3和标签5分类效果最差,只有75%和79%,而其大部分被错分到0标签上。因此不难得出,故障分类被错分到0标签概率最大。
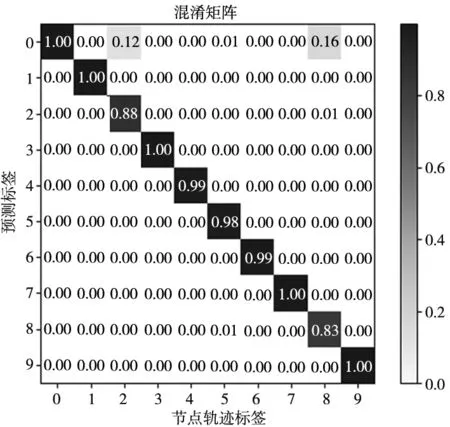
(a) 1-0工况迁移
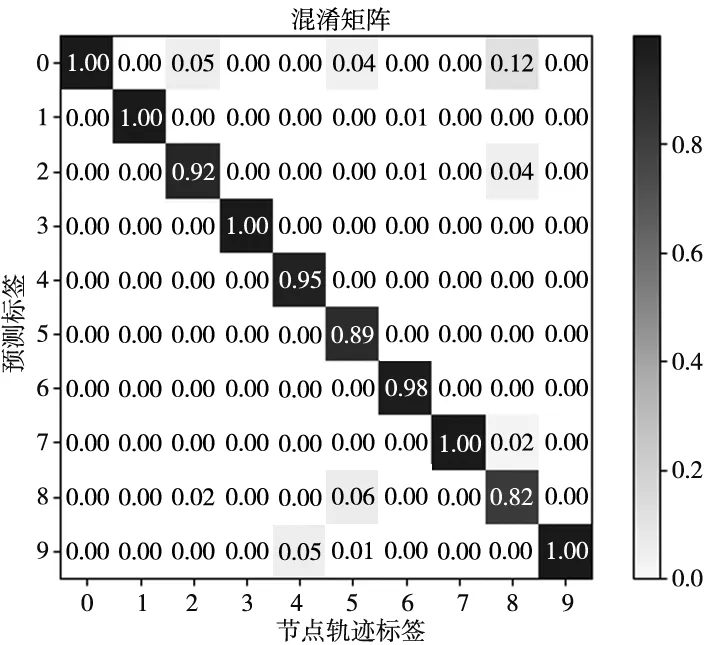
(b) 2-0工况迁移
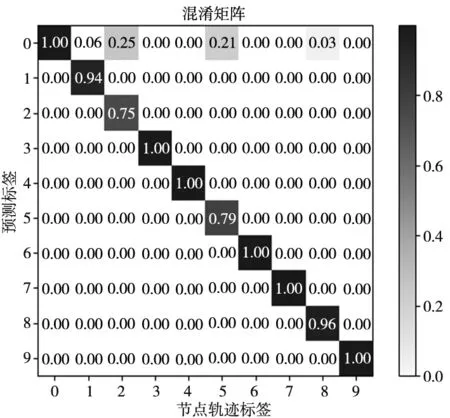
(c) 3-0工况迁移图4 CWRU混淆矩阵
3.3 JNU数据集实验诊断
JNU数据集在50 kHz采样频率下分为600、800、1000 rpm三种转速。每种转速包含内圈、外圈、滚动体、健康轴承4种标签,类型标记如表4所示。
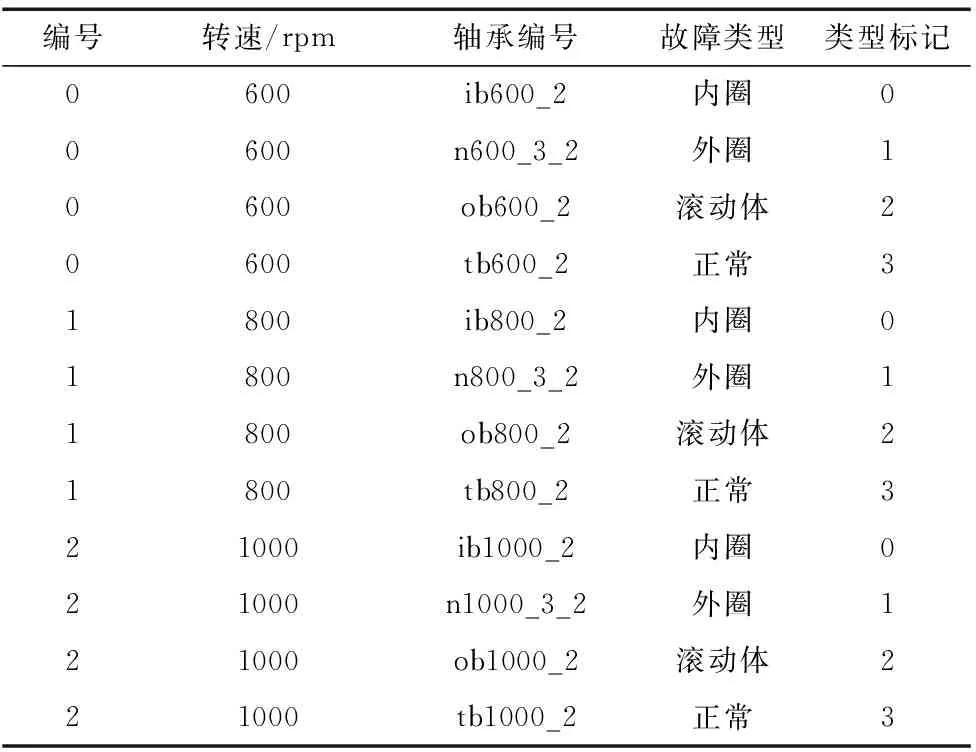
表4 类型标记描述
如表5所示,JNU数据集按照不同转速进行相互迁移,共有6种迁移设置。

表5 迁移学习任务
为了证明本方法的有效性,与3种方法进行比较,第1种,不加域判别器,记为BASELINE[14],第2种,在对抗迁移中加入全连接域判别器,记为AD+FC[15],第3种,将域判别器中的全连接层改为卷积层,记为AD+CNN[16]。对比结果如表6和图5所示。
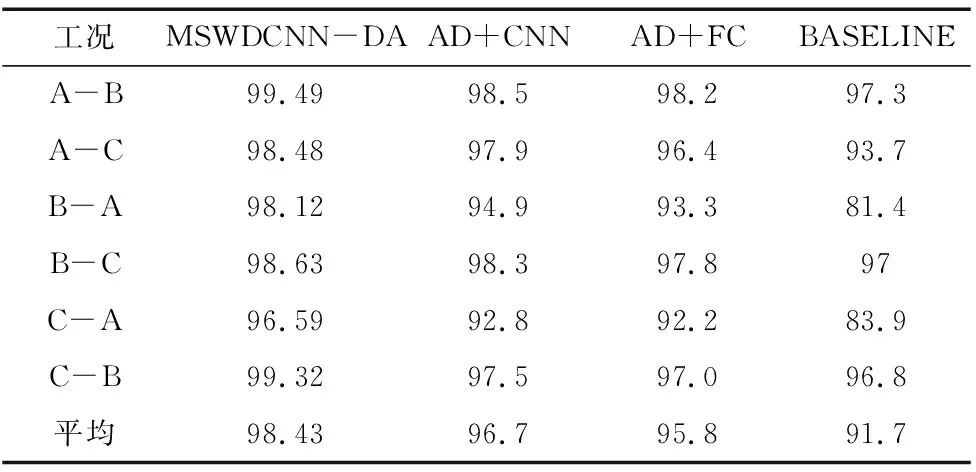
表6 各种故障模型对比分类结果 (%)
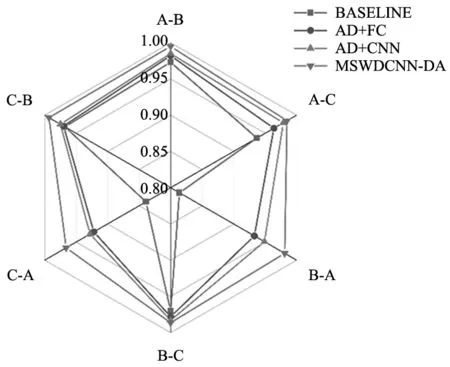
图5 各种故障模型雷达图对比分类结果
可以得出MSWDCNN-DA网络在各个工况迁移分类准确率都优于其他三种方法,平均准确率高达98.43%,相比于其他方法有不小的提升。因此可以得出不同的卷积核能够更有效的提取轴承故障特征,同时可以得出特征提取网络的改进要优于域判别器网络的改进。
4 结束语
针对轴承故障诊断中存在标签缺失、变工况准确率低下、诊断模型泛化能力弱等问题,提出了无监督对抗迁移学习轴承故障诊断方法。在CWRU轴承故障诊断数据集和JNU轴承数据集上进行了验证,得到了以下结论:
(1)无监督深度迁移学习轴承故障诊断模型在不同的轴承数据集中都取得较高的准确率,证明该模型具有良好的泛化能力。
(2)通过在JNU轴承数据集的实验,特征提取网络的改进要优于域判别器网络的改进。
(3)通过无监督深度迁移学习轴承故障诊断模型在CWRU轴承数据集中的实验可以得出,低转速的轴承数据迁移到高转速的轴承数据会对故障诊断准确率造成一定的影响。
