基于扰动观测器的PMSM滑模控制*
2022-04-26谭光兴苏荣键岑满伟
谭光兴,苏荣键,岑满伟
(广西科技大学电气与信息工程学院,柳州 545616)
0 引言
永磁同步电机之所以被广泛运用在交流伺服系统中,是因为其结构简便,转速性能好,运行稳定,输出转矩能力强等特点。目前,比例积分微分(proportion integral derivative,PID)控制被普遍用于永磁同步电机的调速系统中,因该算法易实现,参数调整方便等优点。然而,控制变量多,耦合强,非线性,变参数的PMSM;当系统受到外部干扰及电机参数变化时会存在鲁棒性差及抖振过大,传统滑模控制及PID算法是很难实现理想的高性能控制要求的[1-2]。
近几年,许多学者为了解决传统PI控制在PMSM高性能控制领域的不足,将模糊控制、自抗扰控制、滑模控制、模型预测控制等控制策略结合来增强PMSM调速系统的抗干扰性能及动态性能[3-5]。其中,将滑模控制成功运用到电机调速系统中,增强了鲁棒性,提高了响应速度[6-7]。为了实现系统的无超调,响应速度快和增强鲁棒性,引用了一种新型趋近率滑模控制方法与传统的趋近率相比有了更好的效果[8]。段方宾等[9]以动态误差为性能指标设计积分性能最优的滑模控制,并采用最优切换函数,提高了系统的鲁棒性。淡宁等[10]运用了快速扭曲算法与扰动观测器复合控制,抑制了滑模的抖振。李政等[11]设计的调速控制器是采用了积分型滑模变结构并结合负载转矩观测器,有效提高了系统的调速性能。ZHANG等[12]以改进滑模指数趋近律和扰动观测器相结合补偿电机参数扰动所引起的参考电压变化,增强了系统的参数鲁棒性。QUAN等[13]在调速系统的速度环中引入了加强自适应滑模控制器,调速性能有了全面的提升,但难以实现。侯利民等[14]采用自抗扰控制结构与滑模控制相结合的方法,对所设计的扩张状态观测器和非线性误差反馈控制律进行优化。祝新阳等[15]设计了全阶滑模观测器省去了低通滤波器,并选取Sigmoid函数作为切换函数抑制系统的抖振,同时引入模糊控制,提高了系统的鲁棒性。为了解决参数变化等问题,曹晓月等[16]改进了辨识定子电阻的观测器对系统的精度和削弱抖振有一定的作用。面对转速的估计精度低及抖动大等问题,白天宇等[17]采用了滑模观测器,并设计新的切换函数,有效的消除高频谐波。
基于上述研究,通过设计新型趋近率,为了提高调速系统的动态响应,并抑制抖振,在传统的指数趋近率加入转速误差绝对值。其次,设计扩张状态观测器ESO(extended state observer) 观测电机参数变化及负载转矩变化的扰动,并将观测的扰动值作为前馈补偿引入滑模控制器中,以增强系统的抗干扰能力。仿真实验结果,该方法有效提高了PMSM调速系统的鲁棒性和动态性能。
1 永磁同步电机数学模型
在忽略电机参数变化及外部扰动的条件下建立永磁同步电机的数学模型,可得电压方程如下:
(1)
式中,ud、id、Ld为d轴上的电压、电流、电感;uq、iq、Lq为q轴上的电压、电流、电感;R为定子绕组电阻;ωm为电角速度;ψf为磁链;p为极对数。
又因为表面式永磁同步电机有Ld=Lq,Te为目标转矩,则转矩方程如下:
(2)
其中PMSM运动方程如下:
(3)
式中,B为粘性摩擦系数;J为转动惯量;TL为负载转矩。
考虑系统参数及转矩变化得:

(4)
式中,Δα1、Δα2、Δα3表示电机的参数变化值;β表示负载转矩及参数带来的扰动值。
(5)
2 控制器的设计
2.1 滑模控制器设计
综上所述,取PMSM状态变量为:
(6)
式中,ωref为目标转速;ωm为电机输出转速。结合式(5),并对式(6)求导得:
(7)
定义系统滑模面函数为:
s=cx1+x2
(8)
对滑模面函数求导,并将式(6)代入得:
(9)
在电机实际控制时,滑模控制方法存在高频抖振问题,则需要选取合适的指数趋近率可以有效的减弱滑模抖振。因此,为了提高系统的性能,将引入改进的新型趋近率,其改进的趋近率为:
(10)
式中,ε、k表示常数,且ε>0,k>0;-ε|x1|sgn(s)为等速趋近项;ks为指数趋近项。当误差增大时,等速趋近项使系统状态变量接近滑模面;同时,指数趋近项使系统状态变量减少至0。

(11)
选取Lyapunov函数:
(12)
(13)


(14)
2.2 扩张观测器设计
根据式(11),利用滑模面设计出来的控制率含有电机参数变化及负载转矩扰动项β,而扰动值无法测量,因此本文设计扰动观测器进行估计。
在实际的电机调速系统中,PMSM系统参数扰动变化缓慢,扰动的一阶导数可近似0,则由式(4)建立系统状态空间方程可得:
(15)
以ωm、β为观测对象,建立转速估计误差e1的增益反馈。由式(15)的基础上设计扩张扰动观测器为:
(16)

由式(15)和式(16)得扩张观测器的误差方程如下:
(17)

因此,可将扩张观测器的误差状态方程表示为:
(18)
(19)
从式(19)看出,以参数变化及负载的扰动作为前馈补偿,当负载及电机参数发生变化时,控制器能克服负载及参数扰动对系统的影响,有效的抑制系统的抖振现象,同时引入饱和函数,进一步的提高系统的鲁棒性。
3 仿真验证
3.1 仿真模型
为了验证本文提出的滑模控制与扰动观测器结合的可行性,搭建PMSM的矢量控制(field-oriented control)系统,为了快速响应速度环的持续输出设计了滑模电流控制器,并对所设计的速度控制器及观测器进行验证和分析。实验所用的PMSM的参数如表1所示,系统框图如图1所示。

表1 PMSM参数

续表
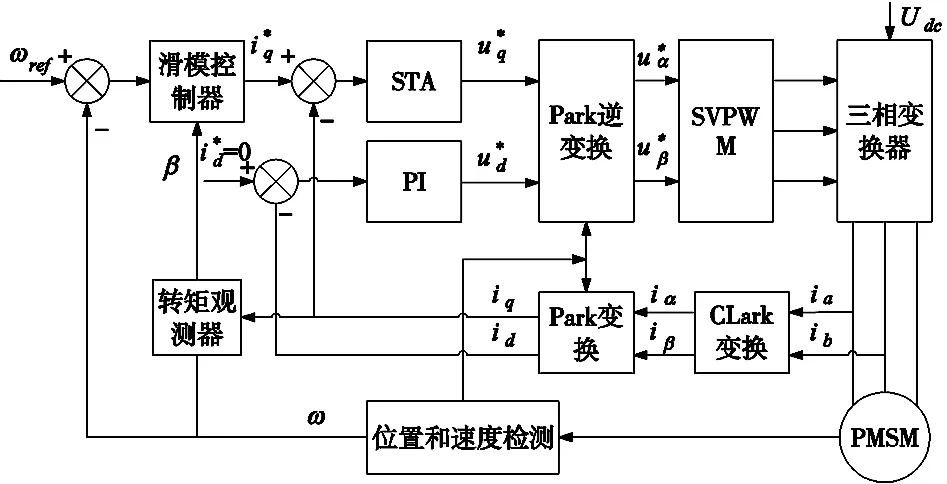
图1 PMSM调速系统控制框图
本文所设计的滑模控制器及扩张观测器参数配置为c=800,ε=250,k=400,λ1=15,λ2=9,η=0.000 5。其中最优滑模参数配置为c=10,ε=200,k=300;PI参数配置为kp=0.14,ki=7;传统滑模参数配置为c=30,ε=200,k=300。
3.2 仿真结果分析
设定目标转速为1000 r/min,直流侧电压为311 V,初始负载为1 N·m。图2表示在0.4 s突加10 N·m的负载时系统在本文的控制算法、最优滑模、PI及传统滑模的速度响应曲线。

(a) 系统响应 (b) 起动对比
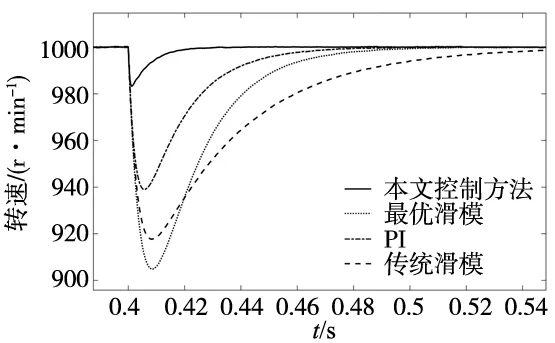
(c) 突加负载转速变化曲线图2 转速变化曲线
表2和表3显示控制方法的动态性能及抗干扰能力。

表2 动态性能对比

表3 抗干扰性能对比
由图2、表2及表3可知,所提出的积分变结构与扰动观测器复合的滑模控制方法在改善调速系统的动态性能及抗干扰性能优于传统的控制方法。该方法能够使系统实现无超调,响应速度快,调节时间短,且抗干扰能力强。
为了验证设计的扩张滑模观测器对系统有较好的鲁棒性,在0.4 s时转矩突加10 N·m,0.6 s将10 N·m的转矩卸掉。其中,图3显示了扩张观测器对突加及突卸负载时转矩变化实时估计。图4显示了扩张观测器对转速的跟随。
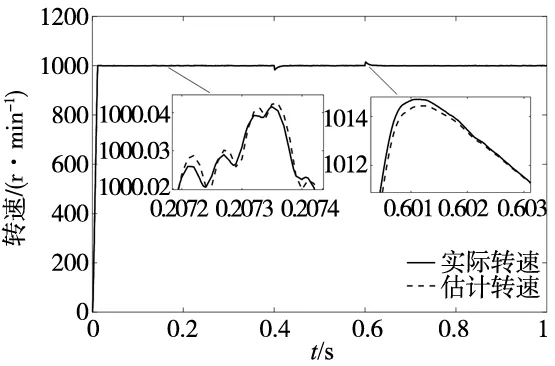
图4 转速实际值与观测值
常规的滑模控制、传统的PI等控制方法在突加和突卸负载时,系统会产生较大的抖振。但从图3和图4可以看出,本文的控制方法所得的转速观测值与实际值存在的误差在-0.1~0.1 rpm之间;在转矩突变时,估计转矩能比实际转矩更平滑。因此,将扩张观测器观测到的估计电机参数变化及负载转矩的扰动值引入滑模控制器中能很好的削弱抖振;
为了验证所设计的观测器将观测的电机参数变化及负载转矩的扰动引入滑模控制器中作为前馈补偿,进一步减弱滑模控制抖振。如图5表示的是引入扩张观测器前馈补偿与没有观测器前馈补偿在突加负载及突卸负载时转速变化。
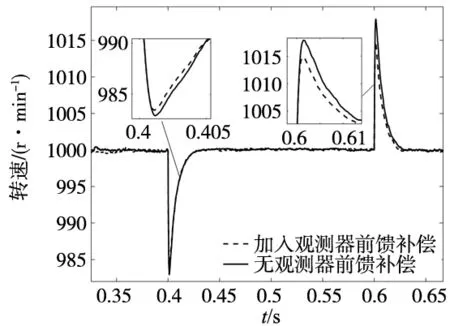
图5 引入观测器前馈补偿对比
表4列出本文设计的滑模控制方法在有无扩张观测器将观测值作为前馈补偿的抗干扰性能。

表4 有无观测器前馈补偿性能
由图5和表4可知,设计扩张观测器能观测到不可测量的电机参数变化及负载转矩的扰动作为前馈补偿对抑制滑模控制的抖振起到很好的作用;在突加及突卸负载转矩时,转速受到的扰动影响较小,且扰动调节时间短,显示出了较强的鲁棒性,能有效的抑制抖振。
4 结论
设计了积分变结构的滑模控制器,采用新型趋近率,并结合扩张滑模观测器将观测到的电机参数变化及负载转矩的扰动值作为前馈补偿,使调速系统响应速度快,无超调;在突加或突卸负载时,抖动小,调节时间短,有效抑制了滑模控制的抖振。
