直升机吊挂飞行中载荷摆动控制方法研究
2022-04-24张松马钊张辉
张松,马钊,张辉
(航空工业西安飞行自动控制研究所飞行控制系统部,西安710065)
0 引言
吊挂飞行是一种直升机运输货物的特殊飞行模式。由于其不受运载货物尺寸和起降地形限制的影响,广泛应用于军事行动、森林灭火、抗震救灾、医疗救护和电力设施架设等诸多军用和民用领域。统计数据表明,直升机飞行事故中与吊挂飞行相关的超过10%,其中飞行员操作失误是导致飞行事故的重要原因。当吊挂载重比(吊挂载荷与直升机重量比值)超过0.3 时视为大载荷,大载荷吊挂的存在会显著影响直升机的操纵性和稳定性,尤其是对于横向通道。飞行员对直升机的操纵会引起吊挂载荷摆动,从而导致直升机产生剩余振荡,飞行员处理不当极易出现飞行员诱发振荡(PIO)现象。
目前,国外关于直升机吊挂飞行的研究并没有针对大载荷吊挂进行分析。L.Lucassen 等最早对三自由度悬停的直升机吊挂系统进行了研究;R.A.Stuckey首次建立了完整的直升机吊挂飞行的动力学模型;L.S.Cicolani 等借助UH-60直升机,进行了各种不同吊挂物的飞行试验;M.Bisgaard 等针对小型无人直升机吊挂系统从建模、评估到控制进行了研究,但对直升机大载荷吊挂飞行参考意义有限。国内研究者对直升机吊挂飞行进行了不同维度的研究:曹义华等对吊挂系统建模、操稳特性和飞行品质进行了分析;陈元等着重研究直升机与吊挂的耦合机理,但都没有对有人直升机吊挂飞行控制方法进行针对性研究。
本文针对直升机吊挂飞行的姿态稳定性控制,提出一种面向工程应用的控制方法,在显模型跟随的控制架构上结合自适应控制和输入整形技术,对某型直升机的典型吊挂飞行状态进行仿真与分析。
1 直升机—吊挂系统模型
本文吊挂模型包括缆绳和吊挂载荷,载重比为0.33。结合工程应用实际,其中缆绳采用单挂点非柔性钢索模型,吊挂载荷采用质点模型,如图1 所示。
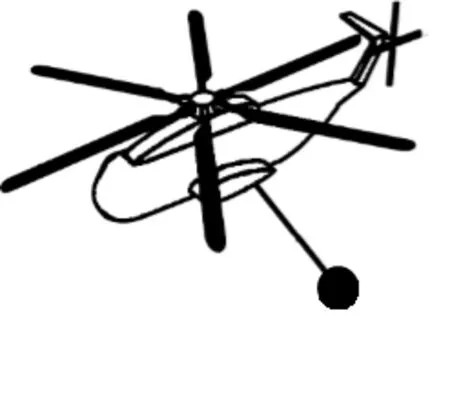
图1 直升机吊挂示意图Fig.1 Diagram of helicopter suspension
结合实际吊挂飞行任务情况,假设缆绳始终处于张紧状态,且忽略缆绳的变形。无论载荷的运动方式如何,最终都表现为缆绳与机身纵轴线的夹角变化,即缆位角和缆位角速率,分别记作:

吊挂物重心在相较直升机重心位置为
=+(2)
式中:为机身吊挂点的相对于直升机重心的位置;为载荷相对于吊挂点的位置。
吊挂飞行速度为

式中:为直升机的飞行速度。吊挂飞行阻力为

式中:为空气密度;为载荷迎风面积。综上,吊挂对直升机合力为

式中:m为吊挂物的质量。
吊挂作用在机体上的合力矩为
=×(7)
本文采用的直升机本体模型为6 自由度飞行动力学模型,综合吊挂模型,经过小扰动线性化,最终得到直升机—吊挂系统的状态空间方程:
式中:为状态量,是13×1 的列向量;为气动导数矩阵,是13×13 的矩阵;为操纵导数矩阵,是13×4 的矩阵。
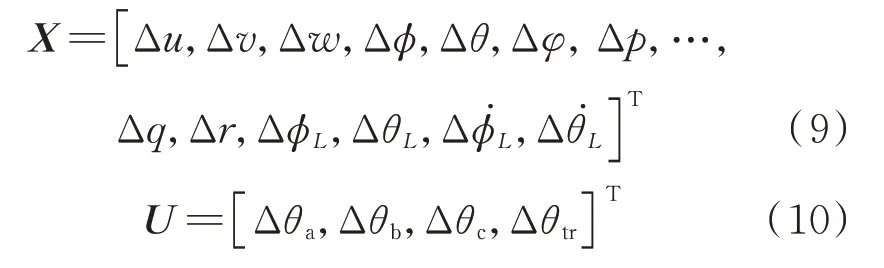
式中:,,分别为欧拉角表示的滚转角,俯仰角和航向角;,,分别为机体坐标系下的前向速度,侧向速度和天向速度;,,分别为机体坐标系下的滚转角速度,俯仰角速度和航向角速度。
4 个输入量为:横向周期变距角Δ,纵向周期变距角Δ,总距桨距角Δ,尾桨桨距角Δ。
2 显模型跟随自适应控制
2.1 显模型架构
显模型跟随控制可以强迫直升机跟踪指令模型,改变模型特性即可改变直升机的操纵特性,进而提高飞行操纵品质。
直升机典型的显模型跟随控制器的结构如图2 所示,其中为指令模型,为前馈环节,为反馈环节,为直升机吊挂模型。飞行员的驾驶杆指令通过指令模型输出期望的姿态,前馈环节通过逆模型环节消除不利的直升机响应,反馈环节则用于减小飞机响应与指令模型的跟踪误差。
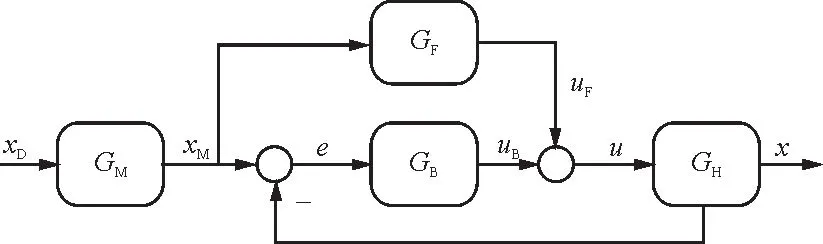
图2 直升机典型显模型跟随控制结构Fig.2 Typical explicit model following control structure
根据图2 可以得到:
=+=⋅+⋅(11)
姿态角跟踪误差=-,对于直升机而言,通常指令模型设计为二阶,以滚转通道为例,传递函数的表现形式为

式中:为期望的滚转角;为对应的横向周期杆输入;为模型带宽;为模型阻尼比;为灵敏系数,反映周期杆输入量对应期望姿态角的线性关系。
在本文中,设定=0.3,=3,=0.75。
逆模型由直升机六自由度方程推出,以滚转通道为例,结合工程应用实际忽略掉高阶项与耦合项,可以得到:
̇=L+L+L⋅(13)
式中:̇为滚转角速率;L,L,L为状态空间方程中阵的对应元素。
对式(13)进行拉普拉斯变换即可得到。
2.2 自适应模糊PID 控制器
经典的PID 由于其简单易于实现等优点在工程中得到了广泛应用,但其局限性也逐渐凸显。马钊等采用模型跟随控制与模糊控制相结合的方法对UH-60 直升机的纵向飞行控制律进行设计,使得飞行品质得到明显改善,但并没有针对吊挂飞行进行专门研究。本文结合模糊控制,设计的自适应控制器如图3 所示,PID 控制器初始参数如表1 所示。通过对输入进行模糊推理,得到比例增益、积分增益和微分增益三个控制参数的修正量,实现参数实时变化,从而达到自适应控制效果。
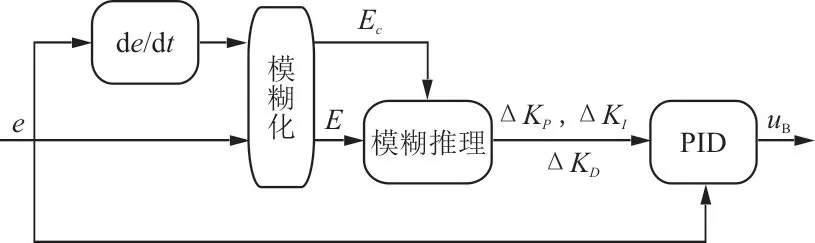
图3 自适应模糊PID 控制器结构Fig.3 Structure of adaptive fuzzy PID controller
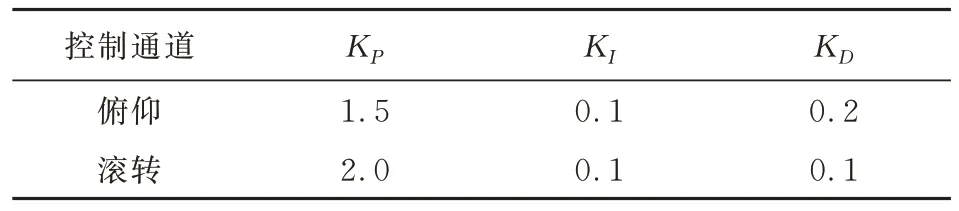
表1 PID 控制器初始参数Table 1 Initial parameters of PID controller
2.2.1 建立模糊化输入
以姿态角跟踪误差和其变化率作为输入,ΔK、ΔK、ΔK作为输出。模糊变量的符号定义为{NB,NM,NS,ZE,PS,PM,PB},分别表示“负大”“负中”“负小”“零”“正小”“正中”“正大”。根据直升机飞行状态的实际情况,姿态角跟踪误差的论域为[-30,30],其变化率的论域为[-10,10],输出量ΔK、ΔK、ΔK的论域为[-3,3]。输入量与输出量的隶属度函数分别选择“高斯型”和“三角形”,如图4~图5 所示。
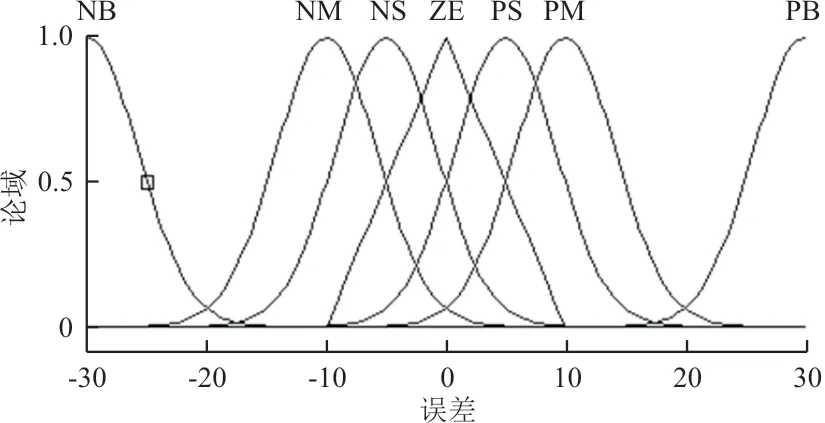
图4 输入量的隶属度函数Fig.4 Membership function of input
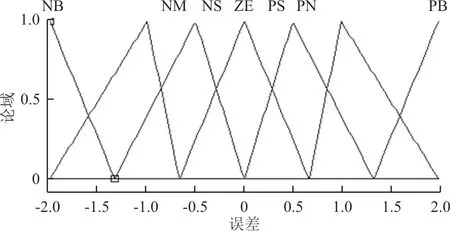
图5 输出量的隶属度函数Fig.5 Membership function of output
2.2.2 制定模糊控制规则
本文以减小直升机大载荷吊挂飞行的姿态角跟踪误差为目标,结合工程应用实际经验,建立模糊控制规则,如表2 所示。
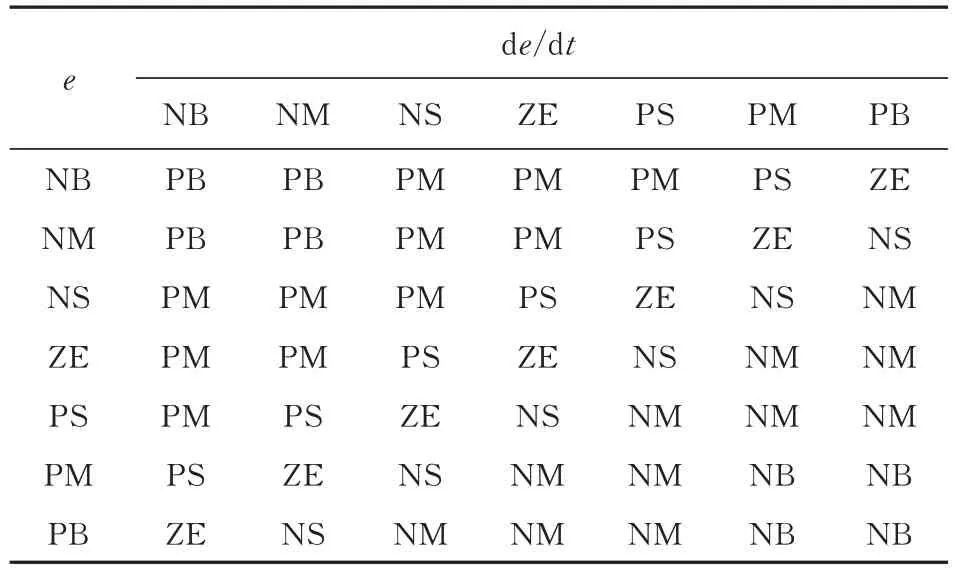
表2 模糊控制规则Table 2 Fuzzy control rules
2.2.3 制定模糊控制决策方法
模糊决策采用曼达尼(Mamdani)推理法,解模糊采用重心法,利用MATLAB 中的模糊(fuzzy)工具箱实现,在此不再赘述。
3 输入整形
当直升机进行吊挂飞行时,飞行品质会大打折扣,尤其在执行机动动作时。吊挂载荷的不良摆动会降低直升机对指令的跟踪控制效果,如何减小吊挂载荷的不良摆动是提高直升机吊挂飞行品质的关键措施。
在此,对飞行指令进行输入整形处理,如图6所示,其中为输入整形器,是经过整形的指令。
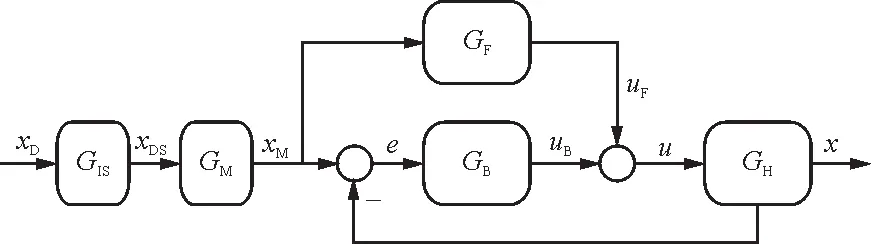
图6 增加输入整形器的直升机吊挂飞行控制系统Fig.6 Combined input-shaping for the helicopter suspension flight control system
输入整形是一种易于实现的控制方法,且得到广泛应用,以双脉冲输入整形器为例进行说明,如图7 所示,在时刻给一个A脉冲信号,在时间给一个A脉冲信号,两个脉冲信号各自引起的振动线性叠加抵消。对于一般的控制系统输入整形,即将输入信号与输入整形器的脉冲信号进行卷积运算,然后将卷积之后的信号作为新的系统输入,从而消除或减小系统的残余振动。
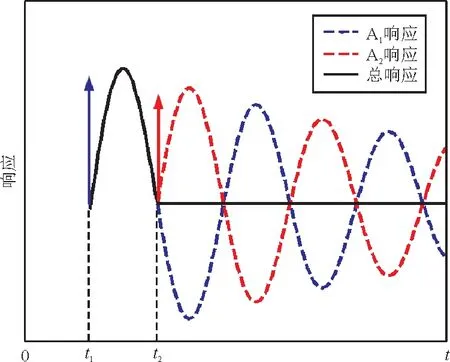
图7 双脉冲输入整形器原理Fig.7 The principle of double pulse input shaper
含有个脉冲函数的输入整形器的传递函数表示为

式中:为脉冲振幅;为脉冲的作用时间。
整个系统的残余振动(,)可以表示为

其中:

式中:为系统的固有频率;为阻尼比。
本文模型阻尼比为0.707,自然频率为2.26 rad/s。
考虑到真实的直升机很难精确建模,为了进一步提高系统鲁棒性,选取零振荡零微分(Zero Vibration and Derivative,简称ZVD)输入整形器。另外,一般的输入整形器仅包含正脉冲,会引起较大的时间延迟,而负脉冲会减少延迟,为避免过高延迟带来的直升机性能下降问题,本文在此构造中增加负脉冲的零振荡零微分输入整形器。负脉冲ZVD 输入整形器最少由3 个脉冲组成,同时需满足约束条件,如式(18)~式(20)所示。
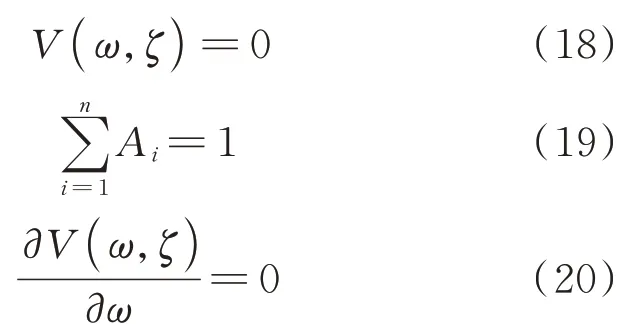
为了简化,选取3 个脉冲组成ZVD 输入整形器,且令=1,=-2,=2,脉冲作用时间=0,和根据 约束 条件 得出,=0.006 87,=0.011 24。
4 仿真与分析
利用MATLAB 中的simulink 模块搭建本文所设计的直升机吊挂飞行控制仿真系统,由操纵指令、输入整形器、控制律(基于显模型跟随的自适应控制)和直升机吊挂模型组成,如图8 所示。
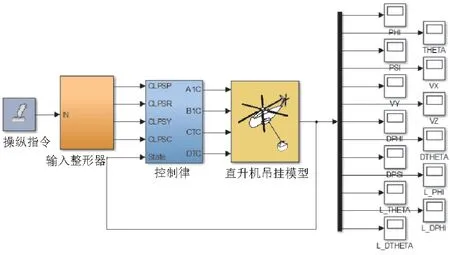
图8 直升机吊挂飞行控制仿真系统Fig.8 Flight control simulation system of helicopter suspension flight
ADS-33E-PRF(美军军用直升机驾驶品质要求)中并没有针对吊挂飞行规定量化考核标准。根据引言所述,吊挂对直升机横向操纵性和稳定性影响更大。在此参照ADS-33E-PRF 对一般状态下横向稳定性的考核方式,在滚转轴施加对脉冲输入,来测试横向稳定性。
仿真使用某型直升机在前飞速度为44 m/s(典型飞行速度)的状态下进行,吊挂载重比为0.33。输入为横向周期杆对脉冲(±12°),即操纵指令;输出为直升机吊挂飞行时的滚转角和横向缆位角。
模型跟随PID 控制器的仿真结果如图9 所示。从图9(a)可以看出:机动过程中滚转角响应对于指令的跟踪效果一般,操纵结束后存在剩余振荡,最大振幅为2.5°;从图9(b)可以看出:操纵后吊挂载荷横向大幅摆动,最大振幅超过8°,导致了直升机的剩余振荡。
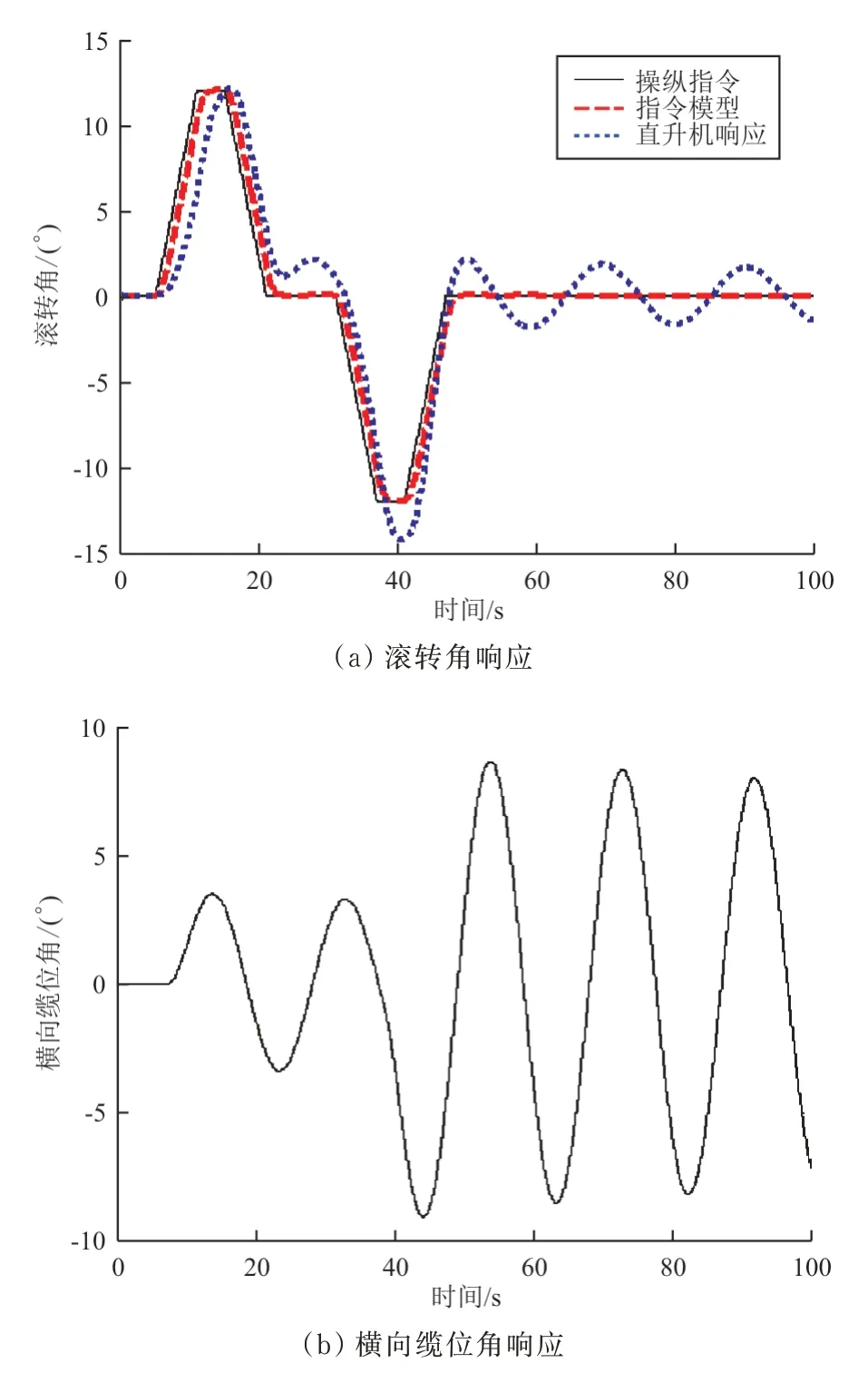
图9 模型跟随PID 控制器仿真结果Fig.9 Simulation of the model-following PID controller
模型跟随自适应控制器的仿真结果如图10 所示。从图10(a)可以看出:机动过程中滚转角响应对于指令的跟踪效果明显提升,但操纵结束后仍然存在剩余振荡;从图10(b)可以看出:操纵后吊挂载荷横向摆动减小,但改善效果有限,最大振幅超过6°。
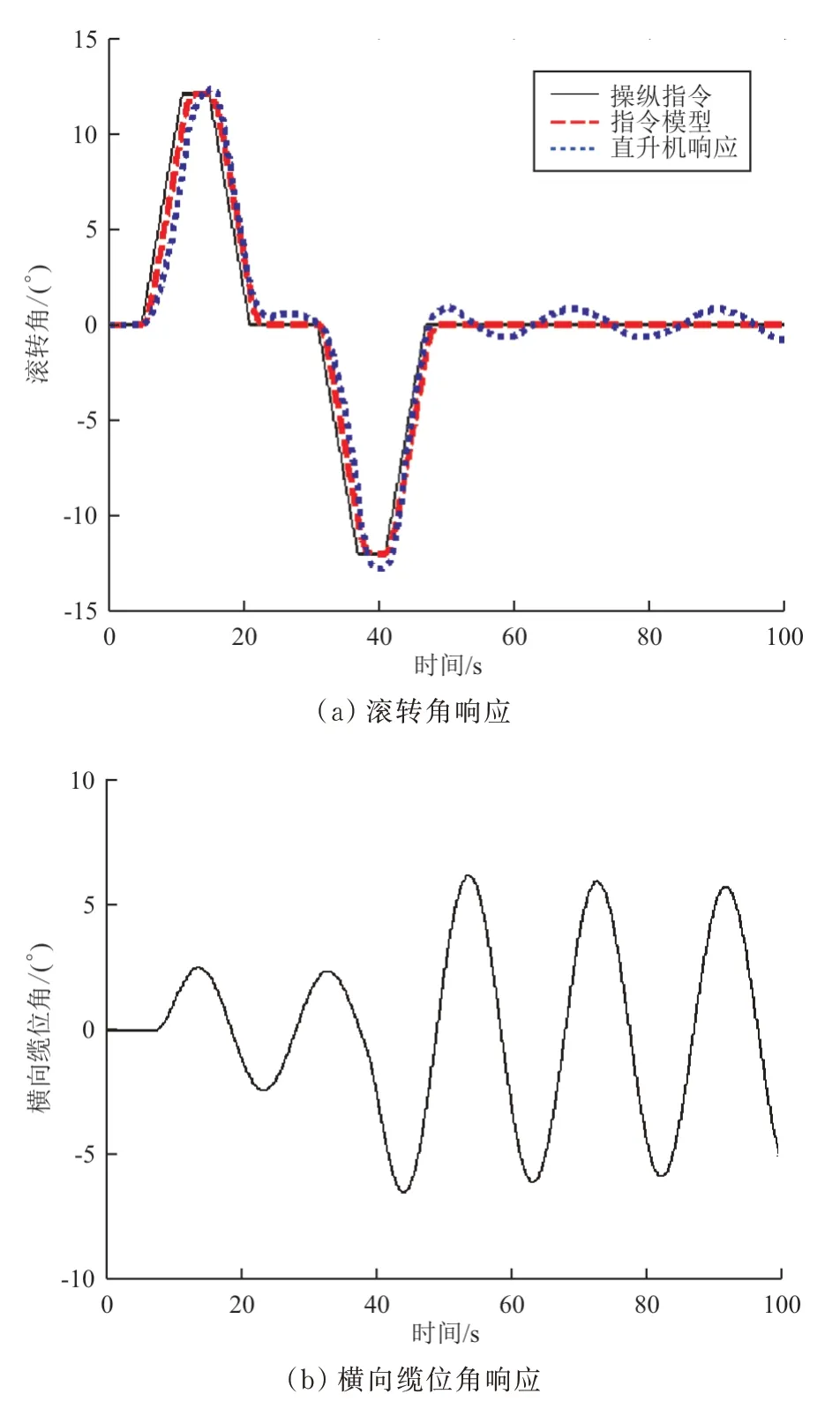
图10 模型跟随自适应控制器仿真结果Fig.10 Simulation of the model-following adaptive controller.
增加输入整形的模型跟随自适应控制器的仿真结果如图11 所示。从图11(a)可以看出:整形后的指令模型较操纵指令有一定的延迟,但是直升机响应跟踪性更好,且没有剩余振荡;从图11(b)可以看出:输入整形后很好抑制了吊挂载荷的振荡,操纵结束后稳定振幅小于0.2°。
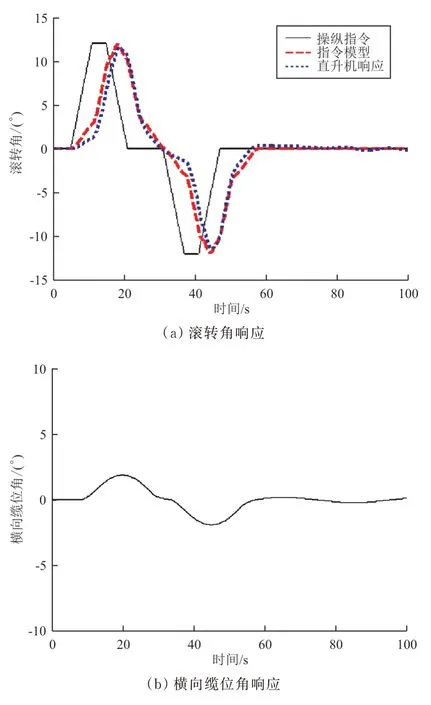
图11 增加输入整形的模型跟随自适应控制器仿真结果Fig.11 Simulation of the model-following adaptive controller with input shaping.
5 结论
(1)本文提出的一种面向工程应用的控制方法,在显模型跟随的控制架构上结合自适应模糊PID 控制和负脉冲ZVD 整形器,可以给飞行员提供良好的操纵性,同时也能解决吊挂飞行时存在的剩余振荡问题。
(2)本文选取某型直升机典型吊挂飞行任务工况(吊挂载重比为0.33)进行仿真分析,能够为直升机吊挂飞行控制律设计提供参考,具有一定的工程应用价值。
