惯量主轴在桡骨粗隆精确定位中的应用研究
2022-04-22王发圣陈杰谢昀
王发圣,陈杰,谢昀
福建医科大学附属第一医院创伤骨科,福州 350005
桡骨粗隆是肱二头肌在桡骨上的止点,是临床定位桡骨小头的重要骨性标志,普遍存在于桡骨颈下内侧且位置固定[1]。既往关于桡骨粗隆在水平面上的定位研究具有一定的主观性[2]。本研究利用工程学惯量主轴原理[3]建立一个基于桡骨惯量主轴的稳定参考系,定量描述和分析CT 水平面图像上桡骨粗隆标志点相对桡骨长轴的旋转角度。
1 材料与方法
1.1 实验材料
研究对象为44例完全去除软组织的无明显缺损的桡骨标本,其中左桡骨17例,编号为L1-L17;右桡骨27例,编号为R1-R27。标本由福建医科大学解剖学教研室提供,实验过程符合福建医科大学尸体标本使用伦理要求。
1.2 实验方法
1.2.1 肉眼观察 对桡骨粗隆上轴向嵴的数量和分布进行观测,依据Mazzocca 等[1]的方法对其进行分类。
1.2.2 CT 扫描及图像传输 将标本分批放置于固定架中进行CT 扫描,每根桡骨以不同摆放位置扫描4次,测量结果取其平均值。本研究扫描参数为:球管电流190 mA,球管电压:140 kv,扫描速度0.35 s/360°,扫描范围:500 mm×500 mm 视窗,扫描层厚度:1 mm。扫描数据以DICOM 格式存储。
1.2.3 图像处理及构建桡骨三维模型 使用Mimics21.0 读取图像文件,该软件自动识别并对读取的CT 图像中每个像素分配其密度值。在Mimics 软件上对原始图像进行阈值分割,在选定的阈值区间将所选取的像素集合成三维图像,即完成桡骨CT 图像的三维模型的建立。
1.2.4 计算桡骨模型惯量主轴 用Mimics 软件自带的数据分析工具对桡骨三维模型进行几何表征。对于每一根桡骨,根据桡骨三维模型中的像素分布通过质心算法[4]计算出该模型的质心,进一步计算出经过其质心的3 条互为垂直的惯量主轴X、Y、Z 轴,其中第一主轴Z 轴是由构成模型的所有点集所描述的回归线,对应桡骨的主旋转轴即桡骨长轴(图2)。
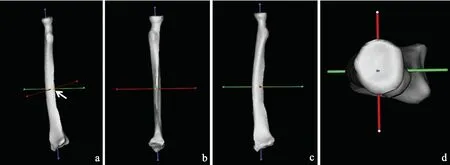
图2 桡骨三维模型惯量主轴(红线为X 轴,绿线为Y 轴,蓝线为Z 轴,白色箭头指质心)a:桡骨模型的质心及3 条惯量主轴X、Y、Z 轴b:X、Z 轴所确定的矢状面c:Y、Z 轴所确定的冠状面d:X、Y 轴所确定的水平面Fig.2 The inertia principal axis of the 3D model of radius(the red line was X axis,the green line was Y axis,the blue line was Z axis,and the white arrow pointed to the center of mass)a:The center of mass and three axes of inertia(X、Y and Z)of the radius model;b:The sagittal plane was determined by the X and Z axes; c:The coronal plane was determined by the Y and Z axes;d:The horizontal plane was determined by the X and Y axes
1.2.5 测量点选取及参考系确定 此次研究选取的桡骨粗隆标志点为桡骨粗隆内侧嵴最突出点,利用Mimics 软件基于桡骨的惯量主轴创建新的CT 水平面视图,在该CT 水平面视图上对标志点进行标记,在建立的三维模型上自动生成对应的标志点,该标志点及三维模型上任意点有其对应的三维坐标。惯量主轴X、Y、Z 在Mimics 软件原始三维坐标系中分别有其对应的向量坐标,见图3。
1.3 角度计算及统计学分析
本研究定义:桡骨粗隆旋转角α为桡骨粗隆标志点与桡骨长轴(Z 轴)轴心连线在水平面相对X 轴的投影角,由内前侧向内后侧角度增加。利用坐标通过几何计算方法算出投影角α度数(图3d)。最后所有数据录入SPSS Statistics 26.0 统计软件进行分析,计量资料以均数±标准差表示,计数资料以百分比表示,并以K-S 检验正态性,sig>0.05 为正态分布,反之为非正态分布。
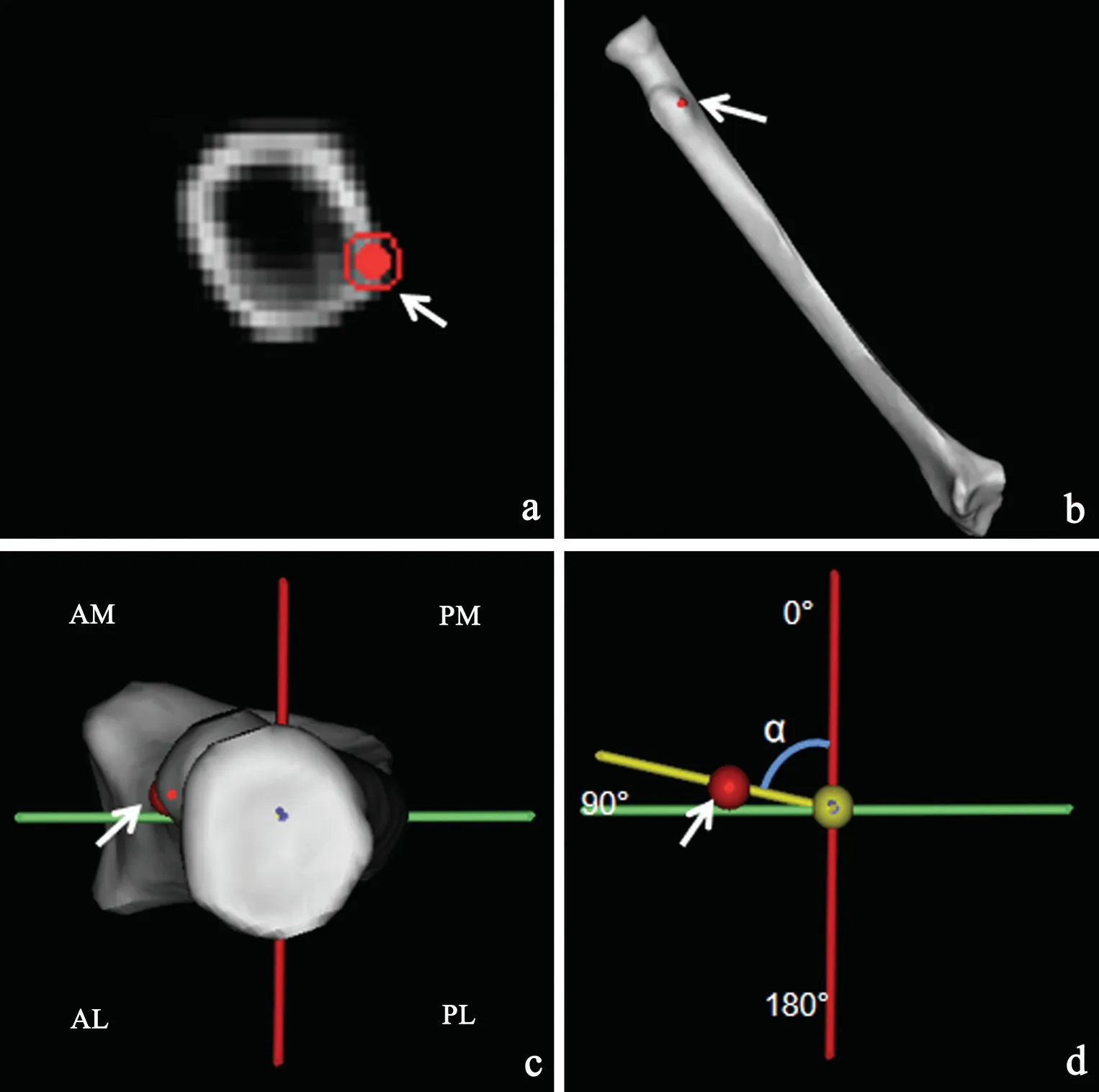
图3 桡骨粗隆标志点及角αa:标记CT 水平面图像上桡骨粗隆后侧嵴最突出点 b:三维模型上对应的标志点 c:桡骨三维模型水平面视图(AL.外前侧 AM.内前侧 PM.内后侧PL.外后侧 红线为X 轴,绿线为Y 轴)d:水平面惯量主轴坐标系Fig.3 The mark point of radius tuberosity and Angle αa: The most prominent point(P)of the posterior ridge of the radial tuberosity was marked on the CT horizontal image(arrow); b: Point P on the 3D model; c:Horizontal view of the 3D model of radius (AL,anterolateral; AM,anterolateral;PM,posterolateral;PL,posterolateral,the red line was X axis,the green line was Y axis); d: Horizontal coordinate frame of the inertia axis
2 结果
2.1 桡骨粗隆分类

图1 Mimics 构建桡骨三维模型a:桡骨原始CT 扫描图像b:阈值分割c:计算模型多义线d:桡骨三维模型Fig.1 3D model of radius constructed by Mimicsa:Original CT scan image of radius; b:Threshold segmentation; c:The polysemous lines of the model; d:3D model of radius

表1 桡骨粗隆类型统计Tab.1 Summary of radius tuberosity type
根据桡骨粗隆上轴向嵴的数量,可分为光滑型(0条嵴)、单嵴型(1 条嵴)、双嵴型(2 条嵴)3 种类型[1]。本研究中未发现光滑型桡骨粗隆,且所有桡骨粗隆存在后侧嵴(图4),结果统计如下。
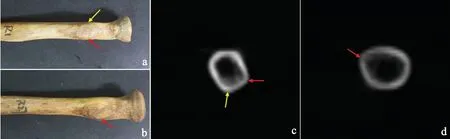
图4 桡骨粗隆肉眼观及其CT 图像(黄色箭头指前侧嵴,红色箭头指后侧嵴)a:双嵴型桡骨粗隆R1 标本b:单嵴型桡骨粗隆R27 标本c:R1 的CT 水平面图像d:R27 的CT 水平面图像Fig.4 Radius tuberosity specimen and its CT image (The yellow arrow indicated the anterior ridge,and the red arrow indicated the posterior ridge)a:The double-ridge type radius tuberosity specimen R1;b:The single-ridge type radius tuberosity specimen R27; c: The CT horizontal image of R1; d: The CT horizontal image of R27
2.2 惯量主轴稳定性验证
在同一根桡骨标本按不同摆放位置扫描4 次分别构建的模型中,观察到模型的质心位置、惯量主轴方向与模型摆放位置、CT 扫描方向无关,质心、惯量主轴在模型上的相对位置始终一致(图5)。
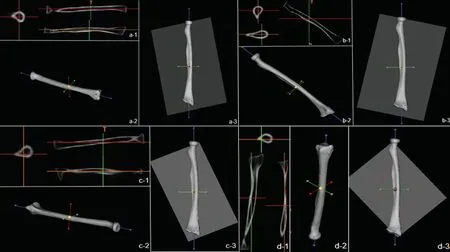
图5 根据L1 不同摆放位置扫描构建CT 三维模型及其质心、惯量主轴Fig.5 The 3D model,center of mass and inertia principal axis were constructed by scanning CT according to different positions of L1
2.3 桡骨粗隆测量角α
桡骨粗隆测量角α的计算结果及统计分析如表2所示。

表2 桡骨粗隆测量角α数值统计Tab.2 The numerical analysis of angle α
上述结果中左右桡骨标本角α数值均呈正态分布,左、右桡骨标本α角经t检验(P>0.05)其差异无统计学意义。经Pearson 相关系数检验,α大小与所在桡骨长度无显著相关性。
3 讨论
3.1 桡骨粗隆定位标志选择
桡骨粗隆是肱二头肌在桡骨的附着点,肱二头肌贡献了肘关节20%旋后和40%屈肘的力量,这对于维持肘关节运动稳定性极为重要[5]。桡骨粗隆的形态与大小尽管在个体之间存在差异,但普遍位于桡骨近端[1]。本研究的观测结果也印证了这一点,且发现无论是肉眼观察还是桡骨CT 影像,44 具桡骨标本的桡骨粗隆均可辨识,将其作为CT 影像上桡骨近端的参照标志是可行的。
基于桡骨粗隆的形态学特点,本研究选取桡骨粗隆上的后侧嵴突出点作为桡骨三维空间结构上相对位置的标志点。Mazzocca 等[1]对128 具桡骨尸体标本进行解剖学研究,依据桡骨粗隆形态、桡骨粗隆上与桡骨长轴平行的轴向嵴突的数量将桡骨粗隆分为光滑型(无嵴型)、单嵴型、双嵴型。在本研究中,桡骨粗隆的嵴在大体标本上清晰可辨别,在CT 水平面视图上也表现为可识别的明显突起;未见典型的光滑型桡骨粗隆,且发现在所有桡骨粗隆中后侧嵴是恒定存在的,这一点是既往研究未曾描述的。肱二头肌与屈肘、前臂旋后运动密切相关,因此桡骨粗隆后侧嵴的存在可能与肱二头肌远端肌腱的分布走行与受力方向有关[6]。由于后侧嵴在桡骨粗隆上结构恒定,CT 视图上亦可清晰辨别,故本研究将其作为桡骨粗隆的精确解剖定位标志。
3.2 解剖坐标参考系选择
精准定位桡骨粗隆的前提是建立一个稳定的空间坐标参考系。Hutchinson 等[2]曾对20 具桡骨粗隆在水平面的位置进行研究,固定桡骨远端的Lister’s 结节和桡骨尺侧保持桡骨标本稳定,选择通过桡骨横断面中心的水平线作为横轴,与之垂直的直线作为纵轴建立平面坐标系。笔者认为这一位置和参考轴的确定容易受到研究者主观因素和标本摆放位置客观因素的影响,其可重复性较差。为提高测量的精确性,需要建立稳定性更好的空间坐标参考系。
既往研究已经验证在旋转、平移或尺寸改变时,骨骼保持其几何特征不变[7],CT 图像能准确地反映扫描骨骼的几何特性。随着CT、MRI 等横断面成像系统在临床和研究中应用的普及,引入横断面成像系统对标本进行更精确的测量是解剖学研究的趋势[8]。CT 成像系统自带的平面正交参考系较Hutchinson 等[2]在尸体标本上建立的参考系显然稳定性更佳,但仍存在较大局限性,因为不仅每次标本扫描时重复相同位置存在一定难度,且不同操作技师、不同仪器有不可避免的因素都可能导致扫描结果的偏差。解决这些问题的关键在于在CT 精确扫描图像的基础上建立一个不受外界干扰而相对于扫描标本保持稳定的参考系。
3.3 基于惯量主轴原理构建解剖参考系
自1750 年数学家欧拉发现并定义惯量主轴,惯量主轴在工程学、力学和微观原子运动等领域已被广泛应用[8]。目前对于惯量主轴的普遍观点认为:对于任一非完全对称的刚体,通过其质心存在3 条互为垂直的主轴,即为该刚体的惯量主轴,它与刚体的形状和质量分布有关,可通过一定数学计算得出[3]。结合前文论述,通过主观划分建立的参考系存在较大不稳定性,而惯量主轴这一基于研究对象性质客观生成的参考轴是相对稳定的。已有研究者应用惯量主轴作为研究髌骨和腕骨形状及结构的解剖坐标系[9,10],研究颞下颌关节运动轨迹变化[11],研究肩关节内各骨运动时的相对位置关系[12],或应用惯量主轴的性质客观量化足骨等不规则骨的形状[13]等等。
研究表明同一种族的健康人群中其桡骨的形态和密度分布具有高度相似性[14]。依据惯量主轴的原理,不同桡骨上的惯量主轴位置是相对恒定的。本研究中观测到桡骨标本以不同位置进行CT 扫描,依据构建模型计算生成的惯量主轴与模型的相对位置是恒定的,其不因模型空间位置的改变而变化(图5)。当不同桡骨的惯量主轴调整至统一的位置时,对应的桡骨便被摆放至相同的位置,便可建立以惯量主轴为基础的解剖坐标系。
此次研究的目的是测量CT 水平面图像上桡骨粗隆相对桡骨的旋转位置,因此选择桡骨的惯量主轴中的X 轴(矢状轴)、Y 轴(冠状轴)建立平面坐标参考系(图3d),测得桡骨粗隆后侧嵴相对于桡骨主旋转轴的旋转角度是(82.93±5.55)°。且发现在惯量主轴参考系中桡骨的位置与标准解剖学姿势前臂处于旋后位时桡骨的位置相仿(图2)。此外,此研究是基于CT 扫描结果,相较于尸体标本研究而言,协助诊断肘关节疾病更切合临床应用。
需要指出的是本研究存在一定的局限性,依据惯量主轴生成的原理,惯量主轴的位置与刚体的形状和质量分布有关,因此惯量主轴的稳定性是建立在刚体形状和质量分布稳定性的基础上。此次研究以Mimics 模拟桡骨形状和密度,但活体桡骨和离体桡骨标本在形状和密度上的差异目前还缺乏研究。就目前的研究发现,以惯量主轴为基础建立的参考系是相对稳定的解剖参考系,随着后续研究,这一参考系可能有更广阔的应用前景及改进。
