地下管线渗漏环境下探地雷达信号特征分析
2022-04-21黄肇刚岳云鹏胡群芳
刘 海 黄肇刚 岳云鹏 崔 杰 胡群芳
①(广州大学土木工程学院 广州 511400)
②(同济大学上海防灾救灾研究所 上海 200092)
1 引言
我国城市地下管线的规模不断扩大,近5年来城市供水管道长度平均年增长约6×104km[1]。但部分管线受管龄长、破损和腐蚀等因素影响,渗漏频发。这不仅造成了严重的水资源浪费,还会对管道周围地基产生影响,形成地下空洞,引发公共安全事故[2]。2017年我国供水管道长度达1.8×106km,平均漏损率达到14.6%,部分城市超过25%[3]。采用准确有效的管线隐蔽缺陷探测技术可以在管线损坏的初始阶段定位病害位置,有利于管理部门对管道进行及时修复,避免因管线损坏引起的基础设施事故。
目前,管线渗漏的探测方法可以简单分为声学方法和非声学方法两种。近年来,多种声学技术被应用于检测管道渗漏和堵塞等[4]。其中,互相关法多用于检测小范围内管道的渗漏情况,但对塑料管道的检测效果较金属管道差[5]。另外,管中水听器在塑料管等低信噪比环境中有较好效果[6,7],但在使用安装上较复杂。此外,光纤传感器通过拾取泄漏振动信号引起光信号中的相位变化来进行更高精度的检测,但该技术需要在纤维外层添加隔音材料来降低外部环境噪声的影响[8],当管道因破损进行维修时需同时更换光纤,安装和维护成本很高。常用的非声学方法包括流量压力监测法、红外热成像法(Infrared Thermography, IR)和探地雷达法等。流量压力监测法适合于评估某片区域内的整体渗漏情况[9],无法准确定位渗漏点。红外热成像法易受环境中其他热源影响[10]。
探地雷达(Ground Penetrating Radar, GPR)作为一种无损、高效的地球物理检测方法,在道路、隧道和桥梁检测等方面有广泛应用,也是地下管线探测和定位的重要手段[11],但将其用于地下水管渗漏探测的研究还比较少。Cataldo等人[12,13]比较了时域反射法(Time Domain Reflectometry,TDR)、探地雷达(GPR)和电阻率层析成像(Electrical Resistance Tomography, ERT)3种技术对地下管道渗漏检测的效果,实际结果表明探地雷达能很好地估计泄漏位置,但易受环境因素影响。国内外学者还进行了模型箱探测试验,Gao等人[14]认为地下输油管道的油泄漏会改变管周围砂土的介电常数,干扰管道反射信号,使2维雷达图像中出现密集震荡信号;Lai等人[15]采集了金属和PVC管道发生渗漏前和发生渗漏过程中的探地雷达3维图像,通过3维切片和等值面图分析地下水管因漏水引起的扰动特征;Ocaña-Levario等人[16]为简化GPR数据处理中的解释工作,采用方差滤波方法把管道和渗漏区的特征从雷达图像中显现出来,但效果受环境影响明显。胡群芳等人[17]把3维雷达探测应用在城市市政管道渗漏的探测中,发现在水管渗漏后管线反射信号下方出现明显震荡信号。Lau等人[18]通过对雷达图像中目标物双曲线曲率的拟合来计算电磁波在土体中的传播速度,根据电磁波波速的下降情况来推断渗漏点的位置。沈宇鹏等人[19]通过对管道不同点位渗漏的电磁场模拟,总结了管道渗漏的雷达正演图像特征。
上述文献分析了渗漏的典型雷达信号特征,但对其成因缺乏具体解释。本文通过PVC和金属管线渗漏的模型试验,模拟实际地下管道的渗漏过程,并结合渗流场-电磁场耦合的数值模拟,对雷达信号进行特征分析和传播路径解译,分析爬行波的传播和衰减机制,揭示渗漏区震荡信号的形成机理。为地下管线渗漏检测的探地雷达图像的解译提供依据。
2 模型试验
本模型试验的目的是采集地下金属管和PVC的渗漏前后的探地雷达剖面。
2.1 试验方案
试验方案如图1所示。首先在颗粒较均匀和杂质较少的砂土(某海滩)中,先后埋入一根长1.5 m,直径同为0.16 m的PVC水管和金属管。覆土层厚度0.35 m,并在水管顶部中点处留有直径7 mm的渗漏孔。管道的一端与控制水箱连接,另一端通过弯管连通大气。水箱底部与埋置后的管道高差为2 m,渗漏时水压约为0.02 MPa。渗漏量为24 L,渗漏过程耗时30 min。试验区域大小为1.5 m×2 m×1 m,采用中心频率为900 MHz的天线,在渗漏点位置处沿垂直于管线方向进行数据采集,测线长度约2.2 m,道间距为1 cm,每道信号的时窗为40 ns,采样点为512。渗漏试验开始前用时域反射计测得试验场地渗漏孔附近砂子相对介电常数为3.8,电导率为6.2 mS/m,渗漏结束后开挖测得渗漏点附近砂子相对介电常数为16.4,电导率为38.4 mS/m。由于渗漏结束后,渗漏点附近处的水会受重力影响继续下渗,开挖后渗漏点附近出砂子测得的介电参数与雷达采集数据时的存在一定差异。

图1 水管渗漏模拟探测试验场地及试验方案
2.2 试验结果分析
对采集到的雷达数据先后进行零时校正,去直流,减背景,带通滤波和包络增益处理。首先,将探地雷达剖面的零时刻调整到砂地表面。然后,取每道数据中15~40 ns的振幅平均值作为信号的直流分量,进行去直流处理。再通过减去整个雷达剖面的振幅平均值来去除背景杂波。接着进行带通滤波,上、下截止频率分别为1200 MHz和500 MHz。最后对剖面的每一道数据做希尔伯特变换取包络,进行包络叠加获得剖面整体的包络线,归一化后取倒数作为增益曲线进行增益。
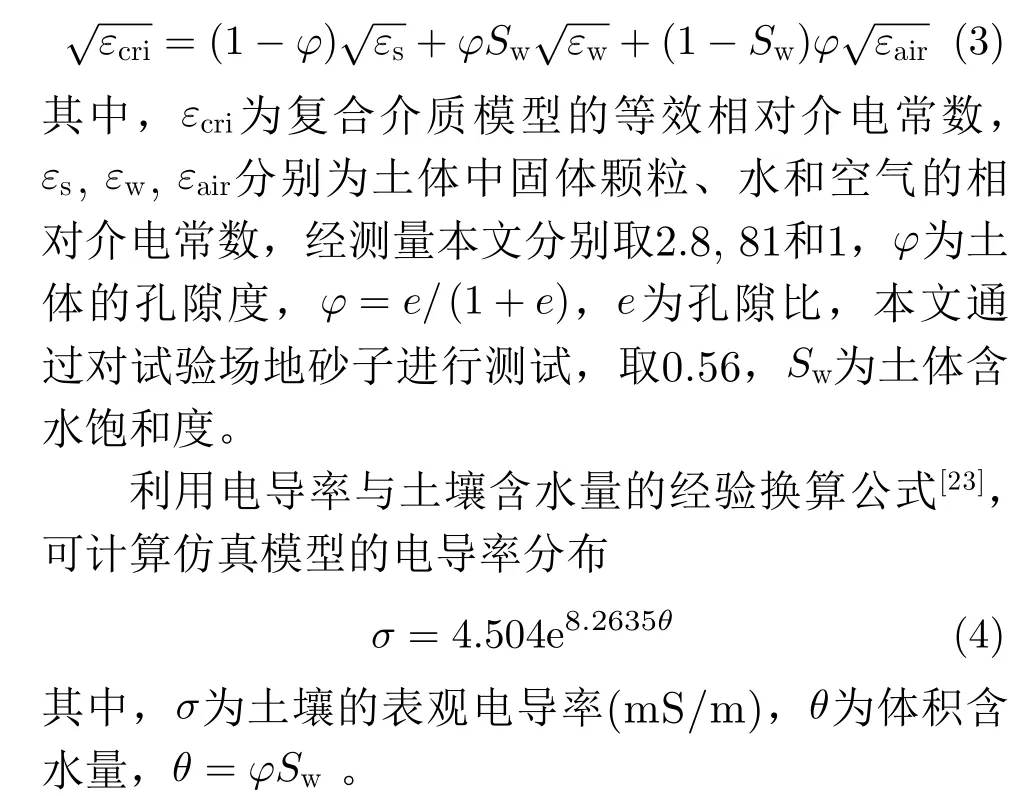
含水PVC管和金属管渗漏前后的雷达图像预处理结果如图2、图3所示。由于电磁波能穿透PVC管道,在PVC管渗漏前的雷达图像中能看到管道顶部和底部的双曲线反射,金属管渗漏前的雷达图像中只能看到管道顶部反射。两种管道渗漏后的雷达图像中都可以观察到震荡信号且能量明显增强,震荡信号可以作为识别管道渗漏的重要图像特征[20]。

图2 砂地试验PVC管渗漏前后实测雷达图像
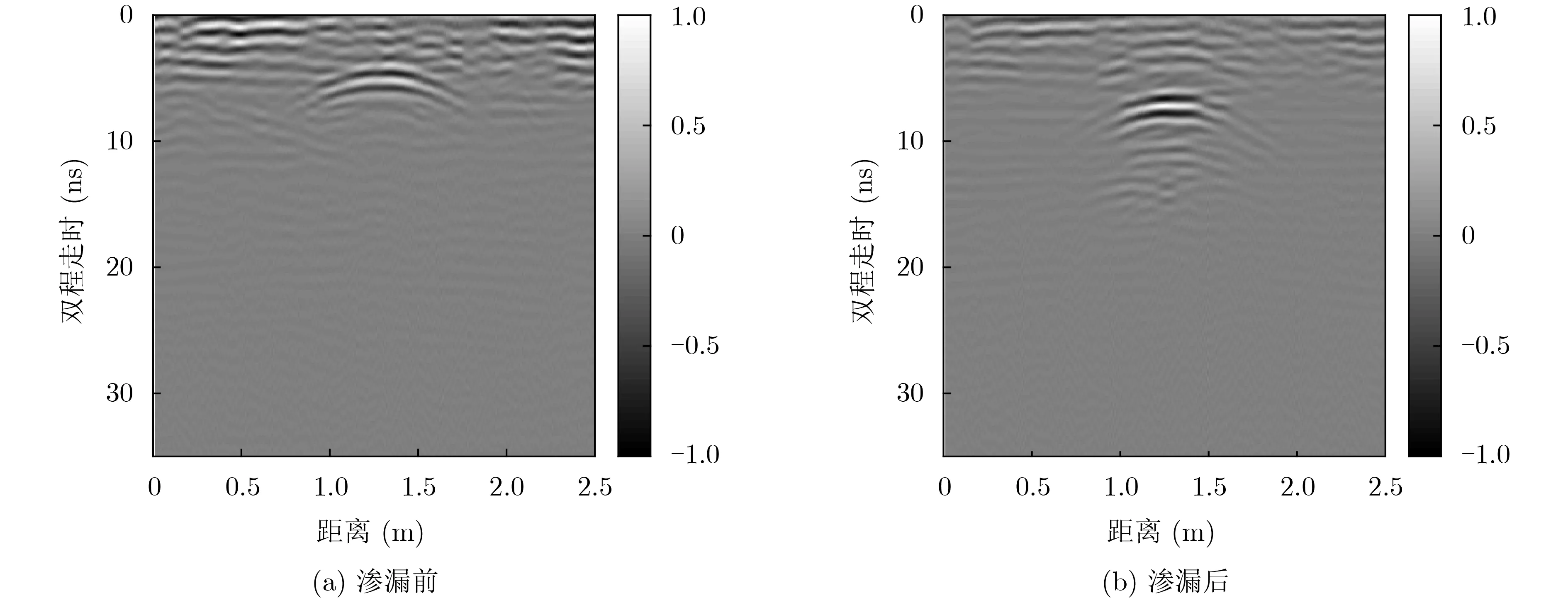
图3 砂地试验金属管渗漏前后实测雷达图像
3 仿真试验
为探究渗漏后震荡信号的形成原因,对水管渗漏进行渗流场-电磁场耦合仿真试验,与实测雷达数据进行比对分析,为应用探地雷达准确识别管道渗漏提供基础。
3.1 渗流场仿真
水管渗漏过程中,水管周围土体从非饱和土体变为饱和土体。假定固体不流动而液体填充孔隙空间,排出气体,含水量逐渐增大直至饱和度为1。达西定律适用于表征水管渗漏过程中的饱和—非饱和渗流过程

本文采用ABAQUS数值分析软件对金属管和PVC管的渗漏情况进行了渗流场仿真模拟,背景砂土介质模型为多孔介质模型,大小为2 m×1.5 m×2 m,土体密度为 1486 kg/m3,弹性模量为2.5×107Pa,泊松比为0.3,渗透系数设为6×10–3m/s,吸湿曲线通过表1数据来确定。在初始条件中,设置土体初始孔压为 –14 kPa,初始含水饱和度为0.2,孔隙比为0.56,设置与土体重力平衡的地应力。边界条件为在渗漏点区域设置渗漏压力0.02 MPa,渗流速度约为0.34 m/s,渗流时间为30 min。

表1 孔压和饱和度之间的关系
对模型进行运算后得到水管周围土体的体积含水率,图4展示了渗漏发生后水管周围土体饱和度随时间的变化过程。渗漏区以渗漏点为中心先呈圆形/椭圆形状,随着渗漏量的增加,土体总体饱和度上升,渗漏区向四周扩张,并由于重力的作用向下方下渗。如图4(d)所示,渗漏24 L后饱和度从渗漏点向四周呈梯度下降状态,存在一定分层,越接近渗漏点,土体的含水饱和度越高,渗漏点附近土体含水饱和。

图4 水管渗漏过程中管道周围土体饱和度分布图
3.2 电磁场仿真
利用图4(d)所示的模型饱和度分布图,根据折射系数模型(CRIM)[22],可计算湿砂复合介质的介电常数和电导率。
经计算后电磁场仿真模型的介电参数情况如图5(a)、图5(b)所示,可以观察到相对介电常数模型和电导率模型存在一定分层,在非渗漏区,相对介电常数约为5,电导率约为8 mS/m;在渗漏区非饱和区域,相对介电常数约为14,电导率约为22 mS/m;在饱和区域,相对介电常数约为28,电导率约为65 mS/m。
根据图5(a)、图5(b)的介电参数建立电磁场数值模拟模型,模型大小为1 m×1 m,网格大小为0.001 m×0.001 m。利用GprMax模拟探地雷达图像[24],天线收发间距为0.1 m,天线步进长度为0.01 m,共模拟80道数据。

图5 由土体饱和度分布计算得到的介电模型
4 结果与讨论
比对雷达实测数据和仿真结果的波场快照,含水PVC管道渗漏前测得的雷达图像中标示的双曲线信号的传播路径如图6(c)所示。图6(a)、图6(b)中①和②分别是管道顶部的反射和2次反射;③是由电磁波穿透管道后绕管道爬行约1/4圆周的爬行波[25]引起的;④是电磁波透过管内水体至管道底部的反射;⑤是电磁波在管道内部2次反射后从管道底部出射后绕管道爬行约1/4圆周的爬行波;⑥是管道底部反射在管道内部2次反射造成的。由于仿真模型和现场砂土的介电常数分布存在差异,双曲线的位置存在一些差异。且仿真结果中,由于爬行波和多次反射波存在叠合,因此爬行波在图像中不易分辨。

图6 满水PVC管的探地雷达图像和反射信号传播路径分析
PVC管渗漏后,渗漏区域的介电常数会升高,与非渗漏区存在明显差异,在雷达图像中能看到渗漏区与非渗漏区的分界面[26]。同样,渗漏区内饱和区域和非饱和区域的介电常数也存在明显差异,在实测的雷达图像中能明显观察到,图7(a)中①为渗漏区界面反射;②为饱和区界面反射;③为水管顶部反射。由于介电常数上升,电磁波波速变小,所以水管顶部反射在图像中下移。水管顶部反射在饱和区、渗漏区间存在多次反射,表现为在③标示的管道顶部反射下方存在复杂的震荡信号。而在仿真图像中,各界面反射的多次波能分开,能量也较弱。这是由于实际情况中,渗漏孔周围的砂子的孔隙率可能因渗漏的存在而改变,造成电磁波的反射变得更加复杂。④是电磁波从管道出射后绕管道爬行约1/4圆周的爬行波;⑤是电磁波透过管内水体至管道底部的反射。同样由于在饱和区、渗漏区间存在多次反射,管道底部反射下方也存在复杂的震荡信号。③④⑤在仿真和实测结果中的走时不同,是因为仿真模型和现场砂土的介电常数分布存在差异。

图7 PVC管渗漏后的探地雷达图像和反射信号传播路径分析
对于地下埋藏的金属管线,电磁波不能进入管道内部,只能看到管道顶部反射的双曲线,未能观察到其他反射。原因是由于爬行波在传播过程中呈指数衰减严重[27],爬行波需沿着外管壁爬行约半周,相比穿透PVC管后爬行约1/4圆周衰减更严重,在图像中难以观测。因为渗漏会在管道周围形成渗漏区,在介电常数上与周围土体相比差异明显。如图8(a)所示,金属管渗漏后出现的震荡信号是由多次波造成的。比对实测数据和仿真数据,可以得到电磁波的传播路径如图8(c)所示,①是渗漏区的反射,②是金属管顶部的反射,③是金属管反射后在金属管与渗漏区间2次反射造成的。在仿真数据中由于没有噪声影响,由此能看到渗漏区界面的多次波和其他多次波产生的双曲线。而在实测雷达图像中,受环境因数影响,在③下方无法观察到完整的双曲线。由于管道渗漏造成的渗漏点附近的介电常数增大,反射系数较渗漏前大,渗漏后的实测的雷达图像中管道顶部的反射能量更为强烈。

图8 金属管渗漏后的探地雷达图像和反射信号传播路径分析
5 结论与展望
针对目前地下管线渗漏的探地雷达震荡信号形成机理尚不清晰的问题,本文利用模型试验采集砂土中PVC管和金属管渗漏前后的雷达信号,并通过渗流场-电磁场数值模拟分析渗漏区雷达反射信号的传播路径。研究主要结论如下:
(1)地下水管在渗漏后会在水管周围形成与渗漏区外土体介电参数相差较大的湿润区,湿润区存在一定分层状态,越接近渗漏点的土壤含水饱和度越高。电磁波在管线渗漏区传播过程中存在更多界面反射和界面间的多次波,管道的反射也会在湿润区产生多次波,使得雷达图像出现复杂的震荡信号。
(2)PVC管渗漏后,渗漏区反射,管道反射,多次波与在管道底部出射后绕PVC管传播的爬行波相互叠合,能量增强,形成雷达图像中管道顶部和管道底部反射下方复杂的震荡信号。金属管渗漏后,能明显看到管道与渗漏区间的多次反射。
(3)在实际地下管线探地雷达探测中,对于PVC管道,若雷达图像中出现多次规则的震荡的信号,则该管线为含水管道。若多次震荡信号杂乱且部分区域能量增强则该管道周围可能存在湿润区和渗漏点。对于金属管道,若雷达图像中存在多次波,则该管道周围可能存在湿润区和渗漏点。
在以后的工作中可以根据地下水管渗漏前后雷达图像在渗漏区域的信号差异,由水管渗漏产生的典型震荡信号特征定位渗漏点。并通过分析爬行波和管道反射间的延时,有望估计管道直径和管道周围土体的介电常数。
