“祝融号”火星车次表层雷达干/水冰探测类比试验
2022-04-21李鉴辉方广有
刘 海 李鉴辉 孟 旭 周 斌 方广有
①(广州大学土木工程学院 广州 510006)
②(中国科学院空天信息创新研究院 北京 100094)
1 引言
火星是太阳系内的类地行星之一,人类从20世纪60年代开始探索火星,关于火星次表层水冰/液态水等的探测仍是当前国际深空探测与研究的热点[1]。由于表面温度远低于0 °C,且大气稀薄[2],因此当前的火星表面环境不支持液态水的稳定存在[3]。但火星两极的巨大冰盖、典型的地貌特征和矿物组成均表明火星表面曾经存在大量液态水,这些曾经存在的液态水可能以水冰的形式存在于地下次表层中[3–6]。探地雷达(Ground Penetrating Radar, GPR)作为一种探测次表层结构和成分的有效工具,现阶段已在月球探测领域得到成功应用[7–11]。中国首辆火星车“祝融号”于2021年5月22日在火星北半球的乌托邦平原开始巡视探索,截至2021年12月31日,累计行驶1400 m[12]。
作为科学荷载之一的火星车次表层穿透雷达(Mars Rover Penetrating Radar, RoPeR)采用线性调频(Linear Frequency Modulation, LFM)雷达体制,包含两个不同中心频率的通道,其中高频通道使用一对两两组合的Vivaldi天线,可采集HH, HV,VH和VV4种不同极化通道的全极化雷达回波信号,工作频率范围为0.45~2.15 GHz[13],探测深度范围为3~10 m,垂直方向探测分辨率达厘米级。RoPeR的主要科学目标之一是探测火星次表层中潜在的冰,并区分出干冰与水冰,与轨道器探测雷达相比,火星车搭载的次表层探测雷达不受大气干扰,可与其他多种科学载荷协同工作,已经在着陆点(乌托邦平原)获取了大量的探测数据,为火星探测提供宝贵的科学资料[14]。
基于此,本文搭建了与“祝融号”火星车次表层探测雷达高频通道相同的全极化雷达系统,之后在实验室内进行了干冰和水冰的室内类比探测试验,并采用H −α极化分解方法分析了干冰和水冰的极化散射特性。本文的试验结果初步证明RoPeR具备探测和识别火星次表层中干冰与水冰的能力,可为火星实测雷达数据的分析解译提供参考。
2 RoPeR系统
天线系统是“祝融号”火星车次表层探测雷达的关键组成部分,其高频通道包括两组发射天线和接收天线,如图1(a)所示,发射天线底部距地面345 mm,接收天线距地面306 mm,两者水平距离为420 mm。发射天线和接收天线均由分别正交的4个Vivaldi天线组成,其目的是确保H和V两个极化通道的天线相位中心一致,单个天线宽280 mm,高170 mm,如图1(b)所示。
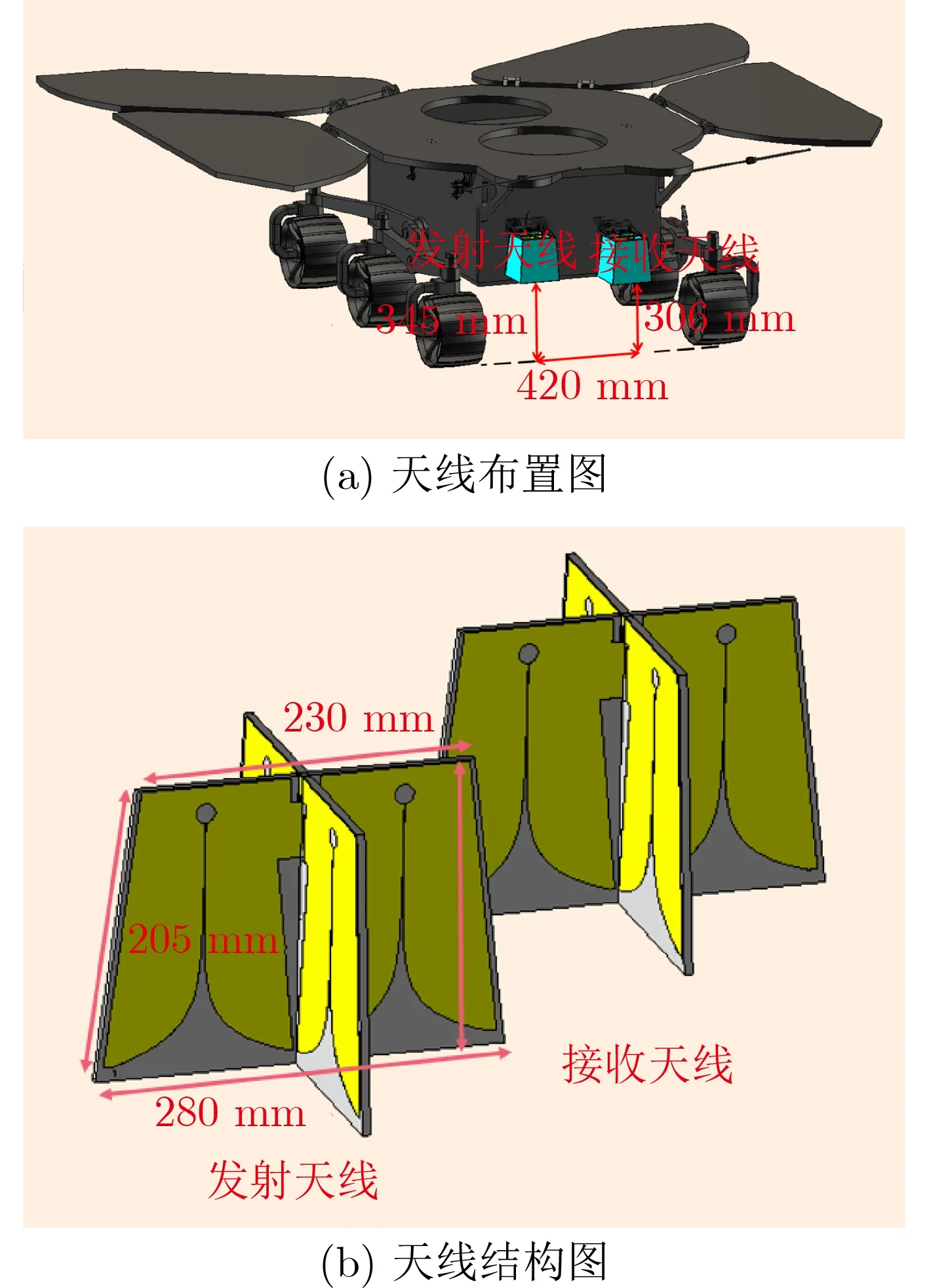
图1 RoPeR天线布置与结构图
嫦娥三号和四号上搭载测月雷达(L u n a r Penetrating Radar, LPR)采用脉冲雷达体制,由雪崩三极管产生工作电压约为300 V的脉冲信号激励发射天线。与月球表面接近真空的大气环境不同[15,16],火星表面的大气压强约为1 kPa,电子器件在火星大气环境下处于较高工作电压时易产生低压放电,造成绝缘介质击穿、信号功率下降和电子器件永久损坏等危害[17]。因此,为了避免过高的瞬时工作电压,“祝融号”次表层探测雷达采用脉宽为4 ms的线性调频信号作为发射源,发射功率为+27 dBm,接收灵敏度为–120 dBm,功耗为26.5 W[13]。
3 试验设置
本文搭建了与火星次表层探测雷达高频通道相似的雷达探测系统,并在实验室内进行了干冰和水冰的雷达探测类比试验。图2为本文建立的步进频率极化雷达系统,该系统由与RoPeR相同的Vivaldi天线阵列、矢量网络分析仪(Vector Network Analyzer, VNA)、直线模组以及PC控制单元等部件组成。VNA通过同轴传输线与发射天线与接收天线的端口相连,发射和采集电磁波信号,并通过切换同轴传输线与不同天线端口的连接实现不同极化方向的信号采集。PC端控制直线模组精准移动天线位置,并同步控制VNA实现雷达数据的采集和储存。
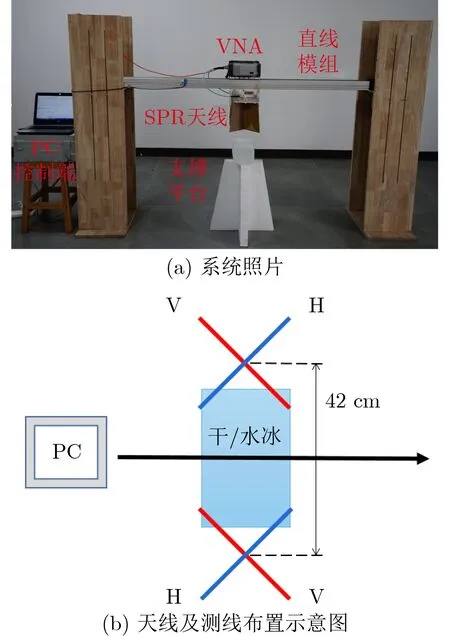
图2 干冰/水冰探测试验布置图
试验使用的干冰样品是在液氮冷却的有压容器内,通过冷凝气相二氧化碳制备的[18,19]。为模拟野外环境中水冰的冻结规律,减小冰内气泡对雷达反射信号的影响,本文的水冰样品由煮沸的纯水静置于–17 °C的冰箱制作而成。试验使用的干冰和水冰目标如图3所示,为避免样品几何形状的不同对结果的影响,所使用干冰/水冰样品具有相同的水平尺寸。试验过程中冰样品均放置在锥形泡沫平台上,天线底部与冰面之间的间距为10 cm。天线间距为42 cm,测线垂直于冰样的长边布置(图2)。测线扫描长度为75 cm,步进间距为1 cm。VNA采样频率范围为50 MHz至4 GHz,采样点数为512,一条测线的数据采集时间仅38 s,可避免干冰升华与水冰融化对探测和成像结果造成影响。
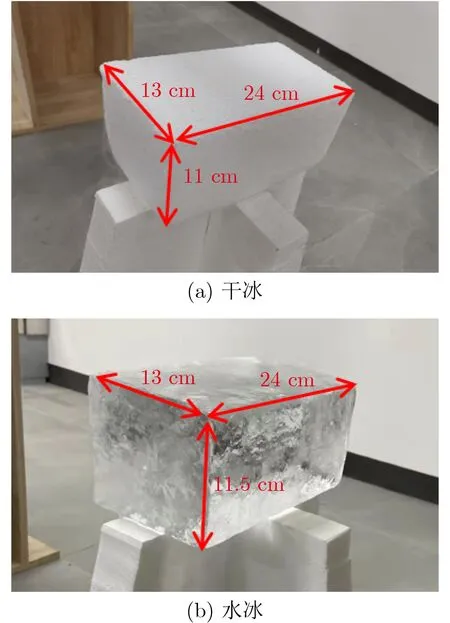
图3 干冰/水冰目标及其尺寸
4 试验结果与分析
采集数据后,采用相位中心校准与极化校准对原始数据进行修正[20,21]。为了抑制背景噪声,突出目标反射,对数据进行预处理,处理步骤包括背景去除、带通滤波和零时校正。预处理后干冰和水冰样品的2维雷达探测图像分别如图4和图5所示。两个冰样的顶部和底部反射可以很清楚地观察到,但很难从视觉上区分两者的雷达图像特征。

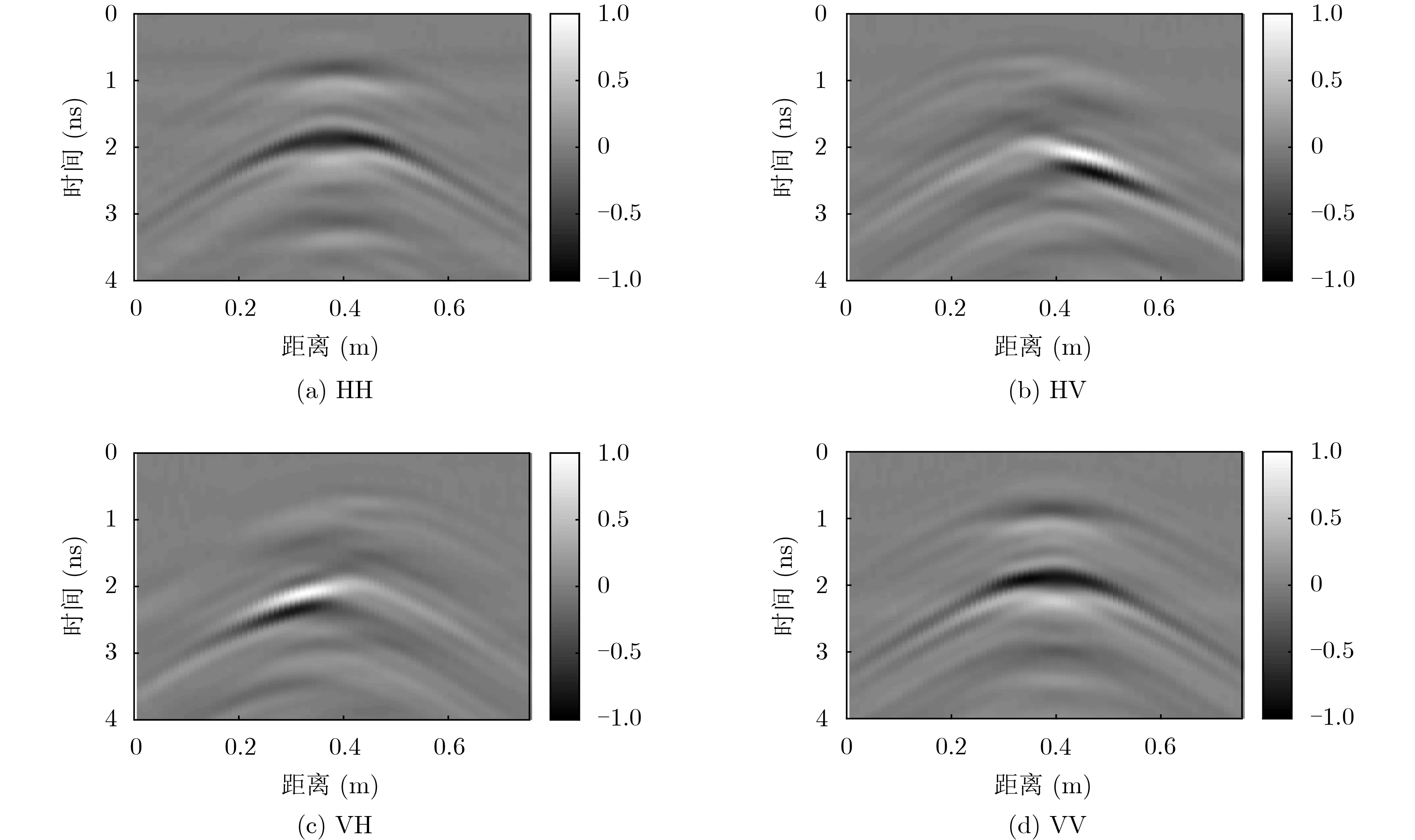
图4 干冰不同极化通道的2维雷达剖面

Z1表示高熵多次散射,对应复杂结构的散射;
Z2表示高熵植被散射,对应随机的散射元素各向异性的散射;
Z3表示高熵表面散射,对应无法被分类的散射;
Z4表示中熵多次散射,对应具有中等熵双反射传播效应的散射;
Z5表示中熵植被散射,对应偶极子散射机制主导的散射;
Z6表示中熵表面散射,对应由于表面粗糙度的变化造成熵增加的散射;
Z7表示低熵多重散射,对应金属二面角散射;
Z8表示低熵偶极子散射,代表HH和VV两个极化方向目标能量有很大差异的散射;
Z9表示低熵表面散射,代表光滑平面的散射。
对图4和图5的雷达数据进行逆时偏移[25],聚焦冰样品的表面和底部反射能量,因篇幅限制,本文未展示偏移后的图像。逆时偏移后在4个极化通道的重构图像中根据振幅提取目标反射信号,组合成全极化散射矩阵进行极化分析,通过H −α分解提取出目标极化属性,并且绘制H −α平面图(如图6所示),以分析干/水冰目标的极化散射特性。从如图7和图8可以发现干冰顶部极化分解结果位于Z9区域(低熵表面散射区)。其底部的极化分解结果主要位于Z8(低熵偶极子散射区)和Z9区域。Z8区域是由于干冰中随机分布的微小条形结构引起的偶极子散射,而Z9区域则是因为干冰表面平整而引起的表面散射,如图9(a)所示。

图5 水冰不同极化通道的2维雷达剖面

图6 2维H −α平面图

图7 干冰样品反射信号的极化分解结果
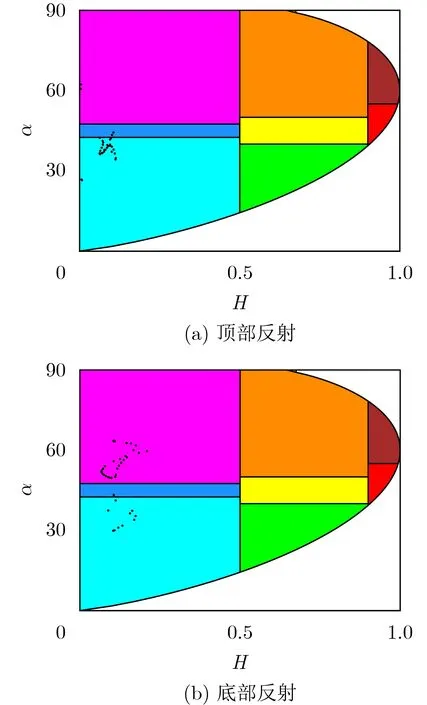
图8 水冰样品反射信号的极化分解结果
水冰顶部的极化分解结果主要在Z9区域,这是由于水冰顶部较为光滑而引起的表面散射。而水冰底部的极化分解结果分布在Z7(低熵多重散射)、Z8和Z9区域。出现在Z7和Z8区域是因为水冰内部有棱角分明的柱状结构,符合二面角和偶极子散射,如图9(b)所示。
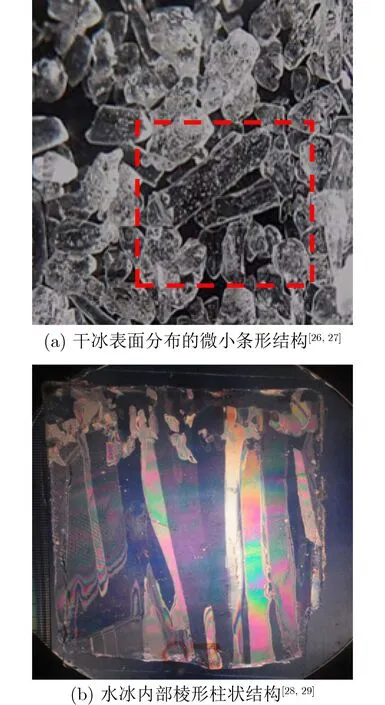
图9 干/水冰细微结构图
5 结束语
本文使用我国火星车次表层探测雷达高频通道所采用的天线阵列搭建了极化探地雷达系统并开展了室内试验,研究了极化探地雷达探测和区分干冰/水冰的能力。初步试验结果表明:
(1)干冰和水冰目标在2维雷达剖面中呈现相似的图像特征,难以区分。
(2)对偏移后的2维雷达剖面应用H −α分解,干冰顶部位于Z9区域(低熵表面散射区),其底部的极化分解结果主要位于Z8(低熵多次散射区)和Z9区域。水冰顶部的极化分解结果在Z9低熵表面散射区,水冰底部的极化分解结果分布在Z7(低熵多重散射区)、Z8和Z9区域。干冰与水冰呈现不同的极化散射特性,因此利用H −α极化分解方法区分火星表土中的干冰和水冰是可行的。
未来工作将进行模拟火星土壤环境中的干冰与水冰室内探测试验,探究利用H −α极化分解识别和区分火壤中干冰与水冰的能力,并对已经返回地球的RoPeR实测数据进行分析。
