多径信道下基于CMA算法的SOQPSK-TG盲均衡
2022-04-21廖红姣赖鹏辉王世练马艳敏
廖红姣,赖鹏辉*,董 蕤,王世练,张 炜,马艳敏
(1.国防科技大学 电子科学学院,湖南 长沙 410073;2.北京交通大学 电子信息工程学院,北京 100044;3.中国人民解放军31006部队,北京 100089)
0 引言
部分响应成形偏移正交相移键控(Shaped Offset QPSK,version TG,SOQPSK-TG)以其相位连续、包络恒定和频谱利用率高等优良特性,广泛应用于航空遥测领域中[1-3],且被列入遥测IRIG 106标准[4]。
在“低仰角”场景下,遥测信号的传输会受到多径的影响[5],信道均衡技术是一种常见的克服多径衰落的方法。由于航空遥测的信道特性复杂、线性均衡的效果不好,为了提高均衡有效性,Lucky[6]提出了自适应均衡技术。常用的自适应均衡算法可分为有训练序列的均衡和盲均衡算法。有训练序列的均衡算法包括最小均方(Least Mean Squares,LMS)[7]和递归最小二乘(Recursive Least Squares,RLS)[8-9]算法等,其收敛速度快、实时性好,但是需要人为插入训练序列。为解决上述问题需要占用额外频带资源,研究人员提出了盲均衡技术。
恒模算法(Constant Modulus Algorithm,CMA)[10]因其具有计算量小、良好的全局收敛性等特点,被广泛应用于通信系统中,文献[11]在理想同步下,对遥测多径信道使用CMA均衡进行了研究。本文针对遥测领域的3个典型“低仰角”场景,即滑行场景、起飞场景和远航场景,在非理想同步下,在同步和检测之前使用CMA完成盲均衡,评估SOQPSK-TG接收机中使用CMA抑制多径衰落的效能。
1 SOQPSK-TG信号
SOQPSK-TG信号的表达式为:
s(t)=ejφ(t;α),
(1)
式中,φ(t)为相位;α为受限的伪三进制序列。当nT≤t≤(n+1)T时,φ(t)可以表示为:
(2)
式中,N表示符号间的关联长度,关联长度越长,主瓣越窄,复杂度越高。对于SOQPSK-TG信号,N=8。αk可以进一步表示为:
αk=(-1)k+1(2bk-1-1)(bk-bk-2),
(3)
式中,bk表示输入的二进制比特流。
相位脉冲响应q(t)为:
(4)
式中,f(t)为频率脉冲,可以表示为:
(5)
式中,A为使脉冲积分为1/2的常数;B=1.25;ρ=0.7;ω(t)为窗函数,可以表示为:
(6)
式中,T1=1.5;T2=0.5。
2 基于CMA盲均衡的SOQPSK接收
2.1 CMA
CMA又称为Sato算法[12],具有对接收信号载波频偏和相偏不敏感等特性[13],被广泛应用于数字通信系统中[14],算法的结构框图如图1所示。

图1 CMA系统框图
图1中,s(n)表示输入信号,z(n)表示加性高斯白噪声,e(n)表示误差信号,h(n)表示多径信道的信道冲击响应,可以表示为:
(7)
式中,L为传播的路径数;Γk为第K条路径相对于直射路径的反射强度,其值决定了各路径分量的相对功率大小;τk为第K条路径的时延。
CMA的代价函数JCMA表示为:
JCMA=E{|e(n)|2}=E{(|yn|2-R2)2},
(8)
此代价函数是通过考虑均衡器输出信号与期望信号CMA圆的距离来执行均衡[15],其中,R2为接收信号x(n)所在的CMA圆半径的平方,对于SOQPSK-TG信号,由于其具有连续相位的性质,可以表示为:s(n)=exp{jφ(n)},所以,CMA圆的半径值为1,R2=1。y(n)表示均衡器的输出信号,可以表示为:
(9)
式中,W(n)为均衡器的抽头系数;XH(n)为接收信号的共轭转置。采用随机梯度下降法,迭代算法可以表示为:
wn+1(m)=wn(m)-μe(n)x*(n-m),
(10)
式中,μ为迭代步长;x*(n)为接收信号x(n)的共轭;误差信号e(n)可以表示为:
e(n)=(|y(n)|2-1)y(n)。
(11)
2.2 SOQPSK-TG接收系统
SOQPSK-TG接收结构如图2所示,经采样、数字下变频后的基带数字接收信号x(n)直接进行CMA均衡,之后经过载波、定时同步和检测,同步、检测的具体细节参考文献[16]。

图2 SOQPSK-TG接收结构
3 信道模型和仿真结果
Rice等[17]在爱德华空军基地(AFB)描述了遥测多径信道模型。滑行场景、起飞场景和远航场景的多径信道统计数据被提出和应用在PCM/FM信号传输中[18]。本小节将发送信号分别通过3种信道,分析CMA均衡效能。
参考目前遥测链路实际情况,将SOQPSK-TG信号的速率设定为4 Mb/s,同时为了提升CMA均衡的有效性和收敛速度,CMA的参数选择为:步长0.000 2,滤波器抽头数121,滤波器中心抽头初始值0.8。
3.1 滑行场景
遥测飞行器降落在跑道上滑行时,地面障碍物多,发送端和接收端之间传输路径数较多;由于发送端和接收端相对位置变化较快,会产生多普勒频移。假定滑行场景的信道统计数据如表1所示。

表1 滑行场景信道模型
滑行场景中误差收敛曲线如图3所示。图中显示了滑行场景中均衡后在Eb/N0=30 dB的误差收敛曲线,其在迭代1 000次左右收敛,剩余误差为0.1。

图3 滑行场景中误差收敛曲线
滑行场景中误码率曲线如图4所示,显示了有均衡和无均衡2种情况下的误码率曲线对比。从误码率曲线可以看出,使用CMA均衡后,检测性能可以提升3~3.1 dB(BER=10-5)。

图4 滑行场景中误码率曲线
3.2 起飞场景
在起飞过程中,飞机飞行高度逐渐远离地面,多径环境参数如表2所示,与滑行场景相比时延更大、幅度衰减更大。
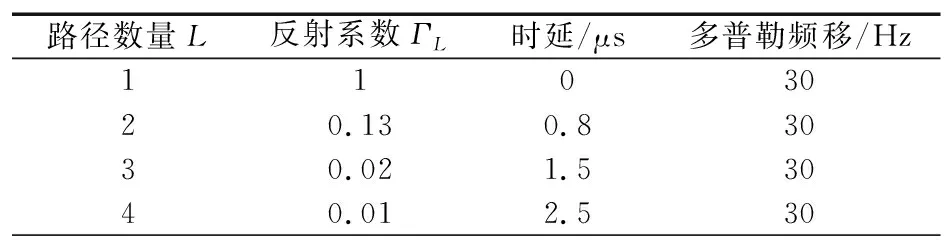
表2 起飞场景信道模型
起飞场景中均衡后的误差收敛曲线如图5所示,其收敛速度快,剩余误差小而稳定。

图5 起飞场景中误差收敛曲线
起飞场景中误码率曲线如图6所示。显示了CMA能提升0.9~1 dB(BER=10-5)的性能增益。
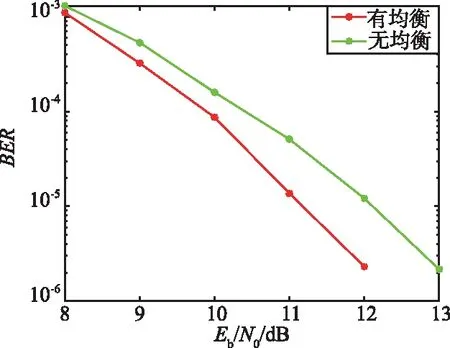
图6 起飞场景中误码率曲线
3.3 远航场景
远航场景中飞行器与地面距离较远,遥测链路可建模为双径模型,即一条直射路径和一条地面反射路径[5,18],由于接收端和发射端的距离较远,地面反射路径与直射路径相比延迟较大,假定多径信道模型如表3所示。

表3 远航场景信道模型
当时延为4 μs时,相当于16个符号周期的延迟,此种场景下的多径干扰是3个场景中最严重的,当第2条路径的发射系数较大(Γ2=0.79)时,误差收敛曲线如图7所示。由图7可以看出,在此场景使用CMA均衡,其剩余误差较大。

图7 远航场景中误差收敛曲线(Γ2=0.79)
远航场景中误差收敛曲线(Γ2=0.40)如图8所示。由图8可以看出,如果不对信道进行均衡,即使Eb/N0达到20 dB,解调的误码率大于0.5,说明此时同步和检测进程无法正常工作,而对其进行均衡后,随着信噪比的增长,误码率呈现下降的趋势,Eb/N0=23.5 dB时,BER在10-5左右。当第2条路径的反射系数较小(Γ2=0.4)时,其剩余误差小而稳定,均衡可以提升10.8~11 dB的信噪比增益(BER=10-5)。远航场景中误码率曲线如图9所示。

图8 远航场景中误差收敛曲线(Γ2=0.40)

图9 远航场景中误码率曲线
4 结束语
在遥测领域中,滑行场景、起飞场景和远航场景的通信链路通常会受到多径干扰,CMA均衡应用于SOQPSK-TG接收可以在不占用多余频带基础上,有效地缓解多径干扰带来的码间串扰,从而提升解调性能。在滑行场景中,均衡可以带来3~3.1 dB的性能增益;在起飞场景中,均衡给接收机带来0.9~1 dB的性能增益;而在远航场景中,当第2条路径衰减较小时Γ2=0.79,无均衡时接收机无法正常工作,而对其进行均衡后,同步和检测才能正常工作,当第2条路径衰减较大时Γ2=0.4,其剩余误差收敛较慢,但均衡可以给接收机带来10.8~11 dB的性能增益。
