通信时延下无人机群集系统分群控制算法
2022-04-21李成凤刘胜军张弘强沈家豪
李成凤,刘胜军,张弘强,沈家豪,武 凡
(绥化学院 电气工程学院,黑龙江 绥化 152001)
0 引言
近年来,无人机群集系统的协同控制已成为无人机研究领域的热点问题之一[1-4]。通常,群集系统的协同行为分为组群和分群2种形式[5],其中,组群表现为随机分布于某一区域内的UAV聚集成有序化单一群体协同运动,而分群表现为群集系统在各类分群诱因作用下分裂成若干子群的行为。
目前,组群方面已取得了丰硕的研究成果[6-9],而分群研究尚处于初步开展阶段,并主要集中于分群建模、分群可控性(子群数量、规模和速度等可控)和考虑实际信息约束的分群控制等方面[5]。文献[10-11]利用个体异构性实现分群,但子群需事先划分且无法扩展至同构系统。文献[12-13]利用固定时间稳定定理和结构平衡符号图理论,基于合作对抗网络实现了固定时间二分群,即分裂成速度大小相同、方向相反的2个子群。文献[14-15]提出了基于信息耦合度的自组织分群控制算法,但仅实现了对称刺激下等规模分群。文献[16]研究了基于等级C-S模型的多分群,但需内部作用参数满足条件且初始位置和速度满足有序关系才能实现分群。文献[17-18]基于多个虚拟领导者实现了满足子群规模需求和子群速度可控的多分群,但均仅限于子群期望速度恒定情况。此外,文献[17]中的分群策略不仅需要智能体与领导者的距离、领导者对应的子群规模,还需获得全局个体的子群选择信息;文献[18]除需领导者到智能体的单向通信,还需邻居智能体之间通信,才能实现满足要求的分群,且分群时过多破坏了群体的稳定结构,导致形成稳定子群所需时间较长。文献[19]研究了实际信息约束下群集系统分群问题,在忽略传感器探测时延而仅考虑通信时延的前提下,通过信息耦合度调节个体运动趋向性,并设计通信时延下的协同分群控制律,实现了外部刺激下的自发分裂,但仍局限于对称刺激下速度不可控的等规模分群。
针对上述分群控制研究中存在的问题,设计了一种通信时延下UAV群集系统分群控制算法。利用UAV自身位置信息和存在通信时延的期望子群规模和群目标运动信息,基于蚁群算法概率公式设计分群策略,以此实现子群数量和规模满足任务需求、群体结构和速度调整较小的分群;在此基础上将存在通信时延的群目标位置、速度和加速度信息融入协同分群控制律中,实现了通信时延下子群速度动态可控的分群运动,并通过理论分析和仿真实验验证了算法的稳定性和有效性。
1 UAV群集系统模型建立
1.1 UAV群集系统动力学模型
考虑二维水平空间中运动的UAV群集系统,群体中有N个无差别UAV和K(t)个群目标。UAVi的动力学模型为:
(1)
式中,xi,vi,ui∈R2分别为UAVi的位置、速度和控制输入。群目标k的动力学模型为:
(2)
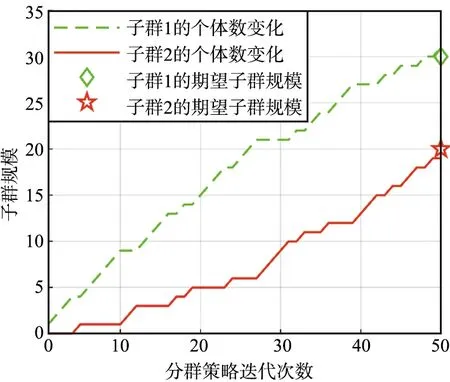
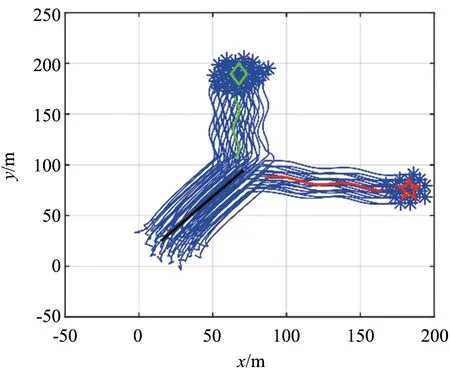
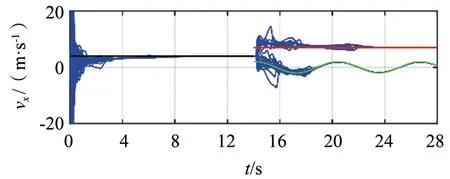
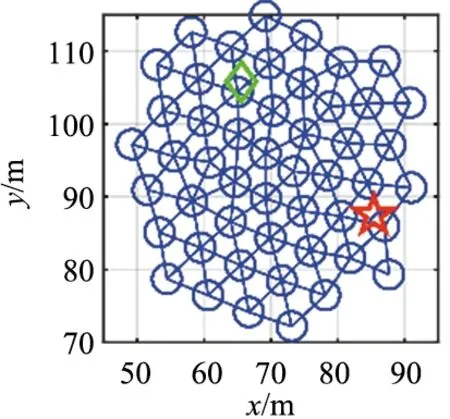
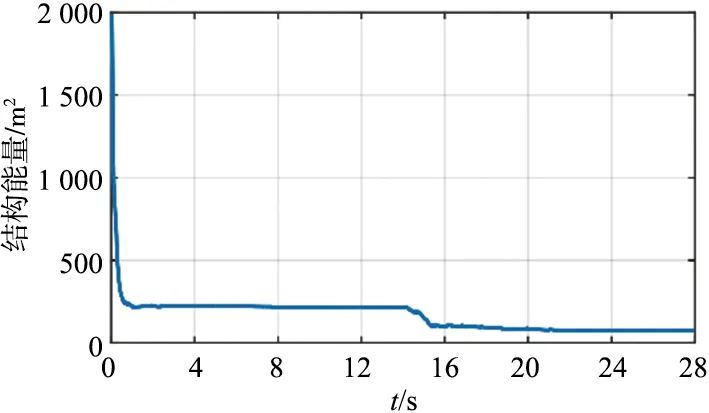
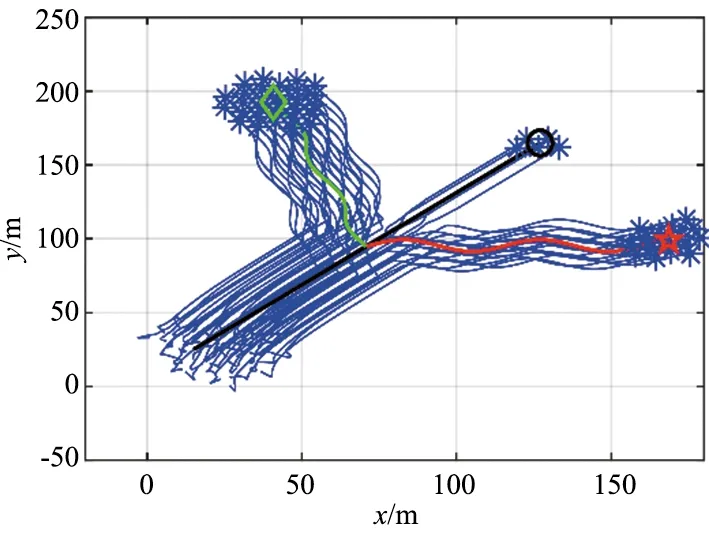
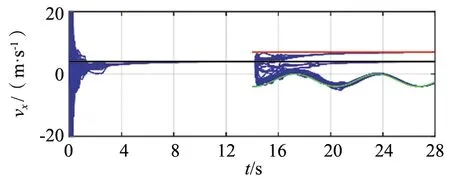
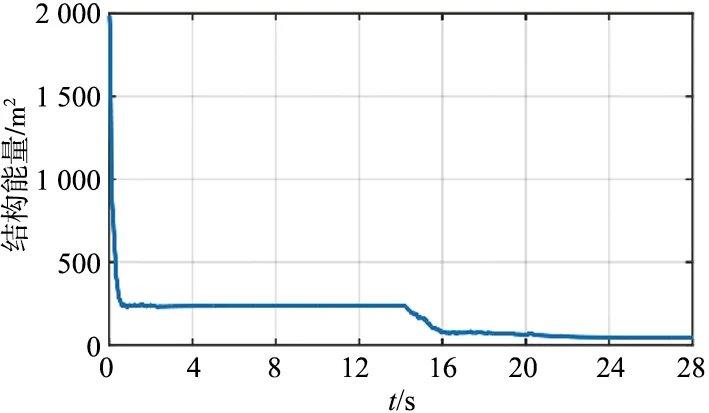
式中,xtk,vtk,ftk∈R2分别为群目标k的位置、速度和控制输入量。每个群目标均对应于一个子群,群目标数量、速度等参数设置取决于实际任务要求。当任务要求群集系统进行组群运动时,K(t)=1;当任务要求系统产生分群行为时,1 群集系统的信息交互网络由传感器探测网络和通信网络组成,其中传感器探测网络用于UAV间的位置和速度信息交互,通信网络用于群目标到UAV的单向通信。 传感器探测网络中UAVi的邻居集可定义为: Ni={j:‖xj-xi‖ (3) 式中,‖xj-xi‖为UAVi和j之间的欧式距离,简记为‖xji‖。当群集稳定时,邻居个体之间的距离为期望间距de。按个体所选择群目标是否相同,邻居集还可以表示为: (4) 基于上述模型,设计分群控制算法满足如下条件:① 可控分群,即群集系统分裂出的子群数量、规模和速度应基本满足任务需求;② 就近分群,即在优先满足子群规模需求前提下尽量不过多打乱已稳定的邻居结构,避免分群过程中过大的结构和速度调整,减少子群结构稳定和速度协同所需时间;③ 基于局部信息和任务信息分群,即每个UAV仅能获取自身及周围邻居的运动信息及单向通信所得存在时延的任务信息,不能获取全局UAV的信息,即不具备个体间通信和个体到群目标的通信;④ 协同分群,即没有集中分配和分布式协商,每个UAV依据自身位置信息及单向通信所得存在时延的任务信息进行自主分群决策。 在传统蚁群算法中,蚂蚁在路径选择过程中依据信息素浓度和启发信息选择下一步前进方向,选择概率为: (5) 由于群集系统分群时UAV选择群目标即加入对应子群的过程与蚁群选择路径过程相似,故借鉴式(5),利用个体自身位置信息和存在通信时延的任务信息设计出满足子群数量和规模需求且结构和速度调整较小的分群策略,群目标选择概率为: (6) 式中,Pi,k(t)为t时刻UAVi选择群目标k的概率;K(t-τ)为t时刻UAV接收到有通信时延的期望子群个数;τk(t-τ)为t时刻UAV接收到有通信时延的子群k期望规模,该子群规模项对应于式(5)的信息素浓度项,实现按规模需求分群;ηi,k(t-τ)=a1/dik(t-τ)+a2/θik(t-τ)为结构调整项,对应于式(5)的启发信息项,用于实现结构和速度调整较小的分群;dik(t-τ)为UAVi当前时刻的位置xi(t)与存在通信时延的群目标k的位置xtk(t-τ)之间的欧式距离;θik(t-τ)为UAVi相对于群目标k存在时延的航向的方位,即UAVi与群目标k存在通信时延的相对位置向量与群目标速度vtk(t-τ)之间的夹角,当群目标位置不重合时,a1=1,a2=0,当目标位置重合时,a1=0,a2=1;α和β与式(5)中的相应参数含义相同,分别体现子群规模项和结构调整项的重要程度。 在群目标数大于1时,UAVi按照式(6)计算选择概率并利用轮盘赌选择法来确定加入群目标所对应的子群,具体步骤如下: 步骤1:S=0,k=1,r=random(0,1); 步骤2:按照式(6)计算Pi,k(t); 步骤3:计算累积概率S=S+Pi,k(t); 步骤4:若r 步骤5:否则,k=k+1,转到步骤2。 由所设计的分群策略可知,在进行分群时,每个UAV仅利用了自身当前时刻的位置信息和单向通信所得存在时延的子群信息,不需集中分配或分布式协商,也不需UAV之间通信或UAV向群目标返回任何信息,即可实现满足子群数量、规模需求且结构和速度调整较小的分群效果。 由于不考虑传感器探测时延,仅考虑通信时延,故仅是广播的信息存在时延,其余信息无延时。根据所设计的基于蚁群算法的协同分群策略设计速度动态可控的分群控制律为: (7) 可见,控制器包含3个组成部分,其中: (8) 式中,fr(‖xji‖)为同子群邻居个体距离过近时的排斥函数;fa(‖xji‖)为同子群邻居个体距离过远时的吸引函数;f′r(‖xji‖)为不同子群邻居个体间的排斥函数。 定理:对于式(1)所描述的UAV群集系统,假设通信时延均为定常时延τ,系统初始能量为一个有限值,则在控制输入式(7)的作用下,可以得到如下结论:① 各子群能够渐近地形成稳定群集;② 各子群中所有UAV的速度动态可控;③ 当子群稳定时,其中任意2个不同UAV的间距保持恒定;④ 群集过程中,所有UAV之间不发生碰撞。 针对子群k,定义系统的能量为: (9) 对式(9)求时间的导数可得: (10) (11) (12) Ω={(xij,vi)|Qk(t)≤Qk(0)}, (13) 根据LaSalle不变性原理可确定子群k中的所有UAV起始于Ω的轨迹将会收敛于最大不变集: (14) 由式(12)可以得出: (15) vi=vtk(t-τ),i=1,2,…,τk。 (16) 由此可知,在存在通信时延情况下,子群的速度仍能受速度时变的群目标控制且渐近一致,若群目标速度恒定时,vi=vtk(t-τ)=vtk,结论②得证。 子群k中任2个UAVj和i间的距离平方为: (17) 对式(17)求时间的导数可以得出: (18) 由式(16)可知vj=vi=vtk(t-τ),故d‖xji‖2/dt=0,进而可得‖xji‖为恒定值,结论③得证。 结论④可通过反证法证明。假设整个群集运动过程中,在t1时至少有2个UAV发生碰撞,则: 即Q(0)>Q(t1)≥F(0),这一结论与定理中系统初始能量Q(0) 为验证本文所设计的通信时延下UAV群集系统分群控制方法的可行性和有效性,选取50个UAV组成的群集系统在Matlab下进行仿真实验。在仿真实验中,分别考虑了群目标位置重合和不重合且群目标速度、期望子群规模均不同的2个分群任务。 分群任务1参数设置:初始状态下UAV随机分布在40 m×40 m内,初始速度大小随机分布在0~1 m/s内,探测半径R=8.4 m,通信时延τ=0.2 s,期望间距de=7 m,仿真时间28 s,步长为0.02 s。因本文主要研究群集系统完成组群后如何进行协同分群,故仿真中的分群时刻可以是组群完成后的任意时刻,按此原则可设置分群任务为在[0,14)s时,群体中仅有群目标1,群集系统先进行组群,从14 s开始,群体中有2个群目标,群集系统进行分群。组群时,群目标1的初始位置在40 m×40 m矩形区域内随机给定,期望的群体速度为vt1=[4,5]Tm/s;分群时,2个群目标速度分别为vt1=[2sin(t),6]m/s,vt2=[7,-1+2sin(t)]Tm/s,在保证速度方向不交叉前提下,初始位置在距离原群目标1当前位置40 m范围内不重合地随机给定,子群期望规模在满足总和为50条件下随机给定。α=6,β=5,令dji=‖xji‖-de,Rji=‖xji‖-R,参考文献[16]选择相互作用力: 此外,为进一步判断群体是否已形成稳定结构以及分群中的结构调整大小,建立结构势能函数为: 任务1的仿真结果如图1~图4所示。 图1 子群规模变化曲线(任务1) 由图1可以看出,分裂的子群规模分别为31和19,基本满足期望规模30和20的要求,即个体只需根据单向通信所得有时延的任务信息及自身位置信息,按照所设计的基于蚁群算法的分群策略,就能够实现满足子群规模需求的分群,而不需要集中分配、分布式协商或额外增加个体间的通信能力。 图2中蓝线为群体运动轨迹,黑线为组群时群目标1的轨迹,红线、绿线分别为分群时群目标1和2的轨迹,“*”为UAV终点,“◇”和“☆”分别为群目标1和2的终点。 图2 群体运行轨迹(任务1) 由图2可以看出,群体在最初一个群目标1的导航作用下完成了组群,在群目标1消失并出现另外2个群目标后完成了协同分群。 图3中蓝线为UAV速度分量曲线,黑线为组群时群目标1的速度分量曲线,绿线和红线分别为分群时群目标1和2的速度分量曲线。 (a)x轴方向 由图中可以看出,在有通信时延的情况下,组群时群体的速度最终收敛至群目标1的恒定速度;分群时,虽然由于通信时延导致分群响应时间滞后了0.2 s,但2个子群中个体速度最终仍趋近于各自对应的群目标时变速度,且分群时群体速度调整较小。 图4中“◇”和“☆”分别为群目标1和2的位置,“○”为UAV位置,其中连线表示UAV的邻居关系。 (a)14 s 由图4可以看出,14 s时群体已经处于组群后的稳定群集结构,并出现2个群目标引导分群,14.6 s时有少量个体相互分离,15 s时有更多个体相互分离,15.6 s时群体分裂完成,形成跟随不同群目标的2个子群;从分群过程中群体结构变化可以看出,在设计的基于蚁群算法的协同分群控制作用下,实现了按2个群目标的期望子群规模就近分群,而没有过多地打乱已稳定的邻居结构。 分群任务1的群体结构能量图如图5所示。 图5 群体结构能量图(任务1) 由图5可以看出,在0~14 s时,群体结构能量在逐渐减小并在8 s时达到稳定状态,即此时所有个体在一个群目标的导航作用下,形成了期望的稳定群集结构;在14 s时开始的分群过程中,群体结构能量并未出现突增,由此进一步说明所设计的协同分群策略可避免分群过程中过大的群体结构调整;22 s时,群体结构能量达到稳定状态,即在所设计的基于蚁群算法的协同分群控制器作用下,使各个子群均形成期望的稳定群体结构。 为进一步验证算法的有效性,进行了分群任务2的仿真实验。任务2参数设置:组群时,群目标1的速度为vt1=[5,4]Tm/s;分群时,期望子群数量为3个,期望子群规模分别为5,15,30个,群目标1保持原有运动规律,群目标2和3的初始位置与群目标1当前位置重合,速度分别为vt1=[2-2sin(t),7]Tm/s,vt2=[7,4sin(t)]Tm/s,其余参数设置同分群任务1。这里只给出群体运行轨迹、速度收敛曲线和群体结构能量图,分群任务2的实验结果如图6~图8所示。 图6 群体运行轨迹(任务2) (a)x轴方向 图8 群体结构能量图(任务2) 从结果可知,虽然分群时群目标的数量、位置、速度及子群期望规模均发生了改变,但在通信时延下,按设计的基于蚁群算法的分群控制算法仍能使群集系统实现子群数量、规模和速度均可控且结构和速度调整较小的分群效果。 本文研究了通信时延下UAV群集系统分群控制问题,设计了一种基于蚁群算法的协同分群控制算法。该算法仅利用有通信时延的任务信息及自身位置信息设计分群策略,实现了满足期望子群数量和规模需求的分群;通过在分群选择式(9)中引入结构调整项,避免了分群过程中过大的群体结构和速度调整,加快了子群结构稳定和速度协同过程;在有通信时延的信息约束下,通过在分群控制算法中融入存在通信时延的群目标运动信息,使群集系统能够根据任务需要进行协同分群,形成稳定且速度动态可控的子群。理论分析和实验结果表明,在通信时延约束下,所设计算法能够使群集系统实现结构和速度调整较小的可控分群运动。1.2 UAV群集系统信息交互模型


2 通信时延下的分群控制算法
2.1 通信时延下基于蚁群算法的分群策略
2.2 通信时延下基于蚁群算法的分群控制算法

2.3 稳定性分析





3 仿真实验
4 结束语
