通过机器学习实现基于摩擦纳米发电机的自驱动智能传感及其应用*
2022-04-15张嘉伟姚鸿博张远征蒋伟博吴永辉张亚菊敖天勇郑海务
张嘉伟 姚鸿博 张远征 蒋伟博 吴永辉 张亚菊 敖天勇 郑海务†
1) (河南大学物理与电子学院,开封 475001)
2) (武汉大学物理科学与技术学院,人工微结构教育部重点实验室,武汉 430072)
3) (河南大学人工智能学院,郑州 475001)
在物联网时代,如何开发一种可持续供电、部署方便且使用灵活的智能传感器系统成为了亟待解决的难题.以麦克斯韦位移电流作为驱动力的摩擦纳米发电机(triboelectric nanogenerator,TENG)可直接将机械刺激转化为电信号,因此可作为自驱动传感器使用.基于TENG 的传感器拥有结构简单、瞬时功率密度高等优点,为构建智能传感器系统提供了重要手段.同时,机器学习作为一种成本低、开发周期短、数据处理能力和预测能力强的技术,对TENG 产生的大量电学信号处理效果显著.本文梳理了基于TENG 的传感器系统通过采用机器学习技术进行信号处理和智能识别的最新研究进展,从交通安全、环境监测、信息安全、人机交互和健康运动检测等角度出发,概述了该研究方向的技术特点与研究现状.最后,深入讨论了该领域当前存在的挑战和未来的发展趋势,并分析了未来如何改进以期开拓更广阔的应用空间.我们相信机器学习技术与TENG 传感器的结合将推动未来智能传感器网络的快速发展.
1 引言
近年来,随着物联网的快速发展,人类对信息的存储、处理及使用方法的需求日益凸显.2020年5 月7 日,工信部发布工信厅通信[2020]25 号文,即《工业和信息化部办公厅关于深入推进移动物联网全面发展的通知》.通知表示,移动物联网(基于蜂窝移动通信网络的物联网技术和应用)是新型基础设施的重要组成部分.贯彻落实党中央、国务院关于加快5G、物联网等新型基础设施建设和应用的决策部署,加速传统产业数字化转型,有力支撑制造强国和网络强国建设[1].物联网的核心—无线传感器网络由数十亿个传感器构成,这些传感器分布广泛,可以帮助人们监测周围环境和人体健康状态.而随着物联网的推广应用,无线传感器节点数量迅速增加,传感器的电源供应和使用灵活性等问题就变得越来越突出,这直接导致了传统传感器网络出现了使用寿命短、节点部署困难、可维护性差等问题.未来,将有超过300 亿个传感器连接到物联网[2].但是这些传感器的总功耗高达1.2 亿瓦[3],相当于每小时燃烧约15 吨标准煤(根据联合国标准,1 千克煤热值为6880 kcal).三峡电站2020 年发电量为1118 亿千瓦时.传感器网络的功耗相当于34 个以上的电站.传统的传感器由电网和电池供电,能源供应将面临巨大的挑战,而且未来的物联网对传感器的需求还在不断增加.因此,一种不需要电源的自供电传感器成为该问题最有前景且可持续的解决方案.2012 年,王中林院士及其团队[4]发明出摩擦纳米发电机(triboelectric nanogenerator,TENG).TENG 是一种小型电子设备,使用麦克斯韦位移电流作为驱动力,能将环境中可用的机械能转化为电能[5].按照工作模式的不同,TENG 可以分为垂直接触-分离模式、水平滑动式、单电极模式和独立层模式[6].TENG 作为传感器可从外部环境中的水波、振动、雨滴、声音中获取有用的信息[7].其独特的工作原理也使TENG 可以有效地获取生物力学能量信息,包括身体运动、呼吸和心跳.近年来,TENG 凭借着成本低、结构多样、输出稳定、能量转换效率高、环境适应能力强和生态友好等优点吸引了广泛的关注.TENG 的研究方向可以概括为两个——作为储能设备和作为信号传输设备.前者用环保的方式产生更高、更持久、更稳定的电能.后者将发电机本身作为一种自供电传感器用来获取信息.与经典电磁发电机相比,TENG 在低频下的高效能是同类技术无法比拟的.同时它也可以作为自驱动传感器来感知由机械触发所产生的静态和动态过程的信息.TENG 传感器类型多种多样,应用范围广泛,有自驱动压强传感器、自驱动声音传感器、自驱动加速度传感器、自驱动温度传感器、自驱动湿度传感器、自驱动气体感应传感器等.这些自驱动传感器致力于部分替代传统的传感器,以达到节约能源、节省功耗的目的.所以,TENG 作为一种新型传感器技术具有更加广阔的应用前景.
近年来,机器学习尤其是深度学习逐渐成为物联网和传感器领域的研究热点和主流发展方向,大数据和机器学习技术与TENG 传感器数据处理相结合为科研人员提供了一个新思路.机器学习是由Arthur Samuel 在1959 年提出的,并已广泛应用于计算机视觉、一般游戏、经济学、数据挖掘和生物信息学等领域[8].人工智能是一个跨学科的研究领域.近年来,随着人工智能和机器学习理论的完善和工具链的扩充,越来越多的专家借助这一强大的工具在其研究领域中不断取得新的成果.由于机器学习的资源和工具丰富且易于获取,自身拥有更加高效的数据处理能力,能使传感器智能化,并节省测试时间和成本,较之传统传感器,由TENG传感器所产生的数据更适合采用机器学习技术进行处理和分析,因此机器学习已渐渐地出现在TENG的研究领域中.在TENG 传感器应用案例中,已经实现了方向盘驱动行为检测、液体泄漏检测、沉积物检测、击键识别、文本识别等各种功能应用.图1 展示了基于TENG 的传感器和机器学习方法构成的多功能自驱动智能系统及其应用场景.本文主要阐述大数据和机器学习在TENG 传感器领域中的基本操作步骤和应用方式,总结了近年来各机器学习算法在TENG 传感器领域的应用案例,并讨论了在研究和使用过程中需要改进的地方.这项工作致力于介绍机器学习的理论背景,促进其和TENG 传感器技术的结合和应用,并给各研究人员在本领域的开拓过程中提供新视角和新思路.NG 传感器技术的结合和应用,并给各研究人员在本领域的开拓过程中提供新视角和新思路.
2 摩擦纳米发电机(TENG)
2.1 摩擦电效应的研究
摩擦电效应在日常生活中无处不在,当两种特定材料的物体接触后就会产生摩擦电.早在2600多年前的古希腊时期,人们就开始对摩擦起电现象进行研究.摩擦电产生的静电荷会导致起火、粉尘爆炸、电子元件损坏等后果,在工业生产中长期被认为是一种危害而忽视其作为一种能源的可能.王中林院士及其团队[9]将这种摩擦电效应和静电感应相结合,于2012 年首次提出TENG,TENG 基于接触起电(contact-electrification,CE)和静电感应,对日常生活中普遍存在但被忽视的广泛分布且不规则的机械能,如机械振动、人体运动、风和水波等进行收集并有效利用(见图1).最吸引人的是,TENG 拥有转换效率高(TENG 当前的功率密度已经达到了 313 W/m2,其体积能量密度已经达到了 490 kW/m3,当前最新开发的TENG 的机械能转换效率已经达到了约85%[10])、成本低、结构简单、重量轻等优点.
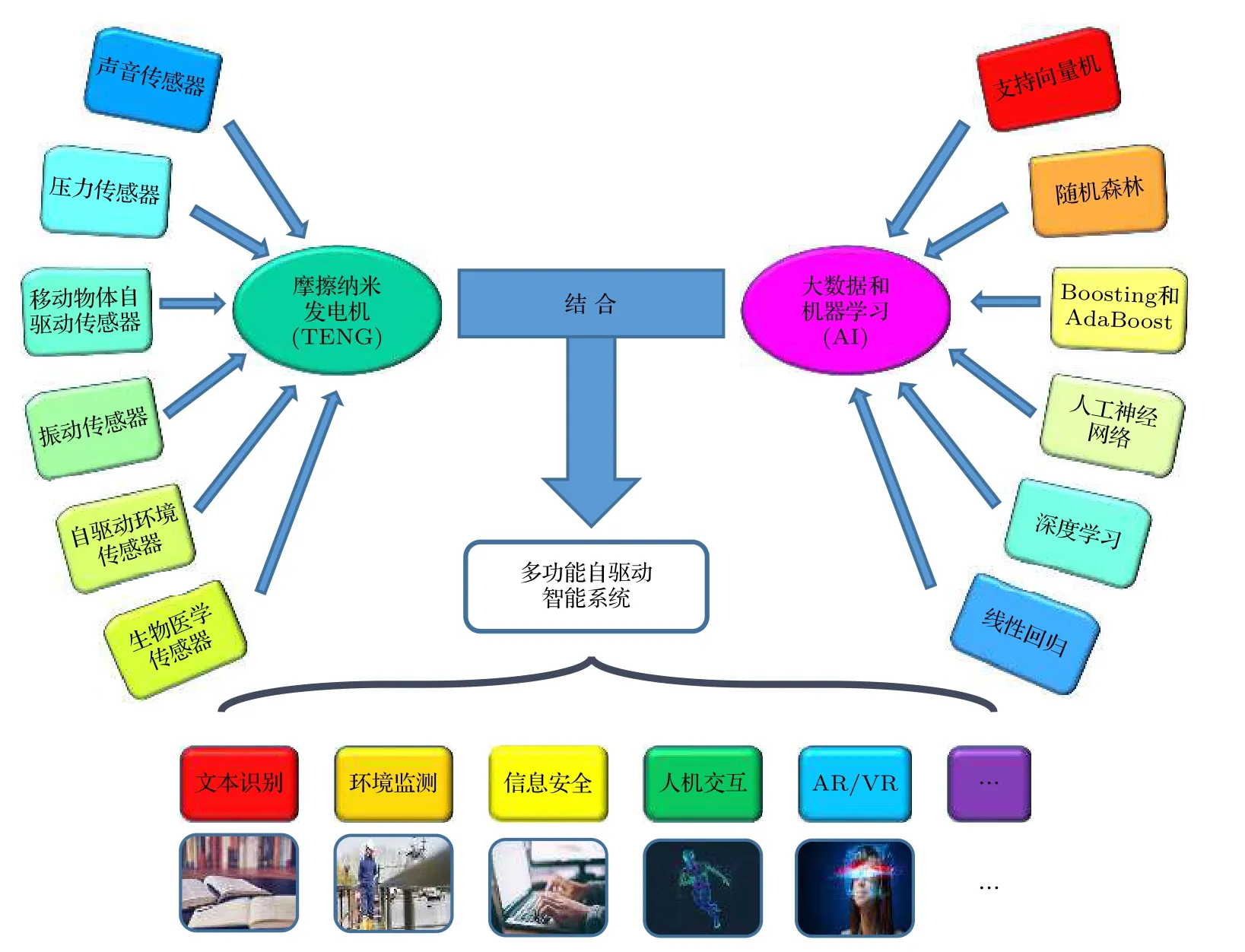
图1 基于TENG 的多功能智能传感系统的结构示意图和主要功能展示Fig.1.Structure diagram of the multifunctional intelligent sensor system based on TENG and its main function display.
对摩擦起电的研究尽管已有2600 多年的历史,但对其机理仍然争论不休.最近,王中林院士和其团队[11]发现,固体与固体之间的CE 主要由电子转移引起,金属和电介质之间的CE 可以由其表面状态模型和费米能级模型进行描述.经过实验发现,在两种材料的原子间距离大于键长时往往会互相吸引(图2(a));而当原子间距离小于键长时就会发生CE (图2(b)).王中林及其团队[11]由此创新性地提出了摩擦起电过程中的电子迁跃模型(Wang transition for CE).该模型说明了当两种材料在原子级接触之前电子云处于分离状态(图2(c)),而后当两个原子受外力挤压进入斥力区时,两个原子之间势垒降低,并且两者的电子云开始重叠,随后电子就会在两个原子之间发生电子跃迁(图2(d)).一般认为该模型是描述两种任意材料摩擦起电现象的通用模型.虽然该模型解释了固体之间摩擦起电的现象,但液体和固体之间的摩擦起电现象用电子转移模型来解释则一直存在争议.最近,Li 等[12]提出一种用于解释聚合物-聚合物和聚合物-液体之间电子转移原理的理论机制.在这个简化的机制中,电子云表示电子出现在原子核之外的概率.当原子核的得电子能力较弱时,电子云可以占据较大的范围.相反,当原子核具有较强的得电子能力时,表现出较小的电子云.例如 H2O 电子云范围较大,而聚四氟乙烯(PTFE)电子云范围较小,在这两者接触的过程中,它们的电子云部分重叠,发生电子转移;当它们分开时,H2O 的电子云变小而PTFE的电子云变大,该工作阐明了液体-固体之间的摩擦起电现象同样可以用电子转移模型来解释.同样地,Nie 等[13]用分子间电子云理论来解释PTFE和液滴接触时电子从水分子转移到PTFE 的现象.该工作假设氧原子的核外电子在水分子中形成电子云,且原子可以作为一种势阱.同时,根据该团队之前的研究,他们假设PTFE表面的最低未占分子轨道(LUMO)可以接收CE 过程中的电子.在两个材料接触之前,电子由于局部的势阱捕获效应而不能转移.当PTFE 与水分子接触时,电子从水分子的氧原子跃迁到PTFE 的LUMO 上,这个电子转移过程与电子从高能跃迁到低能态有关.当两个材料分离之后,如果能量波动低于PTFE 的势垒Ep,大部分转移到PTFE 的电子将会继续保存在PTFE 上.因此,CE 使PTFE 带负电,水分子带正电.该工作为液固之间CE 的电子转移模型提供了证据.
2.2 TENG 的原理和4 种工作模式
TENG 的基本工作原理是摩擦起电和静电感应的结合.摩擦起电提供静态极化电荷,而静电感应是将机械能转化为电能的关键因素.为了对TENG 的原理进行更细致的理论描述,王中林院士[14]在2017 年将麦克斯韦位移电流修正为

在这里D是位移向量,第一项是由时变电场和感应介质极化所产生的位移电流,而第二项是由王中林院士增加的附加项,PS是由机械触发产生的表面静电荷引起的极化密度,非外加电场(例如摩擦电荷、压电电荷等)而导致的位移电流,它是纳米发电机的根本原理.
2012 年TENG 被首次提出,目前TENG 存在4 种不同的工作模式,即垂直接触-分离模式、水平滑动模式、单电极模式、独立层模式,如图3 所示.
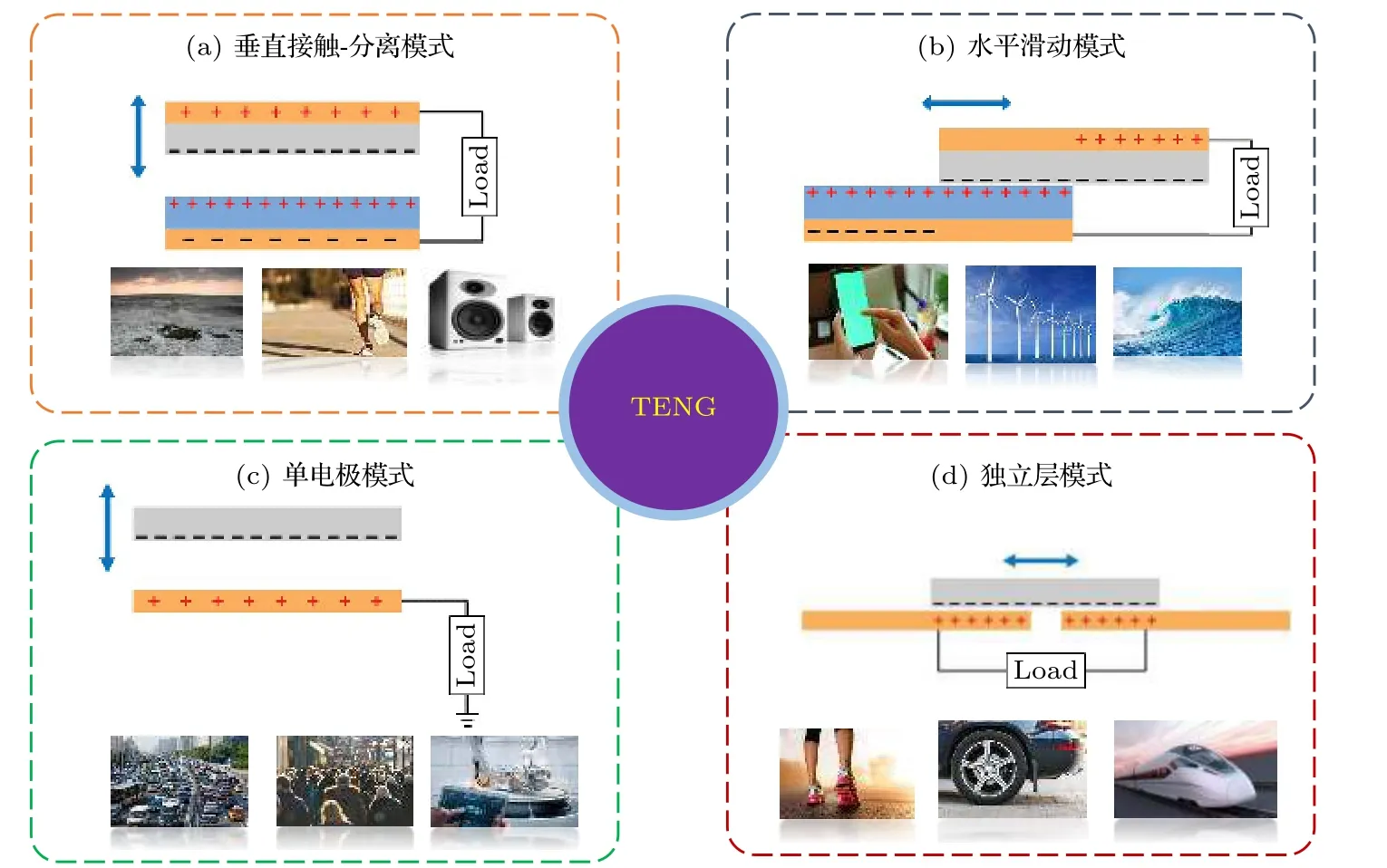
图3 TENG 的4 种工作模式及其应用 (a) 垂直接触-分离模式;(b)水平滑动模式;(c) 单电极模式;(d)独立层模式[26]Fig.3.Four working modes of TENG and applications:(a) Vertical contact-separation (CS) mode;(b) lateral-sliding (LS) mode;(c) single-electrode (SE) mode;(d) freestanding triboelectric-layer(FT) mode[26].
1) 垂直接触-分离模式
垂直接触-分离模式是最早的TENG 模型[15],该TENG 主要分类两种类型:电介质对电介质和导体对电介质.第一个TENG 采用的就是该设计,它由聚酯薄膜(PET)和聚酰亚胺薄膜(Kapton)组成,背面涂有电极,在外力作用下,两个摩擦层之间的距离会发生变化.当两个摩擦层彼此接触之后,由于摩擦起电,两个摩擦层内表面产生密度相等但极性相反的静电荷,由此产生交流电输出.以这种模式实现的TENG 传感器结构利用短程循环运动(例如周期性的振动和冲击)在紧密接触状态和完全分离状态之间有效切换,并产生信号输出.垂直接触-分离模式不但适用于固体与固体之间,甚至可以适用于固体和液体[13]以及液体和液体之间[16].目前已经开发实现的案例有拱形结构[17]、弹簧结构[18]等.使用这种结构的传感器有瞬时功率高、结构设计简单等优势.
2) 水平滑动模式
水平滑动模式基于面内电荷分离机制[19],滑动层也有两种类型:电介质对电介质;导体对电介质.两个金属电极与两个电介质层结合,该TENG利用摩擦层平行方向的相对运动产生摩擦电荷,当两层分开时,上层的下表面和下层的上表面在非重叠区域带有相反的电荷,分别在两个电极处感应出相反的电荷并产生交流电输出.与垂直接触-分离模式相比,两个表面通过相对滑动所产生的摩擦电荷更为丰富,并且在传感器制作过程中,可以通过给滑动层制作光栅结构[20]来提高分离-接触的频次,从而实现更高效的电荷转移过程,进而提高功率输出.目前采用这种结构的案例有平面运动式[21]、圆盘旋转式[22]、圆柱旋转式[23]等.
3) 单电极模式
传统的垂直接触-分离模式TENG和水平滑动模式TENG 要求将电极和导线附着在设备的运动部件上,这种结构限制了TENG 的适用性.而单电极TENG和独立层模式TENG 克服了这个缺点,[24]单电极模式只有一个电极连接到摩擦层,另一个电极作为参考端,可以放置在空间任何位置,甚至可以放置在地面.其工作模式和垂直接触-分离模式TENG和水平滑动模式TENG 类似,该TENG从自由移动的物体中收集能量,无需附加其他导体,例如手打字、行走等,应用非常广泛,并且单电极模式TENG 还特别适合作为自供电有源传感器来检测任何带电物体.
4) 独立层模式
单电极模式TENG 因为受到其主电极的静电屏蔽作用限制,最大电荷转移效率只能达到50%[24].为了克服这个缺点,设计了一种固定电极的TENG,即独立层模式TENG[10].独立层模式是在单电极的基础上开发得到的,其使用一对对称电极,不以地面为参考,当物体自由移动时,会在两个电极处产生非对称的摩擦电荷并输出至负载.独立层模式兼顾了单电极模式的优点,可以从任何运动物体中收集机械能,还没有静电屏蔽的问题.这种模式一个重要的实现案例是用于定量振幅测量的自供电主动振动传感器[25].
3 基于机器学习技术的TENG 传感器的一般工作模式
目前,TENG 最主要的用途有两个:作为传感器的能量来源和作为自驱动传感器,目前基于TENG的传感器有声音传感器、压力传感器、移动物体自驱动传感器、振动传感器、自驱动环境传感器和生物医学传感器.可采集到的数据一般有音频信息、图像信息、图形信息、振幅信息、空间位置信息、温度信息和频率信息等,数据来源复杂,且形式多样.随着机器学习技术的发展日新月异,越来越多的人使用机器学习技术来处理海量且复杂的传感器数据.机器学习是人工智能的一个分支,是一种建立自动学习模型并使用大量数据来不断优化模型,然后在算法的指导下做出合理预测的技术.机器学习工作流程可以简单地描述为数据预处理、特征提取、建模、验证和输出结果.一般来说,使用机器学习技术进行训练和识别,一般要经历如图4 所示的5 个阶段,即数据预处理、特征提取、选择合适的机器学习方法并建立模型、结果验证.使用机器学习方法处理基于TENG 传感器产生的数据的一般过程如图5 所示,首先传感器收集数据并传输到数据中心进行存储和管理,然后用户通过控制中心将选择好的传感器数据发送至机器学习模型,在模型的数据预处理阶段对数据进行分类,一般分为多元时间序列和多元空间数据.紧接着将已分类的数据进行特征提取和归一化,并使用机器学习方法进行分析和预测.最后由机器学习模型对结果进行验证和评估,用户也可以通过控制中心将结果进行存储和展示.

图4 机器学习的基本工作流程Fig.4.Basic workflow of machine learning.

图5 从基于TENG 的传感器收集数据并推送至机器学习模型进行计算分析的过程.数据在数据中心存储和管理,用户可以从控制中心与数据中心进行交互.在预处理阶段将数据分为多元时间序列和多元空间数据,接着输入机器学习模型分析并做出预测,最后对结果进行验证和评估Fig.5.Process of collecting data from TENG-based sensors and pushing it to the machine learning model for computational analysis.Data is stored and managed in the data center.Users can interact with the data center from the control center.In the preprocessing stage,the data is divided into multivariate time series and multivariate spatial data,and then input into the machine.The machine learns the model and analyzes and makes predictions,and finally verifies and evaluates the results.
3.1 数据预处理
数据预处理表示数据在进行训练学习之前,需要根据机器学习算法的需求对数据进行格式上的统一.数据预处理的方法主要包括去除唯一属性、处理缺失值、属性编码、数据标准化、特征选择、主成分分析等.良好的数据预处理可以提高数据质量,使得模型能够更好地学习数据,进而决定模型的预测和泛化能力的好坏.
3.2 特征提取
完成数据采集和归一化后,应提取合适的特征来预测目标,称为特征选取阶段.特征提取是从一个初始测量的资料集合中开始,建构出富含有效信息而且不冗余的导出值,这些导出值被称为特征值.它可以帮助构建后续的学习归纳过程,特征提取是一个降低维度的步骤,初始的资料集合被降到更容易管理的族群(特征)以便于学习,同时保持描述原始资料集的精准性与完整性.该阶段至关重要,有时直接影响整个机器学习的性能.
3.3 机器学习方法
有了合适且足够的数据和特征,就可以依据需求构建一个分析数据的模型.建模的步骤包括选择合适的算法、从训练的数据中进行训练、并做出准确的预测.机器学习方法可分为监督学习、无监督学习、半监督学习和强化学习.监督学习也称为“有老师的学习”,即训练数据的相应输出已经被标记.相比之下,无监督学习中训练数据的相应输出是未标记的.对于半监督学习,对部分训练数据进行标记,其余数据不进行标记;未标记数据的数量通常远远超过标记数据的数量.在强化学习中,不是向模型指定如何产生正确的动作,而是使用环境提供的强化信号来评估所产生的动作的质量,并改进适应环境的策略.具体的机器学习方法有支持向量机(support vector machine,SVM)[27]、人工神经网络(artificial neural network,ANN)[28]、卷积神经网络(convolutional neural network,CNN)[29]、长短期记忆(long short-term memory,LSTM)[30]、深度信念网络(deep belief network,DBN)[31,32]等.机器学习算法数量众多,每种算法都有其独特的优点和适用范围,例如SVM,它是统计学习领域中一个代表性算法,将问题归结为线性可分的经典解问题,适用于解决中小数据规模、非线性、高维模式识别方面的问题;ANN 优点是拥有很强的泛化能力和非线性映射能力,适用于对信息量少的系统进行模型处理;CNN 优点是具有良好的容错能力、并行处理能力和自学习能力,适用于处理环境信息复杂、背景知识不清楚、推理规则不明确情况下的问题;LSTM 是一种根据时间序列或字符序列自我调用的特殊神经网络,能够更好地存储和访问信息.针对不同的应用场合和不同的数据集,可以根据传感器的信号特点选择更合适的方法或者综合不同方法的优势构建出专用的学习模型.
3.4 结果验证
验证数据集是用于调整分类器超参数(即体系结构)的参考数据集.例如神经网络的超参数一般包括每层中隐藏单元的数量以及测试集(应遵循与训练数据集相同的概率分布).为了避免过度拟合,当需要调整任何分类参数时,除了训练和测试数据集外,还必须有一个验证数据集.例如,为了寻求最适合该问题的分类器,使用训练数据集来训练候选算法,使用验证数据集来比较其性能并决定采用哪种算法,最后使用测试数据集来进行测试.获得诸如准确度、灵敏度、特异性、f度量等性能特征.k折交叉验证是一种常见的验证方法.k折交叉验证是指将原始数据随机分成k个大小相似的互斥子集,每个子集尽可能保持数据分布的一致性.这样,每次使用k—1 个子集的并集进行模型训练,同时保留一个子集进行模型验证,这样就可获得k组训练/测试集,从而可进行k次训练和测试,最终返回的是折k个测试结果的均值.k折交叉验证的一个缺点是,它需要构建k个模型,这对大数据集来说非常耗时.另一种在由TENG 驱动的传感器中使用的验证方法是留一法,与k折交叉验证略有不同,留一法不受随机样本划分方式的影响.假设数据集d中包含m个样本,令k=m,则m个样本只有唯一的方式划分为m个子集——每个子集包含一个样本.留一法使用的训练集与初始数据集相比只少了一个样本,这就使得在绝大多数情况下,留一法中被实际评估的模型与期望评估的用d训练出的模型很相似.因此,留一法的评估结果往往被认为比较准确.然而,留一法也有其缺陷:在传感器产生的数据集比较大时,训练m个模型的计算开销可能是难以忍受的(例如数据集包含一百万个样本,则需训练一百万个模型),而这还是在未考虑算法调参的情况下.所以对数据集较大的工作来说,例如道路声音识别,使用留一法往往难以达到期望的目的.另一种用来验证模型的方法是重复学习测试(repeated learning test,RLT)交叉验证法.与留一法相反,RLT 交叉验证将数据集的一部分进行验证.因此,计算复杂度大大降低.然而,模型验证的最佳数据量很难确定,测试集通常必须根据实际情况进行选择.自助交叉验证是一种基于多重采样的泛化误差方法.该方法能有效降低k折交叉验证的方差,然而,这样会造成计算成本增加,在一些实时性要求较高的工作,例如车辆信息实时检测中很难获得理想的结果[32].
4 基于机器学习技术的TENG 传感器的应用
2020 年5 月的全国两会上,中国《政府工作报告》也明确提出:“加强新型基础设施建设,发展新一代信息网络,拓展5G 应用,建设充电桩,推广新能源汽车,激发新消费需求,助力产业升级.”至此,新型基础设施建设(以下简称新基建)开始快速推进.而5G 作为“新基建”的“领头羊”,将直接驱动物联网等相关行业的快速发展.物联网、大数据、云计算乃至智慧城市的各种技术,都依赖于传感器提供的基础功能.作为“感知世界”之基,传感器已成为一个地区乃至一个国家科技发展水平的重要标志.
目前传感器的能源供给以电池为主,然而,电池的管理回收是一项极其困难的任务,电池报废后所遗留的有害化学物质已经对环境产生了重大威胁.针对传感器的能源供给问题和环境问题,以TENG 为代表的微纳能源研究进展迅速,为物联网的发展提供了新的能源技术,有望解决物联网时代小型器件的自供能问题.根据总部位于英国剑桥,专门提供独立市场调查与商业资讯的idtechex公司预测:基于TENG 的微纳能源和自驱动传感器将在2027 年拥有4 亿美元的市场价值,商业前景十分广阔.这其中TENG 具有显著的优势,例如:不会产生污染环境的废料;能收集的能量来源广泛;制造工艺和流程简单;对产生的电能可以精确控制等.因此,TENG 在物联网、环境检测、自驱动传感器和可驱动便携式电子产品等领域有极大的研究价值和广阔的应用前景.据《Emerging nanogenerator technology in china:a review and forecast using integrating bibliometrics,patent analysis and technology roadmapping methods》报告显示,自2013 年以来,各种纳米发电机技术快速兴起,且中国目前处于该领域的领先地位,并且该报告也展示了纳米发电机产业在中国未来发展的路线图,如图6 所示[33].本文根据TENG 在不同领域中的应用,将其分为交通安全、环境监测、信息安全、人机交互和健康监测等5 个方面进行了分类与梳理.
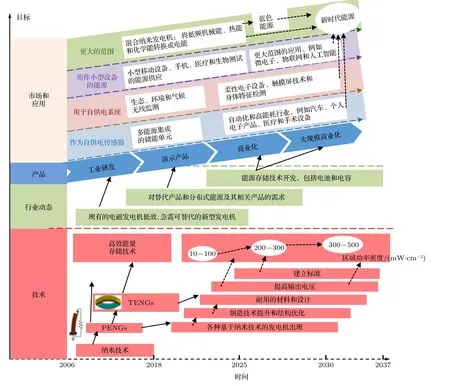
图6 纳米发电机产业在中国未来发展的路线图Fig.6.Roadmap for the future development of the nano-generator industry in China.
4.1 交通安全
全世界每天有3500 多人死于交通事故.在交通事故的所有原因中,人类驾驶员的不当行为占到了80%以上[34].在人车交互过程中,方向盘、制动器、油门踏板等操纵动作将驾驶员的大部分指令信息传递给车辆[35].因此,操作不当可能会导致道路交通事故[36,37].转向操纵是驾驶员控制车辆行驶方向的手段,是驾驶操作的重要组成部分.因此,检测转向操纵有助于提高交通安全.此外,检测转向状态有助于智能驾驶员辅助系统(intelligent driver assistance systems,IDAS)的实现,该系统通过分析车辆传感器信息,帮助驾驶员对驾驶动作做出快速、安全的决策,从而拯救生命[38,39].最近,Zhang等[40]利用TENG 作为传感器来检测驾驶员的转向行为.TENG 工作模式采用垂直接触-分离式,制备结构由Kapton 胶带、铝和缓冲层组成,顶部和底部由Kapton 带封装,选择上层的底部Kapton膜作为摩擦层,中间的铝作为Kapton 的背电极.下层顶部的铝带作为另一个摩擦层和电极.上层和下层由两侧的缓冲层隔开,以产生间隙,从而当施加外力时,两个摩擦层之间的接触可以分开.TENG的长度相对较大,由于转向的形状,它是弯曲的.其重量轻、厚度薄,不会对驾驶员造成干扰.他们设计并实现了两个基于驾驶模拟器的实验,图7 所示为实验平台示意图.首先,量化并比较三个传感器(驾驶模拟器、摄像头和TENG)的响应速度.然后,设计并训练机器学习算法来检测三种转向动作,考虑到“准确和多样化的原则”,训练四个分类器(随机森林(random forest,RF)、SVM、k近邻和自适应增强)来比较它们的性能.从结果可知,RF的准确率最高,其微转向动作、正常转向动作和过度转向动作的个体分类率分别为91.3%,90.7%和98.0%.在机器学习中,RF 是一个包含多个决策树的分类器,并且其输出的类别由个别树输出的类别的数量而定.Leo Breiman和Adele Cutler 发展出RF 算法,这个术语是1995 年由贝尔实验室的Ho[41]所提出的随机决策森林(random decision forests)而来的.这个方法则是结合Breimans 的“引导聚集算法”和Ho 的“随机子空间”以建造决策树的集合.结果表明,使用此算法可以很好地识别TENG 的电信号来检测驾驶员的转向动作.与可穿戴设备相比,由于其材料的独特性和多样性,TENG 可以完美地安装在方向盘上,而不会干扰驾驶员.虽然摄像头对司机的干扰较小,但需要大量计算,容易侵犯隐私.TENG 的数据是一维电压值,而其结构简单,易于计算.与车辆的外部设备相比,基于TENGs 的方法由于其高效率和低成本可以容易地集成到当前的IDAS 产品中.此外,TENG 作为一种自供电传感器,有可能将握持方向盘的机械能转化为电能,并且与其他传感器相比,TENG 具有成本低、效率高、结构简单、材料选择多样、节能和自供电等独特优势.这项研究证明了使用TENG 作为驾驶员转向动作检测传感器的潜力.在驾驶员对车辆的各种动作中,驾驶员通过对刹车和油门踏板的动作来产生车辆的减速和加速,也是序列化驾驶行为的重要组成部分.因此,一种快速、准确的检测踏板不同动作水平的方法可能有助于预防交通事故,这是先进驾驶辅助系统的功能[42].驾驶员在踏板上的驾驶行为可以看作是驾驶员加/减速意图的表现.快速、准确地检测踏板上的驾驶动作强度,对预防道路交通事故和管理能源消耗具有重要意义.Cheng 等[43]研究的基于TENG 的驾驶员踏板动作强度数据驱动检测方法,使用了一种基于压敏自供电材料的TENG.与踏板动作相关的TENG 产生的电压数据可以很容易地收集并顺序存储.根据电压数据的特点,他们采用了混合机器学习方法.在同时采集到驾驶模拟器信号后,采用无监督高斯混合模型对踏板事件进行自动聚类.然后,提取TENG 电压数据的多特征候选项并进行排序.训练和测试了一个以TENG的电压数据为输入数据的监督RF 模型.结果表明,使用RF 算法可以获得90%以上的准确率.评价结果表明,所提出的数据驱动混合学习算法对驾驶员踏板动作强度的识别具有很高的准确率.此外,还对TENG 传感器和一些常用传感器的技术经济特性进行了比较和讨论,证明了数据驱动方法来检测驾驶员踏板动作强度的可行性.车速在交通事故中起着重要的作用,车速的监测必不可少.Ma 等[44]研究的通过分子表面工程和数据驱动学习优化性能的壳聚糖生物聚合物衍生TENG 传感器.用分子表面工程显著提高了基于壳聚糖的TENG 的性能,从而实现潜在的实际应用,并应用数据挖掘方法来分析和学习所获取的摩擦电信号与车速等级(即低、中或高)之间的关系,进而预测摩擦电信号与车速值之间的关系.选择使用机器学习领域中广泛采用的4 种分类方法来构建模型:1)决策树模型;2)线性判别分析(LDA);3)k近邻;4) SVM.基于相应的混淆矩阵、接收者操作特征曲线图 (receiver operating characteristic curve,ROC)的结果,评估每个模型的有效性,最终得出具有线性核的SVM 优于其他模型.SVM[45]是一类按监督学习方式对数据进行二元分类的广义线性分类器,其决策边界是对学习样本求解的最大边距超平面[27].SVM 使用铰链损失函数计算经验风险并在求解系统中加入了正则化项以优化结构风险,是一个具有稀疏性和稳健型的分类器.SVM 可以通过核方法进行非线性分类,是常见的核方法学习之一.SVM 在1964 年被提出,在二十世纪90 年代后得到快速发展并衍生出一系列改进和扩展算法,在人像识别、文本分类等模式识别问题中得到应用.这里展示的基于壳聚糖的TENG 与SVM算法结合拥有不错的识别性能,显示了自供电设备的巨大潜力,并为利用丰富的生物衍生材料制造经济可行和生态友好的能源、电子和传感器应用中的功能设备的新技术打开了大门.TENG 作为一种优良的自供电传感器,与机器学习结合,在交通领域具有重大的潜在价值[43].
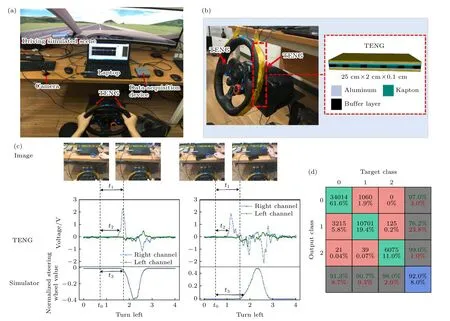
图7 实验平台和TENGs 的插图 (a)实验平台;(b)放置在方向盘上的两个TENGs,尺寸为25 cm×2 cm×0.1 cm;(c) 反应时间示意图;(d) RF 分类器给出的分类结果的混淆矩阵[40]Fig.7.Illustrations of experimental platform and TENGs:(a) Experimental platform;(b) two TENGs placed on steering wheel with a size of 25 cm×2 cm×0.1 cm.(c) Schematic diagram of reaction time;(d) confusion matrices of the classification result given by RF classifier[40].
4.2 环境监测
自然环境是人类赖以生存的根源,是人类的生存之地,环境的好坏直接影响到我们自身的健康,而且对子孙后代也会产生长远的影响,所以保护环境就是保护我们的社会.智能传感器作为环境监测仪器之一,其作用不言而喻.它能够有效监测我们的生活环境,并对于即将或可能发生的环境污染问题及时做出预警及措施,保证环境的可持续发展.管道被认为是最安全、最经济的液体运输方式,特别是对危险和易燃液体.液体泄漏是管道系统不可避免的问题,它是由管道基础设施的磨损和腐蚀、自然灾害或人为破坏等因素造成的.液体泄漏的监测和检测是许多企业和政府的首要任务.这是由于每年的液体泄漏不仅造成巨大的经济损失,而且危险的化学液体和核液体的泄漏对人体安全、环境和仪器都有极大的危害.Zhang 等[46]研究设计的基于大数据和机器学习技术的智能检测识别系统,因为固体和液体接触后存在电子转移[13],利用单电极液固TENG 的短路输出电流稳定性和智能检测识别系统的鲁棒性,成功地检测出了漏液,并对不同的液体进行了分类.图8 所示为检测识别系统的结构图,TENG 的制备选取p 型硅片作为摩擦电层,性价比高,环境抗干扰能力强.将p 型硅片切成2.6 cm×2.6 cm,用超声波依次在乙醇和去离子水浴中清洗.然后,在硅的未抛光面上附着一层相同尺寸的导电铜带(厚度0.01 cm)作为电极.制备质量浓度为99.7%,60%,40%,20%的自来水、乙醇和质量浓度均为15%的氯化钠液体和氢氧化钠液体,作为试验液体.当液体不断下落时,会产生一个连续的、周期性的电脉冲,不同种类的液体产生的脉冲信号特征不同.TENG 传感器检测到液体泄漏,得到大量电信号数据,以规则的时间间隔分割当前信号数据,并建立样本数据.由于采样频率在50 Hz 以上,造成数据样本的维度非常高,由于SVM 对于高维度数据的处理效果相对较好,所以该系统采用SVM 进行数据分类和处理.系统首先采用主成分分析法提取主要特征信息,降低数据维数,接着将采集到的数据以20 个固定时间间隔划分,得到120 个数据样本并将样本归一化至[0,1]范围,将其中60 个样本作为训练集,另外60 个样本作为测试集,然后使用SVM 分类器对数据进行预测分类,每种液体的分类准确率几乎达到90%以上.与传统的泄漏检测传感器相比,基于液固TENG 的自供电传感器不需要复杂的分布式能源供应系统,在液体泄漏检测方面表现出良好的性能,有利于扩大液体泄漏检测的实际应用范围.最重要的是TENG 与大数据和机器学习技术的成功结合,为未来探索TENG 与大数据和机器学习相结合的潜在应用奠定了基础.在环境监测中,关于水系统中悬浮沉积物的持续信息在工业和水文研究的各个领域中是至关重要的.
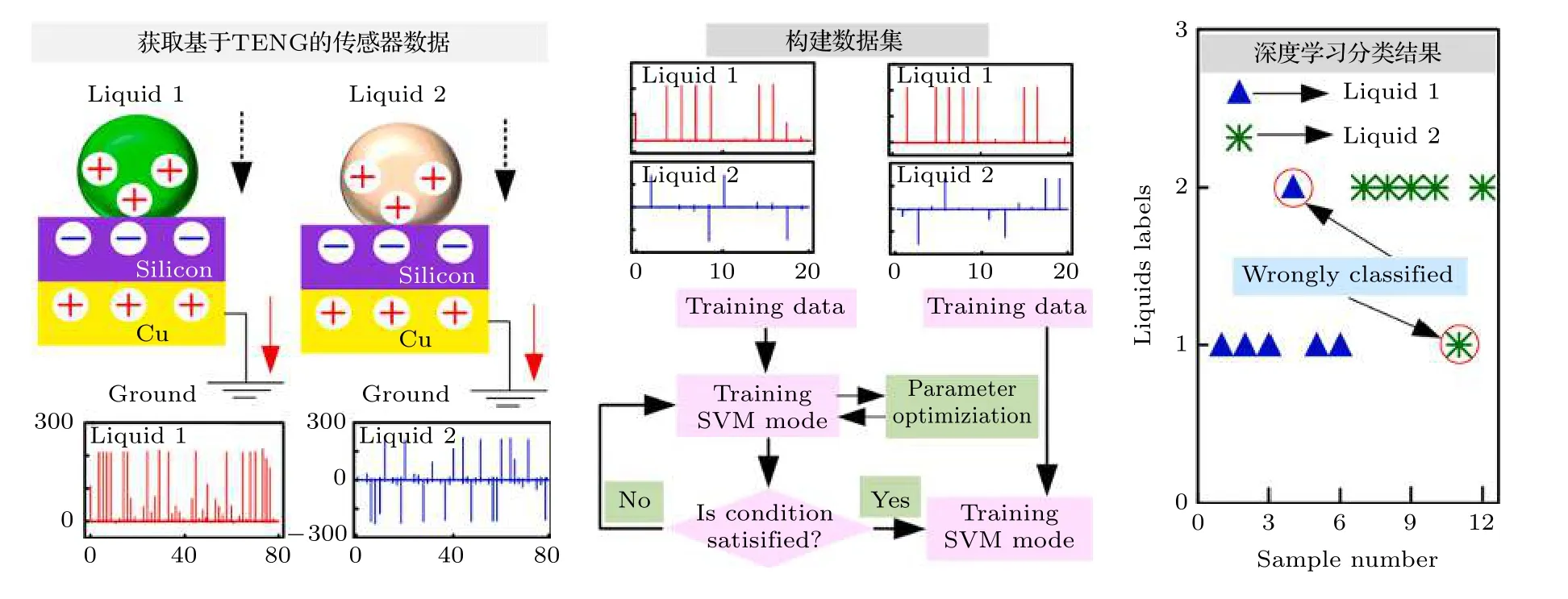
图8 基于大数据和机器学习技术的智能检测识别系统[46]Fig.8.Intelligent detection and recognition system based on big data and machine learning technology[46].
由于悬沙流量的高度变化,开发简单、可靠、实时的泥沙监测新技术仍然是一个挑战.Yang 等[47]报告了一种实现泥沙实时监测的潜在方法,即用深度学习方法实时监测沉积物的载粒子液滴驱动摩擦电纳米发电机(pldd-TENG).pldd-TENG 在单电极模式下工作,使用PTFE 薄膜的摩擦电层.pldd-TENG 的工作机理被证明是由液体-聚四氟乙烯CE和砂粒-电极静电感应引起的.然后,对不同颗粒参数下的性能进行了研究,结果表明,pldd-TENG 的输出信号对砂粒粒径和质量分数非常敏感.图9 所示为测试装置示意图,识别算法采用基于CNN 的深度学习方法,CNN 是前馈神经网络,受视觉神经科学中简单细胞和复杂细胞经典概念的启发,CNN 将神经网络与离散卷积相结合进行图像处理,可以直接接受图像作为网络的输入,避免了传统图像识别算法中进行的特征提取和数据重建的复杂过程.1980 年,Fukushima[48]提出了一种用于视觉模式识别的神经网络模型,即CNN的前身——新神经元.此后,尽管科学家们试图利用许多方法来训练多层网络,但随着网络深度的增加,由于缺乏计算资源,CNN 的性能受到限制.2006 年后,高效图形处理单元成为通用计算设备并促进了CNN 的进一步发展.在CNN 中,通常两个相邻层中的神经元是完全连接的,而同一层中的神经元不是,CNN 的每一层都接受上面一层的输出作为输入.三种类型的层用于构建输入和输出之间的CNN 架构:卷积层、池化层和全连接层.卷积层用于提取输入数据的特征并降低噪声.池化层对输入数据进行二次采样,并将输入数据划分为小区域,以便对每个区域应用函数,例如平均函数或最大函数[29].根据输出信号对粒子参数进行识别,该方法在大多数情况下识别精度均达到90%以上,为pldd-TENG 在泥沙实时监测中的应用提供了依据,在保护环境和水利监测方面具有潜在的价值.
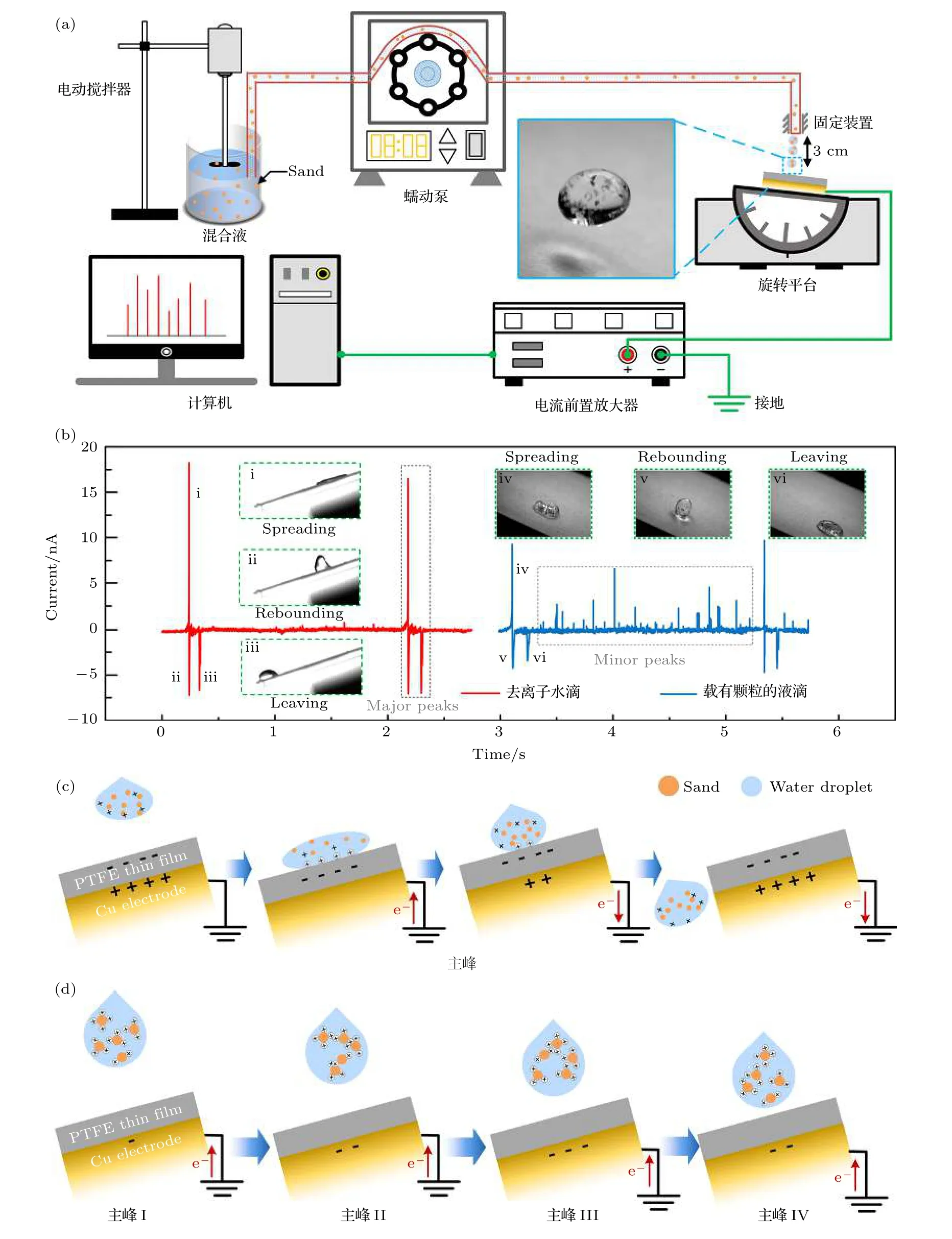
图9 实时沉积物监测的实验装置和工作机理图 (a) 测试装置示意图;(b)去离子水滴和质量分数为1.00%的含颗粒水滴(颗粒直径117.33 μm) 产生的典型输出短路电流,插图显示了使用高速摄像机捕捉到的液滴的动态运动;(c)水与PTFE 接触通电产生主要电流峰的机理;(d)预带电砂粒与铜电极间静电感应产生小电流峰的机理[47]Fig.9.Diagram of the experimental setup and working mechanism for real-time sediment monitoring:(a) Schematic diagram of the testing setup.(b) Typical output short-circuit current generated by DI water droplets and particle-laden droplets (particle diameter:117.33 μm) with a mass fraction of 1.00%.The inset figures show the dynamic motions of the droplets captured using a high-speed camera.(c) Mechanism of the major current peaks induced by the contact electrification between water and PTFE.(d) Mechanism of the minor current peaks induced by the electrostatic induction between the precharged sand particles and the Cu electrode[47].
4.3 信息安全
随着信息技术日新月异的发展,信息网络覆盖面也越来越大,网络的利用率稳步提高.然而信息化技术给我们带来便利的同时,各种信息安全问题也逐渐暴露出来.现代社会对计算机和计算机网络的依赖度很高,信息安全问题对个人、公司和国家已经变得非常突出.信息安全是个人的保障,是个人隐私的保障,也是国家安全的保障,其安全至关重要,一旦出现安全问题,将会造成严重的后果.如今,普通的基于密码和令牌的身份验证系统缺点越来越明显,普通的个人识别信息(如密码)都可以很容易被窃取.Shao 等[49]提供了一种通过手指与氟化乙烯丙烯(FEP)接触摩擦的TENG 来获取用户的击键特征,并使用DBN 进行特征识别的技术.DBN 由Hinton 等[31]在2006 年提出.它是一种生成模型,由多个受限玻尔兹曼机(restricted Boltzmann machine,RBM)层组成.受限玻尔兹曼机只有两层神经元,一层叫做显层,由显元组成,用于输入训练数据.另一层叫做隐层,相应地,由隐元组成,用作特征检测器.RBM 的训练过程,实际上是求出一个最能产生训练样本的概率分布.也就是说,要求一个分布,在这个分布里,训练样本的概率最大.由于这个分布的决定性因素在于权值w,所以训练RBM 的目标就是寻找最佳的权值.通过训练其神经元间的权重,可以让整个神经网络按照最大概率来生成训练数据.这样不仅可以使用DBN 识别特征、分类数据,还可以用它来生成数据.该文提出一种新颖、简单的基于按键动力学的识别方法.使用集成DBN 功能的智能键盘对用户的击键特征进行提取和模式识别.智能键盘关键功能元件(KFE) 由垂直堆叠的透明薄膜材料组成.一层聚对苯二甲酸乙二醇酯(PET)位于底部和顶部电极的两层氧化铟锡(ITO)之间.然后,在ITO表面涂上一层氟化乙烯丙烯(FEP) 作为带电层,在与人的手指接触时产生摩擦电荷.图10所示为智能键盘IKB 的基本工作原理,利用的是接触带电和静电感应之间的耦合,而不是传统的机械开关.当人的手指与FEP 接触时,在接触界面发生电荷转移.一旦击键开始,带正电的人手指靠近键盘,顶部电极上感应的正电荷被排出,导致自由电子流从底部电极流向顶部电极,直到手指和按键接触.当手指分开时,自由电子从顶部电极向底部电极回流.该方法从TENG 获取电信号(电压和电流),然后逐层提取用户的个人特征,包括击键方式、节奏、打字习惯、手指大小、个体生物电、打字力度.并且采用softmax 分类器从提取的特征中自动划分模板类型.这种方法使得用户认证系统的识别特征变得更丰富,并且需要更少的人力.该方法对104 个特征样本进行分析和学习,通过调整输入层的维度、DBN 层的数量以及类型模板的数量使识别率达到了较好的效果.结果表明,相比于传统的特征认证系统,该方法的输入稳定性和识别准确性都更为显著[50].
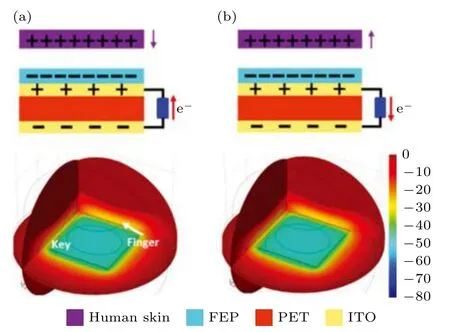
图10 智能键盘的工作原理 (a)当用户开始击键,带正电的手指接近导致自由电子从底部ITO 电极流到顶部电极;(b)手指抬起并发生分离时,会产生反方向从顶部电极流向底部电极的电流[50]Fig.10.Operating principle of the intelligent keyboard:(a)When a keystroke is initiated,the approach of positively charged human finger results in free electrons flowing from bottom ITO electron to top electrode;(b) when the finger is up and a separation occurs,it produces another current in the external circuit flowing from the top electrode to bottom electrode[50].
此外,笔迹签名也是最重要的个人行为生物特征之一,在广泛的生物特征中占有非常特殊的地位.笔迹签名被广泛应用于各种民用应用中,用于身份验证,增强安全性和私密性,图11 所示为TENG 在手写识别中的应用.Zhang 等[51]研究开发了一种基于TENG 的具有微纳米结构纹理的智能手写板,用于感知不同人的全面笔迹信息.基于新鲜采摘的聚己内酯(BPO)叶状和圆柱形微结构的TENG 作为一种智能自动力手写板,TENG 制备过程是在生物传感聚二甲基硅氧烷(PDMS)背面粘贴一层导电铜带作为底电极.然后将PDMS附着在聚甲基丙烯酸甲酯(PMMA)上作为底部的摩擦电部分.在PMMA 上附着一层薄铜膜,铜膜起着摩擦电层和上电极的双重作用.用4 个低k弹簧连接了摩擦电层的上下部,并制作了支架,上半部分与下半部分的间距为0.6 cm.数据来源为三个人的英文单词、中文字符和阿拉伯数字的手写信号由叶片启发的TENG 获取,另外三个人的英文句子和对应的中文句子的手写信号由基于圆柱形微结构PDMS 的TENG 获取.这些信号表现出独特的特征,采用先进的信号和数据处理方法提取关键特征信息,降低数据维数,结合SVM 多分类器对手写签名进行识别,成功识别了人的笔迹.英语单词、阿拉伯数字、汉字、英语句子和对应汉语句子的分类准确率分别达到99.66%,93.63%,91.36%,99.05%和97.73%.这一结果有力地表明,这种具有纹理的TENG 在个人笔迹签名识别、安全防御和私人信息保护应用方面具有巨大的潜力.
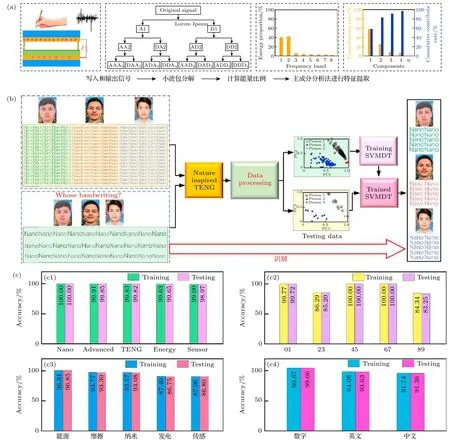
图11 TENG 在手写识别中的应用 (a) TENG 录制手写签名的过程;(b)结合TENG和机器学习方法进行手写签名识别;(c) 由三人书写英文、中文和阿拉伯数字的分类精度[51]Fig.11.Application of TENG in handwriting recognition:(a) Process of TENG recording handwritten signatures;(b) combining TENG and machine learning methods for handwriting signature recognition;(c) classification accuracy of English,Chinese and Arabic numerals written by three persons[51].
信息数字化进行存档是一门需要重视的信息技术,Tcho 等[52]基于TENG 研究了一种自供电字符识别装置,是一种将纸质数据转换为数字化信息以便进行永久归档的技术.字符识别分为两个步骤:首先将纸质文本上的字符转换为数字图像(扫描),然后将扫描的图像识别为字符(识别).在扫描阶段通常使用光学扫描仪和照相机.但是,由这种传统的光学处理手段所产生的噪声和失真会降低识别率.Tcho 等使用TENG 进行扫描处理.以下称之为带字符识别功能的TENG (CR-TENG).CR-TENG 是一种带有64 个铝制单元格结构的单电极TENG,利用铝和油墨接触摩擦所产生的电压强度高于铝和纸张接触摩擦所产生的电压这个特点,将纸张上的油墨图案扫描成64 像素的数字图像,如图12 所示.然后将扫描后的图像输入深度神经网络,并通过预先训练的深度神经网络将图像识别为数字.神经网络,在机器学习和认知科学领域,是一种模仿生物神经网络(动物的中枢神经系统,特别是大脑)的结构和功能的数学模型或计算模型,用于对函数进行估计或近似[28].神经网络由大量的人工神经元联结进行计算.大多数情况下神经网络能在外界信息的基础上改变内部结构,是一种自适应系统,通俗地讲就是具备学习功能.现代神经网络是一种非线性统计性数据建模工具,神经网络通常是通过一个基于数学统计学类型的学习方法得以优化,所以也是数学统计学方法的一种实际应用,通过统计学的标准数学方法能够得到大量的可以用函数来表达的局部结构空间,另一方面在人工智能学的人工感知领域,通过数学统计学的应用可以来做人工感知方面的决定问题(也就是说通过统计学的方法,神经网络能够类似人一样具有简单的决定能力和简单的判断能力),这种方法比起正式的逻辑学推理演算更具有优势.Tcho 等所使用的神经网络为3 层结构(784 个神经元),即第一隐藏层(400 个神经元),第二隐藏层(200 个神经元)和输出层(10 个神经元).输出层的10 个神经元表示0—9 十个数字.有3 个权重矩阵,其中第一个矩阵在输入层和第一隐藏层之间,第二个矩阵位于第一隐藏层和第二隐藏层之间,第三个矩阵位于第二个隐藏层和输出层之间.训练过程包括递进计算和反向传播,并更新权重矩阵,在mnist 数据库中的识别率达到97.5%.CR-TENG 的优势在于扫描方法不需要光,解决了传统光学方法的缺点,而且仅用铝制材料,不需要额外的电能就可以运行,通过优化扫描过程和识别过程,这种新的基于CR-TENG 的字符识别系统实现了很高的识别率,在信息数字化存储领域显示出很大的潜力.
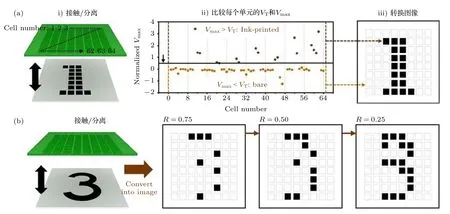
图12 CR-TENG 的工作原理图 (a) 基于CR-TENG 的扫描过程:i) CR-TENG和纸张之间的接触和分离;ii)比较每个单元格的输出电压(vmax)和 vT;iii)将纸上图案转换后的数字图像.在 vmax值大于 vT 的单元格中,确定接触的纸张为已进行墨水打印的纸,而在 vmax值小于 vT 的接触纸张被确定为裸纸.(b)根据r 扫描图像的清晰度[52]Fig.12.Working schematic of CR-TENG:(a) The scanning process based on the CR-TENG.i) Contact and separation between the CR-TENG and paper;ii) Comparison of the output voltage (vmax) and vT in each cell;iii) Converted digital image of the pattern on paper.In cells with a vmaxvalues larger than vT,the paper in contact was determined to be ink-printed paper,while in cells with a vmaxvalues smaller than vt,the paper in contact was determined to be bare paper.(b) Legibility of the scanned image according to r[52].
4.4 人机交互
人机交互是一门研究系统与用户之间的交互关系的学问,系统可以是各种各样的机器,也可以是计算机化的系统和软件.人机交互界面(humanmachine interface,HMI)通常是指用户可见的部分.用户通过人机交互界面与系统交流,并进行操作.人机交互具有悠久的发展历史,是现代物联网中不可或缺的一部分.然而,传统的人机交互方式受到诸如电源要求和结构复杂性的限制.作为一个解决方案,基于TENG 的人机交互方式被认为是一个有效选择.未来,人工智能(artificial intelligence,AI)技术与物联网技术的结合将带来一个基于智能物联网(artificial intelligence internet of things,AIoT)的生活、工作和制造环境.为了实现对AIoT 系统的控制,需要部署大量传感器实现实时感官信息收集,并且完善对数据的管理和分析.由此发展出了利用传感器信息在虚拟世界中控制物理世界的高级人机交互技术,即数字孪生技术.但是,如何设计出一个高效智能的传感器系统仍然是一个挑战.Jin 等[53]研究了一种基于TENG 传感器的智能软机器人抓手系统 用于捕捉软抓手的连续运动和触觉信息,图13 为TENG 传感器及其基本结构.触觉传感器采用特殊的分布电极,可以感知外界刺激的接触位置和接触面积.带可伸缩条的齿轮式长度传感器可通过每颗牙齿的顺序接触连续检测延伸率.利用SVM 对软抓手操作过程中采集到的摩擦电感知信息进行进一步训练,识别出不同的目标,准确率达到98.1%.此项工作针对虚拟装配线和无人仓库的应用,成功地创建了数字孪生应用程序,并展示了根据软机器人抓手系统的实时操作在虚拟环境中识别对象和复制机器人操作的过程.这种基于TENG传感器的软机器人手爪在抓取机器人、机械臂、仿人手等其他机器人中也有很好的应用前景,并为实现更有效、无缝的人机交互奠定了基础.

图13 用于软夹具及其数字孪生应用的低成本TENG 的结构图 (a) TENG 传感器及其基本结构.(i)长度TENG (l-TENG)传感器;(ii) 触觉TENG (t-TENG)传感器.(b)集成TENG 传感器的机械爪;(c)智能感官数据处理.E1— E4,EL表示t-TENG 传感器的电极;(d) AIoT 传感系统的数字孪生应用[53]Fig.13.Construction drawing of the low-cost TENG for soft gripper and its digital twin applications:(a) As-fabricated TENG sensors and their basic structures.(i) Length TENG (L-TENG) sensor.(ii) Tactile TENG (T-TENG) sensor.(b) Soft gripper integrated with TENG sensors.(c) Intelligent sensory data processing strategies.E1 — E4,and EL represent the electrodes in the TTENG sensor.(d) Digital twin applications based on AIoT sensory system[53].
触觉作为人类与外界环境交互的重要手段之一,在虚拟现实和增强现实系统中扮演着重要的角色.Shi 等[54]提出了一种基于TENG和球型电极阵列形成的电触觉界面的自供电、无痛、高灵敏度的虚拟触觉系统,用于实现增强的虚拟触觉体验.通过控制电极与人体皮肤之间的分离距离,该虚拟触觉系统可以精确调节皮肤上的感应电流,实现高度敏感但无痛的虚拟触觉体验.在这个皮肤集成的电触觉界面中,TENG表面的触摸位置和运动轨迹可以精确地复制到皮肤上.这项工作是自供电虚拟触觉刺激系统的首次演示,展示了解决传统VR/AR技术的可持续性问题和电线限制的不同方法.这种基于TENG 的电触觉系统可以应用于许多领域,包括虚拟触觉显示、盲文指令、智能防护服,甚至神经刺激.Hou 等[55]研究了一种新颖的、自供电的三角并行人机界面(DT-HMI),用于三维传感和控制,图14 为DT-HMI 的示意图.此研究利用拥有三对基于接触分离和摩擦电效应滑动模式的传感齿轮的TENG 进行驱动,根据并联机器人的正逆运动学,可以计算出平台的空间位置和运动姿态.六电极的三对TENG 感应齿轮定义了512 个虚拟感应像素,并利用成本低、设计简单的DT-HMI 控制器进行远程控制甚至空间位置映射.输出信号的组合能够实现一个高度可伸缩的、自供电的摩擦电子界面,用于多种应用场景,包括二维和三维(2/3D)控制、VR/AR、交互、机器人等.
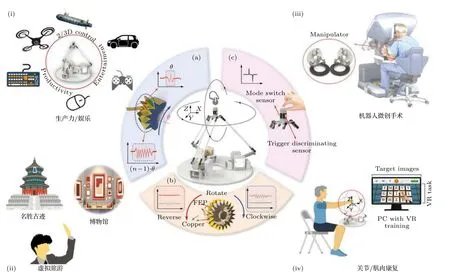
图14 DT-HMI 的示意图.主要功能单元有 (a) 基于齿轮旋转及其输出信号的DT-HMI 的TENG;(b)在正向旋转和反向旋转的过程中,布置在齿轮(TENG 感应齿轮)两侧的TENG 输出不同的信号;(c)布置在移动平台中间圆柱上的模式开关传感器和触发识别传感器[55]Fig.14.Schematics of the DT-HMI for diversified applications.The major functional units:(a) TENGs of the DT-HMI based on gear rotation and its output signals;(b) TENGs arranged on both sides of the gear (TENG sensing gears) output different signals during forward rotation and reverse rotation;(c) Two triboelectric sensors arranged on the middle cylindrical of the mobile platform are the mode switch sensor and trigger discriminating sensor[55].
4.5 健康和运动监测
随着物联网和大数据在过去几十年的快速发展,使家庭自动化、医疗保健、安全、环境监控和信息通信等领域发生了革命性的变化.体育竞技也受到了技术进步的极大影响,快速进入了数字化时代.大数据服务,包括锻炼表现、健康数据、训练统计和分析,可以有效地帮助运动员进行日常训练和制定比赛策略,成为赢得比赛不可或缺的手段.基于TENG 的自供电传感器作为可穿戴传感器,可以有效地从身体运动中获得运动信号,可用于运动员的训练和比赛、身体康复和个人健身[56-58].基于TENG 的自供电传感器已被用于比赛场地传感器,以收集训练和比赛数据[59].智能运动由于个人健身会需要非常大量的传感器节点,典型的肢体运动传感器总功耗为450 mW,连续工作时间为3.5 h[60],基于传统传感器的智能运动存在很大的功耗问题.然而TENG 传感器不仅为功耗问题提供了很好的解决方案,而且可以为AI 算法提供多维数据.最近,Luo 等[61]设计了一种柔性木质摩擦纳米发电机(W-TENG)作为自供电压力传感器,用于制作训练和运动数据分析系统的智能乒乓球桌.如图15 所示,W-TENG 可以收集乒乓球的落点、速度等数据信息,对这些数据的大数据分析可以帮助指导运动员进行训练,并制定更好的竞争策略.这些数据可以收集并分析每个运动员的运动特征,根据这些特征数据设计智能机器人,以帮助运动员训练.总的来说,这种智能乒乓球监测系统可以实现以下几个优点:第一,W-TENG 阵列是木质的,安装在桌面上,不会影响乒乓球桌的功能;第二,准确识别乒乓球的落点,通过统计落点分布数据,对传感器数据进行大数据分析;第三,分析结果可以指导运动员的训练,有助于识别运动员的运动风格;最后,它可以通过比赛中有争议的边缘球的数据为裁判提供判断依据.这种自供电传感器也可以应用于其他球类运动场景.如 W-TENG可以用于排球或篮球,帮助确定球是否出界.与传统的基于摄像机的运动分析系统相比,基于WTENG 的运动监控系统可以提高传感精度,消除人为因素的干扰,在体育比赛中的低成本和高准确性的自供电实时裁判方面具有潜在应用[62].
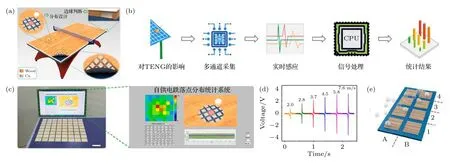
图15 W-TENG 在智能运动中的应用 (a) 基于W-TENG 的智能乒乓球台的结构;(b) 基于W-TENG 的自供电跌落点分布统计系统的操作流程;(c)自供电跌落点分布统计系统;(d)不同球速下的传感器输出电压;(e) W-TENG 传感器阵列分析乒乓球运动轨迹和落点的原理[61]Fig.15.Application of the W-TENG in intelligent sports:(a) Structure of intelligent ping-pong table based on W-TENG;(b) operation procedure of statistical system of self-powered drop point distribution based on W-TENG;(c) self-powered drop point distribution statistical system;(d) sensor output voltage at different ball velocity;(e) principle of W-TENG sensor array to analyze the trajectories and drop points of table tennis[61].
随着物联网技术的快速发展,虚拟空间对真实运动比赛的还原模拟技术逐渐显示出了巨大的应用潜力.Wen 等[57]提出了一种自供电导电超疏水摩擦电织物的机器学习手套,使用超疏水摩擦电织物制作的手套可以避免湿度和汗水对摩擦电输出的影响,通过传感器收集运动员的运动数据,如运动员的投球姿势,来模拟真实的比赛.如图16 所示,该工作首先通过安装有TENG 传感器的手套收集手势数据并输出信号,然后采用CNN 分析这些信号,最后得到投球的手势.目前用于包括掌球、曲球和指关节球等运动的手势识别.经过训练的CNN 可以获得高达99.167%的识别准确率.这项工作结合了多种摩擦电纺织品传感器和适当的机器学习技术,用极简设计的手套在真实和虚拟空间中实现复杂的手势识别,具有很大的应用潜力.Syu 等[63]研究的基于仿生多孔纳米纤维的混合传感器,用于通过深度学习方法进行压力感知和人体姿态识别.通过将铜仿生聚二甲基硅氧烷TENG传感器混合,产生了一种仿生柔性混合自驱动传感器(BHSS),具有压电和摩擦电结合的独特优点,能够有效地收集人体运动中的微小生物力学能量.通过将BHSS粘附在手套上作为智能手套,与机器学习技术结合应用于手势识别领域,有效地识别了5 种人体手势动作.数据来源于佩戴在身体上的BHSS 传感器获得的电流信号,考虑到采集到的电流信号属于时间序列,所以该项目使用LSTM进行分类识别.LSTM 是一种基于循环神经网络(RNN)的深度学习方法[30].与标准前馈神经网络不同,LSTM 具有反馈连接.它不仅可以处理单个数据点(如图像),而且可以处理整个数据序列(如语音或视频).例如,LSTM 适用于诸如连续不断的手写识别、语音识别和网络流量或入侵检测系统中的异常检测之类的任务.并且训练LSTM 网络来识别佩戴者的活动,具有非常不错的识别性能.可穿戴的BHSS 传感器,拥有很好的稳定性和持久性,可以应用于健康运动恢复,在人体姿态识别、医疗仿生穿戴、虚拟/增强现实方面拥有不错的研究价值.
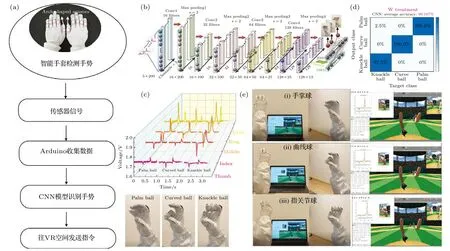
图16 用机器学习演示棒球比赛场景 (a)手势识别和控制流程图;(b) CNN 模型的结构;(c) 手势的信号模式;(d)投球3 种常见手势的混淆矩阵;(e) 3 个手势的照片(左),以及在Unity 中使用手势实现VR 控制的对应截图(右)[57]Fig.16.Demonstration of baseball game scenario with machine learning:(a) Flow chart for gesture recognition and control;(b)structure of CNN model;(c) signal patterns of 3 gestures;(d) confusion matrix for 3 common gestures of pitching ball;(e) photographs of 3 gestures (left),and corresponding screenshot of using gestures to achieve VR control in Unity (right)[57].
足部活动是人体运动动能的主要来源之一.Zhang 等[56]研究了基于TENG 的智能袜.该智能袜可以进行步态分析并应用于虚拟现实场景,如图17所示.智能袜传感器包含4 个功能层,包括腈薄膜、具有图案化平截头体结构的硅橡胶膜,以及附着在两个前述接触带电层背面用于电荷收集的两个导电织物.此外,两个非导电织物层用于在外表面上密封该装置.压力刺激会基于TENG 传感器的工作机制,通过接触分离模式感应电荷,并进一步在外部电路中流动,将机械能转化为电能.该工作的特点是从低频身体运动中收集废弃能量,通过无线传感器传输并分析体态数据.装有自供电功能的袜子还可以用作可穿戴传感器,以传递关于用户身份、健康状况和活动的信息.并且该工作提出了一种基于socks 信号端到端结构的优化深度学习模型用于步态分析,模型体系结构包括4 个卷积层、4 个最大池层和一个输出5 个参与者的预测标识的全连接层.该模型经过训练,对13 个参与者的识别准确率为 93.54%,对5 种不同的人类活动的检测准确率为96.67%.在实际应用中,通过袜子收集的物理信号映射到虚拟空间,以建立一个用于运动监控、医疗保健、身份识别和未来智能家居应用的数字人体系统.

图17 可以识别人类活动的智能袜 (a)在VR 游戏中从感官信息采集到实时预测的过程;(b)智能袜对不同动作(跳跃、奔跑、滑行、跳跃和行走)输出的3D 曲线图;(c)混淆矩阵;(d) 在数字人体系统中的虚拟角色运动和真实人类运动的对应关系[56]Fig.17.Human activities recognition of deep learning-enabled socks:(a) Process flow from sensory information collection to the real-time prediction in VR fitness game;(b) 3D plots of the deep learning sock outputs responding to different motions (leap,run,slide,jump,and walk);(c) confusion map for deep learning outcome;(d) motion of the virtual character corresponding to real motion in a proposed digital human system[56].
对于智能建筑和智能家居,越来越多的设备,如电子门禁、自动化辅助设施、智能交互设备、身份认证系统、健康监测系统等需要通过采集用户的步态信息和行动轨迹来帮助提升用户体验.为了达到这个目的,目前常用的方法是在用户居住环境加装摄像头,或者用户身体上佩戴智能设备,并最终将数据上传行为监测系统进行分析.这样做不可避免地会暴露用户的隐私,安全隐患极大.地板作为最常用的交互界面之一,可以通过嵌入式传感器来提取丰富的感官信息,而无需考虑其他设备的辅助.Shi 等[64]开发了基于摩擦电机制的深度学习型智能地垫(DLES 地垫),以实现智能、低成本和高度可扩展的地板监控系统.DLES 地垫是通过丝网印刷制造的,为每个标签设计了不同覆盖率的独特电极图案,模仿快速反应码系统的独特识别.因此,在以间隔方案并联连接之后,对于整个DLES 阵列,可以实现具有可区分和稳定特性的最小双电极输出,支持室内定位和活动监控.此外,通过集成的基于深度学习的数据分析,可以使用CNN 模型从输出信号中提取与行走步态模式相关联的身份信息,当一个人穿过DLES 阵列时,由脚步驱动的TENG 通过周期性的接触-分离运动产生电信号.这些信号经过采集通过2 个通道输出,每个通道产生1600 个数据点.每个用户采集了100组样本,80%的样本数据用于训练,另外20%的样本数据用于测试.经过50 个训练时期的CNN 模型训练过程,可以达到最大的精度,并且CNN 模型能够进行足够的泛化,避免过拟合,平均识别准确率为96.00%,为基于深度学习预测的高精度控制提供了很大的潜力.通过对同一用户在不同通过状态(正常走、快走、跑步)下的识别测试,展示智能地板监控系统在不同情况下的适用性.Shi 等[65]在2021 年又开发了一种新的高可靠性的智能地面监测系统,首先在地面铺设一个 4×4 的TENG 传感器阵列来收集用户的实时位置和足部姿态,该TENG 拥有4 个独立电极,包括一个参比电极、两个编码电极,其中一个片状电极来捕捉步态信息,其余3 个进行位置监控.然后将编码后的时域信号输出得到用户的站立位置、行走轨迹、步态等信息.因为正常人一个步行周期可划分为6 个步态时相,这6 个步态时相每个个体之间存在差异,所以Shi等利用深度学习中的一维卷积神经网络对步态时相进行分类进而确定用户的身份信息.与传统的传感器(如光学传感器、电阻式传感器和电容式传感器)相比,TENG 传感器具有低成本、低功耗、高可靠性、良好的可扩展性和低系统复杂度等一系列优势,并且使用深度学习技术可以对步态信息中的细微特征进行分类和识别,这是传统信号分析方法(如幅度、持续时间、延迟、频率、相位等)所无法实现的.Shi 等所开发的智能地板监控系统具有出色的位置传感、活动监控和身份识别能力,在自动化、医疗保健、安全和面向智能建筑/家庭的物联网应用中显示出巨大的应用潜力.
5 机遇与挑战
综上所述,TENG 结合机器学习已经在诸多领域崭露头角,这对人们的日常生活产生了深远的积极影响.但是考虑到这是一个新兴领域,在未来的发展过程中仍然存在着一些亟需解决的问题,如图18 所示.
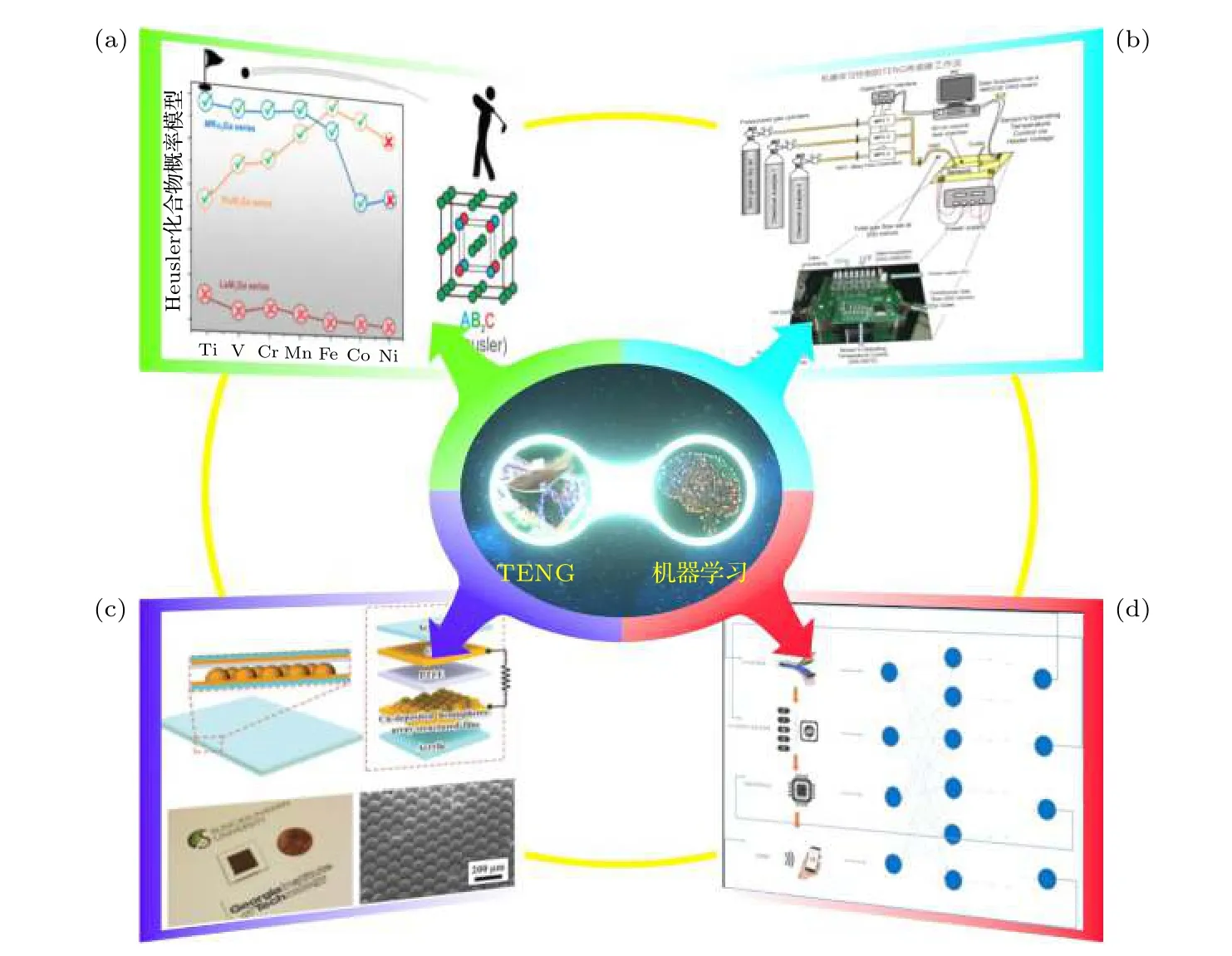
图18 结合机器学习技术的TENG 传感器在未来面临的挑战 (a) 机器学习辅助制作TENG 传感器材料;(b)优化TENG 传感器信号处理结果;(c) 优化TENG 传感器设备的封装;(d)使机器学习技术和TENG 传感器深度融合Fig.18.Future challenges by TENG sensors combined with machine learning technology:(a) Production of TENG sensor materials assist by machine learning;(b) optimize results of TENG sensor signal processing;(c) Optimize the encapsulation of TENG sensor equipment;(d) combine deeply machine learning technology and TENG sensors.
5.1 机器学习辅助制作TENG 传感器材料
随着现代社会生活品质的提高,人们对TENG的功能特性有了更高的要求,如器件的灵敏性、透气性、防水性和输出稳定性.可穿戴TENG通常需要与人体保持长时间的亲密接触,所以器件的封装与生物相容性必须引起人们的关注.鉴于复杂且不规则的人体活动,器件必须具有足够的柔韧性以便能适应皮肤的形变.如果使用有机材料,材料在使用的过程中会产生变化,不利于长时间输出稳定的信号.在未来还会逐渐对材料的抗腐蚀性、便捷性、耐久性等有更多要求.并且新材料的引入也会提高TENG 的性能,如使用离子辐射技术加工的Kapton 薄膜可以极大提升TENG 的表面电荷密度[66].传统的材料制备方法因为缺少自动化筛选机制和材料数据库的支撑,往往需要手工对所有可能的材料进行大量且繁复的实验,如Zou 等[67]通过采用既定的测量方法对30 种无机非金属材料的摩擦电荷密度等物理特性进行量化测量.随着材料科学的进步,机器学习以其强大的预测性能和相对较低的计算成本,在性能预测、新材料发现和量子化学探索等领域已有成功的应用案例.例如,Oliynyk 等[68]使用机器学习方法来研究潜在的Heusler 化合物和性质.Ward 等[69]提出了一个预测无机材料性质的通用机器学习框架.该模型可用于预测晶体和非晶体材料的各种特性,如带隙能和玻璃形成能力.这些案例表明利用机器学习解决TENG 对材料选择的问题可能是一种很好的方法,这将会优化TENG 的输出特性并拓宽其应用范围.
5.2 优化TENG 传感器信号处理结果
TENG 智能传感器所采集的信息是通过识别其本身输出的电信号来实现的,而输出功率过低一直是此类设备的瓶颈.虽然目前已有诸多改善方法,如增加能量循环次数、合理设计栅极的数量和间距、降低介电层的厚度等.但相较于传统传感器,目前TENG 的有效输出功率仍有不足,得到的信号特征随时间变化差异较大.且输出的电信号数据为一维时间序列数据,其携带的信息与二维数据、三维数据相比而言较少,这增加了智能识别的难度.因此,解决这个问题需要从两个方面入手,一方面进一步优化TENG 输出性能和功率管理,以便提高能量转换率和提高信号输出质量;另一方面针对TENG 数据来设计行之有效的机器学习算法,使得TENG 智能传感器拥有更高的识别率和性能,如Vergara 等[70]在三年内收集了6 种挥发性不同的化合物的数据集,并使用机器学习分类器进行自动分析,最后使其在处理气体传感器漂移方面效果显著.
5.3 优化TENG 传感器设备的封装
TENG 作为自供电智能传感器器件,其使用环境十分复杂.工作环境中的空气湿度、温度、尘埃、噪声和设备本身的磨损等因素会极大地降低TENG 的使用寿命和稳定性,还要考虑信息采集对象的行为特征对数据的干扰,尤其是医学领域中对人体生理信息的采集,如人体汗液对可穿戴传感器输出信号的影响.因此,在复杂的实际使用环境中保证所采集数据的有效性仍然是一个巨大的挑战,目前仍缺少一种可靠的封装方法使TENG能长时间地稳定工作.纳米材料和纳米技术可以为解决基于TENG 的传感器封装问题提供一些方案,例如纳米材料修饰过且具有三维结构的电极可以显著提高固定后酶的稳定性.这可以提高酶燃料电池在体内的输出稳定性.封装也可以直接影响到器件在体内的长期稳定性.如Gu 等[71]提出了一种封装的TENG,能够在灰尘、湿度和多雨的环境中收集噪声能量,与未密封的装置相比,该装置在耐用性和可靠性方面有明显的提高.Lee 等[72]制造了一种基于半球阵列结构的完全封装的TENG,具有优异的机械耐久性、优异的坚固性和高弹性.除此之外,PDMS 等聚合物材料具有生物相容性,则可以用做可植入能量捕获装置的封装材料.因此,随着材料科学和微纳加工工艺的飞速发展,基于TENG 的自供电器件的封装问题日后一定会得到妥善解决.
5.4 使机器学习技术和TENG 传感器深度融合
目前TENG 与机器学习技术的结合还仅限于使用机器学习工具对TENG 传感器产生的信号进行被动处理,这限制了TENG 与机器学习结合之后在实际场景中的应用.所以在未来除了能使用机器学习技术来处理TENG 传感器生成的信号之外,还要进一步开发具备模型训练功能的AI 芯片,并且将这种AI 芯片和TENG 传感器集成在一起.这样不仅能使TENG 传感器更为智能,部署维护更为灵活方便,还能大大减少训练模型所产生的能耗.这方面的研究已经初具苗头,如2021 年IBM公司使用极紫外工艺制造了一种低功耗的AI 原型芯片,该芯片主要用于训练深度学习模型[73].采用机器学习技术对TENG 传感器信号进行处理,其效果不仅仅取决于机器学习模型和算法的选取,也依赖于TENG 传感器输出的信号质量,在未来,随着AI 芯片的不断普及,通过部署基于AI 芯片的分布式计算环境,机器学习技术也会和TENG 传感器的制作过程深度融合,包括和材料制备,结构设计,外电路设计等环节深度耦合,用每次学习的结果反向指导TENG 传感器的选材和设计,然后继续下一阶段的学习,在这个不断迭代的过程中持续对TENG 传感器进行改良和升级,以期在实用中获得更好的效果.这种方式在一些专用传感器的制作中已经进行了初步的尝试,如在生物医学领域,有一种快速莱姆病检测的计算护理点传感器,使用大数据驱动的机器学习框架来自动改进传感器子组件[74],这种在制作过程中将TENG和机器学习技术深度结合必将变为未来重要的研究方向.
6 结论
TENG 作为一种新型的发电装置有着重量轻、制造方式相对简单、使用广泛和环保等优点.本文首先介绍了王中林院士团队对摩擦起电的最前沿理论研究以及TENG 的工作原理和4 种工作模式,同时概括了TENG 作为自驱动传感器在每种工作模式下现有的设计方案及其应用,随后总结了现有的基于TENG 的自驱动传感器在信号采集端的问题和不足,以及使用机器学习技术对输出信号的分析和处理的重要性.通过对已有案例的梳理,得出了机器学习在处理由基于TENG 自驱动传感器产生的信号时的工作流程,即数据预处理、特征提取、建模、验证和输出结果.最后分类介绍了几个机器学习在TENG 中使用的案例,如方向盘驱动行为检测、液体泄漏检测、沉积物检测、击键识别、手写识别和文本识别等,充分展现了机器学习技术不但对自驱动传感器的信号处理阶段有着无以伦比的优势,甚至可以反向指导传感器的设计,使其功能可以进一步地拓展.
尽管基于TENG 的自供电智能传感器发展迅速,但是TENG 作为新兴能源收集技术在产业化应用的道路上仍然面临着许多问题.随着微芯片的功耗不断降低和TENG 性能的不断提高,文中也针对每个应用在未来可能的技术前景进行了展望.结合机器学习这一强大工具,基于TENG 的智能传感设备未来在物联网和分布式应用中将表现出巨大的潜力和蓬勃的活力.
