牵引车主动防碰撞预警及驾驶员疲劳检测系统的设计与应用
2022-04-15唐伟钟沛袁彬彬袁源
唐伟 钟沛 袁彬彬 袁源
摘要:本文介绍了南航创新开发的牵引车主动防碰撞管理系统及驾驶人员疲劳检测系统。牵引车主动防碰撞预警管理系统针对牵引车外形和安全运行需求,融合了全景拼接、远距超声波测距、视觉和毫米波雷达传感器等关键技术,实现牵引车防碰撞智能预警及驾驶员驾驶提醒,有效降低事故发生率,提高安全性。
关键词:飞机牵引车;主动防碰撞;预警;疲劳检测
Keywords:aircraft tow tractor; active anti-collision; early warning; fatigue detection
0引言
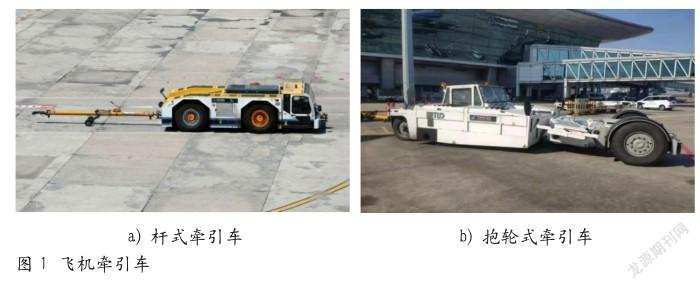
随着我国新一代智慧民航产业的不断发展,机场地面资源的需求也随之快速增长。飞机牵引车是机坪工作与飞机配合最为紧密的特种工作车辆,机坪内飞机在地面的转移、维修和调试都需要借助飞机牵引车的拖动。按照牵引方式的不同,飞机牵引车可分为有杆式牵引车和抱轮式牵引车,如图1所示。飞机牵引车为机务运行管理提供有力的保障,是机场地面保障的主体力量。飞行任务的不断增加使得机场环境内的交通复杂度与移动目标的管理难度不断提高,飞机牵引车运行管理的安全性和可靠性对民航业提出了重要挑战。
中国南方航空股份有限公司是国内运输航班最多、航线网络最密集、年客运量亚洲最大的航空公司。截至2020年12月,南航工程技术分公司现有牵引车116辆,其中有杆牵引车99辆,抱轮牵引车17辆。随着航班数量的不断增加,机务人员的飞机牵引工作越来越繁复,工作压力不断增加。特别是2020年全球新冠疫情以来,飞机停场/封存明显增多,牵引飞机成为机务日常工作,这使得牵引车也成为与飞机刮碰和人员伤亡安全隐患概率最高的特种车辆。因此,如何对特种车辆进行高效的监管,是提升航司机务管理能力的关键问题之一。
针对这一问题,南航创新地开发了牵引车主动防碰撞管理系统及驾驶人员疲劳检测系统,分别针对牵引车及牵引车驾驶人员进行了管理,有效降低了事故发生率,提高了安全性,相关成果获得第二届南航创新挑战赛二等奖,为拓展公司机务信息化管理水平、提高智能化和数字化管理能力提供助力。本文对牵引车主动防碰撞管理系统及驾驶人员疲劳检测系统的功能和采用的关键技术进行介绍,并对未来发展进行展望。
1牵引车主动防碰撞管理系统
在国内,车辆防碰撞系统目前主要应用于汽车和商用车,主要是归因于政策驱动和安全要求的驱动。在家用汽车领域,主动防碰撞管理系统通过结合L2级自动驾驶辅助系统已经逐步在多种车辆使用场景开展了技术推广,在大型工程车辆(如环卫车)、建筑工程用车和矿山车辆等特种车辆也在应用并对使用场景作了优化。
对于航空特种车辆中使用最多、场景最复杂的牵引车,目前国内还没有进行防碰撞管理系统的研究和应用。但是,飞机牵引车由于其形状特殊,车辆盲区大,存在较大的安全隐患。驾驶员即使在清醒的情况下也很难看到人或者机场内的设施,容易发生安全事故,从而对运行造成严重的影响。
针对这一问题,南航创新地开发了牵引车主动防碰撞管理系统。该系统包括远距防撞系统和中远距防撞系统。下面对系统及采用的关键技术进行介绍。
1.1牵引车近身防撞系统
飞机牵引车外形特殊,车辆尺寸长、重量大,刹车制动距离较长,比民用车辆有更多的视角盲区。因此,采用360全景与超声波融合防撞预警技术相结合进行车辆近身防撞系统设计。
360全景拼接融合技术是一种利用实景图像组成全景空间的技术,它将多幅图像拼接成一幅大尺度图像或360度全景图,实现对牵引车目标周围环境的全局观察。针对飞机牵引车的车型情况,进行了车辆四周360度环境视频信息的探测与采集,并且基于全景图像构建了3D无畸变技术,最终完成了飞机牵引车近处360度无盲区的全景视频实时观察,从而实现了360度无盲区近距离的安全防撞预警。需要说明的是,360度全景拼接融合系统的计算是在嵌入式平台上完成的。这就要求嵌入式平台要有足够的计算能力承载3D环境建模和自由观测视点的实现、多路高清数字摄像头的接入、快速的图像数据解码和核心处理器、专用图像处理器间的高速数据搬移。
针对牵引车前后、侧向近距离的防护部分,采用多超声波传感器融合进行盲区区域覆盖。系统采用了0.3~5米距离范围和0.8~8米距离范围的超声波测距,通过消除各超声波的发波和回波干扰,进行雷达信号发波、收波的控制,进行信号的解算,最终得到准确的障碍物距离。系统采用工业级处理器以满足算法的运算需求,并且适应牵引车的电磁工作环境。
1.2 牵引车中远距防撞系统
飞机牵引车的中远距防撞系统采用视觉检测与毫米波雷达融合防撞预警技术相结合进行开发。在视觉远距离目标检测方面选用深度学习算法进行机场多目标的检测与识别。首先基于牵引车的目标样本进行识别网络模型的训练,然后将训练得到的网络模型和参数集用于图像目标的检测。为了达成目标的实时检测与预警,系统在视频序列中实现了对特定目标跟踪,在视频序列中的每幅图像中能夠快速、准确、高效地找到感兴趣的目标运动位置。
在毫米波雷达目标探测方面,系统接收到雷达数据后,对雷达数据目标数据进行去干扰预处理。为了保证雷达对多个目标的有效检测与跟踪,首先需要对毫米波雷达进行杂波屏蔽与目标初选,然后对雷达进行目标跟踪处理。由于毫米波雷达与上述视觉检测是独立的,因此需要对二者进行融合,以实现传感器的空间配准和时间同步。
2驾驶人员疲劳检测系统
驾驶人员疲劳检测系统的基本原理是利用人体平衡性。平衡能力是一切静态与动态活动的基础能力,指身体所处的一种姿态以及在运动或受到外力作用时能自动调整并维持姿势的一种能力,如单脚站立,用前脚掌支撑地面站立、半蹲等,属于静态的平衡能力;而走步、用前脚掌走、曲线或障碍跑、在较窄的平衡板上行走、原地转圈后停下来等,则属于动态的平衡活动。
南航驾驶人员疲劳检测系统通过建立平衡能力指标体系,将人体疲劳程度与各项平衡指标进行关联,建立人体快速疲劳评估标准及体系,要求驾驶人员在上岗前,在疲劳检测平台上做出相应的姿势,在姿势调节的过程中,人们通常会根据视觉系统、本体觉系统和前庭系统所反馈的信息来维持身体的平衡。若出现疲劳状态和体力损耗,人体的平衡状态会发生变化。
因此,通过疲劳快速检测系统可以对牵引车驾驶员进行作业前疲劳检测并分级,从而大幅降低因驾驶员疲劳因素造成的误操作及后续造成重大损失的风险。此外,驾驶人员疲劳检测系统和牵引车驾驶人员工卡一一对应,形成人员大数据库,为大数据分析提供数据支撑,并可支持指纹识别和人脸识别等功能,具有高效便捷的优点。
3展望
尽管南航开发的飞机牵引车主动防碰撞管理系统及驾驶人员疲劳检测系统在改善飞机牵引车的安全管理方面取得了一定效果,但系统仍有改进空间。未来的飞机牵引车安全管理系统将进一步利用信息和智能技术,将各类雷达(如激光雷达、毫米波雷达、超声波雷达)和视觉检测相结合,进一步提升系统性能。此外,目前的疲劳检测系统是在驾驶员作业前进行检测的,后续可以考虑在驾驶过程中对驾驶员进行实时疲劳检测,发现驾驶员疲劳时便可立即采取措施,以进一步降低事故发生率,提升特种车管理的信息化和智能化水平。
参考文献
[1] 曾鑫.飞行区防碰撞研究[D].中国民用航空飞行学院,2009.
[2] 潘福全,亓荣杰,张璇,等.无人驾驶汽车研究综述与发展展望[J].科技创新与应用,2017(2):27-28.
[3] 孙勇义. Apollo自动驾驶技术与安全设计[J].人工智能,2018(6):48-58.
[4] 李凤娇.无人驾驶车辆综合避障行为研究与评价[D].北京理工大学,2009.
