基于组合图和多尺度时间建模的交通流量预测
2022-04-14王彤彤
黄 怡,王彤彤,王 睿
(四川大学电子信息学院,成都 610065)
0 引言
随着数据采集技术的蓬勃发展,车辆轨迹、道路传感器数据等交通流量数据数量激增。根据历史观测流量结果进行准确、及时的交通流量预测,有助于道路使用者制定更好的出行计划,提高交通运行效率,也有助于交通管理者及时调整道路的时间空间资源,缓解交通拥堵。因此,随着智能交通系统的快速发展,城市交通流量预测得到了越来越多的关注。
过去的几十年间,国内外对交通流量预测的研究不断发展,早期的交通流量预测方法通常采用基于统计模型的方法,例如差分整合移动平均自回归模型、卡尔曼滤波方法等,统计模型方法简单,但较依赖于时间序列的平稳性,并且不能反映交通流的复杂时空特性,因此不能应用于波动较大的数据。随后,基于机器学习的预测方法开始广泛应用与交通流量预测,有近邻非参数回归、支持向量机等,然而,这些方法只考虑时间维度的交通流量信息,而忽略了空间信息对准确预测的重要性。
近年来,基于深度学习的交通预测方法得到了广泛的研究。一些研究人员将交通网络建模为网格,并使用卷积神经网络(CNN)来捕捉空间相关性。然而,由于道路的不规律性,网格建模将不可避免地失去交通网络内的拓扑信息。近几年,研究者将不规则流量数据之间的非欧几里得关系表示为图,采用图神经网络来建模空间特征,如Yu等将将图卷积网络嵌入到卷积神经网络中,Li等将图卷积网络嵌入到递归神经网络中,而Wu等则将图卷积网络和Oord等的WaveNet组合共同捕获时空信息。
图卷积模块的引入尽管解决了空间非欧几里得空间建模问题,但以前的方法仍然忽略了以下两个方面。第一,交通流量是动态变化的,因此功能区相近的道路它们在时间维度上是相近的,以前的图卷积只考虑局部空间信息的相近性,没有考虑到上下文特征的相似性。第二,交通流量预测对长时间时空依赖的捕捉非常重要,因为流量大小在时间维度上是相互关联的,而目前交通流量上通用的门时间卷积网络采用的是卷积核和空洞参数均为1和2的一维卷积,受感受野的局限不能捕捉长时间的时空依赖。
为了解决上述问题,我们的主要工作如下:
(1)提出了一种动态空间图和动态语义图的组合方式。该组合方式同时考虑了交通流量的空间特征动态变化和相近的功能区上下文语义信息的相似性,从而增强了对动态信息和相近功能区信息的捕获。
(2)提出了一种多尺度时间卷积网络模块。该模块采用了多种卷积核和空洞参数设置,使得模型可以捕获到不同长度时间依赖。
(3)在METR-LR和PEMS-BAY两个公开数据集上的对比实验结果表明,我们的模块的准确度优于先前的模型。我们还对模型的模块进行了消融实验,分析了每个模块对结果的影响。
1 模型实现
1.1 问题定义
交通流量预测是一类时间序列的预测问题。其中,交通道路网络由于其非欧几里得特性,可以表示为图(,,A),其中={,,…,v}表示交通网络的个传感器节点采集的数据集合,表示交通道路的边缘集,A∈R 是由图导出的邻接矩阵。定义图信号X∈R 为在t时刻观察到的图信息,其中是传感器采集的数据维度。交通流量预测即可定义为:学习一个非线性函数,在时刻开始,从道路上的个传感器的前个时刻数据预测出下个时刻的交通速度。公式形式表示如下:

1.2 整体模型
本文参考了Wu等人的GraphWaveNet网络架构,其整体网络由多个叠加的时空层和一个输出层组成。首先由一个线性层进行转换,随后进入一个门控时间卷积网络(TCN)和一个自适应空间图卷积网络(SG-GCN)的串联的时空层,每层时空层又以跳连接的方式组合,最后经过两层全连接层输出结果。我们在GraphWaveNet上做了一些改进。将其中的门控TCN转变为多尺度门控时间卷积模块(Gated MS-TCN),将之前的自适应空间GCN添加了一个自适应语义GCN模块(TG-GCN)进行并联,得到一个自适应空间语义GCN模块(MG-GCN)。我们将改进的网络称为基于组合图和多尺度时间卷积网络,其网络总体结构如图1所示。

图1 基于组合图和多尺度时间卷积网络
1.3 自适应空间语义图模块
我们模型的多图组合的动态图卷积模块由两个模块并联而成,分别为自适应空间图卷积模块(SG-GCN)和自适应语义图卷积模块(TGGCN),其中SG-GCN引用自Wu等的论文,它是一个自适应邻接矩阵和一个有向空间邻接矩阵的组合。我们在此基础上设计了一个TGGCN进行并联。TG-GCN的和语义邻接矩阵组成。
自适应邻接矩阵:包含了两个可学习参数E,E∈R,这两个参数首先进行随机初始化,然后随模型通过随机梯度下降进行端到端的学习,让模型自身学习隐藏的空间依赖关系,因此可表示为

语义邻接矩阵:由于某一区域的交通流量不仅与其周围的局部空间有关,相似功能区的流量变化在时间维度上还具有相似性,为了捕获这种时间上的相似性,我们使用了动态时间规整(dynamic time warping,DTW)算法来计算一个语义邻接矩阵,判断节点是否为语义邻居。
DTW可计算两个不同长度、不同节奏时间序列的相似度,通过动态规划来自动扭曲时间序列,使其在时间轴上进行局部缩放,来达到使两个序列尽可能一致的效果。如图2所示,从两条速度变化曲线可以看出,相比于同一时刻的速度和,速度与具有更强的相似性。

图2 两个交通流量序列的欧氏距离和DTW距离对比
用DTW算法具体步骤即为:对于两个时间序列=(,,…,x)和=(,,…,y),首先计算两个时间序列各个点之间的距离,得到一个距离矩阵∈R,其次,寻找一条从两个时间序列开始位置(1,1)到结束位置(,)的一条路径,使得路径上的元素最小。其起始条件为:

再次,通过动态规划算法递归,得到后续从矩阵左上角(1,1)到任一点(,)的最短路径长度为(,):

递归完成后,计算序列和的DTW距离dist(,):

dist(,)越小,表示两个序列和的相似度越大。
根据DTW距离的值来生成语义邻接矩阵A,其生成规则如下:
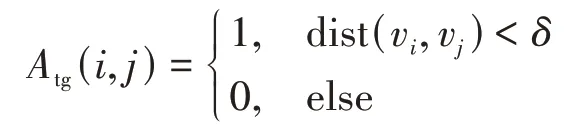
其中,是一个门限值,用于判定两个交通流量序列在(,)点是否为语义邻居。则语义邻接矩阵可以用来表示两个序列中具有相似时间模式的节点。
自适应语义邻接矩阵:我们的模型将语义邻居和自适应邻接矩阵组合,得到一个自适应语义邻接矩阵A,从而可以在训练过程中动态的判定两个交通流量序列的相似性。其中语义邻接矩阵可以指导自适应邻接矩阵中参数的学习方向,而自适应邻接矩阵也可以反过来动态修正语义邻接矩阵的精度问题:

我们的自适应空间语义图模块将自适应空间邻接矩阵和自适应语义邻接矩阵分别引入图卷积网络(GNN)中,各自获取到交通流量数据的空间特征和语义特征,最后将两者组合起来,得到空间和语义的融合信息。
1.4 多尺度时间卷积模块
在交通流量预测中,下一个时刻的流量数据和上一个乃至多个时刻的信息是具有很强的相互关联性的,因此捕获长时间的依赖关系至关重要。而目前现有的时间卷积网络模块大多是采用具有固定大小为1×1的卷积核,以空洞参数为1和2交替进行时间建模,感受野的范围有限,仅能学习到前一两个时间单元的流量,不能很好地捕获长时间跨度的交通流量信息。
针对感受野范围过小的问题,我们设计了一个多尺度的时间卷积网络模块(MS-TCN),如图3所示。该模块在卷积核大小与空洞卷积两个方面同时对感受野进行了多个尺度的扩张,从而可以在不同的时间跨度捕获时间维度的交通流量信息。而且相比于仅从空洞数方面扩张感受野,从扩大卷积核和空洞数两个方面的扩张可以防止一些关键信息的丢失。
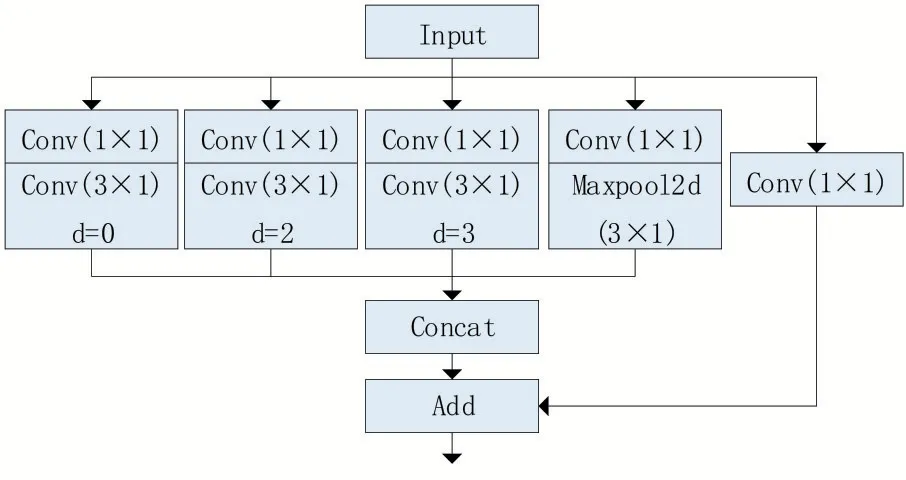
图3 多尺度时间卷积网络模块(MS-TCN)
具体地,输入交通流量数据首先分别进入四个卷积核大小均为1×1的卷积和Relu层,之后前三个分支分别进入空洞数为0、2、3的3×1的卷积中,通过不同大小的感受野学习信息,而第四个分支则采用了3×1的最大池化,提取3个时间维度中具有最突出信息的特征。最后,将四个分支进行合并,得到多尺度融合的特征信息。除此之外,我们还引入了一个残差分支,将其进入一个1×1的卷积后和主干汇合,其目的是加速网络的收敛。
2 实验相关设置
2.1 数据集
本文采用了两个公开的交通数据集作为多图和多尺度时间建模网络的验证,即Li等提供的METR-LA和PEMS-BAY。其中,METR-LA是在2012年3月1日至6月30日这段时间内,于洛杉矶县高速公路交通速度的207个传感器收集的交通速度数据;PEMS-BAY是从2017年1月1日到5月31日内在湾区公路的325个传感器上采集的速度数据。
2.2 评估指标
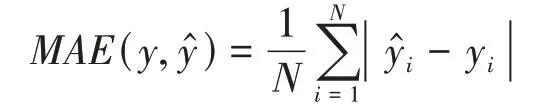
我们采用了以下三个指标进行模型评估,其中和̂表示交通流量的实际预测值和实验预测值,表示数据总数。
(mean absolute error,MAE):表示模型预测的交通流量数值与实际数据集中交通流量数据的平均速度差。定义如下:
(mean absolute percent⁃age error,MAPE):表示各个预测交通流量值与实际数据集数据的平均速度差与实际数据集数据之比,定义如下:

(root mean squared error,RMSE):表示模型预测的交通流量数值与实际数据集中交通流量数据的期望值。定义如下:
2.3 实验设置
为了和之前的一些交通流量预测方法进行公平地比较,我们将数据集分为了训练集、验证集和测试集,两个数据集分割比例均为7∶2∶1,并且1小时12个连续时间步长的历史数据用于预测下一小时的12个连续时间步长数据。我们在NVIDIA 1080Ti GPU下进行了实验,总体模型基于Pytorch实现,数据集批量大小设置为64,权重衰减、随机失活率、初始学习率分别为0.0001、0.25和0.001。训练时的优化器采用Adam优化器,训练周期迭代数为100。
3 实验结果及分析
3.1 消融实验
为了证明引入的自适应空间语义图模块和多尺度时间卷积模块的有效性,我们在两个数据集上分别进行了消融实验。其中对比的baseline是Wu等的GraphWaveNet,TG-GCN是在base⁃line中加入了自适应语义邻接矩阵的图卷积模块,MS-TCN是在baseline中加入了多尺度时间卷积网络模块,TG-GCN+MS-TCN是在baseline中加入了自适应语义邻接矩阵的图卷积模块和多尺度时间卷积网络模块,实验结果如表1所示。
从表1可以看出,单独加入TG-GCN和MSTCN时,模型三个评估参数都较baseline有了一定下降,说明了我们加入的模块的有效性。并且单独加入MS-TCN时,预测的效果更好,说明长时间依赖的捕获对于提升预测精度具有更重要的影响。与此同时,将TG-GCN和MS-TCN模块同时加入基础模型,得到的效果优于baseline和两个模块单独放入的预测效果,这说明加入的两个模块的左右没有发生抵消。总体来看,我们的模型的预测效果总体上有所提升。

表1 消融实验结果
3.2 实验结果
我们将本文的模型与baseline模型在两个数据集上的实验结果进行了比较。实验结果如表2所示。

表2 多个模型性能比较
两个数据集的验证中,我们的模型的MAE、RMSE和MAPE三个评估结果都有不同程度的下降,模型在一定程度上降低了预测误差,说明引入的自适应空间语义GCN成功捕获时间维度的语义信息,而多尺度TCN获取了长时间依赖信息,提升了预测结果的准确性。
4 结语
本文针对交通流量预测模型中时间维度语义信息缺乏的问题,提出了一种将自适应空间信息和自适应语义信息组合的图卷积模型,其中引入的自适应语义信息GCN通过DTW得到语义相似性矩阵来寻找语义邻居,然后通过自学习的方式实现语义信息的自适应。同时提出了一种多尺度TCN,通过多个不同卷积核和空洞数的卷积并联,不同程度的扩大感受野,以确保对长时间时空依赖的捕获。在两个真实场景数据集上实验结果表明,我们的模型有效地提高了交通流量预测的准确性。