设施内自主移动装备导航控制技术研究进展**
2022-04-13姜赛珂张美娜李雪祁雁楠吕晓兰
姜赛珂,张美娜,李雪,祁雁楠,吕晓兰
(1.江苏省农业科学院农业设施与装备研究扬,南京市,210014;2.江苏大学农业工程学院,江苏镇江,212013;3.农业农村部长江中下游设施农业工程重点实验室,南京市,210014)
0 引言
设施农业作为一种环境可控、高效集约的现代农业生产方式,具有高产出、高效率以及可持续发展的优势[1-3]。
目前,我国设施建设继续向大型化、规模化发展,设施装备向机械化和智能化发展[4]。在设施种植、喷灌、采摘、巡检等方面,传统作业方式劳动强度大、作业效率低,且存在部分安全隐患[5-6]。随着科学技术的发展和劳动力成本的不断提高,自主移动装备在设施中的应用范围越来越广[7-10],使得整体作业效率、作业安全性和监测信息精准性得到极大提高。面对设施复杂环境,装备在设施中如何安全、快速、有效的路径规划和移动成为设施自主移动装备应用的首要难点,研究设施自主移动装备导航方式对我国设施装备发展研究具有深远意义。为此,本文从设施自主移动装备类型与应用、设施自主移动装备导航技术发展两方面展开评述。
1 设施移动机器人类型与应用
1.1 喷灌与植保装备
设施内作物喷灌、植保不同于大田作业,设施空气流动性差、温湿度高且相对封闭,人工作业时存在较大的安全隐患[11]。
国外很早就开始了喷灌、植保装备的研发应用,其中美国的ITS喷灌机(图1)在我国进口喷灌机市场占有率最高,该型号喷灌机已实现了微电脑编程控制器控制[12]。

图1 ITS双轨喷灌机Fig.1 ITS dual-track sprinkler
国内部分厂家结合国外先进机型研发出PG系列、IR系列(图2)等多款悬挂轨道式喷灌机型,并且喷灌机利用组合逻辑和电磁信号实现高自动化控制[13-14]。

图2 IR系列喷灌机Fig.2 IR series sprinkler
悬挂轨道式喷灌机的应用极大解决了设施无人喷灌问题,但依旧摆脱不了至少一室一台的喷灌需求,且轨道生产布置成本相对较高,逐渐地,越来越多的地面移动式喷灌、植保机器人发展起来。
表1为不同导航形式的部分设施移动喷灌植保装备情况。
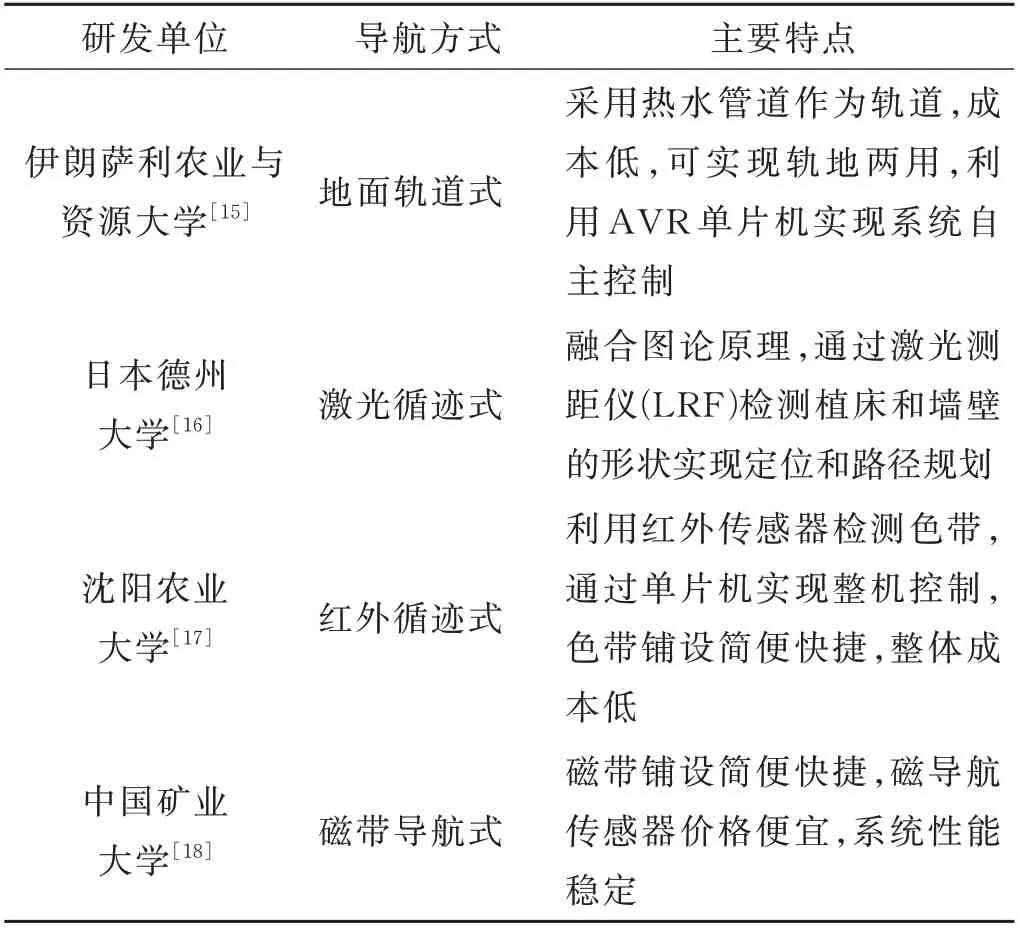
表1 地面移动式喷灌与植保机器人Tab.1 Ground mobile sprinkler irrigation and plant protection robots
1.2 采摘与运输装备
设施作业空间小,常用户外采摘、运输机械平台在设施内无法正常使用,只能通过人工完成。人工作业不仅增加了投资成本,同时工作效率低、劳动强度大等弊端也日益显现,越来越多的研究机构和科研单位逐渐投入到设施采摘、运输装备的研发[19-20]。设施采摘机器人主要由移动平台和采摘机构两部分构成,移动平台不仅要完成全局路径规划,同时还要满足采摘机构适宜的速度、位置条件,因此,其路径规划和运动控制部分更加复杂。
表2展示了部分典型采摘机器人的相关技术参数。
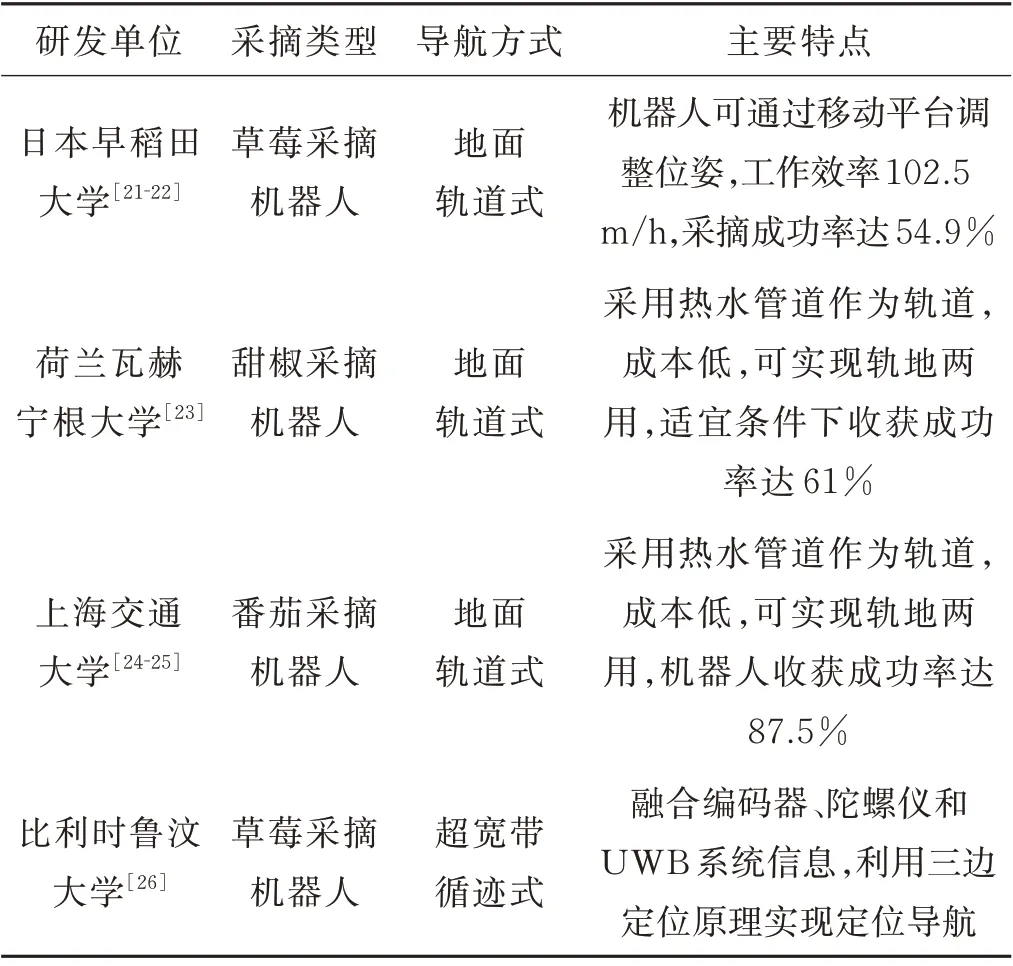
表2 典型收获机器人研究成果Tab.2 Research results of typical harvest robots
1.3 巡检装备
设施作物生长感知和环境数据监测是设施农业智能化管控的两个关键环节,一套完整的温室传感设备费用高、线路复杂、维护难度大,不适合设施大批量使用。巡检装备通过在移动平台上安装温湿度传感器、二氧化碳传感器、高光谱相机等传感监测设备,能够实现在设施内移动监测,极大降低了应用成本和使用难度[27]。如图3扬示,福建省首款人工智能农业机器人在蔬果大棚全天候巡检作业。

图3 福建省“小睿”巡检机器人Fig.3“Xiaorui”inspection robot of Fujian Province
现有设施巡检装备有轮式巡检装备、轨道式巡检装备和无人机巡检装备,由于温室空间小、障碍物多,因此,无人机巡检应用相对较少。刘艳昌等[28]以四轮轮式机器人为载体、FPGA控制器作为采集控制终端设计出一款温室大棚巡检机器人,该机器人具备手动和自动两种控制方式,手动控制利用红外遥控器、现场触摸屏等控制面板实现,自动控制利用机器人身上的超声波传感器、红外传感器和接触传感器获取障碍物信息,经无线模块将环境信息传送给终端电脑后得到路径规划,从而实现温室内行走避障。皮杰等[29]设计一款基于多维传感器的悬挂式轨道巡检机器人,机器人在两个电机的驱动下在C型滑道中运动,当红外传感器监测到前方有障碍物时,机器人通过垂直方向的伸缩机构实现避障,为了进一步增强避障可靠性,在机器人上设置了弹簧式电触头和滑触线。
2 设施可自主移动装备导航技术
2.1 固定轨道式导航技术
2.1.1 地面轨道式
地面轨道式导航通过在温室地面架设导轨实现装备移动,由表1、表2可以看出,因其结构简单、安装方便、操作容易,扬以在设施内应用较广[30-35]。田素博等设计了一款多功能可升降轨道作业车,作业车经纵向行走轮实现轨道运动,为避免作业车在轨道运行时左右摆动和卡轨,纵向行走轮利用联轴器与传动轴相连,同时采用仿形设计和仿尼龙材料以减小震动,作业车换道作业通过横向行走轮实现轨道间的转移。地面铺设轨道为前期的安装应用带来了便捷,但其只适用于短距离固定路线,长距离应用不仅增加了轨道成本,对设施地面也造成了破坏,阻碍其他设施地面装备应用。因此,该导航方式不适合设施长期大规模应用。
为了降低温室轨道安装成本,同时减小轨道占用空间,越来越多的轨道装备采用供热管道作为其运行导轨[36-39]。日本爱媛大学Balaso等[40]设计了一款既可沿温室供热管道运行又可在地面运行的多功能机器人(如图4扬示),该机器人通过校正轨道导轮驶入管轨,然后利用车身前后的小轮实现机器人在管轨上的运行。导航运行控制方面,通过距离传感器实现线路跟踪,采用光电传感器识别车辆驶进车道和驶离车道的转弯位置,利用超声波传感器识别障碍物。

图4 多功能机器人Fig.4 Multi-functional robot
2.1.2 悬挂轨道式
悬挂式作业方式因为不占用设施生产面积同时不影响其他机具作业而被广泛应用于设施喷灌[41-46],在导航关键部件上,主要有轨道和跨间转移装置两部分。
根据支撑喷灌机轨道数目的不同可将其分为双轨式喷灌机和单轨式喷灌机,轨道形状又可分为圆形轨道、方形轨道、凹槽型轨道等,表3对不同轨道形状的单双轨喷灌机优缺点进行对比。
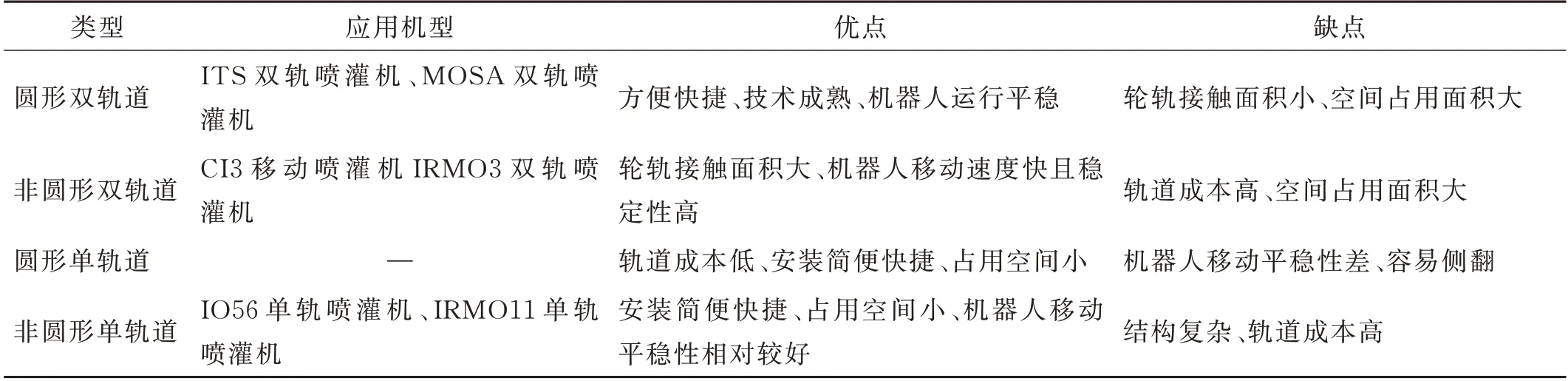
表3 悬挂式轨道喷灌机优缺点对比Tab.3 Comparison of advantages and disadvantages of suspended track sprinklers
由表3可以看出,考虑到装备在设施工作中的安全性,双轨道和非圆形单轨道在设施应用更多,圆形单轨道虽然在成本上更加低廉,但在安全性上大打折扣,研发安全可靠的防侧翻装置是圆形单轨道导航未来推广使用的关键。
悬挂轨道式导航除了轨道形式对其应用影响重大,轨道间的跨间转移装置也是其关键部件,跨间转移装置可以使悬挂式装备从一个轨道转移到其他轨道进行作业,增大装备的作业范围[47]。Lucas[48]设计了一款可跨式单轨喷灌机,换轨轨道位于喷灌机作业轨道起始位置的上方,且与作业轨道垂直,当喷灌机需要换轨时,将其移动到作业轨道起始端,利用换轨轨道上的换轨车手动实现喷灌机轨道转换。张晓文等[49]设计的双轨自动转移装置工作原理与上述类似,但其通过在轨道、喷灌机和跨间转移装置安装传感器设备,实现了喷灌机不同轨道间的自动转移。张二鹏等[50]在喷施机和换轨车上安装SIMENS S7-200 PLC,融合多传感器定位技术,利用PLC控制器PPI通信和MODBUS通信实现了整体全自动协调工作,控制系统原理图如图5扬示,经试验,当换轨车移动速度达0.15 m/s时,单次换轨时间为185 s。
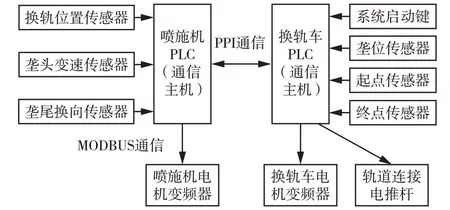
图5 控制系统原理图Fig.5 Schematic diagram of control system
总体来说,不论是地面轨道式导航还是悬挂式导航,装备导航路线都受轨道安装位置影响,一方面降低了装备在设施应用中的导航难度,减少了前期研发成本;另一方面,装备的应用范围受到严重限制,一旦轨道安装好,后期很难实现轨道路径更改。
2.2 循迹式导航技术
2.2.1 磁导航
磁导航分为电磁导航和磁带导航,电磁导航在规划路径地下埋设金属导线,当有高频电流通过时产生电磁,可移动装备通过携带的电磁传感器实时检测磁场强弱变化,从而指引其按规定路线运动;磁带导航是通过在地面粘贴磁带替代在地下埋设金属导线。刘涛等[51]采用组合式电磁传感器设计了一款温室电磁导航机器人,机器人的前进和后退分别安装不同电磁传感器组,且布置位置和机器人的行走方向成一定角度,使得机器人在前进和后退时,传感器始终位于车轮前面,传感信号和诱导线的偏移距离呈线性关系,机器人的可靠性、安全性、抗干扰能力提高。由于金属导线埋在地下,外加环境噪声,扬以感应出的电动势信号相对减弱。许童羽等[52]研制出一款日光温室自主寻迹喷药车,首先通过信号处理电路对信号进行选频、放大,然后采用PID模糊控制算法调整喷药车寻迹转向,经测试,喷药车只有在40°~90°轨迹线上才能百分之百转弯成功。潘坚栋等[18]基于模糊控制理论设计出一种用于温室地面移动式喷灌机的导航控制系统,试验表明,当喷灌机与磁带的相对偏移角小于25°时,喷灌机才能有效调整自身速度实现与磁带的重合。
磁导航相比轨道式导航路径规划更加简单、灵活,不论是在地下铺设导线还是在地面粘贴磁带,其安装成本均低于轨道铺设,但该种导航方式依旧受固定路径限制,移动装备只能沿着导线或者磁带移动,制约设施自主移动装备应用范围。
2.2.2 视觉循迹
视觉导航分为两种循迹方式,一种是利用摄像机识别导航标签进行自主导航,另一种是通过摄像机采集温室环境信息,然后对采集后的图像数据进行分析处理,最后利用Hough变换确定出机器人的导航路线。通过第一种方式,杨振宇等[53]设计了一款黄瓜收获机器人,王鹏等[54]将QR码加入其中提出了一种新的组合视觉导航方法,在直线路径粘贴红色导航线,转弯处粘贴QR码,这种方法不仅提高了机器人的转弯速度和精度,同时,QR码还可以储存其他决策信息,降低了机器人的控制难度。
基于Hough变换的视觉循迹中,王红君等[55]选取RGB色彩空间的(R-G)(G-B)图像和HIS色彩空间的H分量,并对其分别利用OTSU最大类间方差法自动阈值分割,这种方法简单快速,同时减弱了噪声和农作物行缺失对导航带来的影响。Nissimov等[56]采用Kinect 3D传感器,结合图像深度信息和纹理特征,利用像素的斜率、强度和周围像素的信息进行障碍物检测决策,从而为机器人规划出有效行进路径。温室光照条件变换较大,常用的几种色彩空间中,RGB和CMY难以适应,HIS中只有I分量受光照影响,白如月等[57]利用改进的K-means聚类算法对HIS色彩空间的H和S分量联合分割得到完整的道路区域,采用Candy算子检测边缘离散点信息后根据任永新等[58]改进的Hough变换拟合出机器人的导航路径,另外在机器人前轮安装光电开关和编码器检测转角,通过模糊控制方法实时调节机器人在运动时的转向。张群等[59]把RGB图片转化为Lab图像,利用Lab中的a通道数据信息进行灰度化,然后利用形态学处理和分水岭算法对灰度图像分量、分割,将其转化为二值图像后经Hough变换得到导航路径,这种方法不仅减小了光照条件对路径识别带来的影响,同时图像形态学处理和分水岭算法的应用提高了Hough变换对路径规划的准确率。Chen等[60]基于改进的灰度因子和Otsu方法进行图像分割,实现了对土壤和植物的有效分割,并采用形态学处理填补二值图像中的漏洞,以保证离散导航点的精度,根据二值图像中白色像素点的相对坐标中心提取导航点,最后,采用中值点Hough变换方法拟合导航路径。为了更加快速准确地拟合导航路径,Chen等[61]在前期研究基础上又从实时性和鲁棒性两个方面对传统Hough变换进行改进,利用回归方程确定预测点,通过预测点Hough变换拟合导航路径,试验表明,这种方法相比传统的Hough变换减少了35.20 ms。
2.2.3 激光循迹
激光雷达因其高精度、高频率、实时性等优点逐渐成为机器人自主定位导航的主流传感器。由于温室道路区平整度远高于作物区,激光测距仪扫描道路和作物得到的数据有很大的波动性差异,贾士伟等[62]利用此差异检测出道路边缘,借助道路基准宽度帮忙去除伪道路区域,然后生成速度调整指令,使得机器人沿道路安全行驶,但该方法很难适用于温室复杂道路。
2.2.4 无线循迹
无线循迹导航技术在设施领域内起步较晚。Widodo等[63]首次将基于声波的局部定位系统应用到设施。初期声波定位系统基本配置采用类似全球定位系统的模块,在固定位置安装四个扬声器作为基站,并将一个扬声器作为移动基站。
同室内办公环境相比,设施精确测距系统受湿度、温度、风以及障碍物等影响较大,为此,Widodo等[64]利用人工神经网络(ANN)补偿多径效应引起的测量误,后期又在此基础上又提出了一种可自行校准的声波温室定位系统(如图6扬示),该系统除了可以自行校准,而且可以进行风力补偿。Shiigi等[65]使用基站补偿温度误差,但这种方法多适用于诸如草莓这类茎叶较短的植物,当用于番茄之类植物时,植物就会变成障碍影响定位精度。Tsay等[66]利用声速估计算法实现温度补偿并嵌入扩频声波定位系统,这种温度补偿方法不仅不需要设置温度传感器,而且与基于传统温度传感器测量的补偿方法相比,具有相似甚至更好的定位精度。
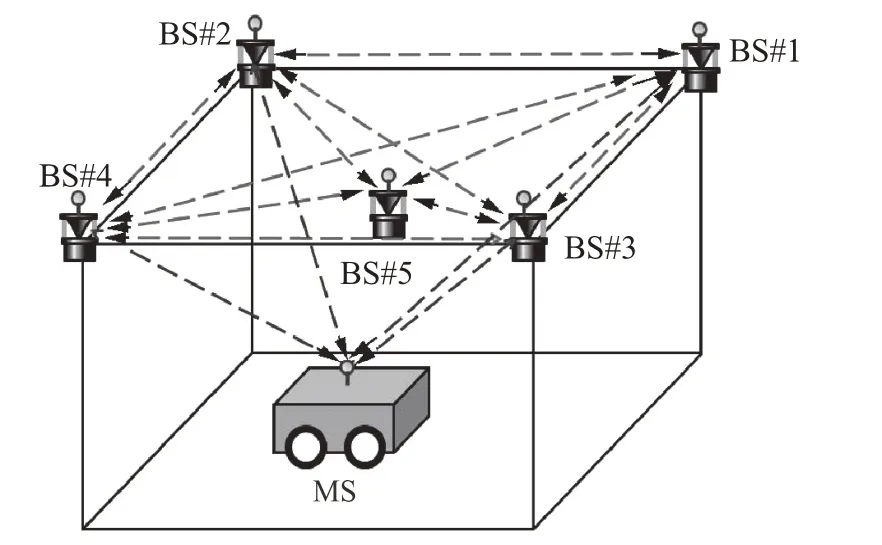
图6 可自行校准的声波温室定位系统Fig.6 Self-calibrating acoustic greenhouse positioning system
除了上述的声波定位导航,基于无线技术的定位导航还包括无线局域网、射频识别、超宽带、蓝牙和超声波[67],表4介绍了它们的工作原理和优缺点。
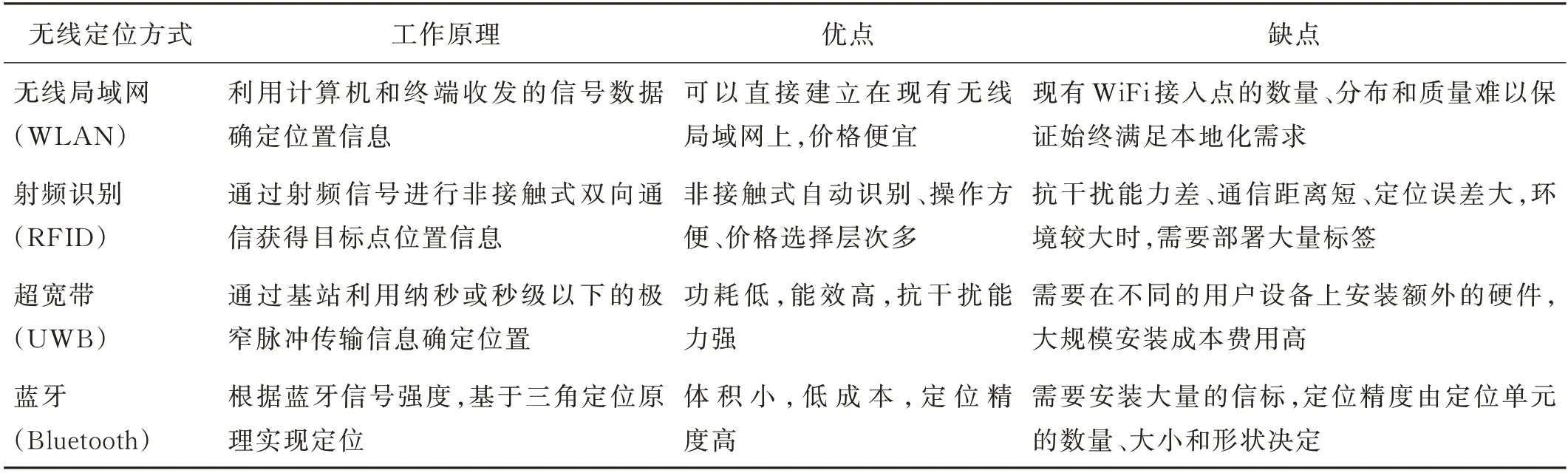
表4 无线定位工作原理及优缺点Tab.4 Working principle and advantages and disadvantages of wireless positioning
由表4可以看出,单一的无线定位方法在应用时缺点很明显,为了弥补不足,越来越多的学者融合不同传感设备、处理算法和定位方法为一体,形成各种组合式无线定位导航方法。Preter等[26]设计出一台草莓收获机器人(如图7扬示),通过安装在机器人车身的UWB室内定位系统、车轮编码器和陀螺仪实现在温室的定位导航。为了获得更加精准的UWB定位信号,基于TDOA测距算法,林相泽等[68]采用K-means聚类与截段处理方法分别对测量信息进行动静态优化求解,优化后的算法明显提高了定位精度。王勇等[69]提出了一种UWB/陀螺仪组合的导航定位算法,并将其应用到温室喷药机器人上,经试验,机器人直线行走偏差不超过6 cm,航向角偏差不超过5°。为适应狭小空间温室自主导航作业平台矩形路径追踪转向改变,姚立健等[70]重新定义前视距离,对传统追踪模型进行改进,提出了一种基于UWB无线定位的路径跟踪方法,经实车试验,直线追踪稳态偏差均值为6.3 cm,矩形追踪稳态偏差均值为20.6 cm。赵辰彦等[71]利用二元三次多项式对UWB无线定位误差进行拟合修正,利用带有自调整函数模糊控制器输出前轮转角,经过样机试验,直线跟踪稳态偏差为4.7~6.4 cm,矩形路径偏差均值为14.4 cm。

图7 草莓收获机器人UWB导航锚Fig.7 UWB navigation anchor of strawberry harvesting robot
循迹式导航是设施机器人智能化发展的重要一步,也是目前设施智能机器人研发应用最多的导航方式。在导航精度方面,不仅受传感器精度影响,同时也与图像、数据处理算法息息相关,研发高精度、低成本的传感设备,开发高效、稳定的处理算法是循迹式导航进步的关键。除此之外,循迹式导航需要在设施内安装各类传感设备,随着设施面积的增大,对传感器的数量要求也在增大,从而增大了应用成本。因此,研制集多源传感器于一身的机器人将是未来设施农业智能化发展的重点。
2.3 基于SLAM技术的多源数据融合式导航技术
2.3.1 SLAM技术简介
SLAM(Simultaneous Localization and Mapping),即同时定位与地图构建,机器人在未知环境中利用自身携带的传感器(惯性测量单元、里程计、视觉传感器或激光传感器)实现环境地图构建和自身位姿估计,有效解决机器人在陌生环境下的自主作业,是目前机器人自动化领域的研究重点[72-73]。从1986年起,SLAM技术历经古典时代、算法分析时代和鲁棒性时代,相比初期,现有的SLAM技术更加重视智能化和自动化发展,为移动机器人在不同环境下的运行带来了技术方向[74]。经过30多年的研究发展,SLAM技术已逐渐应用到各大领域,常见的有:扫地机器人、交互机器人、巡检机器人、无人驾驶等[75-77],但在设施中的应用相对较少。根据机器人扬搭载传感器的不同,SLAM技术分为了视觉SLAM技术和激光SLAM技术。
2.3.2 视觉SLAM导航
视觉传感器因其小巧的体积、低廉的价格、能够获取丰富的环境信息等优势成为当前SLAM研究的热点,根据视觉传感器的不同,可将视觉SLAM分为三类:单目视觉SLAM、立体视觉SLAM和RGB-D SLAM[78],表5分别对这三种视觉传感器进行了对比分析。在技术处理流程上,视觉SLAM一般分为前端处理、后端处理和闭环检测三个部分。截至今日,成熟的室内视觉SLAM算法有ORB-SLAM、LSD-SLAM、MonoSLAM、RGBD-SLAM等[79-80]。

表5 视觉传感器工作原理及优缺点Tab.5 Working principle and advantages and disadvantages of vision sensor
由表5可知,单目相机无法获取环境深度信息和尺度信息,RGB-D相机多适用于室内环境,而设施环境复杂,受动态障碍和环境噪声等因素影响,很容易出现追踪数据丢失、累计误差大等问题,对此,胡焉为等[81]提出了一种基于信标识别和双目视觉的SLAM定位算法,首先在温室转弯等关键位置铺设人工信标,人工信标辨识度、准确度都高于自然特征点,因此增大了先验位置精度,然后利用双目相机获取图像信息,根据信标定位信息和特征点匹配信息计算位姿初值,利用图优化框架优化局部和全局位姿,经试验,该算法误差能保持在5 cm之内。为增强定位导航精度,在未来,视觉SLAM技术在设施中的应用应多实现与惯性测量单元、GPS、激光雷达等不同传感器之间的相互融合[82]。
2.3.3 激光SLAM导航
激光SLAM技术根据扬采用数学优化框架的不同分为基于滤波器(Filter-based)和基于图优化(Graph-based)两大类。其中室内2D激光SLAM算法中,基于滤波器的激光SLAM使用最广泛的是Gmapping方案,它以Fast SLAM方案为基本原理,在空间较小的环境能够实现较好的建图效果,不足之处是该方法过度依赖里程计信息[83]。
Konolige等提出首个基于图优化框架的开源方案Karto SLAM,谷歌对其优化提出了Cartographer开源方案,此外,Kohlbrecher等[84]还提出了Hector-SLAM方案,该方案与Gmapping方案相比,不再使用里程计数据,但对激光传感器的测量频率有了更高的要求。侯加林等[85]基于ROS系统设计出一款双激光雷达温室运输机器人(图8),机器人的头部和尾部分别各安装了一个二维激光雷达,水平扫描范围达360°,可快速获得机器人前后的扬有环境信息,并采用Cartographer开源算法定位建图;导航方面,全局路径规划采用Dijkstra算法,局部路径规划采用DWA算法,经过试验对比,双激光雷达的建图效率和实时避障能力均优于单个激光雷达,机器人导航精度满足温室运输导航定位需求。
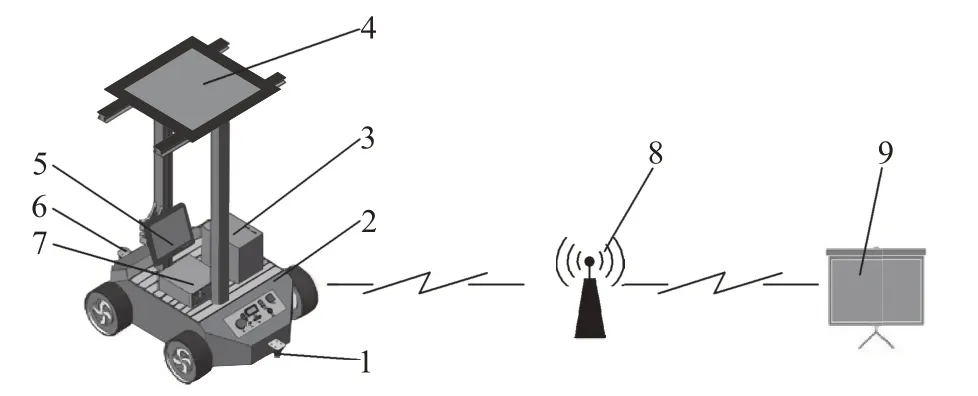
图8 运输机器人导航系统组成结构图Fig.8 Composition and structure of the navigation system of transport robot
除了2D激光SLAM,3D激光SLAM也是当下SLAM研究中的一大热点。3D激光SLAM技术因能够获取到更多的环境信息故多用于室外环境,典型的开源方案是LOAM[86]。设施环境介于室内环境与室外环境中间,环境相对复杂且有动态障碍物,但面积较小,3D激光SLAM技术在设施中具有极大的应用前景。
3 总结与展望
随着传感器技术和控制技术的发展,设施自主移动装备导航方式经历了导轨式、循迹式和基于SLAM技术的多源数据融合式。总体而言,导轨式和循迹式自主导航方式成本高、路线固定,不利于设施机器人自由移动和实时避障,基于SLAM技术的多源数据融合式导航不需要提前铺设导轨、磁条、引导线等,只需要使用时利用各类传感器收集数据,然后对数据进行融合处理,通过导航避障算法即可实现路径规划,完成自主运动,是未来设施机器人导航方式发展的趋势。同时,5G、云平台、大数据等高新技术的发展也为自主移动装备导航过程中数据传输、处理和存储等提供了更加有利的条件。结合我国当前设施自主移动装备发展现状,提出以下几点展望。
1)机器人采用电力驱动。设施空间封闭性强,传统燃油动力输出产生的废气无法快速排除,从而滞留在设施内对作物生长产生危害,因此,选择绿色环保的驱动装备是设施移动机器人的首要选择。为解决机器人充电问题,可结合机器人电池续航能力和设施环境大小,设立充电站,传统的有线充电还需人工操控,耗时耗力,研究设施内无线充电系统可有效解决这一问题。
2)机器人设计小型化、模块化。设施环境复杂,机器人体型过大,不利于机器人在设施内作业移动,小型化设计增大了机器人的适用范围。机器人整体结构复杂,模块化的设计可使机器人的操作维修更加简捷,增大机器人的使用效率。
3)重点研发设施SLAM技术。SLAM技术在其他场合已经有了比较成熟的应用,SLAM技术在设施中的应用将减免设施机器人轨道、引导线、基站等的布置安装,节约使用成本、增大机器人的适用范围和活动空间。在未来,可融合视觉传感器、激光雷达、IMU、里程计等多传感器为一体,结合UWB、WLAN、Ultrasound等技术,开发精度更高、效果更好的SLAM算法。
4)发展多功能通用移动平台。设施移动机器人末端执行机构的不同决定了该机器人的应用类型,但机器人的移动平台具有共通性,建立设施布局标准,设置适合设施内自主移动的机器人尺寸,并在上面提前设置各类通信、安装接口,进一步方便不同执行机构和传感设备的安装和使用。研发多功能通用移动平台可极大降低机器人研发应用成本。
