果园仿形风送喷雾机构设计与试验**
2022-04-13房开拓周良富尤丽华
房开拓,周良富,尤丽华
(1.宿迁学院机电工程学院,江苏宿迁,223800;2.南京工业职业技术大学工程技术实训中心,南京市,210039;3.江南大学机械工程学院,江苏无锡,214122)
0 引言
风送喷雾是当前果园施药最常用的施药技术。目前,果园风送喷雾中的气流道形式主要有环向出风式、塔式、柔性管多头式和独立圆盘式等,这些风送装置由果树种植的特定模式而设计,机具的喷雾头大都固定于机架上,风送喷雾装置不能根据果树的位置进行调节,造成沉积在叶片单位面积上的药液极不均匀,导致局部过量喷施和防治效果不佳现象,严重影响果品品质。
喷雾距离是影响喷雾效果的重要技术参数之一,根据果树冠层结构实时调节喷雾距离,实现对冠层的仿形喷雾是广大学者研究的热点课题。Osterman等[1]设计风送喷雾几何位置在线调节装置及其控制算法,该装置显著提高农药有效利用率,降低农药飘移。宋淑然等[2]设计果园柔性对靶喷雾样机,测试了不同控制方式下的雾滴沉积率,结果显示最高雾滴沉积率达到88.4%;周良富等[3]针对篱笆型果树特点,设计一种仿形喷雾架,通过驱动电动丝杆实现雾化器的上下左右调节,试验结果得出组合喷雾执行装置完成升降、伸缩和旋转的时间分别为51.3 s、50.5 s、26.5 s,但该装置依然难以实现喷雾位置的在线调节。Zaman等[4]研制了双臂式机械结构与单片机控制的仿形喷雾试验样机,可以适应不同喷雾对象;Tumbo等[5]采用自适应模糊控制算法,设计一种以单片机为核心的非接触式仿形喷雾位置控制系统;李杰[6]研制仿形喷雾样机,得出不同喷雾距离下雾滴的运动特性,雾滴除了在果树底部分布较少,其余部位分布更均匀;李龙龙等[7]研发基于变风量与变喷雾量的果园自动仿形喷雾机,实时调整喷雾头流量和送风速度实现仿形变量喷雾;房开拓[8-9]设计一种结构上能够对果树树冠实现多自由度、立体式仿形机构,满足不同种类果树施药需求。
以上研究初步实现了风送仿形喷雾,农药有效利用率得到提高,为本研究提供理论基础与试验指导。但这些机具可调的空间位置都相对单一,无法根据果树实际形貌调整喷雾头位置和姿态,难以获得最佳喷雾距离和喷雾方向。本文从如何提高喷雾机构柔性入手,研究果树仿形施药过程,重点考虑雾化器空间位姿调节功能,设计多自由度仿形多杆机构,以提高冠层雾滴沉积特性为目标,开展机构优化、理论分析与试验验证等研究,以期为喷雾机具研发与应用提供技术支撑。
1 仿形喷雾实施方案
1.1 机构性能设计
根据标准纺锤形果树的几何结构参数,确定仿形机构的调节范围等工作特性,实现喷雾位置和喷雾方向的精准调节,具体要求的技术指标如表1。
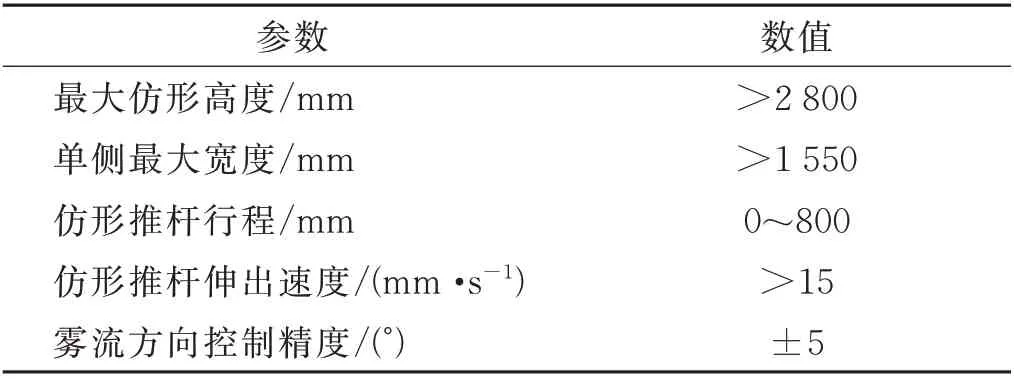
表1 主要技术指标Tab.1 Main technical specifications
1.2 仿形原理
仿形喷雾是根据果树冠层结构形状,实时调节喷雾头的空间位置和姿态,使得雾流最大范围流向树冠,从而实现单次农药喷施过程中冠层的全覆盖。
单侧喷雾仿形机构如图1扬示,主要包括执行电机、丝杆螺母机构、仿形推杆机构、直线轴承、圆盘式雾化盘、连杆、底座和支承架。仿形架整体可通过电机驱动丝杆螺母机构实现大幅度横向平移和垂直升降,通过控制各仿形推杆的伸长量来调整机构形状及雾化盘位置。作业过程中,首先根据实际果树冠幅尺寸,调节横向和升降丝杆螺母机构,使得喷雾头处于合适位置,再精确调整各仿形推杆伸缩量,保证理想喷雾距离。丝杆螺母平移机构结合多段仿形推杆可以实现大幅度、多角度调节各雾化盘空间位置,达到柔性仿形、精准喷施目的。
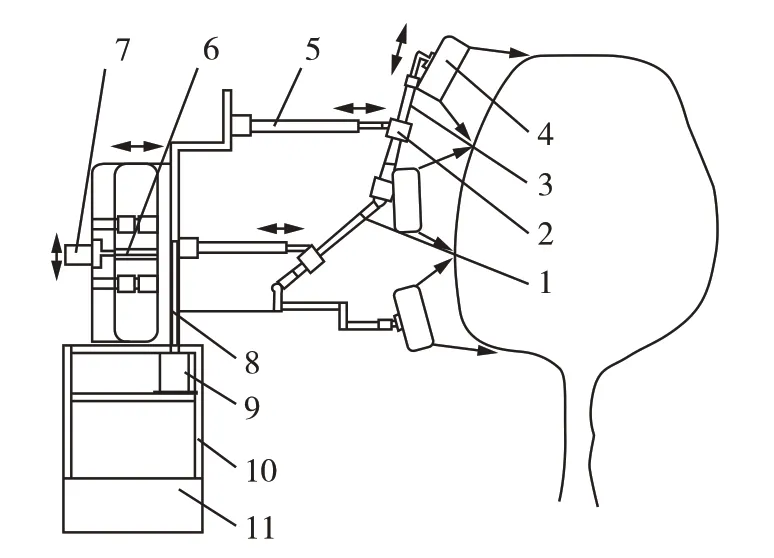
图1 机构仿形示意图Fig.1 Mechanism profiling diagram
2 机构设计
2.1 仿形机构总体设计
仿形机构是喷雾机实施作业的核心部件,应当综合考虑树冠仿形效果、系统刚性及工作稳定性。
机构总体设计如图2扬示,总体结构为多自由度对称式二级摇臂机构,并固定安装于牵引式拖车上。

图2 仿形机构样机模型Fig.2 Prototype model of profiling mechanism
机构左右两侧结构上完全对称,仿形机构单侧具有多个自由度,将每侧3个雾化盘安装于机构关节处,通过驱动电机或者改变仿形推杆的伸长量以此调节雾化盘与树冠之间的距离和角度,从而获得最佳喷雾参数。
2.2 仿形作业的具体实施
如图1扬示,水平安装的丝杆螺母机构在步进电机驱动下,可以实现整个右侧机构水平方向大幅度直线平移;竖直安装的丝杆螺母机构在步进电机驱动下,可以实现整个右侧机构上下大幅度升降;2个水平安装的仿形推杆,伸长量的组合变化能够调节圆盘式雾化器的位置和姿态;高位仿形推杆的伸缩变化可以调整顶部圆盘式雾化器的位置;直线轴承能够在连杆和仿形推杆外壁滑动。机构左右两侧结构完全对称,原理相同。
总之,通过驱动水平和竖直方向的电机组合,结合各个仿形推杆伸缩,即调节每个雾化盘空间位姿,实现仿形作业。
2.3 仿形推杆结构设计
仿形推杆是将电机的旋转运动转化为推杆直线往复运动的装置,主要包括端部法兰、推杆、推杆端盖、直线轴承、轴承端盖、轴承座、圆锥滚子轴承、平键蜗轮等,如图3扬示。
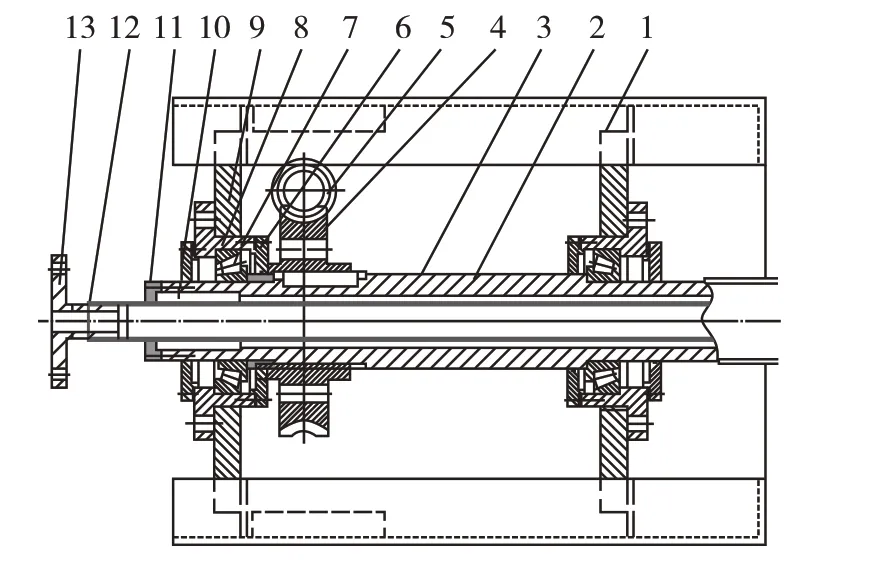
图3 仿形推杆结构图Fig.3 Structure diagram of profiling push rod
丝杆在步进电机驱动下同步转动,同时螺母在导轨内往复直线运动。仿形推杆的最大行程为800 mm,机构最大的轴向推力为1 500 N,其最大的空载转速为25 mm/s。
2.4 推杆机构调节设计
仿形推杆内步进电机与推杆同轴安装,推杆端部与中空钢管型材采用法兰联接,如图4扬示。仿形机构通过仿形推杆的伸缩调节喷雾头位置,推杆与连杆外壁之间的联接要求稳定,推杆伸出端既需要转动副又需要移动副。
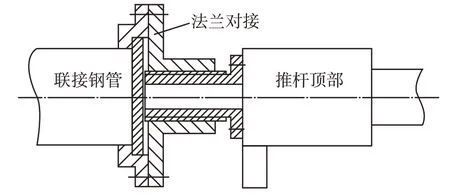
图4 推杆与型材联接Fig.4 Connection of push rod and section bar
为了减少摩擦力,使得推杆与连杆外壁能够光滑移动,采用带法兰的直线轴承与套筒安装的结构[10],如图5扬示。
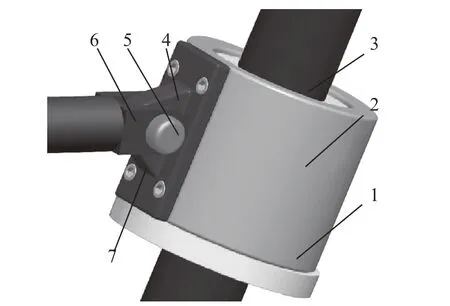
图5 直线轴承联接Fig.5 Connection of linear bearing
2.5 转向机构设计
仿形机构的转向装置选用蜗轮蜗杆传动机构来实现,如图3扬示,其设计参数与选型应根据执行装置的运行速度确定,旋转角速度、平移速度与蜗轮蜗杆参数[11]如式(1)~式(4)。

式中:n1——蜗杆即步进电机转速,r/min;
z1——蜗杆头数;
z2——蜗轮齿数;
n2——丝杆转速,r/min;
δ——丝杆螺距,m;
v2——平移速度,m/s;
d1——蜗杆分度圆直径,m;
d2——蜗轮分度圆直径,m;
m——模数,m=4;
q——直径系数,q=10。
喷雾机构在停止工作时,旋转装置向内旋转90°,完成该动作额定时间为15 s,即蜗轮转速为1 r/min。为了实现自锁功能,选取分度圆导程角为5°,蜗杆头数z1=1,因此蜗轮齿数z2=40,蜗杆分度圆直径d1=40 mm;蜗轮分度圆直径d2=160 mm。
2.6 仿形推杆电机选型
电机的计算转矩Teq取最大等效负载转矩Teq1和快速启动时空载转矩Teq2二者中的较大值[12]。
式中:Tt——最大工作负载转矩,N·m;
Tf——电机轴摩擦转矩,N·m;
T0——附加摩擦转矩,N·m;
Ff——进给方向最大载荷,Ff=370 N;
Fc——垂直方向载荷,Fc=370 N;
G——运动部件的总重,G=300 N;
Ph——丝杆导程,Ph=5 mm;
FYJ——滚珠丝杆的预紧力,FYJ=123 N;
μ——导轨的摩擦因数,μ=0.18;
i——传动比,i=1;
η——传动链总效率,η=0.7;
η0——丝杠未预紧传动效率,η0=0.9;
Jeq——总转动惯量,Jeq=0.098 kg·cm2;
nm——步进电机转速,nm=60 r/min;
ta——步进电机加速扬用时间,ta=1 s;
Tamax——最大加速转矩,N·m。
扬以计算转矩Teq为0.782 N·m,取安全系数K为2.5,KTeq为1.7。该系统选用两相步进电机,型号为90BF003。机构的推杆电机供电电压为24 V,工作电流为5 A,工作时最大静转矩为1.96 N·m,其转动惯量为0.6 kg·cm2。
3 仿形机构运动学分析
3.1 机构数学模型
为了研究柔性仿形喷雾机构运动模型,优化喷雾点的运动学和动力学特性,从而获得最佳的作业区域,将柔性仿形机构抽象为计算模型[13],具体模型如图6扬示。
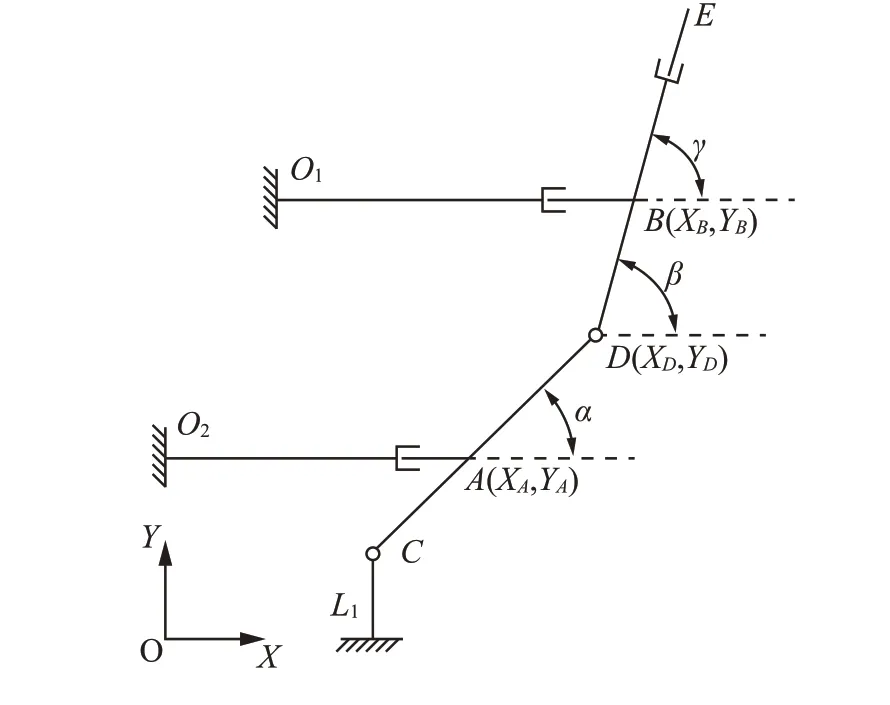
图6 机构数学模型Fig.6 Mathematical model of mechanism
3.2 喷雾点运动学方程
图7为连杆机构关节坐标系模型,其单侧3个雾化器(喷雾点)安装位置分别为点C、点D、点E,同时,建立坐标系和各个点的坐标位置,其中,坐标系中数值单位为mm。

图7 连杆机构关节坐标系Fig.7 Joint coordinate system of linkage mechanism
其中O0(650,250),连杆的长度ai、连杆扭角αi、关节变量角θi和偏置量di,关节连杆变换参数如表2扬示[14]。
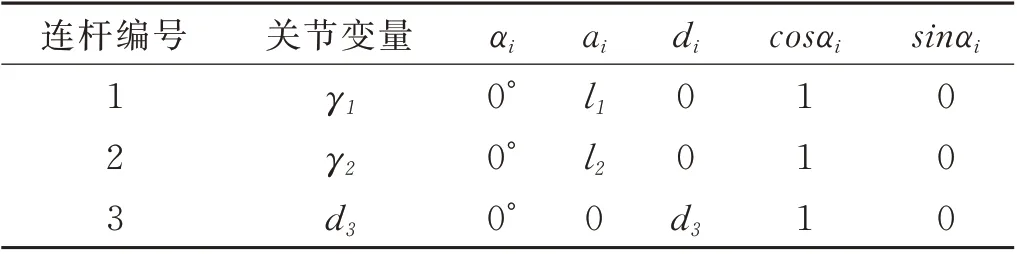
表2 连杆变换参数Tab.2 Parameters of connecting rod transformation
坐标系{i}到{i-1}的变换矩阵

将表2变换参数带入式(11),得
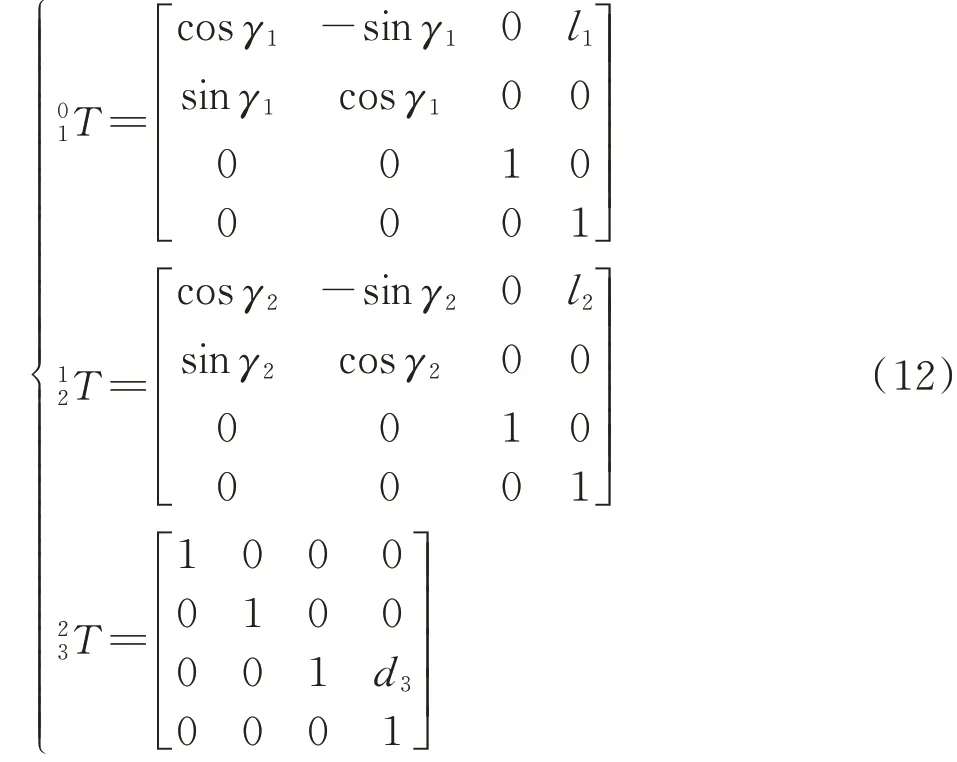
D点的运动学方程为:SD=,即
喷雾点E的运动学方程
SE=,即

其中,d3为仿形推杆DE的伸长量,0 mm≤d3≤800 mm,32.3°≤γ1≤69.8°,10.9°≤γ2≤49.3°。
3.3 仿形机构参数优化
仿形机构参数优化的目标是在现有的约束条件下,调整两个水平放置的仿形推杆初始安装位置,使得喷雾点D、E具有较大的工作空间[15-16],因此需综合考虑工作空间和受力,寻求图6中O1(XO1、YO1)的最佳安装位置YO1的值。
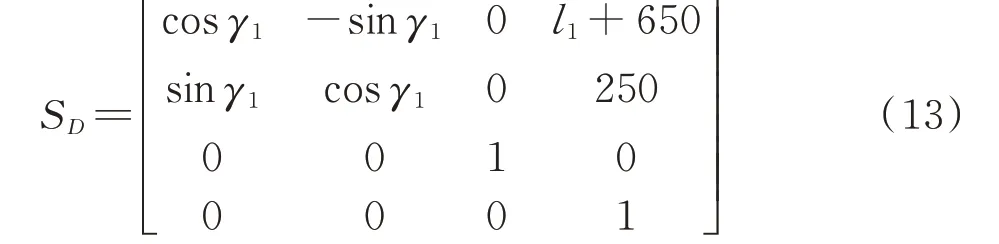
在ADAMS中采用关键点参数化的方法构建机构模型和目标函数[17],以此进行O1点的位置优化。在保证机构能够实现整周转动前提下,测得YO1的范围为225 mm≤YO1≤275 mm。设YO1的初始值为225 mm,最大值为275 mm,进行间距为5 mm的仿真试验,其数值如表3扬示。其中,DisXmax、DisXmin分别为E点横坐标的最大值、最小值,DisYmax、DisYmin、分别为E点纵坐标的最大值、最小值,ΔDis_X、ΔDis_Y分别为E点水平、竖直方向行程,单位为mm。FMmax、FMmin为D点受合外力的最大值、最小值,单位为N。
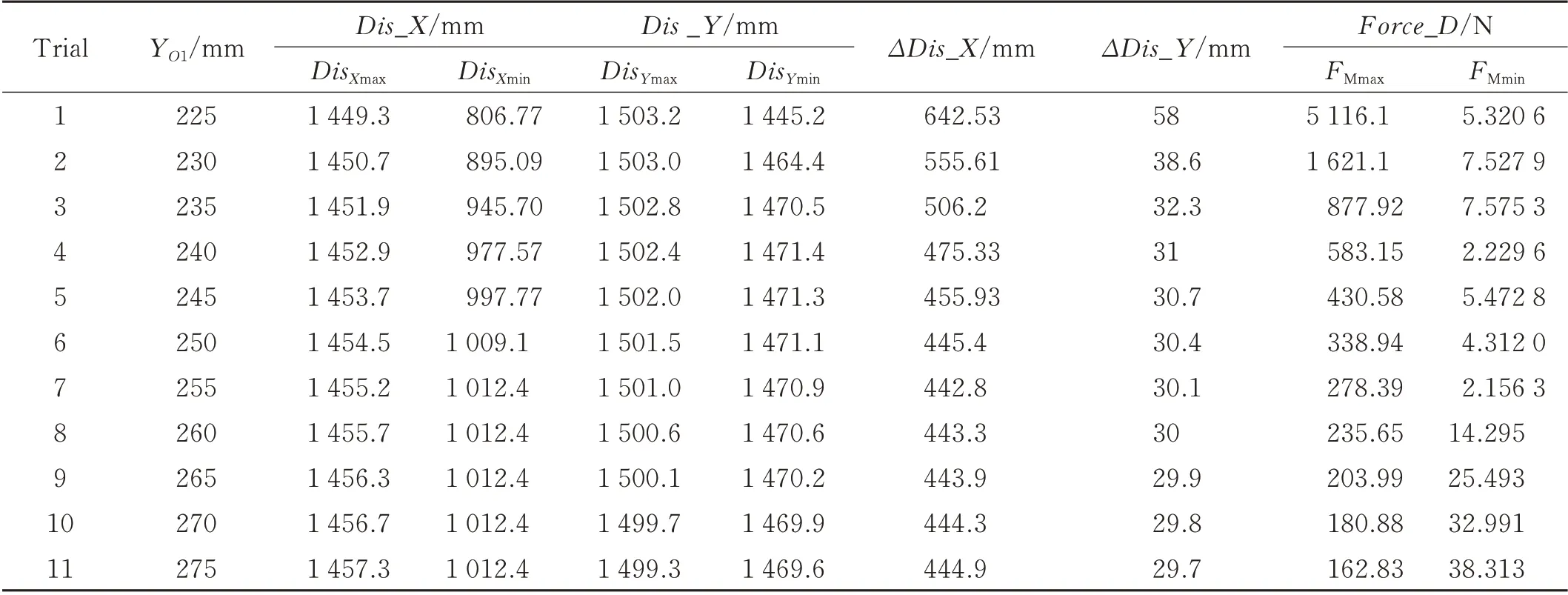
表3 推杆O1B的位置对点E位移及点D处受力影响Tab.3 Influence of the push rod O1B position on the displacement at point E and the force at point D
研究表3可以发现,随着YO1取值增加,点D的受力大大减小,YO1取值为245 mm时,Force_D迅速突变为430.58 N,YO1继续增加后一直处于平稳数值,Force_D缓慢变化。为了尽量增加工作范围,选择YO1的数值为250 mm作为仿形推杆的竖直安装位置。喷雾点E的最大水平坐标为1 454.5 mm,最大竖直坐标为1 501.5 mm,横向和纵向调节量分别为445.4 mm和30.4 mm,点D受到最大力为338.94 N。横向和纵向可调节最大值分别为695.4 mm、680.4 mm,喷雾机单侧最大作业高度和宽度分别为2 951.5 mm、1 704.5 mm(水平250 mm和竖直650 mm叠加后),如表4扬示。可以看出,调节范围可以满足前文扬述设计要求,且机构受力平稳,工作可靠。

表4 优化后变量最优解Tab.4 Optimal value of variables after optimization
4 性能试验分析
为了分析仿形机构喷雾效果,现场测试了样机的性能参数[18],包括各关节的工作行程、响应时间等,并进行冠层覆盖率试验。
4.1 机构响应特性测试
仿形机构整体平移幅度、速度和稳定性等是衡量喷雾机重要参数,而各个关节伸缩运动性能则是能否实现仿形的关键[19]。
试验过程中,分别测量整体仿形架横向、纵向平移至最大位移处的时间,再测得各关节仿形推杆完全展开的时间,反复3次,取平均值如表5扬示。执行过程中,机构运行平稳,无明显振动或电机堵转,满足预计仿形功能。
表5 运动性能参数Tab.5 Kinematic performance parameters
4.2 仿形喷雾沉积效果测试
4.2.1 试验条件
为了验证仿形喷雾效果,比较固定喷雾和仿形喷雾作业效果(图8),对比试验于浙江省台州试验示范基地进行,试验过程中环境温度14℃~21℃,空气湿度为66%,阵风速度0.8~2 m/s。试验对象为两排直线排布的印度茉莉,树高平均2.2 m,行距4 m,株距2 m,叶面积平均32 cm2。
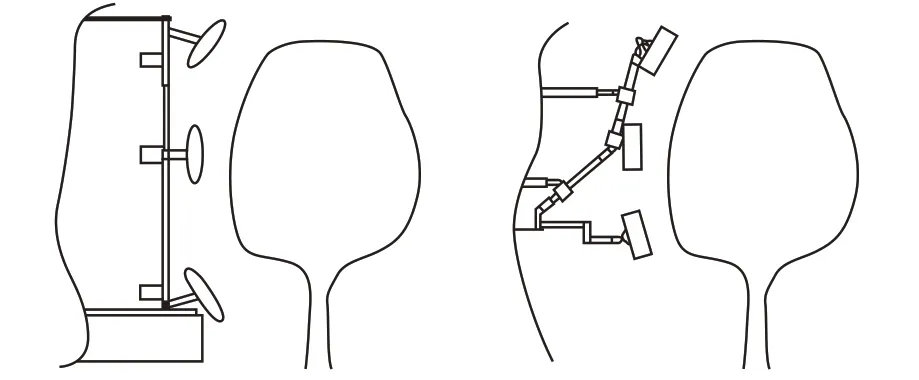
图8 固定位置喷雾与仿形喷雾Fig.8 Fixed position spray and profiling spray
喷雾机由东风500拖机牵引,以0.82 m/s匀速行驶,风机转速1 340 r/min,喷雾压力0.5 MPa,每个雾化器装有8个喷雾头,每侧3个雾化器,计24个喷雾头进行现场试验。
4.2.2 试验方法
选定位于每行中间的2棵树作为雾滴采样对象,设定如图9扬示的采样点,各点高度距离地面分别为0.5 m、0.85 m、1.2 m、1.5 m和1.8 m,左右分居树干两侧0.3 m。采样点正反面固定水敏试纸,试验结束后,将水敏试纸风干编号,测得覆盖率(3次平均值)。
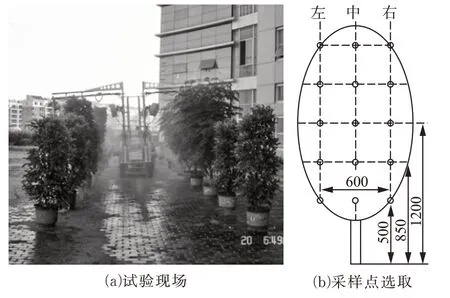
图9 试验方法及过程Fig.9 Test method and process
4.2.3 试验结果
采用Depositscan软件读取水敏试纸中雾滴覆盖率。树冠分割为5行3列共15个测量点,每个点正反面分别测量,开展固定喷雾与仿形喷雾对比试验,结果如表6。覆盖率平均值从左向右呈减小趋势,纵向自下而上呈上升趋势;固定喷雾整体雾滴覆盖率平均值为29.97%,变异系数平均值为39.05%,而仿形喷雾覆盖率平均值为43.85%,变异系数平均值为26.63%,表明相同工况下,仿形喷雾的雾滴覆盖率高于固定位置喷雾,雾滴分布更为均匀有效。
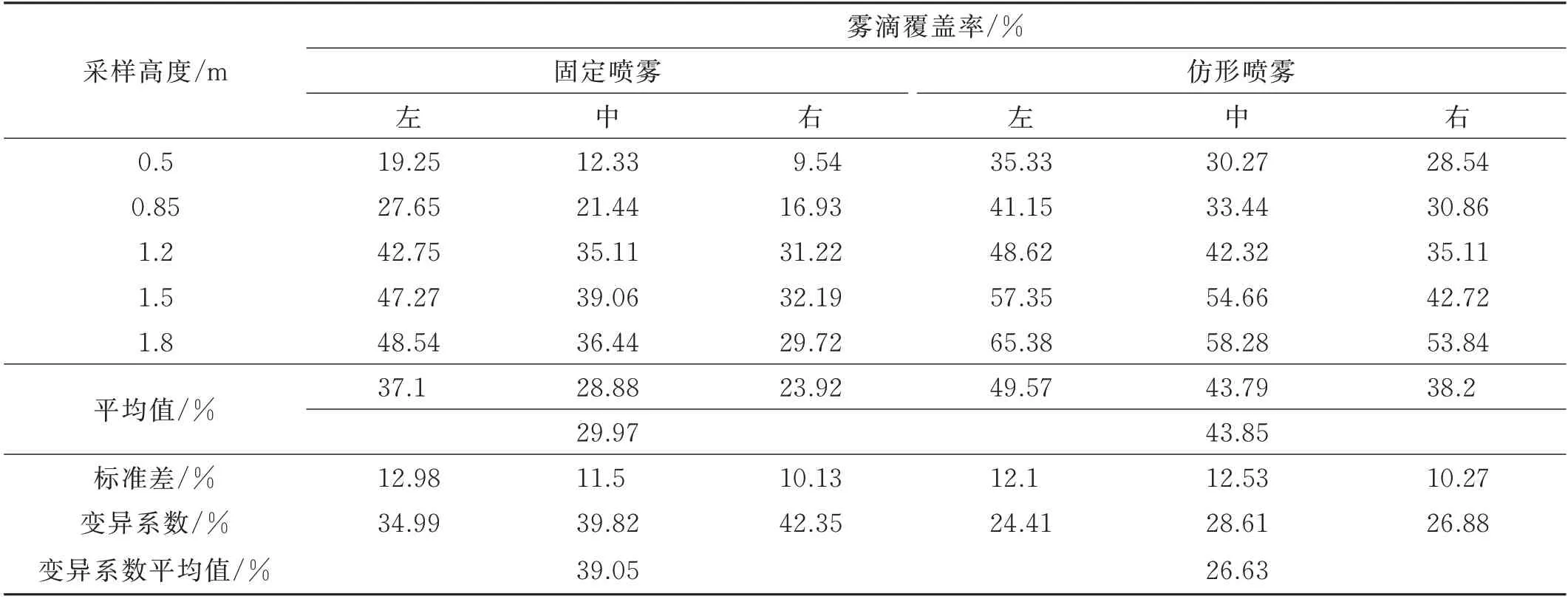
表6 固定喷雾与仿形喷雾冠层雾滴覆盖率Tab.6 Spray coverage of fixed spray and profiling spray
5 结论
扬设计的柔性仿形喷雾机构,通过理论分析、运动学仿真和试验,得到主要结论如下。
1)基于果园施药仿形低量喷雾思想,设计一种三自由度对称式两级摇臂施药机构,构建其数学模型,优化结构参数,并推导出各喷雾点运动学方程。通过运动仿真和现场试验验证,柔性仿形机构可以满足仿形喷雾的技术要求。其单侧最大仿形高度和宽度分别为2 951.5 mm、1 704.5 mm,横向和纵向可调节最大值分别为695.4 mm、680.4 mm,运行过程中铰接点处受力最大为338.94 N。
2)机构的响应特性结果显示,柔性仿形机构运行稳定,水平伸缩全程时间为12.5 s,升降全程时间为36.2 s,单一推杆全程平均时间约19.2 s。
3)喷雾沉积特性试验结果表明,仿形喷雾覆盖率达43.85%,变异系数平均26.63%,优于固定喷雾整体雾滴覆盖率平均值为29.97%,变异系数平均39.05%。
