压阻式加速度传感器温度补偿电路的设计
2022-04-13杨春迪亢玮冬
杨 文,靳 鸿,杨春迪,张 晶,亢玮冬
(1.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051;2.山西财贸职业技术学院,山西 太原 030031;3.晋西工业集团有限责任公司,山西 太原 030027)
0 引言
随着现代科技的不断发展,传感器技术在航空航天、军工、水电、交通、地震测量以及医学等领域中有着广泛的应用,是各行各业必不可少的重要成分。传感器具有体积小、重量轻、成本低、性能好、易于大批量生产等优势。温度是影响传感器正常工作的一个重要因素,会使传感器发生温漂现象,极大地降低传感器测量结果的精确性和可靠性。
到目前为止,国内外机构对压阻式压力传感器的温漂特性以及温度补偿做过大量研究,研究成果已应用于生产实践中。例如美国传感器公司kulitey 已研制出一套补偿系统,但是需要与专用计算机结合使用,导致成本很高。我国沈阳仪器仪表工艺研究所研制的硅压力传感器的温度自补偿系统精确度、效率仍有待提高。由于国内外对压阻式加速度传感器尤其是压阻式三轴加速度传感器研究较少,因此本文分别对压阻式单、三轴加速度传感器的温漂特性进行实验研究,最后设计一种温度补偿电路来抑制温漂。
1 压阻式加速度传感器温漂产生的原因
压阻式加速度传感器的本质是一种微加工技术制备的单晶硅芯片。单轴加速度传感器的内部为4 个敏感电阻构成的惠斯通电桥可动悬臂梁;三轴加速度传感器内部在x
,y
,z
轴方向上分别有4 个敏感电阻构成的惠斯通电桥可动悬臂梁。惠斯通电桥电路见图1,4 个敏感电阻分别为R
,R
,R
,R
。
图1 惠斯通电桥电路图
对惠斯通电桥电路进行恒压源E
激励。1)温度为t
,加速度为0 时:
t
+Δt
,加速度为0 时:
t
,加速度为a
时: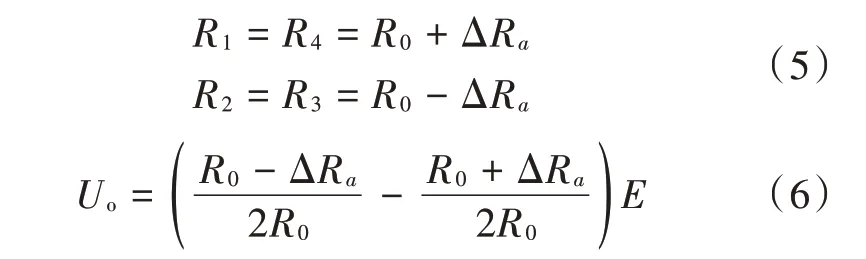
t
+Δt
,加速度为a
时: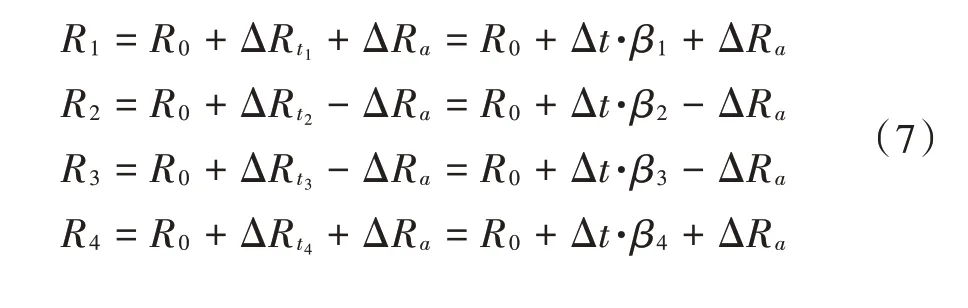

U
为输出电压;β
为电阻温度系数;ΔR
为输入加速度a
引起电阻的变化,其中一个对角R
,R
电阻值变化为ΔR
,另一个对角R
,R
电阻值变化为-ΔR
;ΔR
为温度变化Δt
时引起的电阻阻值变化,表示为:
β
存在差异,同一电阻在不同温度下电阻温度系数β
也会发生变化。4 个敏感电阻由于温度系数不同,所以当温度变化时,4 个电阻随温度的改变量不同,使得4 个电阻的阻值产生差异,进而导致惠斯通电桥失去平衡产生输出。2 压阻式加速度传感器的温漂特性
2.1 最小二乘曲线拟合法
最小二乘曲线拟合法是以数据偏差平方和最小的原则来进行曲线拟合的一种方法。实验时由于数据量大而且是通过测量得到的,所以数据本身就存在一定的误差。最小二乘曲线拟合表达式不要求通过所有数据,只要求尽可能通过它们附近,这样就可抵消原数据中的测量误差。
假设实验测得的数据为(x
,y
)(i
=1,2,…,n
),拟合曲线为p
(x
)。p
(x
)由m
个线性无关的基函数p
(x
),p
(x
),p
(x
),…,p
(x
)线性组成,表示为:
x
,x
,…,x
,则:
n
个数据代入到多项式p
(x
),得到含m
+1个未知数a
(j
=0,1,2,…,m
)n
个方程的矛盾方程组,如下所示: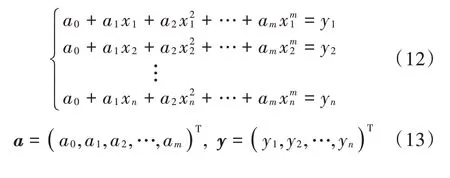
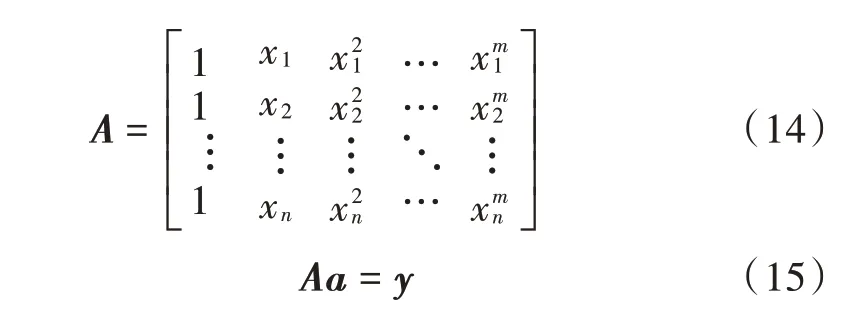
根据最小二乘曲线拟合的定义,即以数据偏差平方和最小的原则选择拟合曲线。
偏差平方和表示如下:

取其极小值求得矛盾方程组最优近似解,它对应的正规方程如下:

a
,a
,a
,…,a
。2.2 压阻式加速度传感器的温漂特性
为了探究压阻式加速度传感器的温漂特性,利用HTH605 高低温交变湿热试验箱分别对压阻式单、三轴加速度传感器进行实验,测量传感器的零位输出电压,实验的温度范围为-25~50 ℃,每2.5 ℃进行一次数据测量。为了排除电源供电不稳对实验的影响,本实验采用3.7 V 锂电池接稳压芯片对压阻式加速度传感器进行3.32 V 稳定供电。根据测量数据绘制的曲线如图2~图6 所示。

图6 三轴加速度传感器温漂曲线图
2.2.1 温度对压阻式单轴加速度传感器的影响
由图2 可以看出,随着温度的升高,压阻式单轴加速度传感器的输出呈下降趋势,-25~-7.5 ℃和0~50 ℃呈线性下降,-7.5~0 ℃下降较为缓慢。

图2 单轴加速度传感器温漂曲线图
对三个温度阶段分别进行最小二乘曲线拟合,得到的拟合曲线见图3~图5,并求出拟合表达式和可决系数R
。
图3 单轴加速度传感器-25~-7.5 ℃实测曲线、拟合曲线图
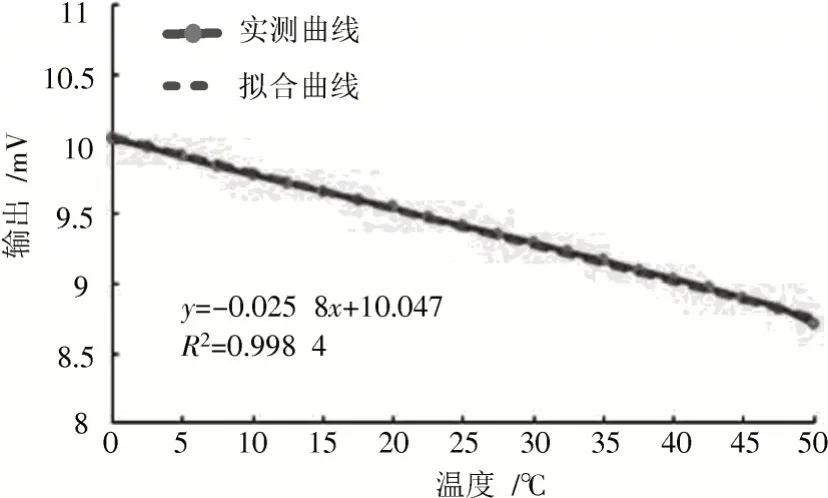
图5 单轴加速度传感器0~50 ℃实测曲线、拟合曲线图
由拟合表达式可知,随着温度的升高,-25~-7.5 ℃和0~50 ℃传感器输出呈线性下降,且-25~-7.5 ℃比0~50 ℃下降得更快。-7.5~0 ℃输出下降幅度缓慢且呈二次线性。三段图像的可决系数R
都接近1,拟合曲线与实测曲线拟合程度很高。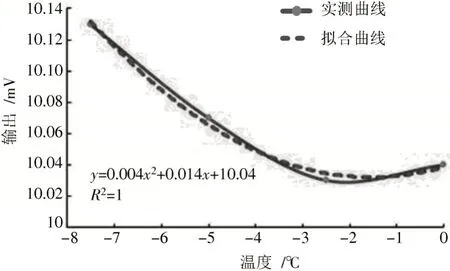
图4 单轴加速度传感器-7.5~0 ℃实测曲线、拟合曲线图
2.2.2 温度对压阻式三轴加速度传感器的影响
由图6 可以看出:随着温度的升高,压阻式三轴加速度传感器x
,y
轴的输出基本稳定;z
轴的输出受温度影响远远大于x
,y
轴,z
轴随着温度的升高-25~-7.5 ℃和0~50 ℃输出呈线性下降,-7.5~0 ℃下降较为缓慢。对z
轴三个温度阶段分别进行最小二乘曲线拟合,得到拟合曲线见图7~图9,并求出拟合表达式和可决系数R
。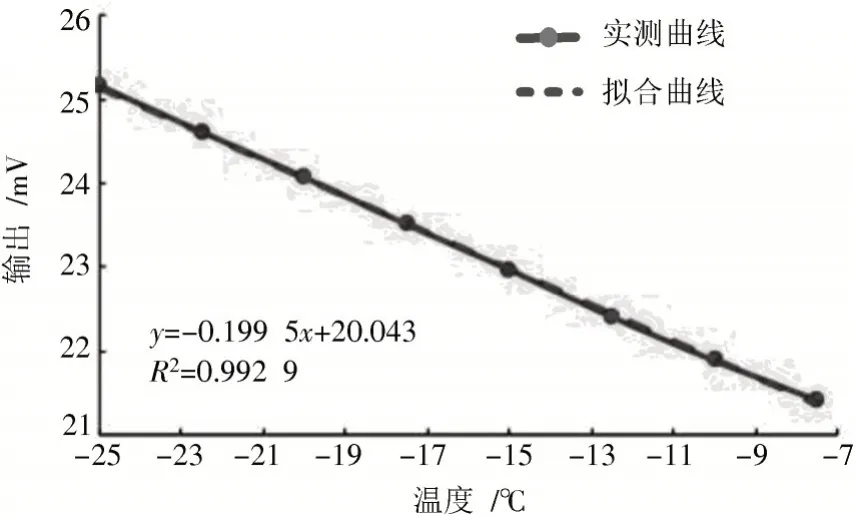
图7 三轴加速度传感器z 轴-25~-7.5 ℃实测曲线、拟合曲线图

图8 三轴加速度传感器z 轴-7.5~0 ℃实测曲线、拟合曲线图
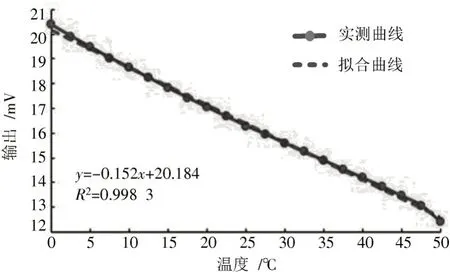
图9 三轴加速度传感器z 轴0~50 ℃实测曲线、拟合曲线图
由拟合表达式可知,随着温度的升高,-25~-7.5 ℃和0~50 ℃传感器输出呈线性下降,且-25~-7.5 ℃比0~50 ℃下降得更快。-7.5~0 ℃输出下降幅度缓慢且呈二次线性。三段图像的可决系数R
都接近1,拟合曲线与实测曲线拟合程度很高。综上所述得出:
1)压阻式单轴加速度传感器受温度影响较小,输出的总体趋势随着温度的升高而缓慢下降。压阻式三轴加速度传感器x
,y
轴输出受温度影响很小;z
轴输出受温度影响很大,输出的总体趋势随着温度的升高而显著下降。2)随着温度的升高,压阻式单轴加速度传感器和压阻式三轴加速度传感器的z
轴在-7.5~0 ℃输出下降幅度缓慢且都呈二次线性,在-25~-7.5 ℃和0~50 ℃输出呈线性下降且-25~-7.5 ℃比0~50 ℃下降得更快。3)单、三轴加速度传感器的零位输出电压如表1、表2 所示。

表1 单轴加速度传感器的零位输出电压
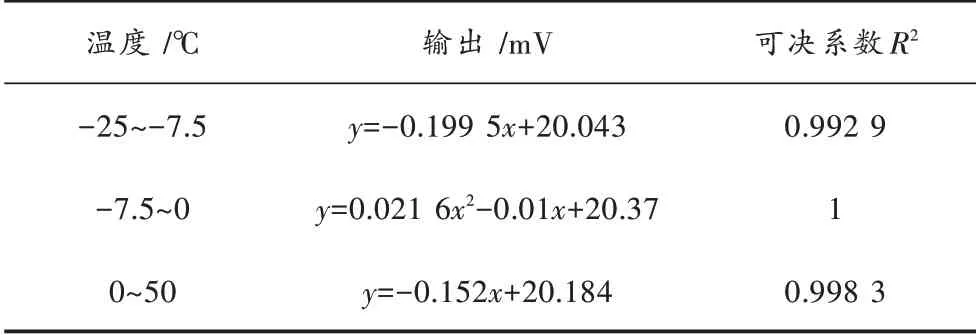
表2 三轴加速度传感器(z 轴)的零位输出电压
3 压阻式加速度传感器的温度补偿
为了减小温度给传感器测量系统带来的误差,使系统更好地工作,本文从传感器及其外围电路两方面来进行补偿。
3.1 传感器温度补偿
3.1.1 补偿电路设计
以第2 节得出的压阻式加速度传感器零位输出与温度间的变化关系式(见表1、表2)为依据,设计以FPGA Cyclone IV 为主控芯片的温度补偿电路。传感器温度补偿电路结构如图10 所示。
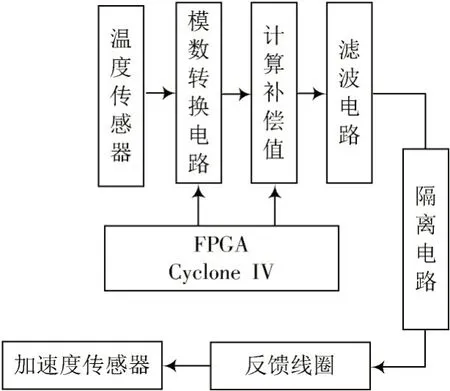
图10 传感器温度补偿电路结构框图
温度传感器TMP36 置于试验环境下,采集温度信号并将其转换为电压信号,模数转换电路将电压信号转换为数字信号,系统程序对数据进行处理并计算出补偿值;然后由滤波电路将上一级发送过来的PWM 信号转换成模拟信号;最后经反馈线圈对加速度传感器进行温度补偿。
传感器温度补偿电路采用3.3 V 电源供电。本文使用北京时阳电子科技有限公司的TMP36 温度传感器,它提供与摄氏温度成线性比例关系的电压输出10 mV/℃,温度测量范围-40~125 ℃。模数转换电路采用AD 公司生产的12 位并行输出模数转换器AD7492。FPGA Cyclone IV 是Altera 公司的一款芯片,即现场可编程门阵列,是专用集成电路领域中的一种半定制电路。
3.1.2 滤波电路设计
滤波电路有两个作用,一是对PWM 信号进行滤波,二是将上一级产生的占空比可调节的PWM 信号转换成模拟信号,滤波电路如图11 所示。

图11 滤波电路图
滤波电路中R
=R
=30 kΩ,C
=C
=1 μF,截止频率大约为5 Hz,经滤波后的模拟电压信号频率较低,可认为是直流信号,极大地降低了杂波干扰。滤波电路将上一级产生的占空比可调节的PWM 信号转换成模拟信号,PWM 信号电压为U
,周期为T
,经滤波后的模拟信号为U
,一个周期内高电平时间为t
,可得出:
3.1.3 隔离电路设计
压阻式加速度传感器测量系统处于稳定状态,如果外加补偿电路,补偿电路中的反馈元器件会使系统阻抗发生变化,进而影响系统的稳定状态,所以必需设计隔离电路。电压跟随器即输出电压跟随输入电压,它可以看作一个高输入阻抗、低输出阻抗的器件,对前后电路有隔离作用。所以,本文在反馈线圈和补偿电路之间接入电压跟随进行隔离操作。隔离电路结构见图12。
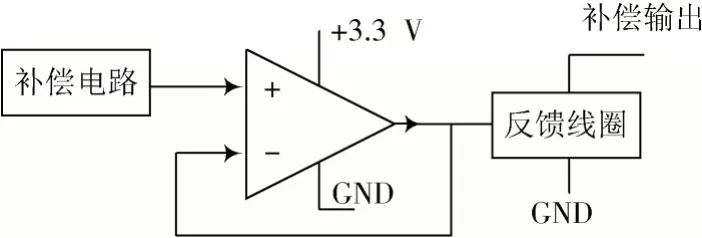
图12 隔离电路结构框图
3.1.4 补偿程序设计
程序采用VHDL 语言进行编写。程序分为五个部分,分别为上下电复位、计数器延时、A/D 转换、条件判断并计算补偿值、发送PWM 信号。传感器温度补偿程序逻辑如图13 所示。
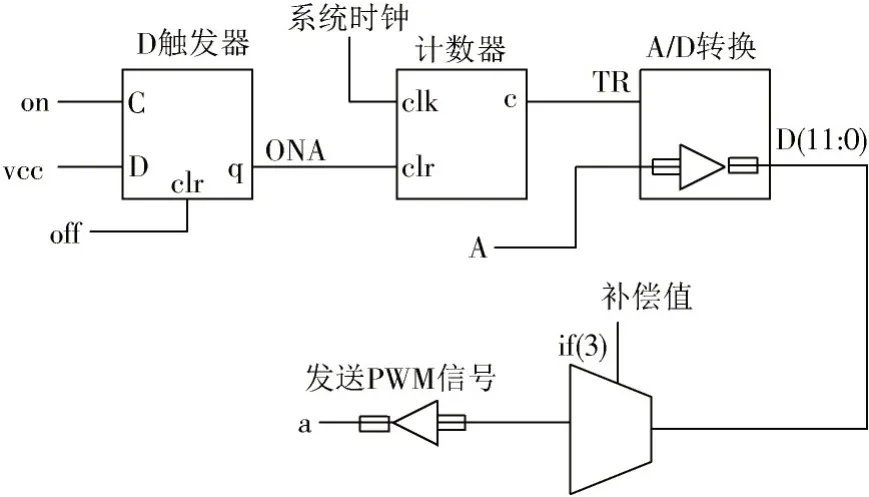
图13 传感器温度补偿程序逻辑图
1)系统上下电采用带异步清除功能的D 触发器,初始ONA=0;当off=0,外部输入信号on 为上升沿时ONA=D=1 并保持。此后ONA 不再随on 变化,系统上电。当off=1 时ONA=0 系统下电。
2)由于温度是不断动态变化的,需要经过一段时间,温度传感器采集到的温度信号才能稳定下来,所以设计了一个计数器,如下:

t
后TR=1 系统开始将温度传感器输出的模拟信号进行A/D 转换为12 位数字信号。4)对A/D 转换后的12 位数字信号进行三个if 条件判断(由表1、表2 可知温度为-25~-7.5 ℃,-7.5~0 ℃,0~50 ℃三个阶段的传感器输出与温度间的关系式不同)计算出对应温度下补偿值,补偿值即为该温度下传感器负的零位输出值。
5)系统计算出补偿值后,向滤波电路发送PWM 信号,进行下一步的滤波处理。
传感器温度补偿程序流程如图14 所示。

图14 传感器温度补偿程序流程
3.2 传感器外围电路温度补偿
采用传感器外接差分运算放大电路的方法对传感器外围电路进行温度补偿。差分运算放大电路内部是两个结构、参数、特性完全相同且左右对称的管子,当差分运算放大电路输入共模信号时,两只管子的输入相等,输出也相等。差分运算放大电路的输出为两个管子输出的差值,所以差分运算放大电路的输出为0,它对共模信号有很强的抑制作用。温度因素可以等效为共模信号,这样差分运算放大电路就可以很好地抑制温漂。
传感器外围电路温度补偿由电源、稳压芯片(1)、传感器及温度补偿电路(2)、差分运算放大电路(3)、电压跟随器(4)、滤波电路(5)组成,见图15。由电源经过稳压芯片为传感器及温度补偿电路供电,电路的输出信号作为差分运算放大电路的输入信号VIN+、VIN-。同时电源经过稳压芯片输入到电压跟随器,电压跟随器将产生的基准电压REF 送入到差分运算放大电路中。差分运算放大电路的输出T 经过滤波电路,滤掉直流电压中的脉动成分后,得到最终的电压OUT。

图15 外围电路温度补偿结构框图
3.3 实验验证
利用HTH605 高低温交变湿热试验箱分别对压阻式单、三轴(z
轴)加速度传感器进行实验,探究补偿前后传感器零位输出电压随温度的变化情况。实验的温度范围为-20~40 ℃。为了排除电源供电不稳对实验的影响,本实验采用3.7 V 锂电池接稳压芯片对补偿电路进行3.32 V 稳定供电;实验中差分运算放大电路的放大倍数为40 倍,基准电压REF 为0.767 V。实验结果如表3、表4、图16、图17 所示。
表3 单轴加速度传感器零位输出电压

表4 三轴加速度传感器(z 轴)零位输出电压
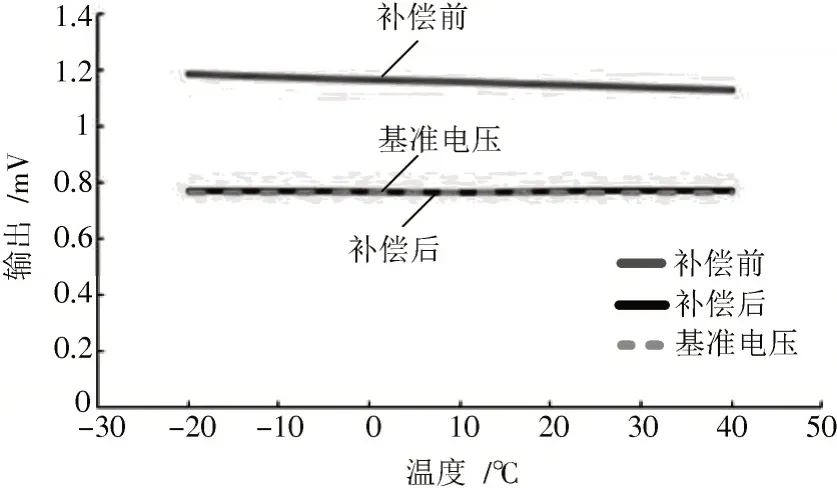
图16 单轴加速度传感器零位输出电压
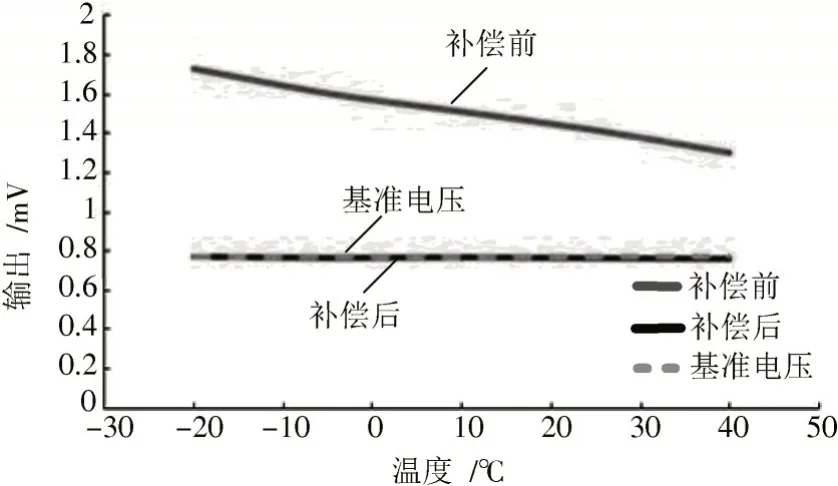
图17 三轴加速度传感器(z轴)零位输出电压
由表3、表4可知:单轴加速度传感器零位输出电压补偿前最大差值为0.059 V,补偿后最大差值为0.007 V;三轴加速度传感器零位输出电压补偿前最大差值为0.425 V,补偿后最大差值为0.012 V。由图16、图17 可知,加速度传感器零位输出电压补偿前曲线与基准电压曲线相差很大,补偿后曲线与基准电压曲线很接近。
实验证明这种温度补偿方法效果很好,对传感器的温漂具有很强的抑制作用,可提高传感器测试系统的测量精度,补偿电路可重复使用。
4 结 语
国内外对压阻式加速度传感器尤其是压阻式三轴加速度传感器研究较少,笔者从原理上解释压阻式加速度传感器温漂产生的原因并对其温漂特性进行研究。在此基础上设计一种以FPGA 为主控芯片的传感器温度补偿电路,经过实验验证,传感器测量系统的温漂得到了极大的改善。补偿方法操作方便、可重复使用、精度高且满足外场试验的需要。
