基于时间最优的工业机器人关节空间轨迹规划
2022-04-12张华文刘子亮
张华文 ,刘子亮
(1.河南省工业机器人应用工程技术研究中心; 2.河南工业职业技术学院, 河南 南阳 473000; 3.天地上海采掘装备科技有限公司,上海 201401)
0 引言
工业机器人运行时,为使关节运动平滑,需要对机器人进行关节空间的轨迹规划。合理的运动轨迹能够使运行平稳,有效缩短运行时间,减少能量损耗和关节磨损,提高经济效益[1]。文献[2]基于限制加速度对时间导数的运动学轨迹平滑性提出一种多变量约束时间优化方法,降低了机器人轨迹跟踪误差,减少了共振频率,但是运行过程中加速度可能会产生突变[2]。文献[3]和文献[4]基于遗传算法和高次多项式来实现时间最优的轨迹规划,起始和停止运动参数可控,提高了轨迹跟踪精度,但是算法较为复杂,增加系统的运算负担[3-4]。文献[5]采用非均匀B样条曲线与高次多项式混、合插值的优化方法,在不增加控制系统计算负担的前提下,保证机器人关节运动参数连续无突变,但没有考虑多关节运行同步的问题[5]。
综合以上文献工作的优缺点,该文以六自由度串联机器人为研究对象,提出一种基于二次抛物线加速度连续的关节空间时间最优轨迹规划算法,引入速度同步系数和加速度同步系数两个参数,用来解决各关节运行同步的问题。该算法数学表达式简单,易于编程实现,保证了加速度、速度和位移的连续,实现各关节同步运行和时间最优,有效提高机器人运行效率和平稳性。
1 轨迹规划算法理论分析

在qi和qf之间的轨迹规划可以用公式(1)表示:
q(t)=qi+r(t)D0≤t≤tf
(1)
其中:D=qf-qi。规划算法的目标是求出r(t)的表达式。
1.1 匀加速-匀减速运动模型分析
匀加速-匀减速运动分为两个阶段:前一阶段为匀加速运动,后一阶段为匀减速运动。起始速度和终止速度都为0[8]。设总运动时间为tf,,则加速段和减速段时间均为tf/2,关节j的位移关于时间的表达式如公式(2)所示:
(2)
根据公式(2),求得最大速度和最大加速度为:
(3)
最小运动时间为:
(4)
1.2 梯形速度运动模型分析
梯形速度运动分为三个阶段:第一阶段为匀加速运动,第二阶段为匀速运动,第三阶段为匀减速运动。梯形速度运动能够保证运行时间的最优[9-11]。根据公式(3)可知,如果运动距离满足公式(5),则该运动可以用梯形速度来描述。
(5)
梯形速度运动的位移表达式如公式(6)所示,其中τj表示加速段时间。
(6)
对速度进行时间的积分,得到梯形的面积,即为运动的距离,如公式(7)所示:
(7)
求得关节j最小运行时间为:
tfj=kvj/kaj+|Dj|/kvj=τj+|Dj|/kvj
(8)
所有关节的运动必须保证同步,即在相同的时间内完成各自的运动。为了达到同步的效果,每个关节需要根据运动距离、关节能够达到的最大速度和加速度来调整运行时的最大速度和加速度[12-13]。在这里,设定任意一个关节为参考关节,然后为每个关节设定最大速度同步系数λj和最大加速度同步系数υj。关节j的最大同步速度为λjKvj,最大同步加速度为υjKaj。下面先以两个关节为例说明同步系数的求解。
两个关节的最小运行时间为:
(9)
同步后的运行时间为:
(10)
根据公式(10)可得:
(11)
最大同步速度不可能超过最大运行速度,因此最大速度同步系数需满足:
(12)
根据公式(11)可得:
(13)
与之对应的加速时间为:
(14)
推广到n个关节可得:
(15)
根据公式(11)可以得到其他所有关节的同步系数。需要注意的是,如果关节j的运动距离不满足梯形速度的条件,即:
(16)
此时需要重新降低关节j的最大运行速度kvj,再进行关节同步。此时关节j的最大速度为:
(17)
1.3 二次抛物线加速度运动模型分析
与梯形速度运动相似,二次抛物线加速度运动也分为三个阶段:第一阶段为加速运动,第二阶段为匀速运动,第三阶段为减速运动。所不同的是,加减速阶段的加速度不是恒定的,而是连续变化的,是关于时间的二次抛物线函数,如图 1所示。这样,保证了加速度、速度和位移的连续,有效地减少冲击,确保机器人的平滑运动[14-16]。
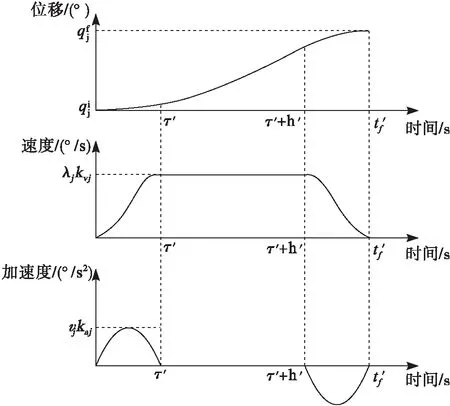
图1 二次抛物线加速度运动模型
根据条件知,在加速运动段,关节j的位移、速度和加速度应满足以下5个条件:
(18)
由这5个限制条件,可以推出位移、速度和加速度关于时间的表达式:
(19)
其中:1≤j≤n,0≤t<τ′ 。加速度在t=τ′/2处取得最大值:
(20)

(21)
由公式(20)知,二次抛物线加速度运动的加速时间是梯形速度运动加速时间的1.5倍。在匀速时间段h′中,位移关于时间的表达式如下:
qj(t)=qj(τ′)+(t-τ′)λjkvjsign(Dj)
(22)
其中:τ′≤t<τ′+h′。
减速段和加速段是对称的,即:tf′=2τ′+h′ 。在减速段,位移、速度和加速度关于时间的表达式如下:
(2t-3τ′-2h′)]λjkvjsign(Dj)
(23)
(24)
(25)
其中:τ′+h′≤t≤tf′。
根据公式(18)和公式(20)可得加速段运动的距离为:
(26)
得到整段的运行时间为:
(27)
为了能够达到最大的同步速度,运行距离必须满足:
(28)
如果该条件不能满足,必须降低最大运行速度,新的最大运行速度为:
(29)
2 轨迹规划算法实现流程
2.1 算法关键点
关节空间轨迹规划算法的实现有以下几个关键点:
(1)首先要判断轨迹的起始点和终止点是否相同,如果相同,则不需要运动,程序直接返回。
(2)需要判断每个关节的运动距离是否满足|Dj|>(3kvj2)/(2kaj),如果不满足,需要重新计算最大运行速度。
(3)进行关节同步处理时,参考关节一定要选取运动距离不为0的关节。
2.2 算法流程图
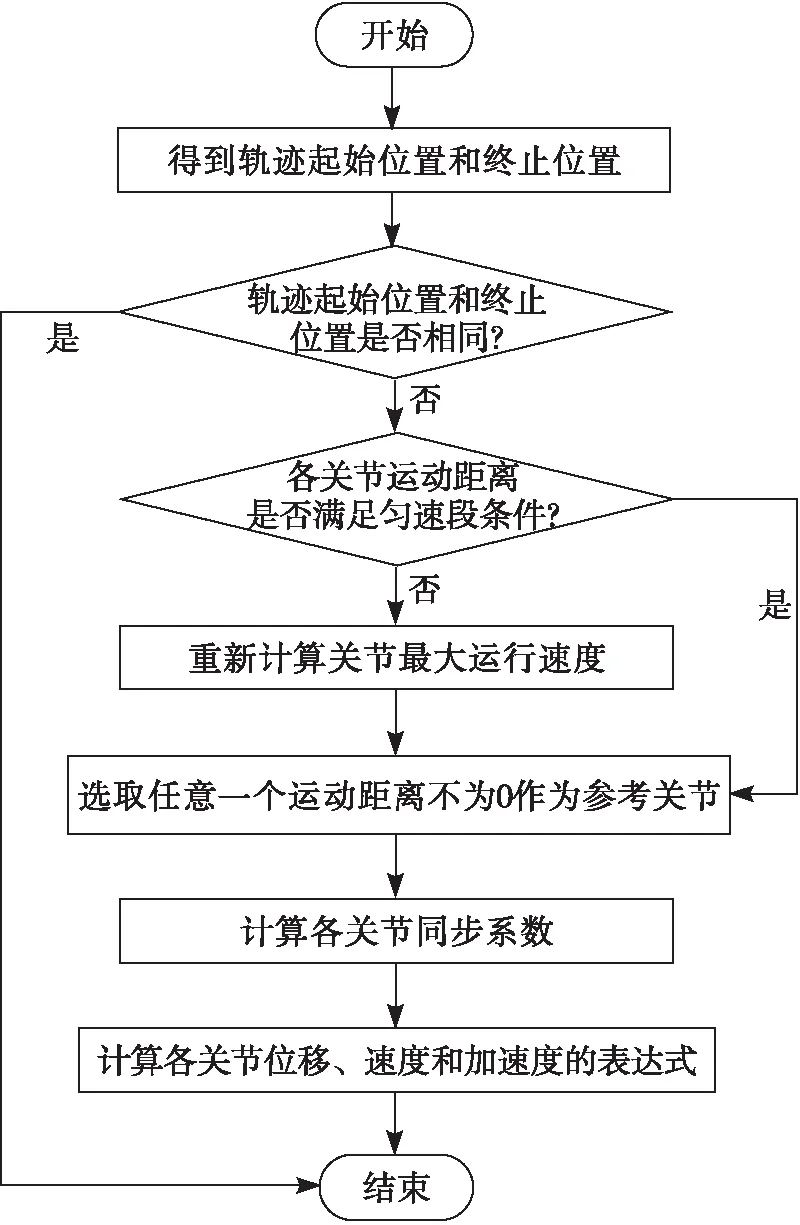
图2 算法流程图
3 仿真验证
使用MATLAB进行算法的仿真验证。如图 6所示,制作人机交互界面,可以设定各关节运行的最大速度和加速度,输入初始位置和终止位置,点击“运行”即可进行算法仿真,绘制位移、速度和加速关于时间的变化曲线。
设置各关节最大速度为(单位 °/s):[0, 60, 90, 90, 60, 60, 90];各关节最大加速度为(单位 °/s2):[120, 180, 180, 120, 120, 120];初始位置为(单位 °):[0, 90, 0, 0, 90, 0];终止位置为(单位 °):[41.5, 55.7, 63.3, 72.6, 86.7, 94.6]。利用MATLAB进行仿真计算,依次得到位移、速度和加速度的变化曲线。
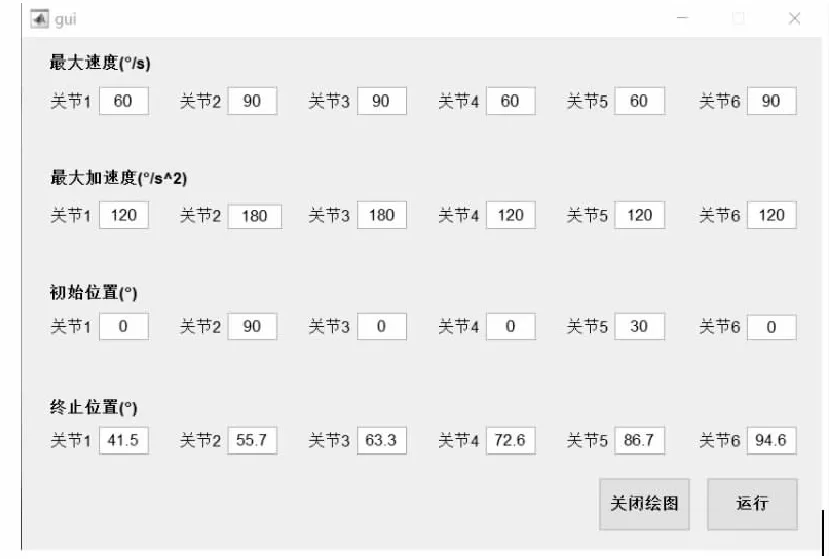
图3 人机交互界面
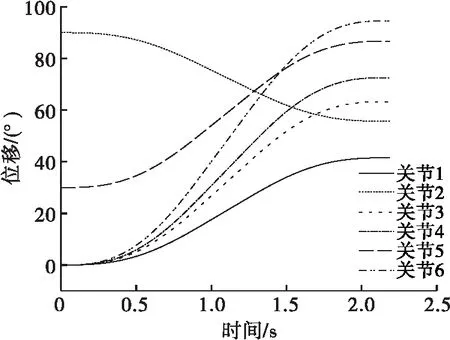
图4 位移变化曲线
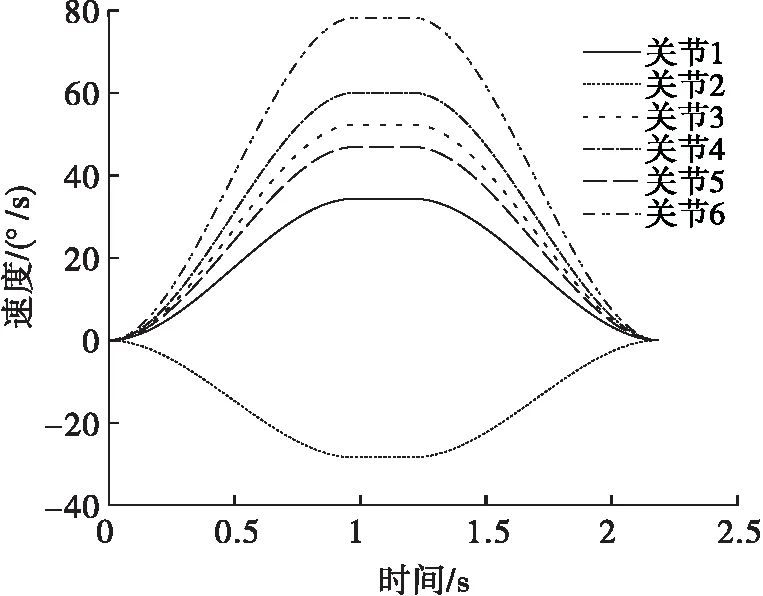
图5 速度变化曲线
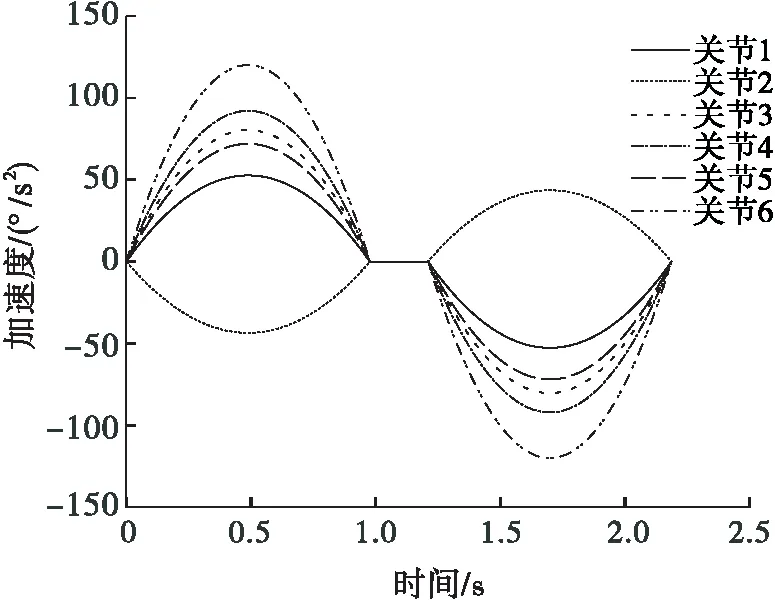
图6 加速度变化曲线
由图4可知,位移变化平滑连续,各关节运动时间相同,终止位置运动精确。由图5可知,各关节速度变化平滑连续,呈现“加速-匀速-减速”的变化方式,且各阶段变化同步,匀速运行速度逼近关节最大速度,初始速度和终止速度均为0。由图6可知,各关节加速度呈现二次抛物线变化方式,且各阶段变化同步,最大运行加速度逼近关节最大加速度,初始加速度和终止加速度都为0。
仿真结果表明:该算法能够根据各关节的最大运行速度和加速度以及初始位置和终止位置,自动规划各关节的运动轨迹;确保各关节在加速度按、匀速段和减速段都能同步运行;位移、速度和加速度都能够平滑连续的变化,提高运行平稳性;速度和加速度都能够逼近关节最大值,有效地优化运行时间,提高运行效率。
4 结论
以六自由度工业机器人为研究对象,基于匀加速-匀减速运行方式,根据电机最大速度和最大加速度参数,推导出运行位移、速度和加速度以及最小运行时间的计算公式;基于梯形运行方式,引入速度同步系数和加速度同步系数两个参数,用来解决各关节运行同步的问题;基于二次抛物线运行方式,推算出位移、速度和加速度关于时间的表达式;使用MALAB进行算法仿真验证。
该轨迹算法表达式简单,易于变成实现,保证了加速度、速度和位移的变化平滑连续,实现各关节同步运行和时间最优,确保机器人能够平滑高效地运行。
