基于改进磷虾群预测PID的电缆线径控制*
2022-04-12周克良董世镇张自建
周克良, 董世镇, 张自建
( 江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
聚四氟乙烯(polytetrafluoroethylene,PTFE)绝缘电线电缆[1~3]生产的技术关键在于对绝缘厚度的精度控制。PTFE绝缘材料被挤出包裹在芯径线上,不仅要求厚薄均匀,同时还要控制绝缘厚度的误差。传统的PTFE线径生产工艺控制方法采用常用的PID控制,该方法简单实用。但PID的参数调整依赖技术人员的个人经验。由于PTFE绝缘电缆[4]生产系统具有时变性、非线性、大滞后性的特点。传统的PID控制法无法满足当前线缆生产的高要求。因此需要研究一种更好的控制方法来解决该问题。
近年来,随着智能技术的发展,智能控制算法的出现,国内外专家学者就将其引入此领域来解决实际问题。有学者提出用动态矩阵预测[5]解决线径控制系统的滞后与惯性问题。Li H等人[6]采用了蚁群算法谋求得到合适的PID参数,并引用卡尔曼滤波算法来抑制生产中的扰动,该方法效果明显,但运算量大,对设备的软硬件要求高。Smith L[7]提出设计了Smith预估器来整定传递函数中的滞后项,消除系统滞后性。但同时也影响了传递函数,可能让控制系统出现偏差。
以上方法都在一定程度上改善了线径生产精度的问题,但依然存在响应时间较长、抗干扰能力弱等不足。本文引入改进磷虾群(improved krill herd,IKH)与动态矩阵控制(dynamic matrix control,DMC)预测的复合算法,让IKH算法对PID控制器三个参数在线调节,利用DMC[8,9]提前预测根据建立的预测模型求出调节的控制量,使系统做出调整。从而提高控制系统响应速度、控制精度及改善其滞后性。
1 线径控制系统
1.1 线径控制系统结构
电缆线径挤出系统主要包括放线机构、挤塑机、线径测试仪、冷却装置、牵引装置、收卷机构等。当芯径线放线单元放卷后,在主辅牵引机的牵引作用下,以一定速度进入挤塑机内。与此同时,绝缘原材料经过除湿和加热熔融[10]处理后被旋转的螺杆推挤出机头,均匀包裹在金属芯径线上,测径仪和火花测试仪将先后检测产品的线径数据和质量情况,并及时上传。线径推挤机控制系统结构示意图如图1所示。
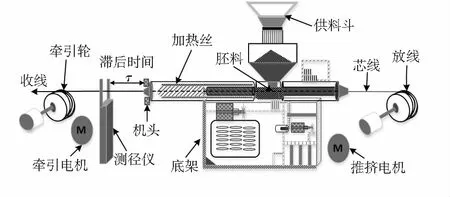
图1 线径推挤机系统结构
1.2 对象系统建模
考虑到机头附近环境因素,测径仪的设置位置距离机头较远,系统调节因此具有滞后性。为保证更好控制线径生产,一般设定推挤电机转速恒定,在推挤速度恒定情况下,滞后时间求解公式为
(1)
式中L为测径仪与机头的距离,Vtraction为牵引速度。推挤机结构部分可等效一阶惯性环节加纯滞后环节,调速系统作为直流闭环调速系统,可用二阶惯性环节表示,因此,推挤机线径控制系统对象模型可近似为
(2)
式中K为比例系数;T1,T2为惯性时间常数;τ为滞后时间常数。
2 基于IKH预测PID控制系统设计
2.1 系统框图设计
通常在推挤过程中,两根胚料接头处存在间隙或者胚料存在断裂等情况都将使系统变得不稳定,线径波动较大。这些情况可看作某个扰动信号。针对该系统的特点,设计出基于IKH预测PID控制框图,如图2所示。

图2 IKH预测PID线径控制框图
IKH预测PID线径控制由控制部分与预测部分组合而成。首先,系统根据预测模型经过在线反馈校正预测出下一时刻机头模口线径值yp,给定目标线径yr比较得到误差值e和线径误差变化率ec。根据e和ec值,IKH对PID三个参数进行在线优化调整。输出量u,即挤出机调速器的输入电压值,作用在挤出机对象上对电机调速,以此来调节线缆线径大小。最终得到无限逼近目标值的线径值。
为了得到PID控制器的最优参数,需要选取使控制达到最优效果的合适的适应值函数,此处选用时间乘绝对误差绝对值的积分,即

(3)
式中t为时间,ts为积分时间上限,e(t)为目标与预测的线径误差值。
2.2 磷虾群算法及其改进
2.2.1 磷虾群算法
对自然界磷虾觅食活动规律深入研究后,Gandomi等人于2012年提出了磷虾群(krill herd,KH)算法[11],KH算法是对自然界KH觅食活动的模拟。KH算法的主要内容如下[12,13]。
一个有N只磷虾的磷虾群在觅食过程中,磷虾的第K次位置更新会受3种因素的综合影响:
(4)
(5)

(6)

(7)
式中Dmax为随机扩散速度,Imax为最大迭代次数,δi为当前的随机扩散方向向量,且为区间[-1,1]的随机数。磷虾从t经过Δt时间后的位移公式为
(8)
(9)
式中 Δt为速度矢量比例因子,P为变量总数,Uj和Lj分别为第j个变量的上、下界,差值决定搜索范围Ci∈[0,2]为常数。
在上述三种因素的综合影响下,每只磷虾不断更新自身位置,直至当前最优磷虾位置出现或达到最大迭代次数后停止。
2.2.2 IKH算法
关于磷虾群算法过早收敛陷入局部最优的情况,对此选择在原算法的基础上引入进化算子α和优化算子β以增强KH算法[14]的自适应调节能力。
1)进化算子α
由于参照的是优胜劣汰法则,进化算子α可以加快算法的寻优速率。具体操作为:α会对每个磷虾的适应值进行对比并排序,收集适应值最小的K个磷虾样本用于下一繁殖,每一次迭代将会产生同样多的新个体,继续对所有新旧个体按适应值大小排序,重新筛选。以此往复,直到最后一次迭代完成
(10)

2)优化因子β
根据与最优磷虾位置的距离对磷虾个体现在位置的移动速度做出调整。两者距离越近,则移动速度越慢,导致算法寻优速度降低。为此,引入一个优化算子β,来提高算法在接近最优解时的局部搜索能力。根据以下公式进行操作
(11)

2.3 DMC算法原理
DMC是基于阶跃响应的增量控制,其通过预测模型及过去和当前的偏差值来预测未来的偏差然后通过进行滚动优化的方式,确定出最优输入。
2.3.1 预测模型
预测模型是通过对测定对象采集输入输出数据建立的。首先,测定对象单位阶跃响应的采样值ai=a(iT),i=1,2,…。根据采样值建立模型的预测向量为ai=[a1…aN]T,N表示建模时时域长度。然后,假设其他情况不变,K在时刻对对象施加一个控制增量Δu(k)时,仅在Δu(k)起作用的情况下,可以得到未来时刻对象的N个输出值。则对象未来的P个预测输出值向量可表示为
ym(k)=y0(k)+aΔu(k)
(12)
ym(k)=[ym(k+1),…,ym(k+p)]T
(13)
Δu(k)=[Δu(k,k),…,Δu(k+M-1,k)]
(14)
式中ym(k)为K时刻在控制增量Δu(k)作用下的模型预测值;y0(k)为模型输出初始值;p为优化时域长度;M为控制时域长度;N为建模时域长度;(k+1,k)为在k时刻对k+1时刻的预测。在对线径挤出机对象模型的单位阶跃响应曲线分析过后,此次选用采样周期T=0.5s,N=20,P=15,M=1。
2.3.2 在线反馈校正
由于每次调节只采用第一个控制增量Δu(k)对对象实施调整,相当于在输入端增加一个幅值为Δu(k)的阶跃。然而在实际操作过程中,由于环境影响,预测输出有可能偏离实际输出,所以对未来时刻预测值在线实行校正。实时校正便是在下一时刻将对象的实际输出y(k)与式(13)得出的未来时刻预测值ym(k)进行差值运算
e(k+1)=y(k+1)-ym(k+1,k)
(15)
然后,通过添加由权系数组成的N维校正向量h=[h1,h2,…,hN]T用实时滚动的方式进行校正
yp(k+1)=ym(k+1)+he(k+1)
(16)
此次选取h1=h2=…=h20=0.9,而表达式yp(k+1)表示校正后的输出预测向量,经过移位后又作为下一刻的初始输出预测向量。
3 系统仿真与结果分析
3.1 仿真实验数据

3.2 动态响应性能分析
由图3和表1分析可知,IKH迭代52次即可得到最优解,最优值为0.179 2;而KH则需迭代66次左右才可指导最优解,最优值为0.264 3,对比可知IKH的寻优速度更快,能力更强。

图3 适应值与迭代次数关系

表1 KH和IKH算法寻优结果比较
3.3 阶跃响应和抗干扰分析
为了比较不同控制方法的抗干扰能力,设定线径标准值为1 mm,在25 s处加入大小为0.4的扰动。系统参数稳定时的扰动和阶跃响应曲线如图4所示。

图4 参数不变时扰动和阶跃响应曲线
由图4和表2可知:未增加扰动时,采用传统PID控制,虽然响应速度最快,但系统的超调量最大约为29.74 %,调节时间约为20 s,线径波动较大,而KHPID控制超调量次之,改进后的KH预测PID控制几乎无超调,响应速度较比原KH算法快一些。且调节时间最少。

表2 参数不变时扰动和阶跃响应数据
3.4 参数鲁棒性分析
将系统纯滞后时间常数增大50 %,增益增20 %,观察系统的阶跃和扰动响应曲线变化情况并进行比较。响应曲线如图5所示。

图5 参数变化时扰动和阶跃响应曲线
根据图5和表3可知:当系统参数改变后,传统PID的超调量有所增加,调节时间增加至24 s,可见传统PID的抗干扰能力并不弱;KHPID控制的超调量增加到24.06 %,变化幅度较大,调节时间多了3 s,调节速度较快;IKH预测 PID控制算法受滞后时间变化影响最小,超调量约为4.35 %,仍能保证良好的控制效果。说明该算法在线调节能力好,抗干扰能力较强,响应速度较快。

表3 增加滞后与扰动后的响应数据
4 结 论
针对具有滞后特性的电缆绝缘厚度推挤机系统,本文提出的利用IKH算法优化PID参数以及DMC预测来降低系统滞后性的策略,在相同的滞后时间情况下,与传统PID控制器和KHPID控制器进行了仿真对比实验,结果表明:IKH预测PID控制具有响应速度快、超调量小、鲁棒性强等优点,有一定实际应用意义。
