基于Hopfield神经网络的供电网黑启动分区方案计算方法
2022-04-12柯贤波白莉红高炜欣刘兴华
程 林,柯贤波,霍 超,杨 庆,白莉红,高炜欣,刘兴华
(1.国家电网有限公司西北分部,陕西西安 710048;2.中国能源建设集团西北城市建设有限公司,陕西西安 710038;3.国网陕西电力科学研究院,陕西西安 710100;4.西安石油大学电子工程学院,陕西西安 710065;5.西安理工大学电气工程学院,陕西西安 710048)
0 引言
目前,电网大面积停电的风险依然存在。2019年阿根廷及其周边国家曾遭遇有史以来最严重的大停电事故。研究大范围停电事故发生时的电力供应的快速恢复问题,已经成为电力研究的重要课题。文献[1]利用改进模拟退火算法进行网架重构以保证待恢复节点和电源距离最短,优先恢复一类负荷提高了网络的恢复效率。文献[2]以停电损失最小作为目标,对主动配电网建立了黑启动分区的混合整数规划模型,实现了以经济手段量化大停电事故损失。文献[3]以子系统之间的割集边的数量最少为目标,构建了整数线性规划(Integer Linear Programming,ILP)模型,通过添加“割”约束,得到足够多数量的子系统划分方案,通过改进模块度指标Q、子系统恢复时间和无功裕度等指标,使方案更加合理。文献[4]在停电电网分区时考虑了各子系统的恢复时间,提出基于粗糙集的分区调整策略。文献[5]针对黑启动并行恢复过程,将黑启动分区优化问题转化成了求解凸二次规划的问题,降低了黑启动分区求解的难度。文献[6]以最小化停电损失为目标建立了输配电网黑启动优化模型,利用目标级联法提高了系统的恢复效率。文献[7]将黑启动分区优化问题和广域向量测量系统结合起来,在整数线性规划基础上,提出一种计及系统客观性的分区规划模型。文献[8]以电网结构坚强性为主要目标,建立了计及恢复均衡性的柔性分区优化模型。文献[9]以网架恢复时间最短为目标构建数学模型,并利用小生境遗传算法进行求解,取得了较好的效果。文献[10]针对黑启动分区方法太过依赖算法、难以直接求解获得全局最优解的特点,提出了一种半监督黑启动分区方法。文献[11]考虑风力发电的不确定性,以机组恢复成功率为约束,提出一种随机相关机会目标的黑启动规划模型,并结合粒子群算法和随机模拟技术进行求解。文献[12]对微网黑启动过程的多个步骤进行研究,提出含DG 特性的黑启动指标并将其应用于黑启动电源的选择,以恢复负荷最大化为目标,通过二进制粒子群算法求得最优解。文献[13]以最小停电损失和最大恢复发电为目标,构建了一种将微网视作为黑启动电源的网架重构模型。文献[14]针对系统恢复过程中的众多不确定因素,提出了保底网架构建方法,对恢复过程中多个影响因素量化处理并进行选优,提高恢复成功率。文献[15]建立了一种鲁棒优化机组恢复模型,考虑机组恢复时间的不确定性,通过交叉粒子群算法得到了机组的最优恢复顺序。文献[16]针对黑启动恢复初期的电压不稳定现象,提出风储火多源调控思想,并对多个指标进行自适应调节。文献[17]以发电量最大和子系统联系最小为目标,提出一种考虑黑启动分区机组重启的全局优化方法,采用广义Benders 分解法获得最优解。文献[18]提出基于复杂网络理论的黑启动分区方法,反映了各子系统间紧密程度、分区质量和最佳分区数量。文献[19]提出了一种双层优化网络重构模型,利用粒子群算法求解证明了黑启动电源不足情况下,电动汽车充电站作为黑启动电源的可行性。文献[20]提出了一种基于混合整数线性技术,考虑各子系统恢复过程的黑启动分区方法,可迅速得到多种划分方案供系统运营商选择。文献[21]以模糊机会约束规划为基础,建立了黑启动的最优网络骨架模型,采用粒子群和模糊仿真相结合的优化算法进行求解。文献[22]提出了一种考虑恢复可靠性的子系统划分方法,采用二元决策图算法进行求解,以更好的适应实际运行条件。文献[23]提出了一种新的网络分区算法,以提高各子系统恢复时间和发电负荷比。文献[24-25]基于不同算法分别提出了黑启动的优选方案。
从已有研究来看,当停电范围较大,系统内具备多个黑启动电源时,将停电系统分为若干子系统进行独立恢复,是黑启动研究的一个重要思路。但此类问题从数学上看是一种多目标、多约束的非线性组合优化问题,难以用解析式准确描述,用常规的求解方法难以处理。本文以各分区联络最简和简化操作为目标,建立了可以用解析式描述的黑启动分区数学模型,并利用Hopfield 神经网络进行求解。
1 分区方案数学模型
1.1 分区方案的目标函数
合理的电网黑启动分区方案可以提高恢复供电的效率,提高电网供电可靠性。从降低供电复杂性的角度考虑,分区方案首先要保证各个分区之间的连接线路最少且各个分区的操作最简,因此数学模型可以描述为:
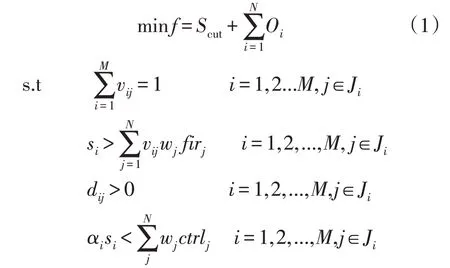
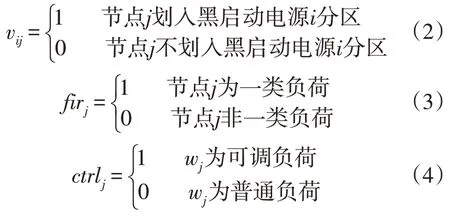
式中:Scut为各分区联络线之和;Oi为分区i的操作简单程度;M为黑启动电源个数;N为除黑启动电源外其它节点数;si为分区i的黑启动电源的输出功率;wj为负荷节点j的功率;Ji为分区i所供节点的集合。dij为分区i的黑启动电源至节点j的最小拓扑距离,即分区i的黑启动电源通过广度搜索方式连接至节点j的最少供电路径。αi为分区i的黑启动电源最小出力系数。vij,firj和ctrlj分别为节点j是否划入分区i的标志变量、节点j是否为一类负荷的标志变量和节点j是否为可调负荷的标志变量,定义如下:
为更加清楚地描述电网结构,算法采用最小拓扑关系矩阵dij对黑启动电源Bi与负荷节点wj之间的最小距离进行描述,如表1 所示。其中,w1~wN为系统中的负荷节点;B1~BM为M个可以黑启动的电源节点。
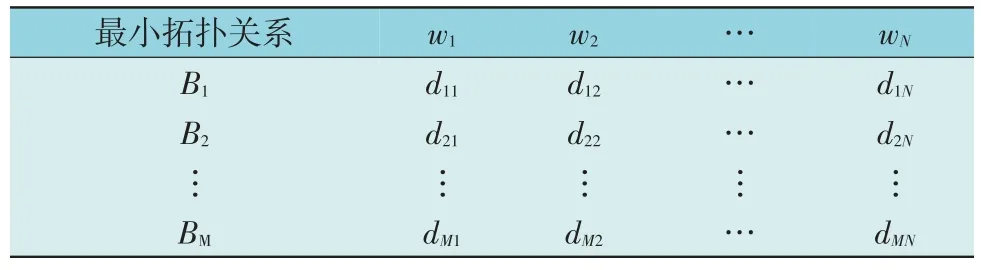
表1 最小拓扑关系矩阵Table 1 Minimum relation matrix among topologies
由于求解的目标是分区联络线之和Scut,它和节点间的连接属性密切相关。根据各个节点的关联关系,可以建立如表2 所示的节点关系矩阵表,其中各单元用eij表示。
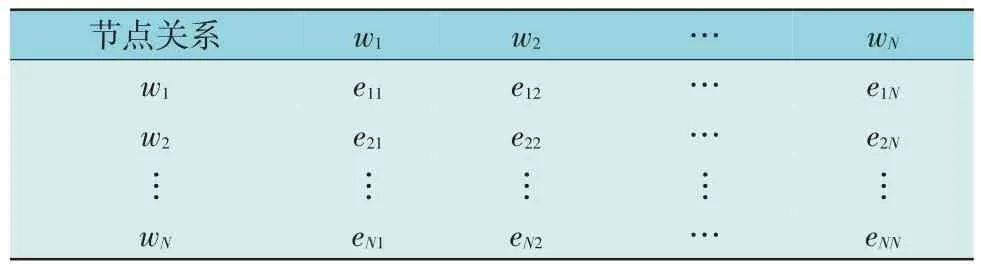
表2 节点关系矩阵Table 2 Relation matrix among nodes
eij的数学描述为:

在黑启动分区明确的基础上,由式(2)的定义可以构建如表3 所示的规划状态矩阵。
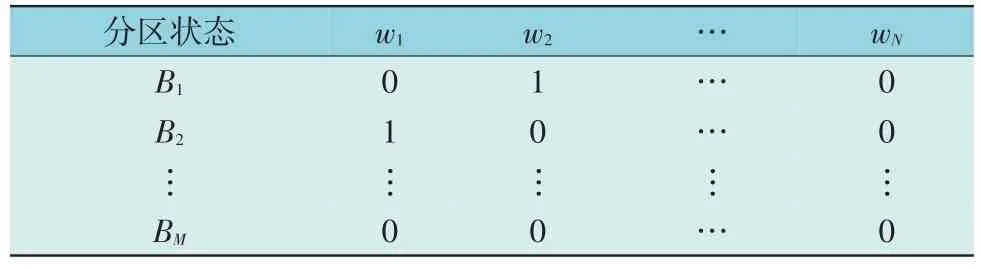
表3 分区规划状态矩阵Table 3 Partition planning status matrix
表3 中单元(i,j)的值即为vij。vij=1 的单元表示对应列的负荷点划入对应行黑启动电源所在子系统分区,vij=0 则不划入对应的子系统分区。由式(2)定义可知,由于1 个负荷点仅能划入1 个黑启动分区,因此表3 中每一列元素之和应为1。
1.2 分区方案目标函数的数学模型
对于分属于黑启动分区i和m(i≠m)的不同节点j和n而言,j和n是否存在联络线可以表示为:

式中:i和m为分区编号;j和n为节点编号。
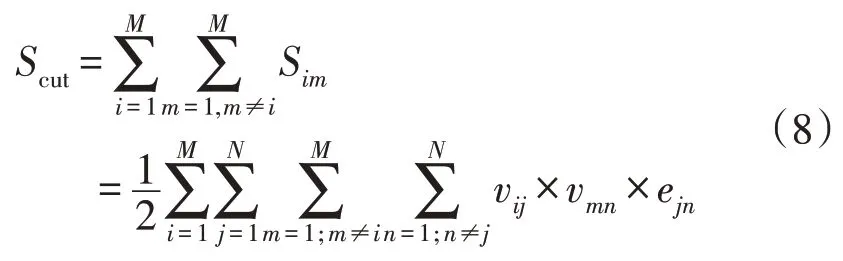
由式(6)可得分区i与m之间的联络线数目Sim为:

其中,增加系数1/2 是因为式(7)同时统计了j和n以及n和j之间的联络线,使联络线数目增加了1 倍。由式(7)可得各个分区联络线总数Scut为:
在表1 和表3 基础上可定义操作复杂度Oi为:

因此,分区方案目标函数式(1)的数学模型可以表示为:
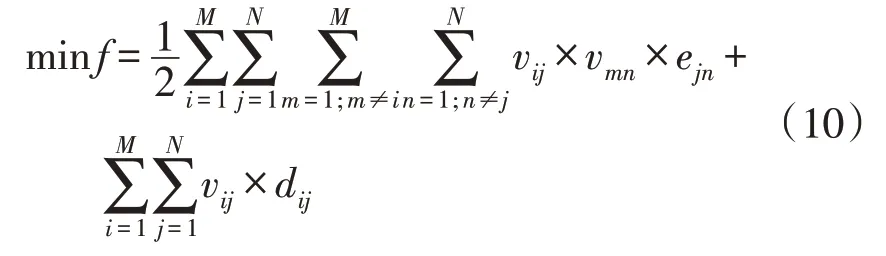
其求解目标为vij,i=1~M,j=1~N。式(10)为1个有各类约束条件的0-1 规划问题,属于整数规划问题。
从计算复杂性来看,几乎所有整数规划问题都属于困难问题,很少有精确的多项式算法。对此类问题的求解,主要考虑各种特殊问题的近似算法。而式(10)的表示形式与Hopfield 神经网络的计算能量函数形式相同。与图论算法和规划算法相比,连续型Hopfield 神经网络的传递方式是通过并行传播实现数据的同时处理,其计算量不会随着时间的增长而发生维数上的变化,避免了“组合爆炸”问题。数值计算中,通过解微分方程组的方式,Hopfield 神经网络的能量函数是朝着梯度减小的方向变化的。因此利用Hopfield 神经网络进行0-1 规划问题的求解时,仅需要网络演化的最终状态,而不关心详细的状态演化轨迹,这对黑启动分区问题求最优解极其有利。求解时,可以使用较大的时间步长,而无需担心数值模拟的中间结果是否接近某一条状态演化轨迹。这相较于遗传算法等需要编码且在交叉变异过程中,每一代均需按照适应度函数进行优胜劣汰的选择,演化产生更好近似解的方法相比实现过程更为简单。因此本文提出利用Hopfield神经网络求解分区方案。
2 神经网络模型
2.1 Hopfield神经网络原理
Hopfield 神经网络是一种可以由硬件实现的连续型神经网络,这种神经网络系统自身的能量会随时间不断减少,在达到平衡状态时能量最小[26]。其神经元取值范围为[0,1]的连续性值。Hopfield 神经网络的硬件电路如图1 所示。
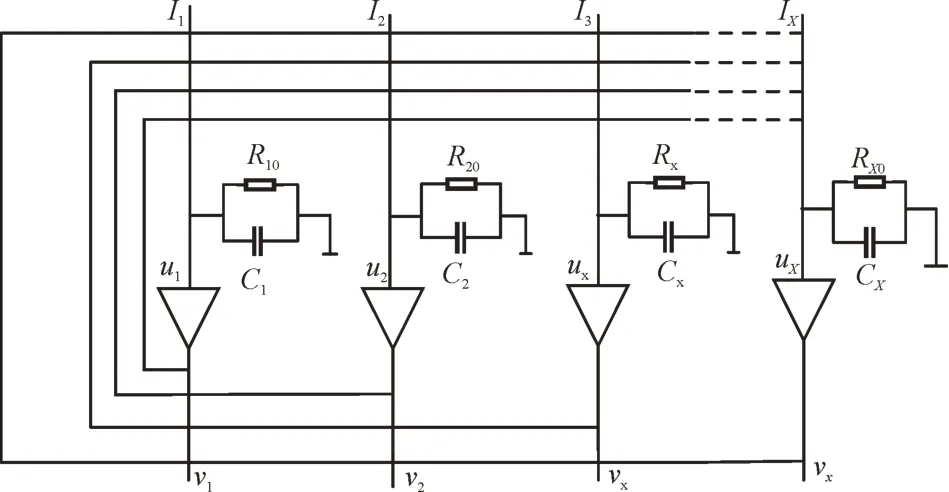
图1 连续型Hopfield神经网络电路Fig.1 Continuous Hopfield neural network circuit
由图1 可知,由X个神经元构成的Hopfield 神经网络中,单个神经元由电阻Rx0、偏置电流Ix,电容Cx和运算放大器模拟。ux为神经元x的内部状态,运算放大器的输出vx作为神经元的输出。图1 所示电路的各个运放单元具有非线性的特征,其互联结构模拟了人脑神经元互联的主要特点。由基尔霍夫定律,可得连续型Hopfield 神经网络的电路方程为:
式中:Rxy为神经元x和y之间的连接电阻。
该电路方程描述了神经元的输出vx和其内部状态ux之间的关系,式中的f()· 采用S 型函数时,整理式(11)可得Hopfield 神经网络系统的动态方程:

式中:wxy=1/(RxyCx)为神经元x与y之间的连接权值;τx=RxCx,;u0为引入的1 个调节参数,不同的u0会使S型函数的值发生变化,当u0不断减小时,S型函数逐渐趋于1 个阶跃函数。
因此,式(12)表达的网络动态可用1 个计算能量函数Es表示:
能量函数值随着时间的推移将减小至某一平衡状态,平衡点即为Es的极小值,因此Hopfield 神经网络具有自动求能量函数极小值的功能。这一特性与式(1)表示的分区方案优化目标函数求最小值的思想完全吻合,因此可以利用Hopfield 神经网络能量函数表示目标函数式(1)的数学模型式(10)。实际规划计算中,为了保证电网的稳定运行,构建能量函数时需同时考虑保证电网分区的约束条件。
2.2 黑启动电网分区神经网络模型
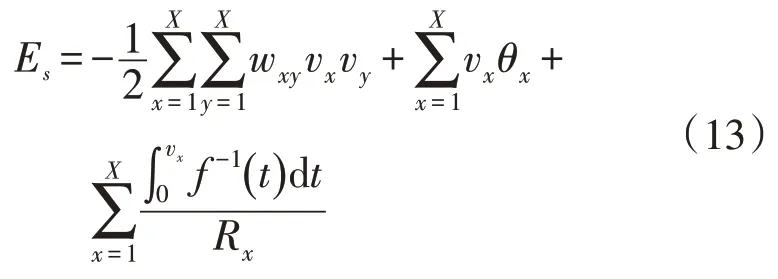
分区方案优化目标函数的数学模型式(10)的求解目标为计算规划状态表(3)中的vij值。可以构建输出如表3 所示的二维Hopfield 神经网络模型,将vij作为神经网络的输出。同时计及分区优化目标和系统运行各种约束条件的连续型Hopfeild 神经网络的能量函数如式(14)所示:
式中:wj为负荷节点j的容量;si为黑启动电源Bi的容量;vij为神经元(i,j)的输出,含义同式(2);Δ 为比例放大系数,一般可取为0.01。
能量函数E由5 个分项E1,E2,E3,E4,E5 共同作用构成,分别对应优化目标以及各个约束条件,第1 项对应数学模型式(1)的约束条件1。约束表3 中的每1 列有且仅有1 个单元为1,其余单元为0,以保证每1 个负荷点划入唯一的黑启动分区。第2 项对应目标函数式(1)的约束条件2。在γi>0 时=0,否则=1。约束可黑启动电源点i的容量大于其供电区域内一类负荷总量,以保证供电区域的供电功率平衡。第3 项对应目标函数式(1)的约束条件4。约束τi>0 时否则=1。保证每一个分区内的可调负荷量大于黑启动电源的最小出力。第4 项对应目标函数式(1)数学模型式(10)的第2 项。保证各个黑启动分区的操作最简。第5 项对应目标函数式(1)数学模型式(10)的第1 项。保证各个分区的联络线最少。
为避免原Hopfield 神经网络陷入无效解,根据文献[27]提出的求解方法,将网络的动态方程改为:

式中:uij为神经网络中神经元(i,j)的输入。
由式(14)和式(17)可得神经网络的动态方程为:

式中:uv为归一化系数,可取为0.01 或更小。
利用欧拉法求解式(18)即可得表3 中各单元的元素值,由表3 即可得各黑启动电源供电分区。
在迭代求解式(18)过程中,可能会出现多个可行解的情况,可以通过选取能量函数最小值的方式获得最优解,实现算法如图2 所示。其中,K为迭代次数。
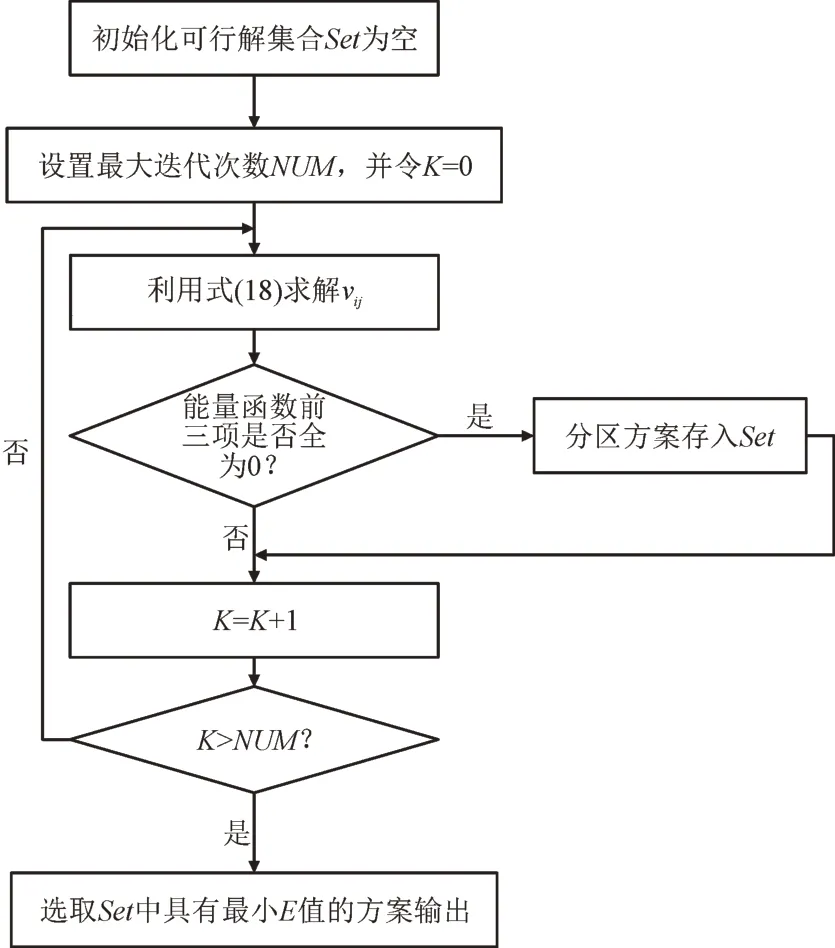
图2 算法流程图Fig.2 Algorithm process
3 分区方案综合评价
为了论证文中所提分区方法的可行性,本文运用层次分析法(Analytic Hierarchy Process,AHP)对所提分区方法与其他方法分区方法的分区效果进行了评价分析,评价指标如下:
1)系统恢复时间C1。系统的恢复时间为各子系统恢复时间的最大值,即:

式中:ti为分区i的恢复时间。
如果对系统划分不合理,会出现各子系统间的恢复时间差异过大,1 个子系统的恢复时间过长从而拉长整个系统恢复时间的情况。
2)机组容量分配C2。子系统划分时,应尽量把非黑机组均匀划分到各子系统内,避免出现一个分区内黑启动机组功率很小、非黑启动机组容量很大,而另一个分区内黑启动机组功率很大、非黑启动机组容量很小的情况。文中将各分区内单位黑启动机组功率需承担的非黑启动机组功率之间的方差作为评价黑启动分区的指标,其定义如下:
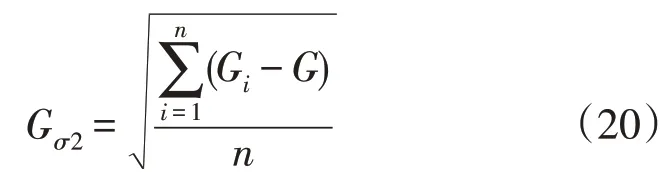
式中:Gσ2为各分区内单位黑启动机组功率需承担的非黑启动机组功率之间的方差;Gi为各个子系统单位黑启动机组功率需承担的非黑启动机组功率;G为整个系统单位黑启动机组功率需承担的非黑启动机组功率。
Gσ2越小,说明分区划分的越合理。
3)模块度C3。采用模块度指标来衡量黑启动子系统的网络结构强度:

其对应的矩阵形式的计算公式为:

式中:z为边的个数;kj为节点j的度数;Ajn为节点j和n是否相连,相连为1,否则为0;cj,cn分别为j节点和n节点;δ(cj,cn)为取0-1 函数,cj,cn在同一分区时δ(cj,cn)=1,否则为0。Tr()为求矩阵迹的函数;S为所属关系矩阵,其中元素表示为Sij,Sij为节点j是否属于子系统i,属于Sij值为1,否则为0,B为计算过度矩阵,其中元素表示为Bjn;模块度越大说明划分越合理。
4)联络线与操作复杂度之和C4。指标C4是本文所提的分区方案算法的优化目标模型,详细计算过程见式(14)-式(18)所示。
指标C1~C4中,系统恢复时间与联络线与操作复杂度之和优先度最高,即在保证恢复时间和联络线与操作复杂度之和最优的前提下保证各分区的机组均匀分配和紧密连接。建立的指标层对目标层评价矩阵如表4 所示。
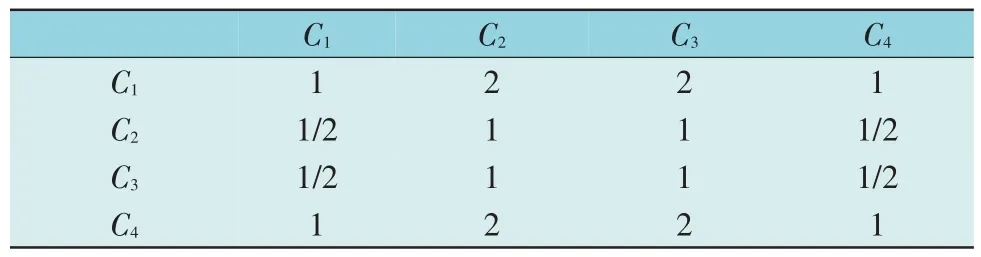
表4 指标评价矩阵Table 4 Index evaluation matrix
表4 中为1 的元素表示对应行指标与对应列指标同等重要;为1/2 的元素表示对应行指标没有对应列指标重要;为2 的元素表示对应行指标比对应列指标重要。以此基础上,对所提出的分区方案的可行性进行评价分析。
4 算例分析
采用IEEE 39 节点系统进行测试,验证所提模型及算法的有效性,图3 为IEEE 39 节点系统,参数设置采用参考文献[3]的设置,节点30,33 机组具有自启动能力。设置水电机组αi为0,火电机组αi为0.35,负荷节点的1 类负荷比例为20%。

图3 IEEE 39节点系统Fig.3 IEEE 39-bus system
各条线路恢复时间如表5 所示。
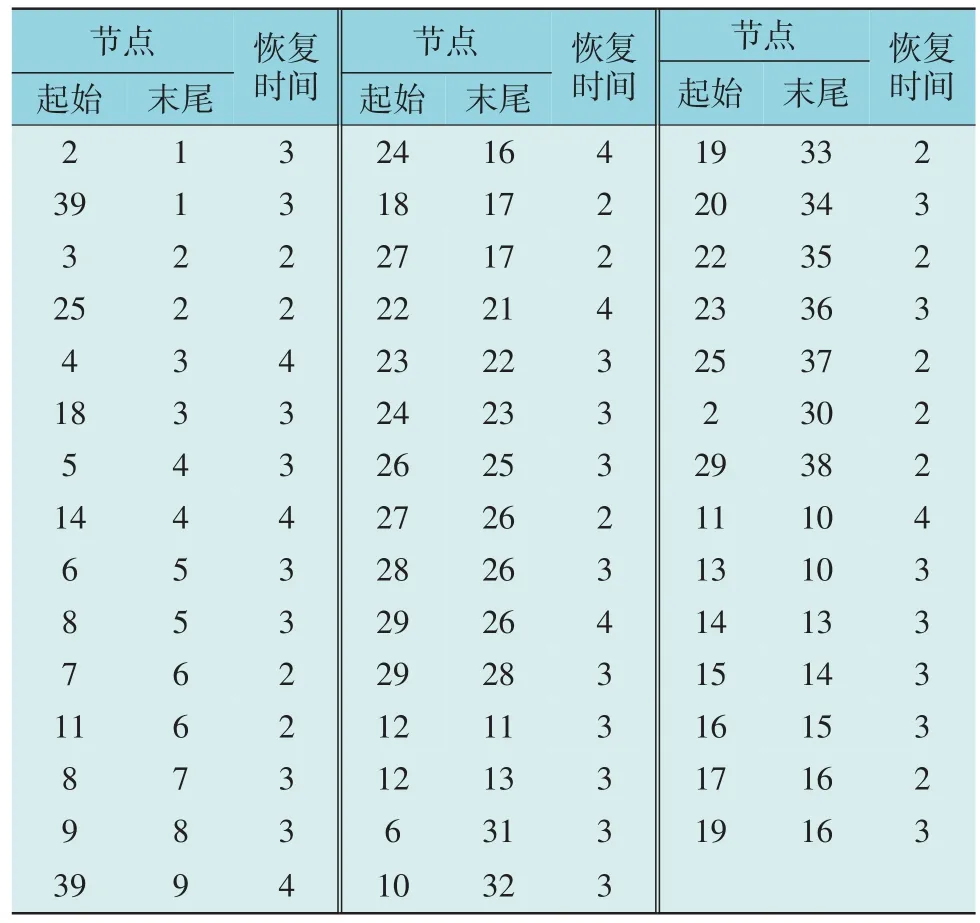
表5 线路恢复时间Table 5 Recovery time for line min
计算中E1~E5 的取值分别为E1=1 000,E2=200,E3=200,E4=20,E5=80。利用欧拉法求解式(18)时,计算步长取为0.01,比例放大系数Δ=0.01,迭代计算基数上限NUM为300 次。计算结果如图4 所示。
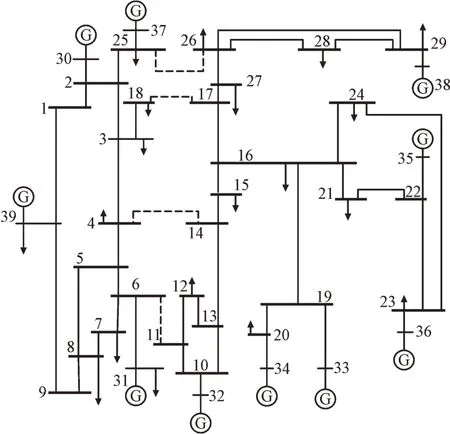
图4 电网分区图Fig.4 Power supply network partition
图4 中,虚线为2 个分区的联络线。利用本文所提算法求出的联络线为4,总供电操作的复杂程度Oi为153。将本文所提算法求得的分区方案与其他区方案中子系统间联络线与操作复杂度对比可得表6,其中方案2 为文献[3]所提分区方案。
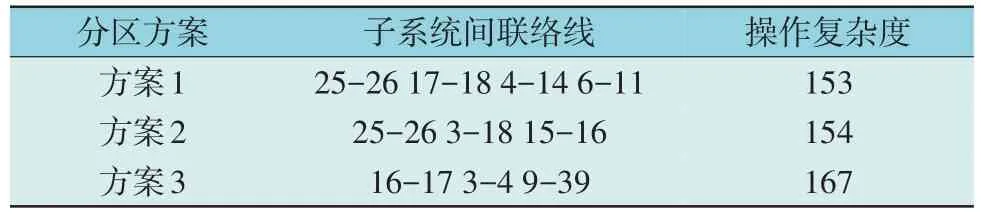
表6 分区方案Table 6 Partition scheme
分别求取IEEE-39 节点系统的3 种分区方案的各指标值,具体数据如表7 所示。

表7 方案指标数据表Table 7 Indicators of three schemes
根据表7 的各方案指标数据,构造方案层对指标层的对比矩阵,3 种方案对于4 个指标C1,C2,C3,C4的对比矩阵T1,T2,T3,T4分别为:
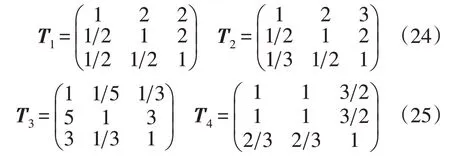
式(24)和式(25)的对比矩阵均满足一致性检验要求,采用AHP 法可得各方案综合重要度向量θ如下:

由式(26)可知,本文所提的分区方案1 综合重要度最大,即方案1 综合最优。
5 结语
与文献[3]相比,本文所提方案在模块度指标上不占优,但在联络线和操作复杂度之和、恢复时间和机组容量分配3 个指标中占有明显优势,机组容量分配均衡程度是其它2 个方案的3 到4 倍。所得方案不仅系统恢复时间最短且非黑启动机组几乎均匀的分到了2 个分区内,满足数学模型联络线最少且操作最简的目标。
文中通过构建规划状态表,建立了黑启动分区联络线最小的数学模型解析表达式,为准确求解黑启动分区奠定基础;通过定义总供电操作的复杂程度可以使得黑启动分区的操作简化,完善黑启动分区求解中的实际考虑因素;通过定义合理的能量函数实现利用解微分方程组的方式直接获得黑启动分区方案。而非提供一组需要再进行比较选择的解集,计算过程简洁明了,降低了计算的复杂程度。
