佛山地铁车辆全自动运行模式下智能运维的探索
2022-04-09黄健
黄健


摘要:通过对全自动运行、智能运维等相关规范、文献的研读,结合相关技术行业内应用情况及发展情况,分析佛山地铁车辆专业全自动运行模式的主要配置,并由此形成智能运维系统配置建议。此外,还总结了车辆全自动运行及智能运维的联系,展望了车辆全自动运行、智能运维发展方向及需提前谋划的事项。主要结论为:创新性地结合车辆全自动运行模式功能要求,在分析车辆全自动运行主要配置的同时,有针对性地分4大模块提出了车辆智能运维设备配置建议,以实现关键设备的实时状态监测、故障预测、故障预警、应急处置等,进一步提高了车辆专业全自动运行模式下的安全性、可靠性,总结了两者相辅相成、协同降低维护成本的关系。
关键词:佛山地铁;车辆;全自动运行;智能运维
中图分类号:U231.6
文献标志码:A
文章编号:1009-9492f 2022) 02-0177-05
0 引言
近年来,随着大数据、数据中台、云计算、边缘计算、CBTC等技术发展,地铁行业全白动运行及车辆智能运维相关技术发展迅猛。轨道交通全自动运行( FullyAutomatic Operation,FAO)是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代轨道交通控制系统,是进一步提升现有基于通信的列车运行控制 ( Communication-based Train Control,CBTC)系统的安全性和效率的国际公认发展方向[1-3]。预计到2023年我国将有19座城市拥有40条全白动运行线路,共计1 200 km,全自动运行模式将逐渐成为后续地铁建设的主流。车辆智能运维研究也是近年的研究热点,各大地铁公司均有不同程度应用相关设备,相关设备技术可靠性、监测准确性逐渐提升,并逐步形成相关行业规范。
全自动运行技术及智能运维作为行业发展趋势,两者相辅相成,全自动运行技术进一步为智能运维设备的应用提供了平台,智能运维则是全自动运行技术可靠性、安全性等方面的重要补充。全自动运行技术与设备智能运维技术具有相同的技术特点,即均体现技术的智能化、自动化、信息化,探讨全自动运行模式下的智能运维具有重要意义[4]。目前国内对全自动运行车辆主要配置、车辆智能运维均有不少研究,但两者统筹考虑的相关研究还比较少。本文以佛山地铁新一轮规划建设为例,结合车辆全白动运行、车辆智能运维的特点及发展趋势,通过对相关规范、文献的研读,了解相关技术行业内应用情况及发展情况,讨论分析在全自动运行模式下车辆智能运维的定位及功能需求,以使车辆智能运维与全自动运行模式更好地相结合,以期在新线规划、筹备阶段更好地统筹考虑车辆智能运维架构及配置。
1 城市轨道交通传统运行模式及设备运维模式分析
根据国际标准IEC 62290[5]的定义,轨道交通自动化等級共分为5个等级,分别是COAO、COAI、COA2、COA3、GOA4。自动化等级的定义是基于轨道交通列车运行中所完成规定功能对运营人员和系统的责任分配。其中COAO、COA1为非自动运行模式;COA2为半自动运行;COA3为有人值守下列车自动运行(DTO);COA4为无人值守下的列车自动运行(UTO)。
传统的城市轨道交通应用最广泛的运营模式为ATO驾驶模式,即COA2等级。在该模式下,司机在驾驶室内对电客车状态及线路轨道情况进行监控,并进行必要的故障处理、应急处置。传统的城市轨道交通运行模式在运营组织灵活性、运营能力、运营成本、司机劳动强度等方面均存在不足。传统的城市轨道交通车辆运维模式采用的是计划性检修加故障维修的方法,是基于检修规程周期性地开展车辆检修工作,列车状态及故障监控、报警是利用列车列控系统实施的。传统的城市轨道交通车辆运维模式缺少全生命周期跟踪及关键部件实时状态监控、预警等功能,因此运营设备易出现过修、欠修及应急事件等状况。同时,由于设检修主要是由作业人员按照检修规程进行主动检测,受作业人员身体和精神状态的影响,也易发生漏检、错检等情况[6]。
2 佛山地铁车辆全自动运行主要配置分析
根据国际标准IEC62267[7],不同自动化等级对列车运行的基本功能需求有所差异。如表1所示,IEC62267对自动运行的基本功能主要包括保证列车安全运行、驾驶列车、监控轨道、监控乘客上下车、列车运行、紧急情况的检测与处理等6部分。保证列车安全运行、驾驶列车功能在COA2等级下已由ATP、ATO实现,下面将重点讨论监控轨道、监控乘客上下车、列车运行、紧急情况的检测与处理等4种功能需求下车辆的关键技术。
2.1 监控轨道
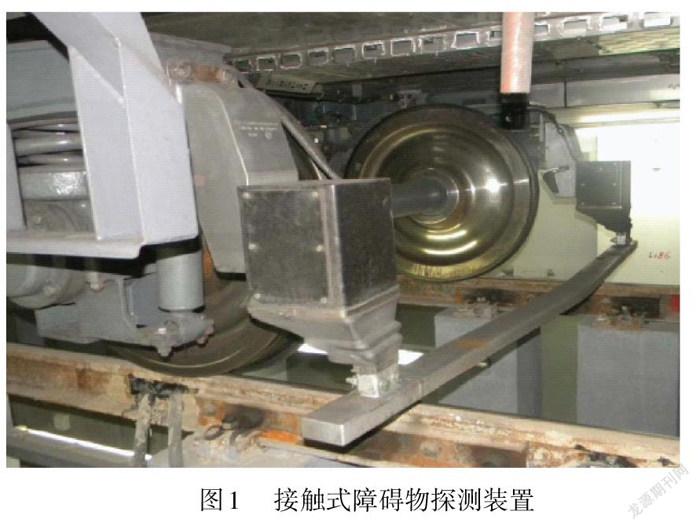
车辆前端和末尾配备障碍物探测装置,该配置为全自动运行车辆标准配置。目前该装置主流采用被动式、接触式系统,通过压力敏感装置探测列车两端的障碍物,如图1所示。当探测到障碍物时,列车会立即触发紧急制动,同时信息将实时发送至OCC,由车辆调度采取处置措施。
但该接触式系统仍存在较大局限性,在监控范围、监控及时性等方面仍不能完全替代人工,因此目前集成雷达、激光、红外等综合探测手段的非接触式系统仍在持续开发,各家地铁也在积极调研非接触式系统发展情况,并在设计阶段充分考虑、预留非接触式系统的条件。
2.2 监控乘客上下车
该功能在车辆专业主要考虑车门故障情况的应对,主要涉及车门状态丢失、车门故障隔离站台门、再关车门控制3种场景。
2.2.1 车门状态丢失
列车运行在线路任意位置,车辆采集到列车车门状态丢失时,车载VOBC将状态丢失信息发送至OCC,并联动VMS。场景情况为:(1)在区间或进站过程中检测到列车车门状态丢失,列车继续运行进站精确停车,列车在站台停稳后,打开车门和站台门后不关闭,待车辆调度、乘客调度根据故障信息、CCTV监控情况或与车站人员沟通核实情况后后再执行后续处理;(2)列车在站台准备启动出站时,采集到车门状态丢失时,车载TCMS立即实施紧急制动。
2.2.2车门/站台门故障对位隔离
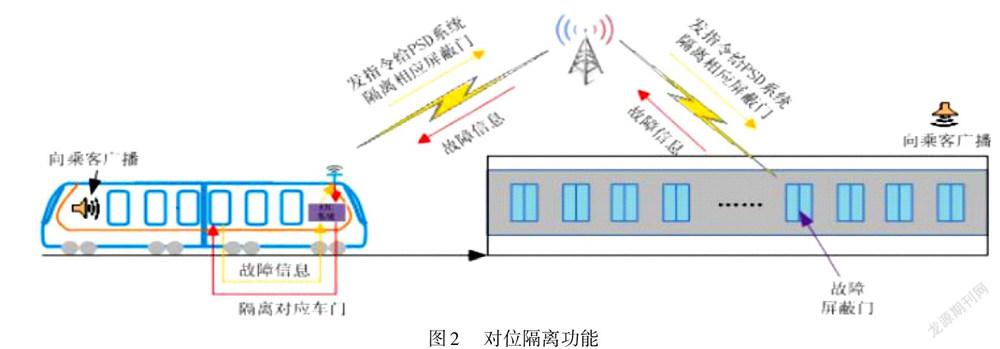
即车门与站台门故障对位锁定功能。当列车个别/多个车门故障隔离后,本列车停站时对应站台门应能保持锁闭不参与停站的开、关门作业。相应地,当列车车门/屏蔽门故障隔离或切除后,本列车继续运行至前方车站停站时对应的站台门应白动隔离,保持锁闭不参与列车停站的开、关门作业。同时,其他站台门的开、关作业不受影响。
场景情况为:(1)当车门故障并隔离或切除后,联动车载PIS,触发故障车门上方的显示屏,提示此门不打开,红色指示灯亮起,并对故障车门进行列车广播;(2)列车TCMS将车门故障信息发送给车载VOBC,VOBC反馈到中心ATS系统,并在行调、车辆调ATS工作站显示车门故障报警信息;(3)列车进出站时车载VOBC与CI联动,确保对位隔离功能的实现。如图2所示。
2.2.3 再关车门控制
当车门因夹人夹物或其他因素导致开闭车门3次后仍不能关闭时,列车通过车辆TCMS向车载VOBC发送进入防夹状态信息,并联动VMS,车门保持打开不关闭,OCC远程通过站台、车内摄像头确认或联系车站T作人员现场确认安全后,远程再执行关闭车门指令或由车站人员按压站台上的强制关门按钮进行关门。
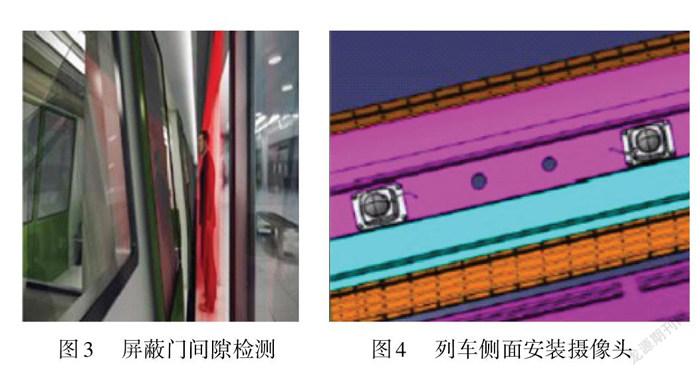
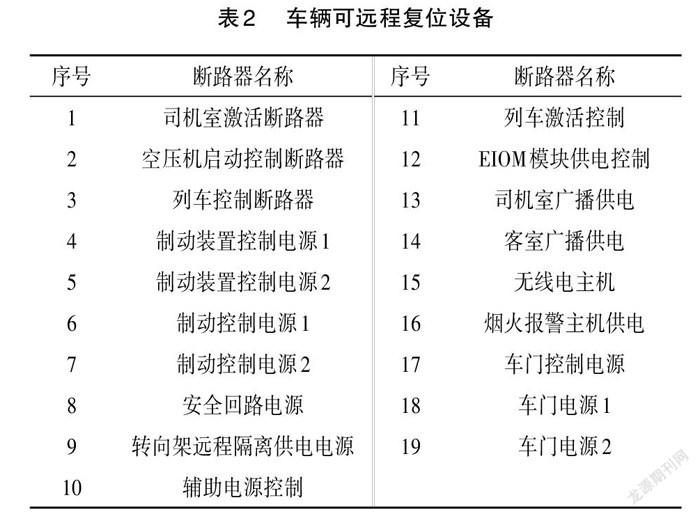
此外,在监控乘客上下车功能上,有的城市应用屏蔽门障碍物检测系统,该系统主要采用红外、雷达或摄像头技术,如图3所示;也有地铁在列车侧面安装一定数量摄像头用于监视车门和站台门之间异物、人员的情况,摄像头具备图像识别功能,如图4所示。
2.3 列车运行
该功能在车辆专业主要考虑以下3点。
(1)车辆应支持远程及本地休眠唤醒功能。
(2)列车在唤醒时,应与信号配合共同完成上电自 检、静态测试,并宜完成动态测试。
(3)车辆休眠时,应具备蓄电池状态上传到控制中心功能;当发生蓄电池欠压,应向OCC报警提示。列车唤醒模块所需的电源应保持24h不间断供电,列车连续休眠一定天数后,仍能确保唤醒列车,并保证一定的额外冗余容量。
2.4 紧急情况的检测与处理
该功能在车辆专业主要考虑以下7点。
(1)配备脱轨检测装置,该装置通常与障碍物检测合设。
(2)每辆车客室内配置客室紧急操作、呼叫装置,如图5-6所示,当客室内发生火灾等特殊情况时,乘客可利用该装置触发报警,TCMS处置报警信息且上传到控制中心,同时联动车载VMS并上传到OCC,乘客调度可远程通过与乘客沟通。
(3)车辆实时监督车辆相关设备的工作状态,对车辆制动系统故障、障碍物检测激活、客室紧急手柄激活、车门状态丢失、车辆火灾等影响列车运行安全的情况进行防护,TCMS处置事件信息并上传到OCC;系统自動处理或由控制中心远程人工处理,并联动车载VMS、车载PIS系统,并向乘客广播。
(4)对电气柜门、司机台盖板、紧急疏散门盖板、灭火器等可由列车TCMS监控,当车辆在运行中电气柜门或盖板打开时,向TCMS和OCC传输报警,联动VMS,并在司机台及OCC的屏上显示。
(5)支持远程复位设备、远程旁路故障功能;根据轨交协发布的《中国城市轨道交通全自动运行系统技术指南(试行)》建议可远程复位设备如表2所示。
(6)具备转向架制动远程切除、停放制动远程操作功能,并设置安全措施,保证全列车紧急制动满足可保证的紧急制动率。
(7)具备受流装置远程操作功能,可实现全列或分组进行受流装置的操作,TCMS处置相关故障信息且上传到OCC。
3 佛山地铁车辆智能运维主要配置分析
与传统运维模式相比,智能运维系统在保障城市轨道交通安全可靠运营的基础上能够最大限度地降低运维成本,符合环境可持续发展的战略要求[8]。国内城市轨道交通企业在探索智能化维保策略的过程中已取得一些成果(如优化修程、拉长计划性维修的时间间隔),但大多数公司仍以试点测试为主,尚未形成批量化的实际应用案例[9]。佛山地铁考虑因应全自动运行模式特点及需要,批量化应用智能运维。
佛山地铁车辆智能运维配置主要基于两点考虑:(1)针对上述全自动基本功能,通过实时监测重点设备状态、长期大数据统计分析,实现故障预测、故障提前介入,形成专家库系统等目标,以提高设备可靠性、安全性;(2)结合全自动运行,通过对设备全寿命周期的监测,部分检查及测量工作的机器补充、替代等方式,降低运维成本。
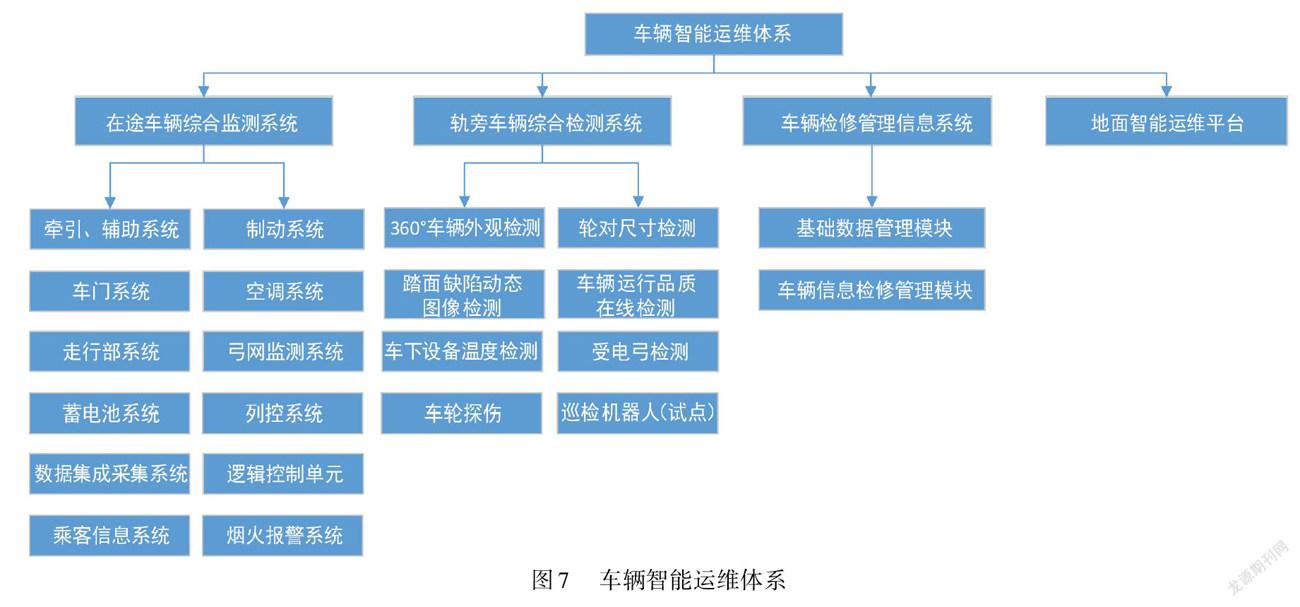
佛山地铁车辆智能运维体系如图7所示,主要考虑如下。
(1)在途车辆综合检测系统。主要包括:①各子系统的检测,主要基于系统原有诊断功能,部分加装传感器,集成在运维平台对其关键数据进行统计分析;②走行部系统、弓网监测系统、蓄电池检测系统,为安全重要设备监测系统,是对全自动运行的重要补充,且相关监测系统在行业内应用较广泛、成熟,建议全自动运行线路列车可全覆盖配置;③数据集成采集系统,功能为对各子系统监测数据进行集成采集,并进行故障前期诊断。
(2)轨旁车辆综合检测系统。主要包括:①360°车辆外观检测、轮对尺寸检测、踏面缺陷动态图像检测、巡检机器人(试点)可作为人工作业的补充,是降低运维成本的主要手段;②车辆运行品质在线检测、车下设备温度检测、受电弓检测、车轮探伤等设备,对列车运行状态进行监测,保障列车动力学性能、车下设备温度、受电弓、轮对状态正常。其中,巡检机器人目前仍处摸索阶段,技术仍不成熟,可作为试点,并在设计阶段预留供电条件。
(3)车辆检修管理信息系统。与地铁公司自身生产运作系统管理系统应做好功能区分,生产运作系统管理系统主要侧重于物资、资产、工单、工器具,并兼有数据库功能;车辆检修管理信息系统则偏重于车辆自身个性化需求,如洗车安排、受电弓检查安排、普查整改模块、技术通知单模块、架大修模块等。
(4)地面智能运维平台。通过对在途车辆综合检测系统、轨旁车辆综合检测系统、车辆检修管理信息系统输入的数据进一步实现车辆状态监控、故障报警、应急处置、故障诊断、故障预警、故障预测、运维决策支持、RAMS分析、LCC分析等功能。地面智能运维平台整合并使各子检测系统数据实现互联,并利用大数据、数据中台等手段进行数据挖掘,从而实现车辆状态及数据的统一展示、分析、决策。智能运维不能单一地追求高技术含量,还要兼顾先进性和成熟度,以信息化为基础,强化顶层设计,梳理系统架构,合理搭建系统平台[10]。此外,在其他全自动运行线路,也有试点构架失稳监测、车体平稳性监控、限界巡检等监测设备。
4 结束语
佛山地铁在车辆全白动运行、智能运维方面进行了积极探索,结合相关技术资料分析了车辆全自动运行模式下的主要配置,并以此作为主要依据,即结合全自动运行需求、特点,提出了车辆智能运维设备配置的建议。在项目的规划阶段创新统筹考虑车辆全白动运行与智能运维的关系,以此作为相关设备的配置依据。通过全自动运行及智能运维系统的建设,提高车辆的整体安全性、可靠性,实现车辆检修的智能化、车辆全生命周期的管理,降低维护成本。未来佛山地铁将紧跟相关技术发展情况,进一步优化车辆相关设备配置,优化车辆维修体系、管理体系。
综上,总结及展望如下。
(1)全自动运行模式下智能运维系统相辅相成,密不可分。除全自动运行标配的障碍物检测系统外,在行业规范内,走行部在线监测、受电弓在线监测、蓄电池在线监测等设备也被建议在全白动运行线路的车辆上配置。可以预见,随着设备的成熟,相关设备在未来将会进一步纳入全白动运行标配范围。
(2)密切关注非接触式障碍物检测系统、车车通信、WiFi6、限界巡检、数据中台等技术发展。全自动运行及智能运维作为行业发展方向,随着基础技术的发展,相关技术必有更长远的发展,因此须紧跟新技术发展,进一步完善相关设备配置体系。
(3)结合既有线路相关智能运维设备安装、调试、运用情况,为全面推广相关重点在线监测做好准备。通过全面引入在线监测分析系统,对转向架、受电弓、牵引辅助、车门等影响行车的关键设备进行全生命周期管理,提升运营设备安全性、可靠性。
(4)因应全自动运行及智能运维带来的检修模式、人员体系变化,需及早谋划。在全自动运行及智能运维模式下,对检修人员的传统检修能力要求有所弱化,但对智能设备应用维护、软件数据分析等要求有所提高。此外,检修人员还需承担部分正线保障职能。
(5)基于车辆智能运维系统进行设备状态修的探索。随着设备智能运维技术的发展,在大数据中心的支持下,可对设备运行状态进行实时监控、故障预测与设备劣化趋势判断,进而实现设备在线实时故障诊断、运用状态全面分析、劣化设备提前预警[11]。
(6)数据云平台的应用。佛山地铁云平台建设除管理领域外,也规划涉及生产领域、智能运维领域,旨在解决各专业数据孤岛问题。但在如何使数据相互联动、共同分析决策等方面仍需进一步研究。
(7)结合智能运维设备,提前谋划全自动运行场景设计。场景文件既需要体现运营的理念与需求,又需要反映出系统中的各设备功能和岗位设置的依据以及系统之间联动的逻辑[12]。全自动运行场景除全自动运行行业规范常规的40多个场景外,各大地铁公司因应自身公司架构、人员、管理体系等不同,细化、补充了部分场景,因此有必要结合实际情况,充分考虑所配置的智能运维设备的定位、作用,对场景进行优化、完善。
参考文献:
[1]郜春海,王伟,李凯,等.全自动运行系统发展趋势及建议[J].都市快轨交通,2018(1):51-57.
[2]王伟.面向互联互通的全自动运行系统[J].铁路技术创新,2016(4):56-60.
[3]闰宏伟,燕飞,城市轨道交通全自动运行系统及安全需求[J].都市快轨交通。2017,30(3):50-55.
[4]张黎璋.东莞地铁设备智能运维系统分析[J].城市轨道交通研究,2019(9):160-167.
[5] IEC-62290-1-2006. Urban Cuided Transport Management andCommand/control Systems Part l:System Principles and Fun-da-mental Concepts[S].
[6]李岗.地铁车辆智能检修可行性研究[J].山东工业技术,2018(9):60.
[7] IEC-62267: 2009. Automated Urban Cuided Transport(AUGDSafetyRequirements[S].
[8]劉述芳.城市轨道交通关键设备智能运维系统初步建构[J].设备管理与维修,2018(增刊1):22.
[9]刘丙林,朱佳,李翔宇.城市轨道交通车辆智能运维系统探索与研究[J].现代城市轨道交通,2019(6):16-21.
[10]胡佳琦,上海市轨道交通车辆智能运维系统研究与应用[J].现代城市轨道交通,2019 (7): 5-9.
[11]陈建.基于故障预测与健康管理的高铁信号设备维护技术研究[J]中国铁路,2015(3): 16.
[12]谭文举,杨卫峰,廖云,等.城市轨道交通全自动运行系统设计及场景分析[J].机车电传动。2019(4):112-115.
