商用车侧翻的灰色-马尔科夫链预测方法研究*
2022-04-08辜志强王朝阳
辜志强 王朝阳
(武汉理工大学,武汉 430070)
主题词:气压制动时延 灰色模型 马尔科夫链理论 硬件在环
1 前言
重型商用车辆尺寸和质量较大、质心较高,侧翻稳定性较差,特别是在高速、大转向和紧急避障等工况下,其发生侧翻的概率显著上升。因此,侧翻预警技术的研究非常必要。
目前,在简单算法框架下实现较为精确的侧翻预警效果是学者们的研究重点。宗长富等针对以往研究中总是采用固定横向载荷转移率(Lateral-load Transfer Rate,LTR)阈值衡量是否启动制动系统的局限性,提出建立动态LTR 阈值库来匹配不同簧载质量、行车速度和转向盘转角的情况。金智林等以SUV 为研究对象,提出一种动态预警算法,但在算法中加入了与驾驶员反应速度相关的物理量,难以具体量化和应用。Mar 等提出了一种新的车辆侧翻指数,但它是静态的,无法适用于多场景下的侧翻预警需求。赵又群等考虑了驾驶员转向盘输入的变化情况,更加贴近真实驾驶状况,但最终建立的模型会造成一定程度的超调。曾小华等将遗传算法和神经网络相结合运用到预警策略中,仿真结果良好,但算法框架过于复杂。陈毅华等提出了将车辆侧倾角作为侧翻时间(Time To Rollover,TTR)预警的依据,但仿真过少,且选取的模型参数与具体车辆紧密相关,不具普遍性。文献[8]、文献[9]建立了结合道路识别的车辆防侧翻系统。田顺等采用弱化缓冲因子对GM(1,1)模型进行改进,以适用于全速度和复杂工况,但没有补偿气压制动系统的时延。张志勇等采用灰色GM(1,1)模型对LTR 进行预测,以实现对一般控制信号的时滞性进行一定的补偿,但预测精度和预测时域需进一步提高。
在以上研究中,对于车辆侧翻的预测时间大多保持在0.3 s左右,超出0.3 s鲁棒性和预测精度都会降低,但是实际商用车气压制动系统的气压建立时延平均为0.6 s左右。针对商用车制动系统的气压建立时延,本文提出一种商用车侧翻的灰色-马尔科夫链预测方法。首先建立LTR估计器作为后续的建模基础,然后针对灰色模型预测精度不高的问题,引入马尔科夫链模型进一步优化,最后将应用层算法与硬件驱动代码下载至ECU 中进行硬件在环(Hardware-In-the-Loop,HIL)试验,观察预警效果是否达到预期。
2 商用车侧翻的LTR估计器
由于LTR 具有普遍性,可用于任何车辆的侧翻现象,故本文将LTR作为预测目标:

式中,为LTR的计算值;、分别为左、右侧车轮载荷。
由于在车轮两侧获取和所用的传感器成本较高,故本文依据商用车的动力学模型建立LTR估计器来近似求解。图1所示为商用车的动力学模型,其中:F、F分别为左、右前轮所受的侧向力;为前轮转角;F、F分别为左、右后轮所受的侧向力;为横摆角速度;为轮距;为车身侧倾角;为簧载质量重心与侧倾重心的距离;为簧下质量重心高度;为簧载质量;为重力加速度;F、F分别为左、右侧车轮所受的垂向力。

图1 商用车动力学模型
车辆横向、侧倾和垂向的运动微分方程分别为:



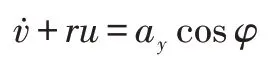


本文选取二轴客车作为具体的研究对象,其参数如表1所示。
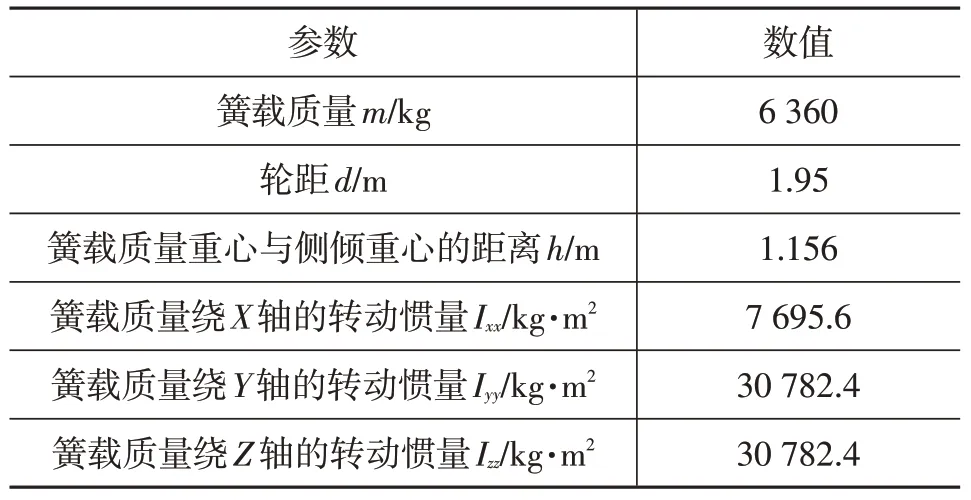
表1 二轴客车模型部分参数
为了验证上述估计器的准确性,本文将LTR估计器嵌入TruckSim 和Simulink 的实时环境。验证工况采用双移线工况,如图2 所示,并设置车辆以100 km/h 恒速运行。TruckSim 与MATLAB/Simulink 的联合仿真平台如图3所示。
图2 双移线工况设置
图3 中,TruckSim 不断对外输出车辆左、右车轮的对地载荷,用于计算车辆真实的LTR 值,子系统1 封装了式(6)的LTR 估算方法,后接示波器验证LTR 的估算效果,估计值与实际值对比结果如图4所示。

图3 LTR估计器的TruckSim-Simulink联合仿真平台
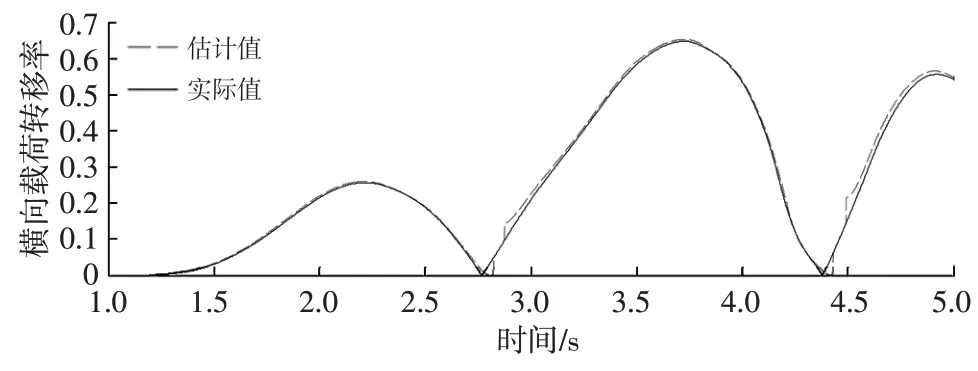
图4 双移线工况下的LTR估计值与实际值对比
由图4可知,LTR估计器模型的估计值与车辆实际的LTR 值平均误差仅为0.015,表明所设计的LTR 估计器有效。
3 商用车侧翻的灰色-马尔科夫链预测模型
3.1 灰色GM(1,1)模型的建立
灰色模型具有预测所需原始数据量小,预测精度高等特征。算法主要步骤如下:
a.采集进行灰色预测所需要的原始数据序列:

式中,(),=1,2,⋅⋅⋅,为灰色预测模型的输入。
b.对采集到的维原始数据进行一次累加,以使数据呈现一定的规律性:

其中:

c.利用一阶微分建立白化方程(也称时间响应函数):

式中,为发展系数;u为灰色作用量。
求解该时间响应函数得到时间响应序列为:

式中,(+1)为采样时刻为(+1)时的估计值;为迭代求解次数。
d.将式(11)得到的估计值组成估计值序列:

至此,再将序列进行一次累减即可求得原始序列的估计值。
3.2 灰色预测模型验证与精度分析
为验证预测模型的正确性以及定量分析其预测精度,特将灰色模型算法封装为Level1-S函数嵌入TruckSim和MATLAB/Simulink联合仿真平台,如图5所示。验证工况采用J-Turn 工况,如图6 所示,车辆以100 km/h 恒速行驶,路面附着系数为0.85。假设当前运行时刻为,预测时间为,联合仿真平台的基采样速率为,原始数据序列数量为,则迭代求解次数=/+。分别取预测时间为0.1 s、0.4 s和0.6 s进行共计3组仿真测试,结果如图7所示。其中LTR预测结果存在大于1的情况,这是灰色预测模型算法随着提前预测时间的增大丧失了鲁棒性,产生预测数据失真造成的。侧翻危险点处,即LTR估计值曲线最高点(=3.2 s)的误差统计结果如表2所示。
凡此种种,尤其从2015年到现在,每一想起诸如此类的事情,莫名惊诧之外,还有巨大的空茫感与不确定性。我知道,这不是所谓的迷信,尤其是我们或可感知的冥冥中的律定与指派,游离与消失,它们所具备的那种类似被神明操纵的玄学意味,常常使得人心生感慨。
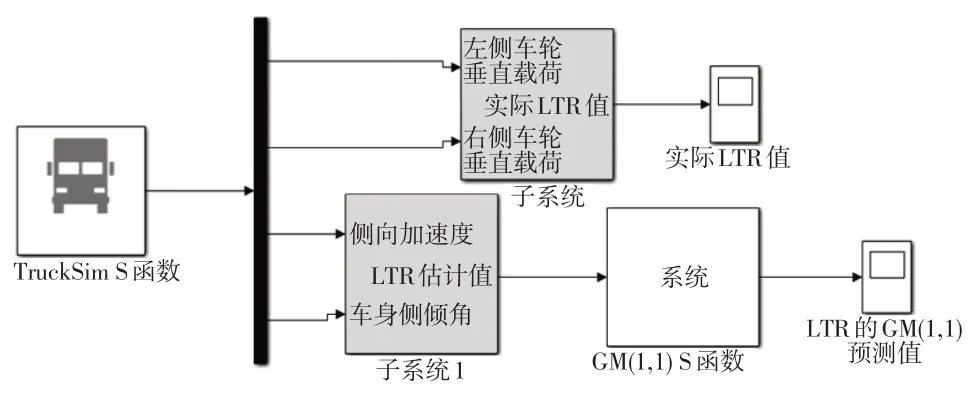
图5 灰色模型算法仿真验证平台
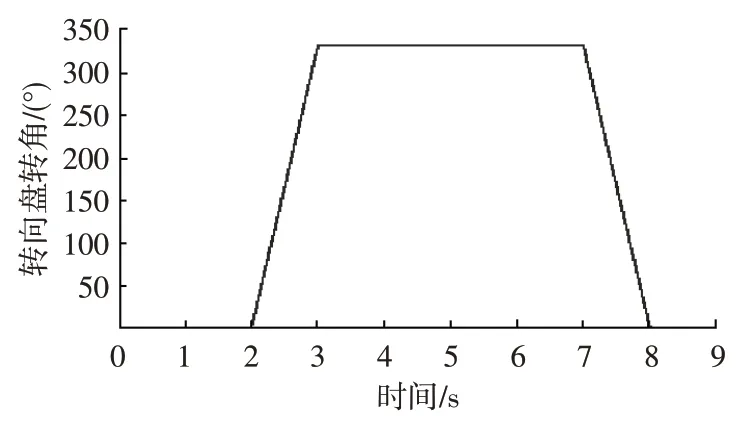
图6 J-Turn工况设置
由图7 可以看出:随着预测时间变大,灰色模型的误差也逐渐变大;预测时间为0.1 s和0.4 s时,基本可以有效跟踪实际LTR 曲线,且误差大小可接受,但预测时间为0.6 s 时已经发生畸变,在运行时间为第2.0~2.5 s的区间内,预测数据已经产生极大的跳变;在侧翻危险点的邻近区域内,LTR预测曲线偏离LTR估计值曲线的程度最大,会造成防侧翻控制系统频繁启动的情况。由表2可以看出,在侧翻危险点处,预测时间为0.6 s时,误差已经达20.78%。显然,采用灰色模型无法满足预警系统的设计需要。


图7 不同预测时间下LTR预测曲线

表2 侧翻危险点处不同预测时间下的预测误差
3.3 灰色-马尔科夫链预测方法
马尔科夫链模型是根据状态之间的转移概率来推测系统未来发展变化的,其转移概率反映了各种随机因素的影响程度,因而马尔科夫链模型适合大时间跨度类的数据预测问题,恰好可以弥补灰色预测模型的局限性。
马尔科夫链优化模型的主要步骤如下:
a.建立GM(1,1)模型。同3.1节。
b.状态划分。根据灰色预测结果和真实值的残差幅度变化,将数据划分为若干不同的状态,并用,,…,Q表示。
d.计算预测值。设为初始时刻的状态概率向量,则第时刻的状态概率向量=,通过状态概率向量即可计算出预测时刻的LTR值。
3.4 灰色-马尔科夫链预测方法精度分析
应用马尔科夫链理论最关键的问题是如何选取基于残差划分的状态数量,这将直接影响算法的具体结构和预测精度。本文首先猜想:基于残差划分的状态数量越多,预测结果越精确。为了验证该猜想并为今后研究者提供设计马尔科夫链算法的理论依据,本文在预测时间为0.6 s 的条件下进行了3 组不同状态数量的测试来观察最终预测结果。设残差为LTR 灰色预测值与估计值之差,将测试1 的状态区间长度设为=/7,则测试1 基于残差划分的状态数量有7 个:,[-7,-5);,[-5,-3);,[-3,-);,[-,);,[,3);,[3,5);,[5,7]。
测试2、测试3 的状态区间长度分别设为=/9、=/11,具体状态区间段同测试1类似。为探究不同状态划分数量对预测结果的影响,仿真测试延续前文的JTurn工况,车辆参数配置保持不变。联合仿真验证平台如图8所示,仿真结果如图9所示。此外,为验证算法在绝大多数侧翻工况下的精确度和鲁棒性表现,而J-Turn工况、蛇形工况和双移线工况作为典型的车辆侧翻工况,能够涵盖车辆在非绊倒型侧翻工况下的大部分状态,故在前述J-Turn工况下,加入蛇形工况和双移线工况进行算法的普适性验证,工况具体设置如图10、图11所示,车速配置恒定为100 km/h,仿真结果如图12和图13所示。

图8 灰色-马尔科夫链模型预测联合仿真平台
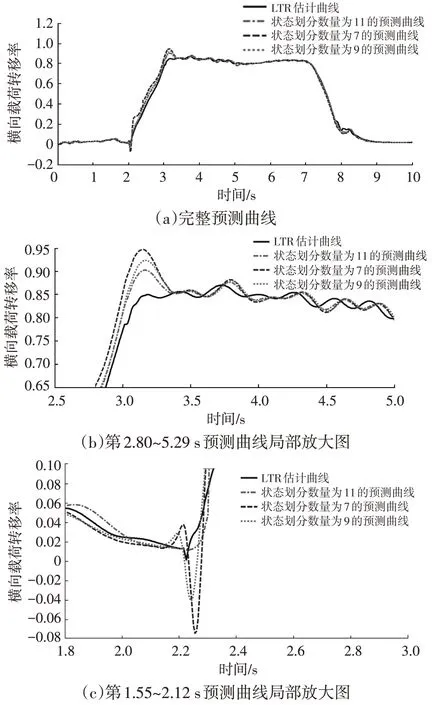
图9 不同状态数量下的灰色-马尔科夫链LTR预测曲线

图10 双移线工况
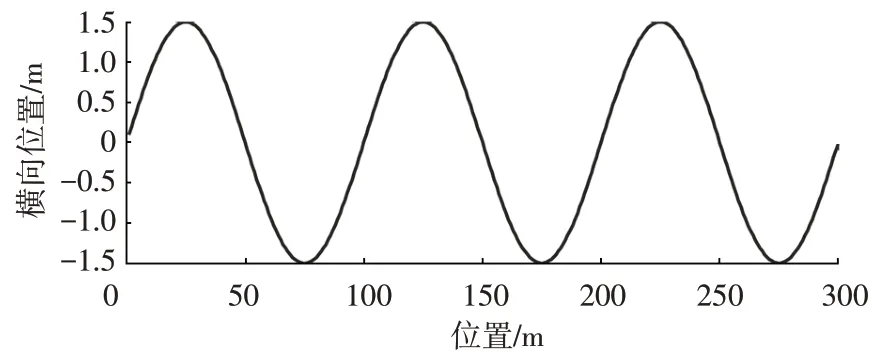
图11 蛇形工况
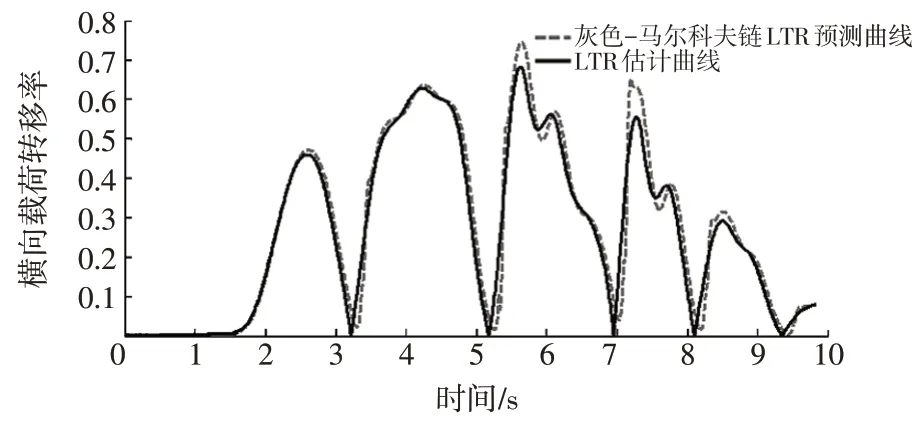
图12 双移线工况下灰色-马尔科夫链LTR预测曲线

图13 蛇形工况下灰色-马尔科夫链LTR预测曲线
由图9a可以看出,在预测时间为0.6 s时,基于残差划分的状态数量的不同并没有产生大幅度偏离LTR 估计值曲线的情况,比3.2节单独使用灰色模型的预测精度高了很多,并且没有发生大幅度的数据跳变。由图9b 可以看出,在预测时间为0.6 s 时,不论哪种状态数量,采用马尔科夫链模型优化后的LTR 预测值和LTR估计值的误差最大已经降低至0.1左右,比3.2节中单独使用灰色预测产生的最大误差小得多,并且跟踪响应性好。在侧翻危险点处,残差划分得越细致,状态数量越多,灰色-马尔科夫链的预测曲线越贴合LTR 估计曲线。由图9c可以看出,虽然状态数量少,但在某些时刻依然会有数据跳变的趋势,状态划分数量为11 个时的数据曲线最平滑。
在实际应用中,并不是状态数量越多越好,状态数量多也意味着在实际C 程序中会产生大维度的矩阵运算,所以需要寻求芯片随机存取存储器(Random Access Memory,RAM)资源和实际预测精度的折中平衡。由于本文用到的测试ECU 的外扩RAM 资源比较丰富,本次算法采用的状态区间长度为=/9。
由图12 和图13 可以看出,在双移线工况和蛇形工况下,灰色-马尔科夫链算法均保持着较高的预测精度。其中,蛇形工况下的预测精度最高,预测曲线与实际曲线几乎紧密贴合,而双移线工况下,尽管在某些时刻出现了一定程度的偏离,但是侧翻危险点处误差维持在0.063,只需在设置ECU 中的侧翻预警阈值时进行一定的误差补偿即可。
4 商用车侧翻的灰色-马尔科夫链预测方法的HIL试验验证
4.1 IPG/TruckMaker硬件在环试验平台
本文试验平台包括上位机软件TruckMaker/MATLAB/Simulink,下位机Xpack4 板卡机箱,3.3 V 转5 V 双向IO 电压转换板以及待测ECU(主控芯片为STC8A8K64SA12),试验台如图14 所示,其电子电气连接如图15 所示。其中灰色-马尔科夫链侧翻预测算法采用C 语言编写和底层驱动集成并整体编译下载到ECU中。ECU通过下位机Xpack4的M27板卡进行车辆状态数据接收,以此作为上层预测算法的输入,一旦检测到未来预测域LTR 值大于LTR 阈值,则ECU 立即输出高电平反馈给TruckMaker 的控制面板(IPG Control)进行侧翻预警。

图14 IPG硬件在环试验台
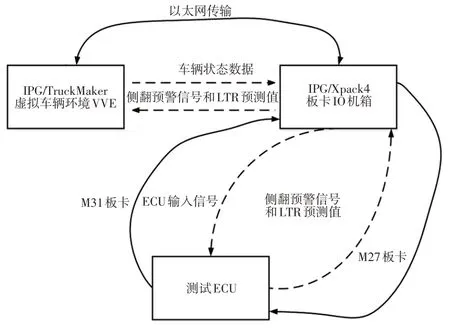
图15 HIL测试的电子电气连接示意
4.2 灰色-马尔科夫链预测方法验证
HIL 试验选取的车辆工况同第3 章,即路面附着系数为0.85,运行车速为100 km/h,转向盘转角为330°,为避免车辆起动时随机因素对输入信号的干扰,J-Turn工况从第2 s开始,选取TruckMaker中自带的客车(Coach)模型。假设控制系统以LTR为0.75作为控制门限值,即LTR 估计值达到0.75 时,车辆防侧翻控制系统开始工作。为了补偿第3章灰色-马尔科夫链预测算法预测结果0.054的误差,本次试验将ECU的预警LTR阈值设置为0.804 0。
在车辆实际的侧翻预警中,首次预警时刻至关重要,因为第1 次预警发生时,控制器便会启动相应的制动控制策略,所以后期LTR 曲线会趋于平缓,降至安全区域。故只关注0~4 s范围内ECU的预警效果即可,图16所示为HIL试验结果。

图16 HIL试验结果
防侧翻控制系统预期启动时刻为3.055 s,该采样时刻下的LTR 估计值为0.751 1,此时第1 次越过阈值0.75。第3.1 s的LTR预测值达到0.804 4,此时第1次越过阈值0.804 0,但ECU 内部的预警算法以0.6 s 作为预测目标,即ECU输出预警高电平的时刻是第2.5 s,故实际上ECU 提前0.555 s 实现了预警功能,说明本文所设计的灰色-马尔科夫链预测方法是有效的。
5 结束语
本文提出一种商用车侧翻的灰色-马尔科夫链预测方法,并结合仿真测试和IPG/TruckMaker的硬件在环测试进行验证,得到如下结论:
a.灰色模型的预测精度在预测时间为0.4 s 左右时满足系统需要,但对于补偿气压制动系统的气压建立时延是远远不够的,在预测时间为0.6 s 时已经发生了预测数据的跳变。
b.引入马尔科夫链理论可以有效抑制灰色模型的输出在某些采样点的数据跳变,保持数据的增减趋势,并且灰色-马尔科夫链模型的预测精度与基于残差划分的状态数量有关,状态数量越多,LTR 预测曲线越平滑、精度越高。
c.在硬件在环的试验中,ECU实现了提前车辆侧翻0.555 s 将预警高电平信号输出,表明本文提出的商用车侧翻的灰色马尔科夫链预测方法适用于商用车侧翻预警系统。
