驱动转向复合工况分布式驱动稳定控制开发与验证
2022-04-08王德平崔金龙杨钫于长虹周泽慧
王德平 崔金龙 杨钫 于长虹 周泽慧
(1.中国第一汽车股份有限公司 研发总院,长春 130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130013)
主题词:分布式驱动 驱动转向 稳定控制 横摆控制 驱动防滑控制
1 前言
分布式驱动电动汽车具有车轮扭矩独立可控的优势,能够提升车辆的操纵稳定性能。目前,分布式驱动控制的研究热点包括横摆控制和驱动防滑控制等。横摆控制技术大多以横摆角速度、质心侧偏角等为控制目标,通过PID控制、模型预测控制等实现目标跟踪,以提升车辆操纵稳定性。驱动防滑控制以滑转率、加速度等为控制目标,通过PID 控制、滑模控制等方式实现车辆牵引性和稳定性提升。在实际弯道加速行驶工况中,会出现横摆控制和驱动防滑控制同时作用的工况,如何协调两种控制方案,兼顾车辆纵向驱动牵引性和侧向操纵稳定性,是目前分布式驱动稳定控制的难点。一些研究者提出了优先级策略,驱动防滑控制优先级高于横摆控制,能够保证车辆的牵引性,但无法保证其横向稳定性。一些研究者提出了利用模型预测控制原理设定纵向、侧向控制目标,通过模型预测控制实现目标跟踪,但是该方案对车辆状态信号(如车速、侧偏角、路面附着系数等)要求较高,且对控制器算力要求高,目前难以推广应用。
本文提出一种兼顾车辆纵向牵引性和侧向操纵稳定性的复合工况分布式驱动稳定控制策略。在低速稳定行驶工况和弯道加速行驶工况,驱动防滑控制和横摆控制分别具有更高的优先级。同时通过车辆转向稳定状态识别适时调节目标滑转率,确保车辆稳定转向行驶和轨迹跟随能力。
2 分布式驱动电动汽车研究对象
本文采用的分布式驱动电动汽车如图1 所示,由4个轮毂电机驱动车轮,可以实现全轮独立驱动,单个车轮的电机驱动、再生制动扭矩由整车控制器(Vehicle Control Unit,VCU)直接控制。图2 所示为该车辆动力系统架构,包括VCU、动力电池及电池管理系统(Battery Management System,BMS)和4个轮毂电机及电机控制器(Motor Control Unit,MCU)。整车装备了转向盘转角传感器和横摆组合传感器以获得车辆转向盘转角、车身横摆角速度、纵向加速度和侧向加速度等信息。4 个车轮轮速由MCU 测得。该车辆的主要参数如表1所示。

表1 车辆主要参数

图1 分布式驱动电动汽车
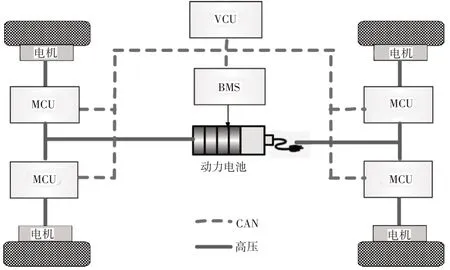
图2 分布式驱动电动汽车动力系统
VCU 结合油门开度和轮速等信号计算需求扭矩,根据车辆行驶状态对需求扭矩进行分配,得到4个轮毂电机的目标扭矩,并将目标扭矩控制指令发送给MCU,以实现分布式驱动稳定控制。
3 分布式驱动稳定控制
3.1 控制架构
在驱动转向复合工况下,分布式驱动稳定控制的设计目标为:
a.横摆控制功能确保车辆具有低不足转向特性和良好的操纵稳定性;
b.驱动防滑控制功能确保车辆的牵引性和稳定性;
c.在纵滑、侧滑同时发生时,低速工况下以车辆牵引性提升为主、操纵稳定性提升为辅,中高速工况下以车辆操纵稳定性提升为主、牵引性提升为辅。
根据上述设计目标,设计控制架构如图3所示。

图3 分布式驱动稳定控制架构
3.2 状态估计
3.2.1 路面附着系数估计
根据车辆纵向、侧向加速度传感器测量信息计算整车利用附着系数:

式中,a、a分别为传感器测得的车辆纵向、侧向加速度;为重力加速度。
当ABS 功能触发,或车轮出现严重滑转,或车辆处于严重不足/过度转向状态时,认为车辆处于不稳定状态,结合车辆的稳定状态估算路面附着系数:

式中,、分别为时刻路面附着系数和利用附着系数。
3.2.2 纵向车速估计
通过车辆运动学原理将四轮轮速信号转化为后轴中点速度,以降低前轮侧偏对车速估计的影响;再根据最小轮速法和斜率限制法估算车辆后轴中点纵向车速v。
结合车辆运动学原理和后轴中心纵向车速估计结果,计算转向工况下4个轮心的速度:
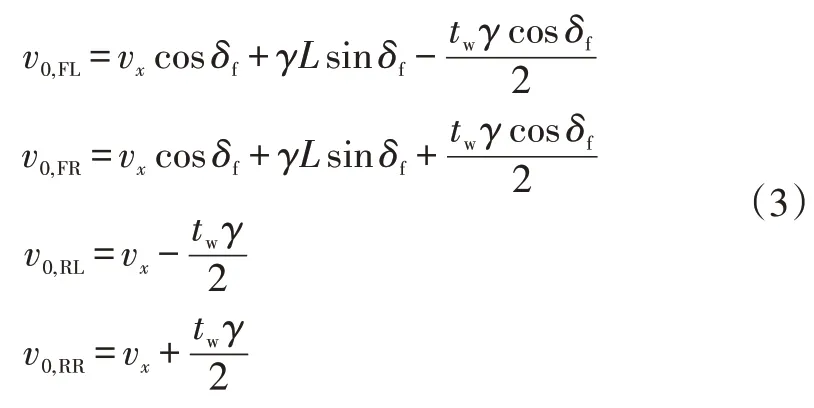
式中,、、、分别为左前轮、右前轮、左后轮、右后轮的轮心速度;为前轮转角;为传感器测得的车辆横摆角速度;为轴距;为轮距。
3.2.3 侧偏角估计
整车二自由度运动微分方程为:

式中,、分别为前、后轮侧偏刚度;v为侧向车速;、分别为车辆质心到前、后轴的距离;为整车质量。
根据式(4),采用离散方式计算侧向车速:

式中,Δ为采样时间。
根据纵、侧向车速估计结果计算质心侧偏角:

根据质心侧偏角计算车辆后轮侧偏角:

3.3 横摆控制
通过横摆角速度和侧偏角跟踪控制,可实现横摆控制功能。本文根据二自由度模型计算目标操纵横摆角速度:

式中,为稳定性因数。
根据路面附着系数估计值对目标操纵横摆角速度进行合理限制,得到目标横摆角速度:

后轮目标侧偏角为:

式中,为后轮侧偏角门限值。
结合横摆角速度和后轮侧偏角跟踪控制目标,采用比例反馈控制,计算附加横摆需求扭矩ΔM:

式中,、分别为横摆角速度、后轮侧偏角比例反馈控制参数。
结合车辆转向稳定状态、横摆需求扭矩和驾驶员期望扭矩计算车轮扭矩分配结果。当车辆识别为不足转向时,应更多利用后轴驱动轮实现横摆控制,以改善车辆不足转向;当车辆识别为过多转向时,应更多利用前轴实现横摆控制,以改善车辆过多转向:
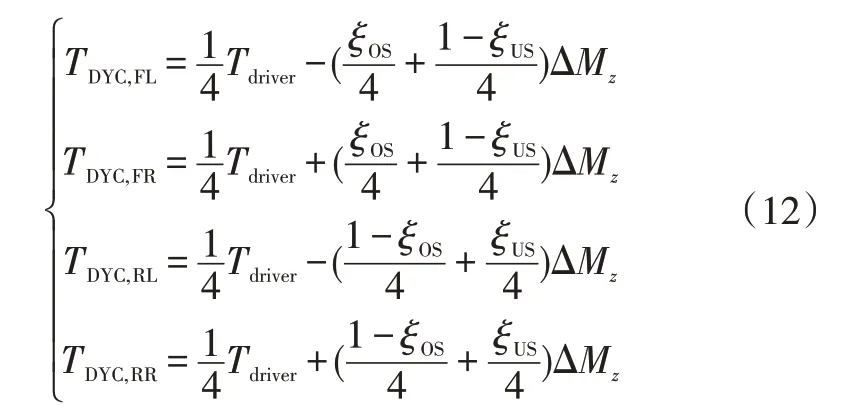
式中,、、、分别为横摆控制模块左前轮、右前轮、左后轮、右后轮期望扭矩;为驾驶员需求扭矩;、分别为不足转向因子和过多转向因子,取值范围均为0~1。
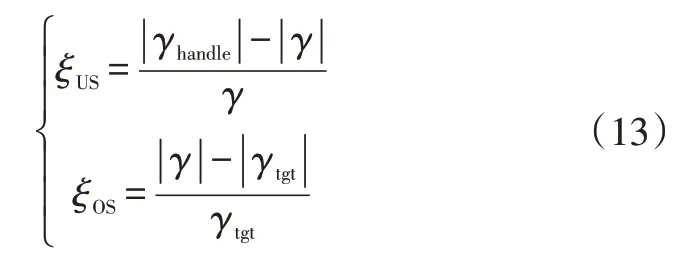
3.4 转向状态识别
根据目标操纵横摆角速度与实际横摆角速度偏差的比值识别车辆不足转向状态,根据目标横摆角速度与实际横摆角速度偏差的比值识别车辆过多转向状态:
3.5 驱动防滑控制
在加速转向工况,车轮纵向驱动力较大或侧向力较大都会影响轮胎侧偏特性,进而导致车辆出现严重不足转向现象,丧失转向能力。此时,根据车辆不足转向状态因子降低车轮目标滑转率,通过驱动防滑控制降低车轮扭矩,使纵向车速和车轮驱动力保持在稳定范围内,从而保证车辆稳定加速转向行驶性能。目标滑转率修正策略为:

式中,为目标滑转率修正值;为严重不足转向状态下目标滑转率;为直线行驶工况下驱动防滑控制目标滑转率。
根据目标滑转率计算目标轮速:

式中,为车轮目标轮速;=F,R分别表示前、后轮;=L,R分别表示左、右轮。
根据驱动防滑控制目标,通过比例积分反馈控制,确保车轮滑转率稳定,实现驱动防滑控制功能。驱动防滑控制输出单轮扭矩为:

式中,、分别为比例、积分反馈控制参数。
3.6 扭矩协调控制
横摆控制模块根据车辆行驶状态计算单轮需求扭矩,以实现横摆控制目标。当横摆控制单轮期望扭矩过大导致车轮滑转时,驱动防滑控制激活,通过降低单轮驱动扭矩控制实现滑转率稳定控制功能,保证车辆行驶稳定性。但驱动防滑控制功能作用后,车辆左、右轮的扭矩差将不能满足横摆控制要求,由此导致车辆改变操稳性能或存在侧向失稳风险。因此,在驱动防滑控制后,需要结合车辆行驶状态及性能需求对4个车轮的驱动扭矩进行协调控制,以实现纵向、侧向稳定兼优控制目标。
横摆控制模块输出的左、右轮扭矩差为:

式中,Δ、Δ分别为横摆控制输出的前、后轴轮间扭矩差。
驱动防滑控制模块输出左、右轮扭矩差为:

式中,Δ、Δ分别为驱动防滑控制输出的前、后轴轮间扭矩差。
扭矩协调控制模块输出的前轴目标扭矩为:

式中,、分别为扭矩协调控制模块输出的左前轮、右前轮目标扭矩;Δ为轮间扭矩差门限。
对于后轴,控制策略同上:

式中,、分别为扭矩协调控制模块输出的左后轮、右后轮目标扭矩。
Δ根据车辆行驶状态进行设定:
a.Δ在低速阶段较大,以降低横摆控制对低速工况驱动防滑控制功能的影响,提升车辆牵引性;
b.Δ随车速升高而降低,随车辆不足/过多转向因子增大而降低,以降低驱动防滑控制对中高速或侧滑工况下横摆稳定控制功能的影响,提升车辆操纵稳定性。
4 仿真测试
本文通过定圆加速转向工况仿真测试对分布式驱动稳定控制功能(横摆控制和驱动防滑控制)进行仿真验证。仿真工况为:在路面附着系数为0.85 的平坦圆形广场上,车辆以10 km/h的车速沿半径为30 m的圆形轨迹匀速行驶10 s,然后缓慢增加驾驶员需求扭矩,使车辆纵向速度以1 km/(h·s)的增长速率缓慢增加,同时驾驶员通过调整转向盘转角使车辆沿半径为30 m的圆形轨迹行驶,直至车辆严重失稳或驾驶员需求扭矩达到扭矩上限并持续一段时间,测试停止。将车辆设置为无控制、横摆控制、驱动防滑、横摆控制和驱动防滑协同控制4 种控制状态,分别进行上述仿真测试,结果如图4所示。
在无控制状态下,在第53 s 前,车辆纵向速度以1 km/(h·s)的固定增长速率缓慢增加,由于车辆具有不足转向特性,转向盘转角随纵向车速的增加而小幅增大(见图4a、图4b)。第53 s 时车辆出现严重转向不足,车辆横摆角速度迅速下降,即使驾驶员快速且大幅增加转向盘转角,车辆依然偏离目标轨迹(见图4c),当车辆加速至第66 s 时发生严重失稳。
车辆在驱动防滑控制作用下,第53 s时出现严重转向不足(见图4b、图4c)。由于驱动防滑控制可调节车轮滑转率在稳定范围内,车辆处于转向不足状态并保持67 km/h稳定车速(见图4a、图4e)。
车辆在横摆控制作用下,由于横摆控制有效改善车辆转向不足现象,在第58 s 才出现转向不足(见图4b、图4c),同时车辆最大侧向加速度相比无横摆控制状态提升0.25 m/s(见图4d),但是由于车速持续增加导致车轮因驱动力过大而出现纵向滑转,车辆在第86 s出现严重失稳(见图4a、图4e)。
车辆在横摆控制和驱动防滑协同控制作用下,在第58 s 前,车辆保持横摆控制效果,有效改善车辆转向不足,提升最大侧向加速度(见图4b、图4c)。在第58 s 时,车辆出现转向不足,根据车辆不足转向状态调整驱动防滑控制目标,降低车轮驱动扭矩和车轮滑转率(见图4f、图4g),使车速稳定控制在52 km/h 并保持半径30 m 的稳定轨迹跟随能力(见图4e)。
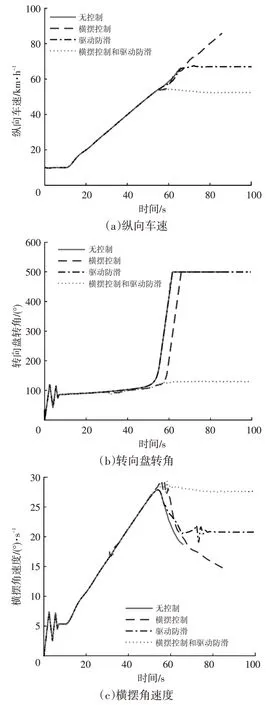
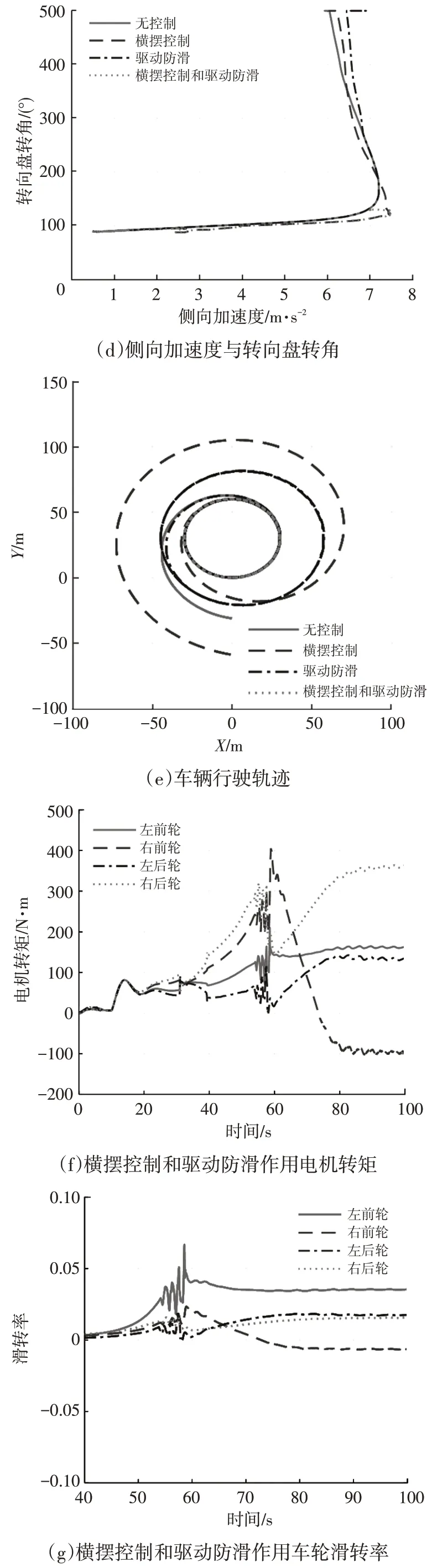
图4 分布式驱动稳定控制功能仿真结果
5 实车试验
本文通过固定转向盘转角加速转向工况实车试验对分布式驱动稳定控制功能进行验证。实车试验工况为:在平坦干沥青路面,固定转向盘转角180°匀速行驶一周,转弯半径为16 m,然后增加油门开度使车速提高,直至车辆严重失稳或油门开度达到100%并持续一段时间,停止试验。将车辆设置为无控制、横摆控制和驱动防滑协同控制2 种状态,分别进行上述实车测试,结果如图5所示。

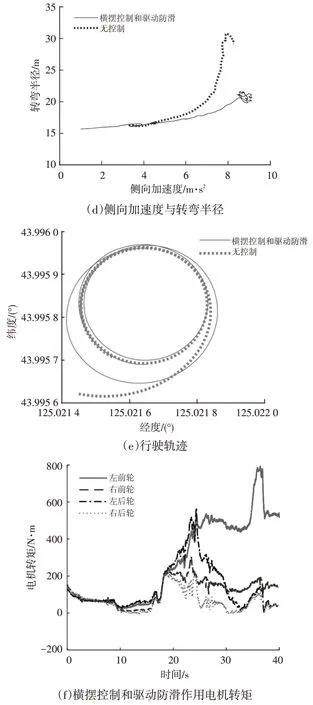
图5 分布式驱动稳定控制功能试验结果
在第18 s 前,驾驶员固定转向盘转角180°缓慢行驶,第18 s 时驾驶员缓慢增加油门,车辆开始加速(见图5a、图5b)。在无控制状态下,随着车速提高,车辆横摆角速度增加,侧向加速度增大,车辆转弯半径增大,不足转向特性增强(见图5c、图5d)。当车辆侧向加速度达到7.5 m/s时出现严重转向不足,当侧向加速度达到8.0 m/s时转弯半径达到30 m,车辆失去转向能力(见图5e)。
车辆在横摆控制和驱动防滑协同控制状态下,通过横摆控制提升车辆横摆角速度稳态响应,改善车辆不足转向现象,在侧向加速度达到8.0 m/s时转弯半径19 m,即在大侧向加速度下实现偏向中性转向的转弯半径,车辆最大侧向加速度相比无控制状态提升1 m/s,表明提升车辆转向极限(见图5c、图5d)。在第24 s时,车辆出现转向不足,根据车辆不足转向状态调整驱动防滑控制目标,降低车轮滑转率和车轮扭矩(见图5f),使车速稳定控制在48 km/h(见图5b),并保持稳定转弯半径为21 m。即使在第30 s 时驾驶员油门开度达到100%(见图5a),由于横摆控制和驱动防滑协同控制作用,车辆依然保持稳定转向行驶(见图5e)。
6 结束语
本文提出了驱动转向复合工况下分布式驱动稳定控制策略架构,以路面附着系数、纵向车速、侧偏角等核心状态估计技术为前提,设计了基于横摆角速度和侧偏角跟踪控制的横摆控制策略、基于滑转率跟踪控制的驱动防滑控制策略,以及横摆控制和驱动防滑扭矩协调控制策略。仿真测试和实车试验结果表明,在驱动转向复合工况下,通过分布式驱动稳定控制作用,车辆牵引性和操纵稳定性得到保证。
