高超声速风洞短时气动力智能辨识算法研究1)
2022-04-07王钦超李世超高宏力马贵林段志琴
王钦超 李世超 高宏力 马贵林 伍 广 段志琴
(西南交通大学机械工程学院,成都 610031)
引言
脉冲风洞测力试验作为高超声速飞行器研制的重要环节,是用来模拟飞行器实际工作环境时高超声速气体流动、验证飞行器设计性能等无可替代的手段[1-3],这种设备的有效试验持续时间很短(仅有1~ 300 ms 左右)[4].脉冲风洞中的气体来流以近似于阶跃力的形式施加于飞行器模型上,极强的气动力冲击使模型-天平-支撑(model-balance-support,MBS)系统发生振动,导致测力天平输出信号中真实气动力信号被惯性力信号等湮没,严重影响测试精度,并且在脉冲燃烧风洞的有效测力时间段内干扰信号无法通过阻尼特性衰减完全,给气动力辨识带来了困难[5].
为解决该难题,国内外一些专家从测力天平原理的角度出发,提出一些方案:加速度力天平通过在天平无变形处安装加速度计测量加速度信号,然后将天平测得的载荷信号和通过加速度计得到的惯性力信号相减来还原真实气动力信号.但加速度计放置位置受限,当飞行器模型较为复杂时,无法反映其真实惯性力信号[6-8];应力波天平先通过测量测力单元处结构传播和反射的应力波,然后代入相关的脉冲响应函数来计算飞行器模型所受气动力载荷,但为保证应力波的可靠传播,要求MBS 系统为一体化结构,因此在飞行器模型结构复杂的情况下,MBS系统无法满足应力波的有效传播[9-10].Wang 等[11-12]对杆式应变天平作进一步优化,明显提高了天平的动态特性,但无法从根本上解决惯性等干扰问题.Li 等[13-14]提出了包括悬挂测力技术,以及将盒式天平与天平支架进行一体化设计工作,消除各分量间的干扰的同时不占用模型内部空间,减少了流场干扰.但两种方法都无法对气动力干扰信号进行有效去除.磁悬挂天平和自由飞技术的优点是没有机械支撑结构引起的流场干扰,但目前技术尚不成熟[15].自由飞测试技术是通过在试验中,气流冲击时模型的悬挂线分离,使得飞行器模型在稳定的测试时间内自由飞行,该技术由高速摄像机以及加速度传感器来解算模型的受力情况[16],虽可以解决惯性力干扰问题,但该技术精度受限于相机分辨率,并且流场中的烟雾杂质会对辨识精度产生较大的干扰.综上所述,基于新型测力系统原理开发的角度,尚不能有效的抑制惯性力对真实气动力辨识精度的影响.
从测力系统的输出信号角度出发,目前对惯性力信号主流的处理方法为对信号低通滤波后取平均值[17],但前提是要求原始信号是理想的惯性力衰减的正弦波并且在有效试验时间内,完整的周期信号数要大于3.王锋等[18]通过建立新的正则化参数确定准则,以及将载荷的时程通过不同函数表达式之和进行描述等方法,将载荷辨识的问题转化为单参数优化、函数参数识别等不同形式的问题来识别得到惯性力.汪运鹏等[19]提出了人工智能深度学习技术的单矢量动态自校准方法,将原始信号通过深度学习网络模型处理滤除惯性力信号得到理想气动载荷.Luo 等[20]针对惯性力补偿不足的问题,提出波系拟合的方法在不影响直流分量的情况下分离惯性力引起的振动波.实践证明,以上处理方法应用于缩比模型的脉冲风洞时,精确度均可取得较为理想的结果.上述信号处理技术针对缩比飞行器模型(长度5 m以内,重量1000 kg 以下)的气动力测试环境下已经十分成熟.
由于吸气式高超声速流动的热化学反应及超燃冲压发动机内部的燃烧规律尚未找到缩比规律,同时,由于飞行器机体与推进系统存在强耦合效应,为了准确评价其气动特性,迫切需要开展真实尺度高超声速飞行器的机体/推进一体化测试[21].当前,真实尺度模型长度可达7~ 9 m,重达数吨,相较于常规高超声速风洞试验中的缩比模型(长度5 m 以内,重量1000 kg 以下),针对这类大尺度试验模型开展高超声速风洞测力试验具有极大的挑战性,主要原因如下.
(1) 首先大尺度飞行器模型整机测力系统刚度特性差,难以保证在有效试验时间内输出3 个以上周期信号,因此用传统对信号求平均的处理方法会带来较大误差.
(2) 其次用于大尺度飞行器模型风洞测力试验的MBS 系统中的浮动框和固定框无法视作刚体来进行动力学建模,有效试验时间段内模型、天平、支撑三者之间的接触面会产生不规则力传递,基于传递函数、脉冲响应函数及动力学模型的载荷识别方法的精度将受到较大干扰[22].此外,测力系统在振动过程中(测试过程中)结合部变刚度将导致输出信号中出现随机变频的干扰噪声,这类噪声难以通过传统的滤波手段解决.
(3) 目前基于深度学习算法可以对系统结构惯性力振动特征进行识别和滤除,但在飞行器模型大尺度化的情形下,随机变频的干扰噪声会极大影响惯性力的振动特征,进而对识别精度产生影响.
(4) 脉冲风洞运行期间由气动噪声引起的高频噪声同样会混入测力系统的输出信号中,对气动力的辨识产生干扰.
不同于(1)和(4),第(2)点由于MBS 系统之间的无规则振动导致的变频干扰分量会严重影响到最终的载荷识别精度,该干扰分量表现为频率变化、幅值随机变化、出现时间随机变化.目前常规滤波方法无法有效滤除该干扰分量;动力学建模、传递函数等方法由于该干扰分量的存在也无法精确的描述系统动态特性,因此在飞行器模型大尺度化及关注高温效应的空天技术工程的大背景下,如何保证测力系统的精度成为了亟需解决的难题,所以发展高精确度以及复杂试验工况下更加稳定可靠的气动力辨识算法变得更加迫切.
因此,本文提出了一种新的基于变分模态分解(variational modal decomposition,VMD)以及卷积神经网络(convolutional neural networks,CNN)结合门控循环神经网络(gated recurrent unit,GRU)信号处理方法并应用于脉冲燃烧风洞中,针对脉冲风洞短时特征以及大尺度飞行器模型带来的干扰等难点下进行算法模型处理得出稳态气动力信号,再通过静态标定公式得出模型所受气动力载荷.该气动力辨识算法有效提升了测力精度,尤其对于大尺度飞行器模型,并且增强了对噪声的抗干扰特性.进一步补充和完善了高超声速飞行器高焓特性研究技术,为后续高超声速飞行器试验提供了真实的理论依据及参考.
1 理论基础
为了改善大尺度重载飞行器模型在脉冲风洞试验中的各类干扰信号对气动力辨识精度的影响,本文提出了一种特征识别-特征训练-载荷识别相结合的方法,结合脉冲燃烧风洞工程实际的有效实验时间,为了增加该方法的普适性,假定有效时间为工程实际的最短时间,因此本方法输入为时长200 ms.其流程可简要描述为:(1)通过对原始振动信号的分解,可以将信号中的不同特征彼此分解(惯性力信号、结合部诱发的变频振动信号和气动噪声信号),进一步从而提取有用的特征,该过程称之为特征识别;(2)基于MBS 系统的特性建立特征训练模型,并将各类特征分别输入模型进行训练,此过程为特征训练过程;(3)将MBS 输出的原始信号输入训练好的模型中,模型将辨识信号中的各类干扰信号特征,并将其从原始信号中提出,最终输出辨识的气动力信号,此过程称之为载荷识别过程,从而提高气动力载荷的识别精度.
对于信号分解,传统经验模态分解(empirical mode decomposition,EMD)方法得到的本征模量函数(intrinsic mode function,IMF)存在模态混叠,导致信号的模态特征失去物理意义.VMD 是一种新的自适应信号分解处理方法,对非平稳、非线性信号具有良好的处理效果.VMD 是通过迭代搜寻变分模型最优解,来确定模态特征及其对应的中心频率和带宽.该方法有效克服了EMD 模态特征混叠的问题,实现对信号的有效分解.本文采用VMD 算法对原始振动信号进行自适应的分解,进而对后续处理带来更丰富的特征信息.
1.1 VMD 方法
VMD 算法的作用是将天平的原始输出信号进行分解,得到各类具有一定特征的分量信号.包括构造与求解约束变分问题两个环节,最终将原始信号分解为指定个数的IMF 分量[23].VMD 描述的变分问题为搜寻n个模态函数un(t),目标是每个模态的估计带宽和最小以及各模态特征的和为原始信号.VMD 算法的主要目标是使分解后的子信号更能准确有效的反映振动特征的物理意义如模态等,防止出现模态混叠进而对后续数据训练造成干扰,其次最大可能减少干扰信号的影响.
1.2 Pearson 相关系数
原始振动信号经过VMD 分解成不同的子信号后,其中有一些子信号包含后续提取真实气动力载荷所需要的模态特征,有一些则是不需要的噪声干扰信号(气动噪声与仪器噪声).为此,本文引入Pearson 相关系数来判别子信号是否为所需要的拥有模态特征的信号.
Pearson 相关系数是来衡量两个变量之间的相关程度,在本文中用来衡量不同子信号与原始振动信号之间的相关性,进而筛除不需要的噪声干扰信号.两个变量X和Y之间的Pearson 相关系数可以表示为
其中X为不同子信号;Y为原始振动信号;ρ(X,Y) 为两个信号之间的相关性系数;E为样本的数学期望.通常情况下系数范围在0.0~ 0.2 之间相关程度为极弱相关;系数范围在0.2~ 0.4 之间为弱相关;系数范围在0.4~ 0.6 之间为中等相关;系数范围在0.6~ 0.8之间为强相关;系数范围在0.8~ 1.0 之间为极强相关.
一般情况下系数低于0.2,则认为子信号与原始振动信号不相关[24].本文取该阈值为筛选临界值,若子信号相关性系数低于0.2,则将该信号筛除.
1.3 CNN-GRU 深度网络模型
为了保证特征训练的效果,需要一种既可以能够精确识别惯性力振动、变频等特征,又可以进一步反映这些有效特征之间蕴藏的时序信息,即一种兼顾数据的特征以及时序性关系的深度学习模型.CNN 是一类包含卷积计算且具有深度结构的前馈神经网络,卷积神经网络具有表征学习(representation learning)能力,可以直接从输入数据中通过卷积层和池化层来获取有效表征.该网络可以从输入数据中通过多层的非线性变换来自动学习特征,能够按其阶层结构对输入信息进行平移不变分类(shift-invariant classification),从而代替人工设计的特征,并且由于深层结构的特点使其具有较强的学习和表达能力[25-27].CNN 也用于发现和挖掘一维数据中隐藏的特征如周期信号、振动峰值等.因此本文使用CNN 来提取数据特征.
在卷积层之后,采用池化层对获取的惯性力振动等特征映射进行建模,并将其转换为隐藏层和存储单元之间的更抽象形式的特征.但是循环神经网络(recurrent neural network,RNN)面临着爆炸和消失梯度问题.与CNNs 不同的是,RNNs 有一个反向连接,其梯度爆炸的问题极大地影响了模型的准确性,而这个问题可以通过长短期记忆网络(long short-term memory,LSTM)来解决[28].这是RNN 的高级体系结构,特别是针对时间特性中的远程依赖性而设计的.LSTM 的内部结构包括多个细胞块,单元状态和隐藏状态从一个块转移到另一个块,而存储块通过门来记忆状态.LSTM 体系结构包括输入、遗忘和输出3 个门,而GRU 只有两个门层:复位(Y)门和更新(Z)门.更新门检查前一个单元的内存以保持活动状态,复位门用于将下一个单元的输入序列与前一个单元的内存相结合,然而,LSTM 在某些方面有点不同:首先,GRU 单元由两个门组成,而LSTM 是由3 个门组成的.其次,将LSTM 中的输入门和遗忘门合并为更新门,直接采用隐态复位门.GRU 单元的一般方程如式(2)所示.运行流程共分为4 步,其中reset gate 负责决定ht-1对new memory的影响,new memory是对新的输入xt和上一时刻的hidden stateht-1的总结.update gatezt负责决定传递多少ht-1到ht,最后hidden stateht由ht-1和相加得到,两者的权重由update gatezt来控制.选择多层GRU,因为它们的参数数目较少,训练速度较快[28].LSTM和GRU 的总体架构如图1 所示为了准确的滤除多种干扰信号,得到准确的真实气动力信号,本文分别采用多层CNN和GRU 进行有效的序列表征和学习.基于深度学习网络参数设定方法,再反复验证测试后得到模型达到最优的参数如表1 所示,序号表示该算法深度神经网络的结构顺序,其中CNN 层用于从输入的精细数据中提取空间特征,然后输入多层GRU.CNN 层的Relu 激活函数和核大小为1,滤波器大小分别为1 × 16和1 × 8.提取空间特征后,将其输入GRU 层.用两个GRU 层对时间特征进行建模.GRU 第一层和第二层的单元节点数量分别为64和128.最后用一个全连接层和Dropout 层输出得到真实气动力载荷.该神经网络结构通过采用Adam 算法优化,损失函数采用均方误差MSE 来完成训练.通过悬挂测力实验台采集到的数据集对所提出的模型进行了评估.

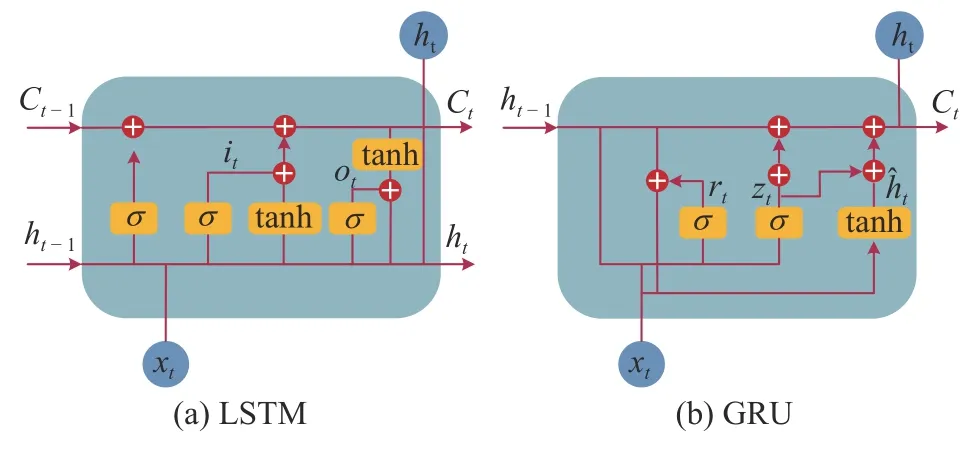
图1 LSTM和GRU 网络模块结构Fig.1 LSTM and GRU network module structure

表1 CNN-GRU 深度学习模型参数Table 1 CNN-GRU structure and parameters
1.4 基于VMD和CNN-GRU 的识别方法
由于噪声和随机变频振动的干扰信号存在,准确提取真实气动力是一项困难的任务,而随着飞行器尺寸的逐渐增大,该项任务也越发变得艰难,为此本文开发了一个新框架.
如图2 所示为本文提出的VCG (VMD-CNNGRU)算法流程,考虑到原始风洞信号的非平稳性和非线性,算法流程包含数据前处理以及训练算法两部分.第一步首先采用VMD 算法对原始数据进行分解来突出信号的特征.分解得到的矩阵数据量比较庞大且存在部分噪声干扰子信号,利用Pearson 相关性计算判定每个子信号的含噪程度,筛选出不同模态的有效子信号,加上原始信号来完成特征矩阵构建.采用标准和最小-最大标量技术将输入数据集规范化为特定范围.然后将处理后的输入数据送入训练阶段.接下来,开发了一个将多层CNN 与GRU模型相结合的混合模型,经过神经网络对特征矩阵进行特征挖掘后得到真实气动力载荷信号.具体流程如下:

图2 基于VMD-CNN-GRU 的气动力信号提取算法流程Fig.2 Aerodynamic signal extraction algorithm flow based on VMDCNN-GRU
(1) 采集悬挂测力实验台阶跃应变信号;
(2) 对原始振动信号进行VMD 分解,得到具有不同模态特征的子信号;
(3) 将分解后的子信号与原始振动信号进行相关性分析,筛除含噪程度高的子信号;
(4) 根据归一化后的特征矩阵,划分训练、测试、验证集数据,设定CNN-GRU 深度神经网络参数,最终完成训练得到模型.
2 试验验证
2.1 试验装置介绍及可信度分析
目前,在脉冲风洞中主要的气动力测试技术包括盒式天平、杆式天平和悬挂测力系统.前两类设备安装在飞行器试验模型内部,占用了注油块、推进系统等功能部件的安装空间,导致试验难度剧增.为此本团队设计了一种悬挂测力系统,将原本安装在模型内部的测力传感器置于模型外,并与模型支撑系统融合为一体,有效克服了传统测力技术占用模型内部空间的缺陷,并且具有支撑刚度大、对流场干扰小的优点,对于全尺度模型试验具有较大的优势,其测试原理简要描述如下.
悬挂测力系统主要由带有应变传感器的悬挂拉杆、固定框架以及飞行器模型构成.当风洞试验气体来流冲击时,由于悬挂测力系统的框架与地面固定,固定框不与地面发生相对运动.而飞行器模型受到气动力冲击后相对固定支架产生位移以及振动,并将该气动力传递给悬挂拉杆上的传感器,最后输出为电压增量信号.由于悬挂测力系统拉杆结构较多,无法做到一体化加工,在受到气动力冲击时,此时由于复杂的加工装配使受力结合部不断激振,导致传感器输出信号中出现比较明显的气动力干扰.因此,本文设计并搭建了悬挂测力实验台,用于验证本文所提出的VCG 算法的全尺寸试验模型气动力载荷辨识方法的合理性.
为保证在该悬挂测力实验台所得数据的准确性,首先要确保该实验台与真实风洞悬挂测力系统的相似性,对此本文从结构、刚度特性、材料等方面做出比较,从表2 中可以得出:结构方面,该实验台与真实风洞悬挂测力系统的结构形式相同.测力拉杆、应变传感器等关键部件所用材料属性完全相同,且都为6 通道的测力悬挂装置.在载荷的加载方式上,实验台完全采用了真实风洞悬挂测力系统工作时气体来流近似于阶跃力的施加形式.综上得出,本研究所用实验台可以真实反映和还原脉冲风洞中悬挂测力系统的特性.尤其在刚度特性方面可以准确的反映信号的受干扰程度.

表2 悬挂测力实验台与风洞悬挂测力系统对比Table 2 Comparison of suspension force measuring test bench with suspension force measuring system
2.2 试验数据采集及可靠性验证
本文所用的悬挂测力系统实验台如图3 所示,该测力装置主要由悬挂测力实验台以及采集系统构成.采集系统包括直流稳压电源和信号采集仪来采集稳定的传感器信号.悬挂测力实验台正中间为测力模型,连接悬挂支架与测力模型之间的为二力杆,并且该杆靠近支架一侧附有应变传感器,用来采集不同通道的应变信号.为了模拟脉冲风洞中实际来流对测力系统振荡冲击的影响,试验的载荷形式为阶跃力施加,具体通过从一定高度释放砝码来实现不同的阶跃力.由于该测力系统结构较为复杂,在一定重量的砝码冲击下,包括受力结合面等在内的测力系统传力路径发生无规则变化,导致MBS 激发起不同的模态以及非线性振荡.最终体现在应变输出信号中含多种干扰噪声.
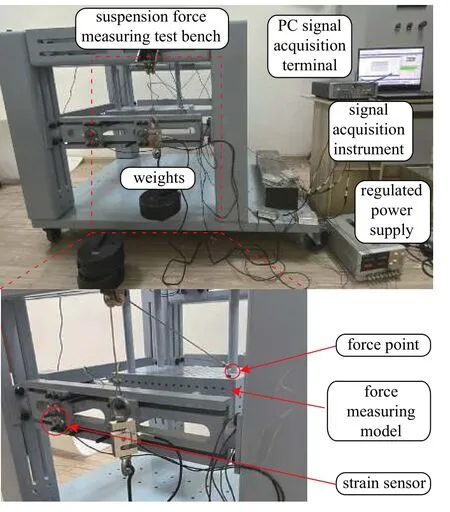
图3 阶跃载荷训练样本采集系统Fig.3 Step load training sample acquisition system
为得到本文算法训练样本,阶跃载荷加载装置通过螺栓固定在测力模型不同位置点处,每个位置点位置间隔固定,再通过钢丝绳连接滑轮,滑轮另一端配置砝码盘,每一组实验从固定高度释放不同配重的砝码来实现一组阶跃载荷的施加.每次施加载荷都为六分量综合加载,但由于加载高度和受力点空间位置已知,因此可以将该载荷分解为不同的分量载荷.为了保证训练样本数据与风洞真实数据的一致性,试验阶跃载荷量程是通过脉冲燃烧风洞输出信号的量程大小而确定,量程大小为0~ 600 N.采样率和信号输出幅值区间与脉冲燃烧风洞输出信号保持一致,因此采样率设置为10 000 Hz,信号输出区间保持在-10~ 10 mV.在数据量方面,训练神经网络模型所需要的数据量取决于模型的复杂度,训练数据达到一定数量后,模型的效果提升有限[29-31]。因此本文采集共计126 组阶跃载荷相应数据来进行特征学习训练,其中100 组作为训练集,26 组作为验证集进行后续验证测试。此时算法模型精度并不会随着数据量增大而提高。
2.3 测试验证结果
本文通过均方根误差(RMSE)、均方误差(MSE)以及绝对误差(MAE)度量分别对该算法进行评估,MSE计算真值和预测值之间的平均平方值,MAE来衡量预测值与真实值之间的平均绝对误差,该指标可以避免误差相互抵消的问题,因而可以准确反映实际预测误差的大小.RMSE是回归模型的典型指标,用于指示模型在预测中会产生多大的误差,对于特大或者特小误差反映敏感.3 项指标越小,代表误差越小且模型越准确.不同指标的数学表达式如下

VCG 算法更适用于解决在大尺度重载工况下,测力系统受到风洞来流冲击时,包括惯性力振动、受力结合面不断拍振引起的干扰信号等在内的输出信号无规则振动的问题.此刻真实气动力信号被淹没在干扰信号中.为验证VCG 算法模型在极限工况下的性能,本文通过式(3)~式(5) 3 个评价指标来对比目前主流的不同算法.首先,目前工程领域应用最为广泛的算法为滤波后均值以及傅里叶变换法,除此之外,也有比较先进的算法例如:根据测量得到的结构响应,结合测力系统的传递函数反求结构的气动力载荷;深度学习方法有卷积神经网络法和循环神经网络法.本文将VCG 算法与以上4 种方法通过12 组验证数据进行对比,12 组数据均为冲击载荷严重时的应变输出.如表3 所示,MAE,MSE以及RMSE3 项指标中VCG 算法效果最好,滤波均值法效果次之,这是因为滤波均值法首先通过低通滤波器滤除了大量高频噪声信号,在通过均值得出真实气动力,但相对于VCG 法,无法精确的消除信号中的干扰分量,尤其是当原始信号中存在飞行器模型尺寸较大引起的变频干扰信号时,这些传统方法都无法有效滤除该干扰信号,因此精度较低.相反,VCG 法可以准确的识别惯性力振动等特征以及滤除干扰分量,因此气动力辨识精度较高.可见VCG法抗干扰能力较强,能够适应在复杂工况下得到准确的气动力应变输出.

表3 不同算法的数据误差验证Table 3 Validation data errors of VCG,MEAN and Fourier method
3 VCG 法在脉冲燃烧风洞中的应用
通过悬挂测力实验台上的验证,本文提出的VCG 法对于解决大尺度重载飞行器模型的气动力辨识结果理想,因此进一步应用于脉冲燃烧风洞气动力辨识中.首先对脉冲燃烧风洞中的悬挂测力系统进行阶跃载荷试验,得到悬挂测力系统的VCG 算法模型,然后通过脉冲风洞试验得到气动力信号输出,应用该算法模型得到真实气动力信号.在中国空气动力研究与发展中心高超声速技术研究中心的Φ600mm 脉冲燃烧风洞中开展该测力实验,脉冲燃烧风洞通过采用燃烧加热的方式获取高总焓来模拟高超声速飞行的地面试验装置,本文通过VCG 算法对脉冲燃烧风洞中进行的悬挂测力系统中输出信号进行了处理.图4 给出了马赫数为6、冷流工况下悬挂测力系统的升力通道输出信号曲线以及总压信号.飞行器模型攻角、偏航角度均为 0°,模拟飞行角度为26 km.通过总压信号可以得出,在0.2 s 左右风洞开始启动,直至0.32 s 左右来流趋于稳定,之后260 ms 左右的时间段为稳定段,在0.63 s 后,总压开始下降,真空罐的反压回流开始冲击作用到飞行器模型上,产生大幅度不规则振荡,此后的数据为无效数据.
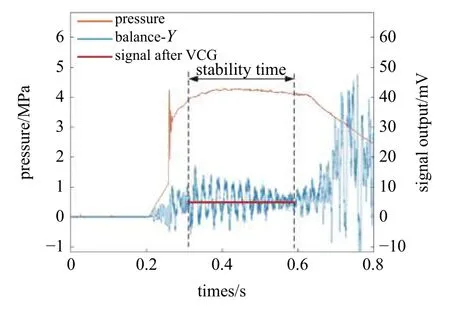
图4 天平以及总压输出信号Fig.4 Total pressure and balance output signals
在有效稳定时间段内,VCG 算法可以很好的避免不同干扰因素的影响,这是由于在脉冲风洞中悬挂测力系统刚度减弱,在气体来流冲击下,结合部传力路径上的结合部振荡,引起输出信号的变频等干扰成分增加.而VCG 算法首先通过VMD 分解去除相关性不强的噪音子信号后,再通过CNN-GRU 深度学习网络提取有效特征信息进行数据训练,消除了由不同干扰因素引起的噪音干扰,因此滤波抗噪效果较好.
4 结论
(1)在脉冲风洞中飞行器模型大尺度化的趋势下,针对测力系统的测量精确度难以保证的问题,本文提出了VCG 算法模型,该算法将原始风洞信号先通过VMD 分解成若干子信号后,再通过相关性分析筛选出拥有惯性力振动等有效特征的子信号输入CNN-GRU 网络进行气动力辨识.该方法相对于平均法、FFT 法等其他算法可以更精确的识别有效特征信息以及筛除干扰分量,从而得到准确的真实气动力分量.
(2)通过试验验证得出,VCG 法在MAE,MSE和RMSE3 项评价误差指标中均表现最好.相对于VCG 法来说,FFT 法、滤波均值法等方法在输入原始信号中干扰噪声严重,尤其是受力结合部激振导致输出信号有变频干扰时无法准确的滤除干扰分量,导致气动力辨识精度较低.VCG 法更适用于在飞行器模型尺寸较大导致干扰噪声严重的情况下的气动力辨识.
(3)该方法的提出有助于提升测力系统在飞行器模型大尺度化、非平衡热化学反应等复杂极端的条件下的测量精度,进一步发展高超声速流动的真实气体效应研究以及带动力一体化飞行器的研制,具有现实意义以及工程实践意义.
