汽车电子稳定控制系统控制策略仿真
2022-04-06张丽霞严涛峰张文彩潘福全
张丽霞,严涛峰,张文彩,潘福全
(青岛理工大学机械与汽车工程学院,青岛 266520)
汽车电子稳定控制系统(electronic stability control, ESC)结合防抱死系统(antilock brake system, ABS)、驱动防滑系统(acceleration slip regulation, ASR)的优点,不仅能防止紧急制动时车轮抱死,还防止低附着路面上驱动轮打滑,多种传感器收集更精确的数据提高汽车的安全性,更好地保证汽车的操纵稳定性[1]。在汽车纵向和侧向方向发生不稳定工况时,汽车ESC系统施加控制,保证车辆稳定行驶,减少因低附着路面转向或驾驶员操作不当等引起汽车失稳的现象[2]。
张庭芳等[3]在稳定性控制中应用滑模控制算法设计了反馈控制器,在该策略下横摆角速度和质心侧偏角的实际值可以较好地跟踪理想值,提高了汽车的操纵稳定性。Shi等[4]采用估计汽车质心侧偏角来提高对质心侧偏角的控制精度。设计了附加横摆力矩的比例-积分-微分(proportional-integral-derivative,PID)控制器、模糊逻辑控制器和模糊PID逻辑联合控制器。结果表明模糊PID联合控制策略控制效果最好。郭海文等[5]提出了一种具有自适应性能的滑模控制策略,实时跟踪控制汽车的横摆角速度,在不同的输入条件下进行仿真分析,仿真结果相比PID控制效果要好。张新峰等[6]采用分层控制结构设计横向稳定性控制器。上层控制器利用滑模控制方法计算附加横摆力矩;下层控制器对附加横摆力矩进行轮间分配,保证车辆的横向稳定性。曹天琳等[7]对模糊控制策略进行研究分析,分析横摆角速度和质心侧偏角对汽车稳定性的影响,采取联合模糊控制的方式对汽车稳定性控制,采取差动制动的方法对整车模型进行控制。梅炜炜等[8]采用自适应模糊比例-积分(proportional-integral,PI)控制方法设计了横摆角速度和质心侧偏角综合反馈控制器,并根据路面附着条件和β-Method 理论设计了基于横摆角速度和质心侧偏角的综合反馈控制策略研究主动转向系统。仿真结果表明,基于横摆角速度和质心侧偏角综合反馈控制的汽车稳定性效果要优于单纯的横摆角速度控制。江浩斌等[9]设计了基于横摆角速度与质心侧偏角的联合滑模变结构控制策略,并对电动汽车的驱动直接横摆力矩控制(direct yaw moment control,DYC)系统进行了仿真分析。结果表明,设计的联合滑模变结构控制器具有良好的鲁棒性,能较好地控制车辆的横摆角速度和质心侧偏角。文献[10]提出了一种分层控制结构,上层对横摆速度和质心侧偏角进行滑模联合控制,但控制器的联合控制参数只进行单纯相加无法保证控制器的控制精度。前人对于联合控制策略进行了大量研究,虽说联合控制策略具有良好的稳定性控制能力,但联合控制参数需要在模型中进行随时调节,不但耗时且可能存在偏差。另外滑模控制在理论上是一种非线性结构,滑模控制为非线性系统提供了一种鲁棒性很强的控制方法。但人们在设计滑模控制策略时,较少的考虑到滑模控制中产生抖振对于控制效果的影响,其次滑模控制不如积分滑模控制法直接,积分滑模方法可以更直接地控制,使系统在初始状态就处于滑模面,提高系统鲁棒性。
因此,现基于对两个控制变量进行联合控制,采用质心侧偏角协调加权法调节横摆角速度和质心侧偏角偏差的权重比例对参数进行调节,基于等效控制法设计积分滑模控制器,缩短调节的时间且降低系统存在的偏差,并通过模糊控制规则调节控制器的切换增益值,削弱滑模控制系统的抖振影响,并提高系统的收敛速度;以参数自整定模糊PI控制为对比对象,基于搭建模糊滑模控制仿真模型,对车辆在低附着系数路面上阶跃和正弦两种工况下进行仿真,分析在模糊滑模控制策略下的汽车ESC控制效果。
1 线性二自由度模型建立
在搭建汽车整车模型的时候,模型自由度越高,其复杂程度就越高,精度同样也会变得越高,高精度的模型对实验的条件要求比较高。根据仿真试验的需要,只需要考虑汽车侧向、纵向和横摆3个运动,不考虑汽车的垂直运动。因此,搭建线性二自由度模型可以更好地掌握汽车操纵稳定性的基本特性和车辆的稳定运动状态。线性二自由度模型结构如图1所示。

L为轴距;Fy1为前轮侧向力;Fy2为后轮侧向力;u1为前轴中点处速度;u2为后轴中点处速度;v1为纵向车速与侧向车速的合速度;ζ为u1与x轴的夹角
经受力分析,可得线性二自由度运动微分方程为
(1)
式(1)中:m为汽车质量;δ为前轮转角;Vx为纵向车速;r为横摆角速度;Vy为侧向车速;Iz为绕z轴的转动惯量;a、b为前后轴到质心的距离;k1为前轮偏刚度;k2为后轮侧偏刚度;α1、α2分别为前后轮侧偏角;β为质心侧偏角。
2 汽车稳定性控制变量及横摆力矩分析
2.1 汽车ESC控制变量理想值计算

(2)
(3)
为了保证汽车的稳定性,侧向加速度ay必须小于道路附着系数μ所产生的加速度,即ay=rVx≤μg,g为重力加速度进而可得rmax。综合考虑路面附着条件和车辆的转向特征,得到理想横摆角速度理想值rd=min{|r|,|rmax|}。
由式(1)可得理想质心侧偏角的表达式为
(4)
同理,可得βmax,进而可得质心侧偏角理想值βd=min{|β|,|βmax|}。
2.2 汽车失稳状态判断
汽车稳定性控制系统的主要作用就是在汽车临界稳定的工况时施加控制,避免进入非稳定工况后失稳。对汽车行驶稳定性进行判断时,就需要对横摆角速度和质心侧偏角的范围进行判断。因此,判断稳定性表达式可建立为
(5)
式(5)中:C为常系数;B1、B2为稳定常数。
根据控制变量运动参数,若不满足公式,则表明车辆失稳,汽车ESC需要施加横摆力矩控制。若满足公式,则计算偏差Δr是否超过阈值。若偏差超过阈值,表明车辆失稳,需要进行控制;若偏差在临界值内,表明车辆稳定无须控制。
2.3 直接横摆力矩控制策略分析
汽车电子稳定控制系统(ESC)通过判断是否超过设定的横摆角速度和质心侧偏角阈值来判断汽车的行驶状态,对于超过阈值有失稳倾向的车辆,通过直接横摆力矩控制器决策出维持车辆稳定性所需的附加横摆力矩ΔM,然后力矩分配模块计算出每个车轮应该有的制动力矩Tbi,通过轮毂电机的输出转矩从而控制4个车轮的制动力,实现汽车的稳定性控制。直接横摆力矩控制原理如图2所示。

图2 直接横摆力矩控制原理
实际行驶中,差动制动是解决汽车失稳现象的一种很有效的方法。通过对汽车左右两车轮的差动制动产生的附加横摆力矩进行直接控制,可以很好地纠正汽车的不稳定方向使汽车趋于稳定方向行驶[3]。在汽车不稳定行驶过程中产生较大的质心侧偏角和侧向加速度的时候,对汽车施加相应的横摆力矩控制可以很好地控制汽车的稳定性。
汽车电子稳定控制系统采用差动制动单轮控制的方式,对汽车进行车轮制动控制的时,各个车轮所在的位置不同产生的制动力也不同。单轮制动时产生的横摆力矩如图3所示。

图3 单轮制动时产生的横摆力矩
从图3可知,对行驶中汽车的4个不同车轮进行单独制动的时候,4个车轮会产生大小方向各不相同的横摆力矩,可以看出对每个车轮的制动后的效果是不同的。因此,单轮制动时选择对外前轮和内后轮进行制动时效果更好。因为制动这两个轮,并不需要太大的制动力就可以产生较大的横摆力矩,可以很好地实现汽车稳定性控制。当汽车转向过程中发生不足转向的时候,可以优先控制汽车的内后轮;当汽车转向发生过度转向时,优先控制汽车的外前轮。
3 汽车ESC模糊滑模控制策略分析
3.1 参数自整定模糊PI控制策略
由于PID控制进行参数整定时比较困难且抗干扰能力也比较弱,控制效果受到整定参数好坏的影响。因此,利用模糊控制的方法对PID控制中的P和I两个参数进行整定。同时对两个控制变量进行联合控制,设计两个模糊控制器自动调节两个PI控制器的参数[12]。以横摆角速度模糊PI控制器为例进行设计。控制原理如图4所示。

图4 横摆角速度模糊PI控制原理
设计横摆角速度模糊PI控制器输入输出变量的论域、模糊子集、隶属度函数和模糊控制规则等,具体工作如下。
3.1.1 论域
横摆角速度偏差e范围是[-1,1],横摆角速度偏差变化率ec范围为[-1,1],将物理论域转换成离散论域,e、ec量化因子取值分别取为1/e、1/ec,得到偏差的论域E为[-1,1],偏差变化率的论域EC为[-1,1],控制器的输出变量的论域U为[0,1]。
3.1.2 模糊集、隶属度函数
输入和输出变量的论域模糊后的模糊子集对应为{NB NM NS ZO PS PM PB};模糊子集中,NB、NM、NS、ZO、PS、PM、PB分别表示负大、负中、负小、零、正小、正中、正大。
由于三角形隶属度函数有更高的分辨率和更好的控制灵敏度,因此使用三角形隶属度函数。函数曲线如图5所示。
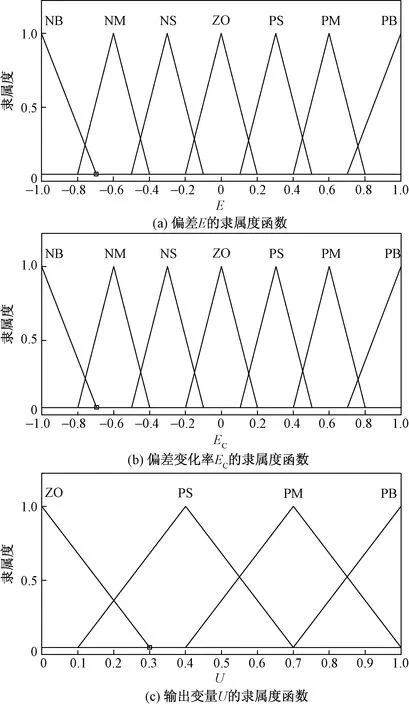
图5 隶属度函数曲线
3.1.3 模糊控制规则
基于模糊控制理论,结合PI参数自整定规则和专家总结的控制经验,得到横摆角速度模糊PI控制规则表如表1所示。

表1 横摆角速度模糊PI控制规则表
选取Mamdani法作为模糊推理的方法,考虑到控制稳定性的要求,采用面积重心法作为解模糊的方法[13]。由模糊规则确定的输入与输出变量之间的关系,得到了横摆角速度模糊PI控制器的输入变量与输出变量的对应关系曲线,如图6所示。

图6 横摆角速度模糊PI控制器输入、输出关系
同理,按照相同的设计原理建立质心侧偏角模糊PI控制器。并搭建参数自整定模糊PI联合控制器模型如图7所示。

Ke1为横摆角速度模糊PI控制器比例系数;Ke2为横摆角速度模糊PI控制器参数的修正系数;Ke3为质心侧偏角模糊PI控制器比例系数;Ke4为质心侧偏角模糊PI控制器参数的修正系数;Kec1为质心侧偏角模糊PI控制器积分系数;Kec2为横摆角速度模糊PI控制器积分系数;K1为横摆角速度加权系数;K2为质心侧偏角加权系数
3.2 模糊滑模控制策略
3.2.1 基于等效控制法的积分滑模控制器设计
首先,在设计滑模控制器时,采用等效控制法设计等效控制器ue和切换控制器us;其次,积分滑模控制器在切换函数中引入积分项,能有效地增强控制系统的稳定性能和抑制系统抖振降低稳态误差,因此建立积分滑模控制器[14]。
控制变量的联合偏差为
e=(rd-r)+ξ(βd-β)
(6)
横摆角速度与质心侧偏角存在耦合关系,必须同时控制两个变量,采用质心侧偏角协调加权法调节变量偏差的权重比例,找到最佳的控制比例实现稳定性控制。根据稳定性和|β|的关系,设计的质心侧偏角协调加权系数ξ为
(7)
式(7)中:β0为质心侧偏角下限值;β1为质心侧偏角上限值。
设计积分滑模切换函数,引入积分项,得到滑模控制系统的切换函数为
s=rd-r+ξ(βd-β)+

(8)
式(8)中:c为常数,c较大时,滑模控制系统可以在短时间内达到稳定状态,但c过大时,则会增大系统的抖振。
将横摆力矩ΔM施加到线性二自由度模型后的表达式为
(9)
式(9)中:Fy1、Fy2分别为前后轮的轮胎侧向力。
对式(8)求导并令其等于零,再将式(5)代入,因此可得等效控制器ue为

ξ(βd-β)]}-aFy1+bFy2
(10)
为了能够保证滑模系统能达到滑模状态,系统的切换控制器us设计为
(11)
由式(10)、式(11)可得,施加给整车的理想ΔM为
ΔM=ue+us

(12)
定义李雅普诺夫函数为
(13)
对积分滑模控制系统进行稳定性证明,对李雅普诺夫函数求一阶导数,即


(14)
将式(12)代入式(14)中,得
=-(D+η)|s|,≤-η|s|≤0
(15)

3.2.2 模糊控制削弱系统的抖振
采用模糊控制规则调节滑模控制器的切换增益,削弱滑模控制系统的抖振影响,模糊滑模控制原理如图8所示。

图8 模糊滑模控制原理


(16)
ΔK={NB NM NS ZO PS PM PB}
(17)
式中:NB、NM、NS、ZO、PS、PM、PB分别表示负大、负中、负小、零、正小、正中、正大。
模糊控制器中设计的控制规则如下。

对K值进行计算,采用积分法对切换增益K的上界值估计,公式为
(18)

进行切换控制器us设计时,sgn(s)是不连续函数,会导致输入的信号产生抖振。因此,对不连续性函数sgn(s)采用饱和函数sat(s)来表达[15],表达式为
(19)
在MATLAB/Simulink中搭建模糊滑模控制器,搭建后的模型如图9所示。

图9 模糊滑模控制仿真结构
4 汽车ESC模糊滑模控制仿真
基于搭建的模糊滑模控制仿真模型进行仿真分析。将参数自整定模糊PI控制效果作为对比对象。分别在低附着系数路面上进行阶跃和正弦两种工况下的仿真,分析两种不同控制策略的控制效果。仿真控制结构如图10所示。

图10 两种控制策略下的汽车ESC仿真结构
4.1 前轮转角阶跃输入仿真工况
仿真选取的汽车初始速度80 km/h,在2 s时输入1个阶跃信号,最大值输入为0.05 rad,路面附着系数为0.5,仿真结果如图11所示。

图11 阶跃输入下两种不同控制前后的仿真结果对比
4.2 前轮转角正弦输入仿真工况
同样选取的汽车初始速度80 km/h,汽车前轮转角输入正弦信号,最大值输入为0.1 rad,频率为0.2 Hz,路面附着系数为0.5,仿真结果如图12所示。

图12 正弦输入下两种不同控制前后的仿真结果对比
图11和图12将模糊滑模控制的仿真结果与参数自整定模糊PI控制的仿真结果比较,可以得出以下结论。
(1)采用模糊滑模控制,在设定参数的前轮转角阶跃工况下,几乎没有超调量,跟踪速度快,在2 s左右进入稳定状态,稳态值大约在0.175 rad/s,接近理想值0.17 rad/s;质心侧偏角也几乎没有超调量,跟踪速度快,2.5 s左右就进入稳定状态,稳态值大约在0.015 rad,接近理想值0.012 rad,对两个变量的控制效果都很好。在正弦工况下,横摆角速度的最大超调量为0.25 rad/s,接近理想值0.21 rad/s,质心侧偏角的最大超调量在0.046 rad左右,接近理想值0.038 rad,跟踪速度快,都能比较好地跟踪理想曲线,控制效果好。同时,模糊滑模控制在前轮转角阶跃和正弦工况都能及时产生较大的控制力矩应对汽车的不稳定性变化,使汽车趋于稳定。
(2)模糊滑模控制后的曲线几乎是与理想值曲线重合,响应的速度快,曲线进入稳定状态时间早,并且汽车稳定后的稳态值也与理想值更加接近,可以看出模糊滑模控制的效果比参数自整定模糊PI控制效果要好;同时,从附加横摆力矩控制图中可以看出模糊滑模控制产生的附加横摆力矩更大且横摆力矩响应速度更快,控制效果更加明显。
5 结论
对汽车ESC系统控制策略进行分析研究,可以极大地提高汽车地主动安全性,从而保证车辆有良好的操纵稳定性,减少车辆出现失稳的危险现象;该研究方法对于后续的学习和优化改进电子稳定控制系统控制策略具有一定的理论意义和参考价值。通过对模糊滑模控制原理、在低附着系数路面上进行阶跃和正弦两种工况的仿真分析,验证模型的可靠性,可以得出以下结论。
(1)模糊滑模控制后的曲线几乎与理想值重合,能够较好地跟踪理想曲线,并且进入稳态的时间早,其控制效果更加明显。
(2)与参数自整定模糊PI控制策略相比,模糊滑模控制产生的附加横摆力矩更大且响应速度更快,能够保证汽车快速趋于稳定。
(3)采用模糊滑模控制后,进入稳态的时间减少,几乎没有超调量,车辆能够快速地进入稳定状态,保证了车辆转弯时的稳定性,此时控制系统的稳定性好,且处于稳定状态,相应滑模系统的抖振降低。
