浅析GPS 测量技术在工程测量中的应用
2022-04-06吴利荣
吴利荣
(山西省煤炭地质物探测绘院有限公司,山西 晋中 030600)
GPS 测量技术是新时代具有代表性的一项科学技术,该项技术应用范围较广泛、作业可行性强,适用于高精度要求的测量项目。基于此,本文对工程测量中GPS 测量技术的应用形式进行了简要分析。
1 GPS 测量技术的原理分析
基于GPS 技术的定位测量系统原理为,借助于接收GPS信号的工具以及发射该信号的卫星设备,确定卫星与接收机之间的实际距离参数,然后测算卫星发出一直到被反射回信号的整体时间,进一步计算测量点的准确坐标数据。GPS 的测量定位最原始是运用了空间的后方距离交会测定指定点坐标方法,具体来说,实际测量载波信号时,可能会同时选择4 颗卫星,也可能数量更多,其中将信号从发射到反射回卫星装置的时间设为t,而卫星与实际测量位置两点距离为S,那么其定位测量的公式可表示为S=c*t/2,其中,卫星的三维坐标位置参数是可以获取的,再结合公式进行计算,就可以得到更为测量点的准确坐标数据。GPS 测量技术的实践方法有许多种,在实际测量工作中具体采用哪种类型方法还需结合实际情况判断。表1 为不同等级及不同接收机类型的GPS测量技术指标。
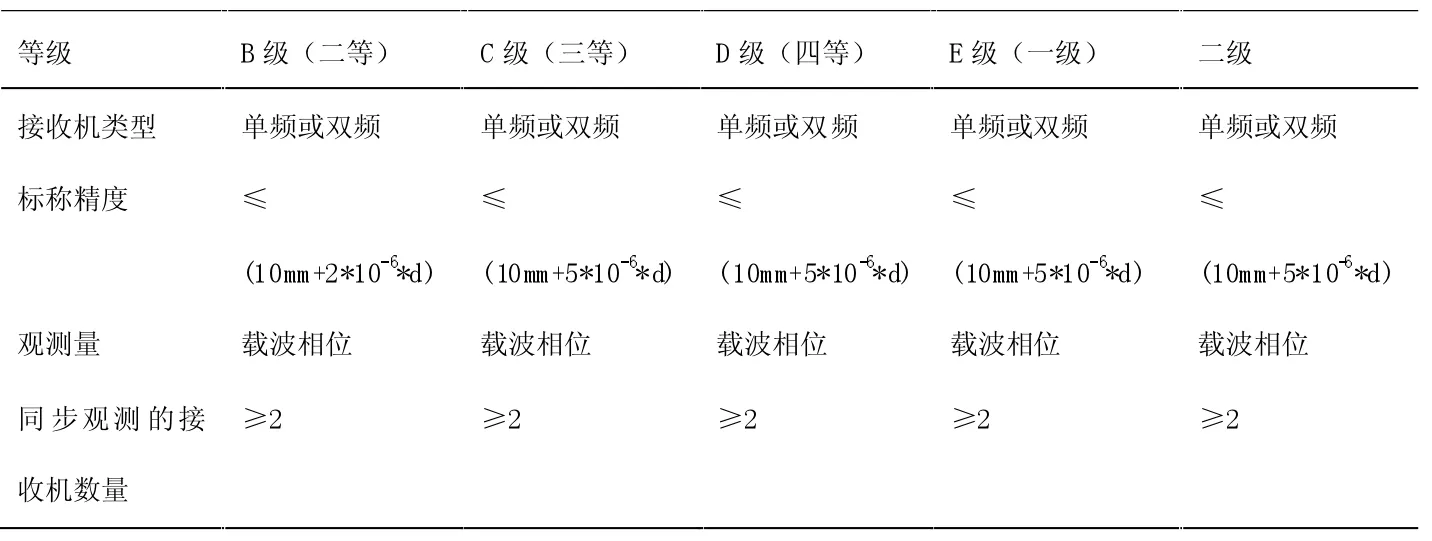
表1 GPS 测量接收机的技术指标
2 GPS 测量技术的优势分析
2.1 测量定位较迅速
在运用GPS 测量技术时,相应的信号由测量卫星发出,最终会被安装的接收信号装置所接收,然后再将信号数据通过转换计算获得测点的坐标数据。根据卫星传输信号的特点可知,其速度可相当于光速,因而接收机接收信号也是十分迅速,进一步缩短了转换为坐标数据的时间,例如,采用静态观测方式测量定位时,GPS 技术设备对于平均边长约为9km的测量区域,可以实现30min 以内的精准定位,与普通测量定位方式相比速度是较快的。此外,工程测量中运用GPS 测量技术,只要确保接收相应GPS 信号的终端数量足够,那么整个工程都可以被覆盖,切实落实测量工作,提升工程实施效率,也能够保证测量结果的可靠性,因此,目前的工程测量中,这种新型测量技术已经占据了重要地位,甚至是一些工程中必不可少的测量手段。
2.2 实际操作较简便
当前的GPS 测量技术还在不断研发更新,其技术水平还有着很大提升空间,在需工程测量工作中,GPS 测量技术也实现了自动化与智能化,减少了繁琐的人工操作,使得便捷性变得更强,比如说静态导线测量过程中,专业技术人员只需要对接收器进行检查并调整、监督其运行状态,同时,通过直接设置接收参数,对相应控制点进行设备开机操作,就可实现自动化接收信号的定位测量。测量系统的智能化还体现在自动开展数据收集及处理工作,测量完成后只需关闭设备操作就能够自动保存相关数据信息,以便于计算位置坐标并实现定位。GPS 测量技术的这项优点也极大地提升了工程的工作效率。
2.3 测量定位结果精度较高
GPS 测量技术是基于GPS 技术原理开展工程测量工作,及时只有一个卫星将信号传送给相应的接收机,也能够实现高精度定位。在实际工程测量当中,由于GPS 技术的卫星覆盖范围较广泛,也就是说GPS 接收机可以接收到许多卫星发来的数据信号,这更加提高的定位数据精度。测量人员还需在大量数据信号中通过判定与筛选的方式提取可靠信号,同时对许多卫星测量信号进行计算时,也要将误差控制在1mm 范围内,这对于一些定位精度要求颇高的工程来说较为适用。此外,运用GPS 测量技术还可以不考虑观测点之间的透视,这也会提升测量工作的可操作性及流畅性,因此,该项技术在工程测量中具有很高的推广价值。
3 工程测量中GPS 测量技术的应用技术形式
3.1 测量控制网的建立技术
在工程施工期间开展工程测量工作,施工单位应当预先做好完善的准备工作,委托专业的测量队伍借助于GPS 测量技术的优势开始进行测量,然后再根据测量数据结果来进行施工方案的基础设计,提升建设工程的质量。先是对GPS测量技术的相关参数进行确定,一般情况下,基于GPS 测量技术的观测计划中,关键性参数包含了整体基准、设计精度以及网形测量。在设计精度方面,结合实际情况与工程需求,在设计的测量区域内构建GPS 网作为首席控制网,该控制网中通常需要12 个精准测量点,其边长不能够过长,否则可能会影响到GPS 控制网实施控制,但边长也不能够过长,否则会将GPS 控制网的实际控制范围缩小,那么后续的测量工作会更加困难。在整体控制网当中,平面方向控制点数量为2 个,高程的控制点数量为5 个,观测过程中的所有接收机同时运转,让控制网边界呈现边连式结构,GPS 测量技术下具有的预报图也可提升控制网的效果,还能够判断最适宜进行测量的时间,从而调整实际测量作业的安排。测量控制网观测点的选择是重中之重,其合理性会影响到整体测量控制的精准度,为此需进行科学选取,根据GPS 技术的特点可知,实施测量时的测站不需要实现透视形式,因而观测点的选择十分灵活,具体而言要遵循几项基本原则:一是观测点位置附近不可具有微波站或是处于电视台所处区域,否则电磁波信号的传输会受到不良干扰,影响到测量准确度,若是周围存在超过20 千瓦的高压电线,那么至少要保证距离超过50m,与此同时,还要保证不靠近公路,最少要在距离200米以上的位置,避免其无线发射电源的影响;二是避免靠近具有大面积水的区域,这样的区域也会影响到电磁波信号传输的稳定效果;三是保证观测位置附近没有遮挡物体,避免阻挡视线,进而影响到测量工作开展。在选择好观测点后进行科学设定,这一过程要保持遵循方便测量的原则,同时合理按照情况来设计,在整体施工期间还要保证观测点的完整性,避免人为干扰。
3.2 静态相对定位技术
工程测量中的GPS 测量技术广泛运用的形式之一就是静态相对定位技术,而该项技术实施具体还分为两种类型:其一是GPS1+N 相对定位模式,其二是常规静态测量定位模式。对GPS1+N 相对定位模式进行分析,先是要确定2 个或以上数量的已知点,然后开展定位处理,将其中一台GPS 的接收机设备当作是基准站,其余的接收机设备则作为移动站,控制好移动站和基准站之间的相对位置关系,并结合已经获得的两个点位确定绝对位置。比如说GPS1+N 相对定位模式可以在一定的测绘范围内实现快速地形测量,方便于工程的放样作业,相比于常规测量具有高精度、速度快、可操作性强的优点,而不足之处则在于可控制测量的范围都是围绕着已知点,具有一定局限。对常规静态测量定位模式进行分析,其是指基于3 台或是以上数量GPS 接收机完成的测量作业,先是构建已知点的坐标,然后实现4 颗GPS 卫星以上的 同步测量,基线端点的位置保持不动,但需基于基线长度参数以及实际观测等级,一般可以保持的观测时间超过45min,尽可能延长了观测时段,也提升了效率,这种形式需要GPS 接收机设备全部同步运转,还要保证接收机设备周围环境符合要求。在一些变形监测领域以及精密工程当中,GPS 的静态相对定位还需基于载波相位算法,同时可采用卡尔曼滤波算法来降低误差,获得精度较高的定位结果,GPS静态相对定位技术也可与BDS 技术结合运用,构建出双系统观测模型,进一步提升精度。图1 为静态相对定位的基本观测量图。

图1 静态相对定位的基本观测量图
3.3 RTK 测量技术
RTK 测量技术也是十分先进的,其特点是结合了GPS 技术及数据通讯技术的优点,目前该项技术被广泛运用于建筑工程测量工作中。工程测量的RTK 测量系统通常是包括3项关键部分,即进行传输数据的装置、综合软件系统以及接收GPS 信号的设施。数据传输的设施还包括了流动站与基准站功能电台,在该设施的作用下可以实现动态化实时测量,然后使用相应软件结合一定算法来计算流动站的实时坐标参数。应用RTK 技术也会体现出GPS 测量技术的一些优点,比如在进行动态定位时,可以借助于静态型快速测量手段,则可以保证范围为15km 情况时,定位精度误差在1-2cm 范围之内,有效控制测量。例如,采用RTK 技术来进行地形图测绘工作,基于基准框架网点的构建,搭设各部分GPS 基准站,然后采用1+2 的作业模式,流动站取2 套GPSRTK 接收机设备,那么其系统在发射电台时需要4w,若连续作业,能维持1 天的使用,首次进行流动站测量时,将已知点作为依据,然后将RTK 测量结果与已知点进行对比分析,检查坐标结果的输入是否准确,最后将GPS 测量所获取的数据处理完成后录入到计算机系统,结合数据信息开展地形图绘制,精准度较高。基于RTK 测量技术还可进行像控点测量,这也是外业测量的主要工作,运用传统的方式通常需要布置大量导线,以此来获得平高点信息,还需进行加密处理,但RTK 测量技术只需要在一定的测区内或是测区的周围设置高等级控制点的基准站,而流动站也可直接对像控点的高程坐标和平面坐标开展测量,有效达到像控点测量的精度要求,相比于静态的GPS 测量方式,这种作业方法功效大大提升,提升效果约为3-5 倍,促进作业效率的提高。GPS-RTK测量系统进行工程测量时的作业过程为,运用海达5800 的GPS 测量设备,对基准点的选择以精度高为标准,先进行试用试验,针对仪器特点,先确定流动站功能覆盖的范围,通常不会超过4 千米,只要在该范围区域内,就能保证基准站的信号数据被有效接收,然后再构建GPS 技术的立体控制网,在该控制网内选择四个点,构成基准框架网,然后结合坐标系参考资料来进行坐标参数转换。此外,GPS-RTK 测量系统在实际运用前,需对其定位的准确性开展判断试验,确保满足实际需求,先是测量获取5”级控制点,设置13 个左右的E级控制点,这样就可以测量获得5”级控制点的实际坐标,最终获得测量平差结果。图2 表示的是RTK 测量数据的获取步骤。
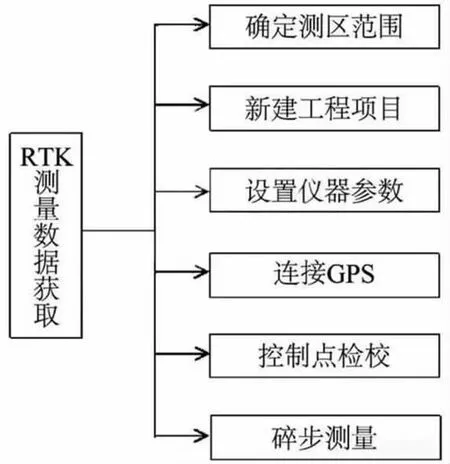
图2 RTK 测量数据的获取步骤
3.4 动态相对定位技术
在工程测量中,动态相对定位技术往往应用于具有移动物体的系统中,该项技术的原理是,实施测量时将收发装置安装于移动的物体上,然后借助于GPS 技术来进行测量,当物体开始移动时,就可获得相应的位移参数、速度参数以及加速度参数,而移动站会接收到基准站发出的信号,从而进行基站数据信息处理,获得准确的待测数据位置。动态相对定位借助于固定的观测点来安装GPS 接收机,对于观测卫星要进行同步,其基准接收机将会实施瞬时测量,而基准站的终于坐标是已知的,两项结果可进行对比,即可获得瞬时校正值,该项校正值数据还会被用于对移动接收机的瞬时测量值实施改正,获得移动站相对于基准站的精准瞬时位置,其基准站和流动站之间存在着良好的通讯链。图3 为动态相对定位的基本观测量图。工程测量的动态相对定位技术主要是应用在几个方面:一是放样阶段,使用全站仪和棱镜设施进行配合,同时安排多名专业测量人员,而测量点与放样点之间需保持通视状态,若是测量控制点较缺乏,可进行引导操作;二是在地籍测量阶段应用,动态相对定位可精准获得地籍图的测点以及权属界址点,通过GPS 技术获取到信息后会直接录入到相应系统中,进而快速获得精度较高的地籍图。
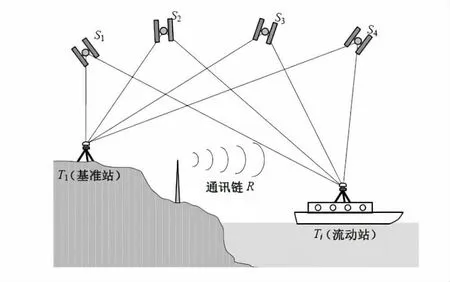
图3 动态相对定位的基本测量图
通过对图3 的分析,若是基准站位置接收到瞬时间的校正值,然后将该数据传送到流动站接收机上,主要是借助于通讯链R 来输送,就可以校正流动站上的瞬时参数,进而获得两个位置Ti以及T1的坐标参数,那么这种动态相对定位也叫做实时差分动态定位模式。还有另一种情况是,基准站与移动站之间并不通过通讯链来传送实时数据,而是待到相对定位观测完成后,将流动站和基准站的接收设备采集数据结合起来,统一进行处理,也就是测后联合处理定位,被称为后处理差分动态定位模式,也能够对移动站的实时位置进行解算。根据动态相对定位测量的对象不同(主要是包括载波、伪随机噪声码两种信号),将该定位手段分为两种形式:其一为测相伪距动态相对定位形式,其二则是测码伪距动态相对定位形式。再结合动态相对定位的特点,实际接收信号时,对一些误差可以有效降低,因此定位的准确性是比较高的,像是采用测相伪距动态相对定位形式,若是实际测程不超过20km,那么其测量定位精度级别可达到厘米级,这里所提到的精度也是单个观测历元来说,由此可见其技术的作业效率颇高,因而也实现了广泛运用。
4 结论
综上所述,大部分工程建设过程中,测量工作都是重点,为了保证测量结果更为准确,GPS 测量技术得到了广泛运用。由本文分析可知,工程测量中GPS 测量技术的应用技术形式包括:测量控制网的建立技术、静态相对定位技术、RTK测量技术、动态相对定位技术。
