下沉式钻台机械手研制与应用
2022-04-02赵亮亮王耀华马升平
赵亮亮,王耀华,马升平,付 华,严 亮,张 洪
(1.中油国家油气钻井装备工程技术研究中心有限公司,陕西 宝鸡 721002;2.宝鸡石油机械有限责任公司,陕西 宝鸡 721002; 3.中国石油集团川庆钻探工程有限公司,成都 610051)
自动化钻机是当前石油钻井装备发展的方向,更是改善现场作业环境、提高钻井作业效率、减轻劳动力强度、提升装备自动化水平的有效措施[1-7]。
目前,常规钻机的立根排放通过二层台井架工(或者二层台机械手)和钻台面钻工的配合来完成,少许钻机通过在钻台面安装简易的机械臂辅助钻台面钻工进行立根排放。通过分析常规的作业方式可以看出,钻井过程中钻台面的立根排放是一项劳动强度大、任务繁重、作业环境恶劣的工作。现有的钻台面立根排放设备具有如下缺点:
1) 受制于钻机形式的限制,陆地钻机的钻台面空间较小,各设备布局十分紧凑,造成现有的钻台面立根排放设备安装位置相当受限,而且经常与其它作业发生干涉,这时为了保证钻井作业正常进行不得不将钻台面立根排放设备拆除,这样既影响作业效率,又为设备的连续可靠运行带来了隐患。
2) 现有的钻台面立根排放设备功能单一,仅用于立根排放,不能替代人工完成钻井过程中其它的工作任务。
3) 回转角度受限。在回转机械限位或程序保护失效的情况下会产生重大安全事故,而且作业范围有限。
针对当前钻井作业流程的特点和一些钻台机械化设备的缺点,创新性地进行了钻台机械手的功能集成设计和满足避让立根台通道要求的设计。该设备采用机、电、液相结合的技术实现钻台面管柱处理自动化,使用过程中根据不同作业工况要求可通过偏移和下沉动作,简单快捷地实现作业空间避让,对提高钻机自动化水平具有现实意义。
1 技术分析
1.1 结构组成
钻台机械手主要由扶持钳、副臂、短调平连杆、伸缩油缸、中间连杆、拉杆、长调平连杆、主臂、液压系统、电控系统、升降机构、回转座、回转马达等组成,如图1所示。

1-扶持钳;2-副臂;3-短调平连杆;4-伸缩油缸;5-中间连杆;6-拉杆;7-长调平连杆;8-主臂;9-液压系统;10-电控系统;11-升降机构;12-回转座;13-回转马达。图1 钻台机械手结构
1.2 工作原理
1) 作业原理。
钻台机械手是一种用于推扶管柱下端,实现管柱在立根台、井口、鼠洞、大门坡道之间递送的自动化设备。采用远程自动控制液压马达、油缸实现机械臂的旋转、伸缩,结合传感器检测技术,确保扶持钳准确、可靠地抱合钻柱立根下端,完成推扶作业,如图2所示。
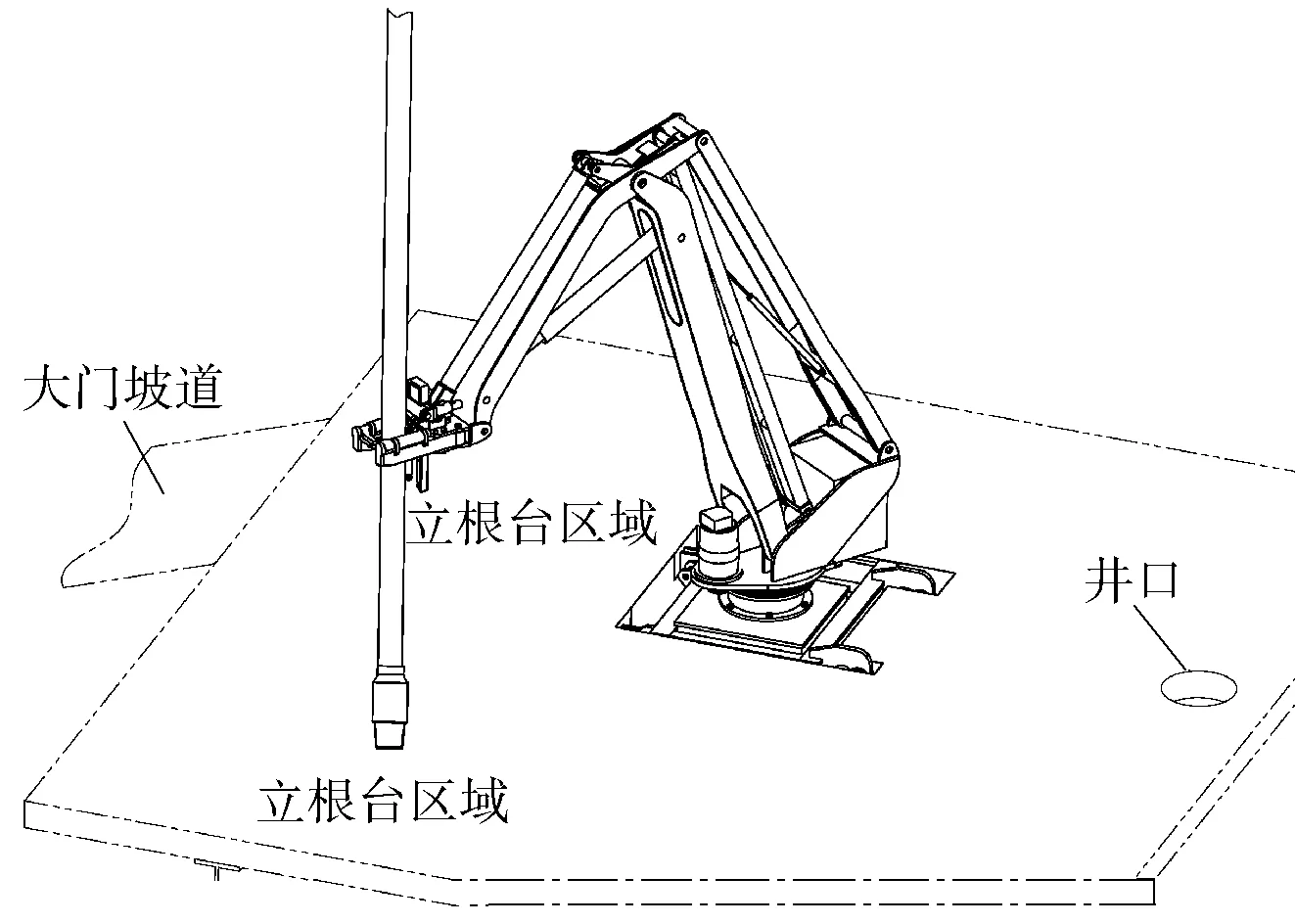
图2 钻台机械手工作过程
2) 偏移避让立根台通道原理
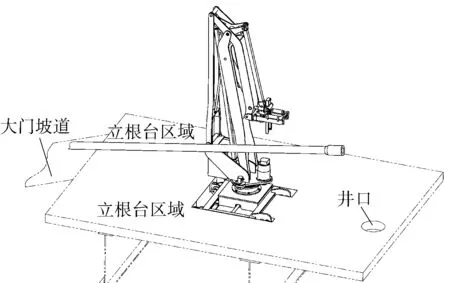
图3 钻台机械手偏移避让通道
3) 下沉避让立根台通道原理

图4 钻台机械手下沉避让通道
1.3主要技术特点
1) 具有立根排放、单根扶持、井口和鼠洞对扣等功能,可减少钻台面钻工数量。
2) 钻台机械手可通过行走装置进行偏移,让开井口中心线,以避让钻台面大门坡道上下尺寸相对较小的钻杆、钻铤,利于测井等作业。
3) 当立根台通道需要移运尺寸相对较大的套管时,钻台机械手本体可通过翻转机构下沉隐藏在立根台里面,确保立根台通道无障碍。当需要进行立根排放或单根扶持时,钻台机械手本体可通过翻转机构上升至钻台面以上进行工作。
4) 当钻机搬家运输时,钻台机械手本体可通过翻转机构下翻隐藏在立根台中跟随立根台一起运输,减少了拆装工作量和运输车次。
5) 双平行四边形机械臂有效地保证了扶持钳在伸出范围内任意位置均处于水平状态,具有工作可靠性高的优点,而且通过合理地布置拉杆两端的铰接点位置,将扶持钳在伸缩过程中的高度变化差值降低至50 mm以内,保证了管柱处理的精度。
6) 回转装置设有液压旋转接头和电滑环,可以保证设备连续旋转,回转角度不受液压胶管和电缆的限制,有效避免了在机械限位或程序保护失效的情况下产生的重大安全事故。
7) 自动化程度高。通过传感检测技术和智能控制技术实现了设备的一键式操作要求,管柱处理过程自动化。
8) 操控模式多样化,适应不同的操作需求,具有司钻房操控模式、无线遥控器操控模式和本地阀体应急操控模式。
1.4 主要技术参数
扶持管柱直径
ø73~ø248 mm
最大作业半径
3 400 mm
最小作业半径
700 mm
回转角度
360°
回转速度
3 r/min
2 动态特性研究
钻台机械手在工作过程中面对的管柱类型比较多,运行轨迹比较复杂,不同工作位置上的负载也不相同,因此有必要对其进行动态特性研究。
应用动力学仿真软件ADAMS对钻台机械手进行仿真分析,首先通过UG软件建立设备的三维模型,其次经过x_t文件格式导入动力学仿真软件ADAMS,然后根据实际运动情况对模型施加约束、载荷、驱动等参数[8-15]。
2.1 机械臂伸缩与回转动态特性分析
钻台机械手在工作过程中通过机械臂的伸缩和回转实现扶持钳的位置变化,进而将管柱下端扶持到目标位,在作业中机械臂的伸缩和回转机构参与的作业工况有2种:①配合二层台机械手按照推扶模式完成钻杆立根排放;②配合二层台机械手按照推扶模式完成钻铤立根排放。其中作业工况①下钻杆立根的负载要比作业工况②下钻铤立根的负载小很多,因此这里只对作业工况②下的机械臂伸缩和回转进行研究。
1) 作业对象。
2) 作业流程。
3) 仿真结果。

图5 回转力矩仿真结果界面
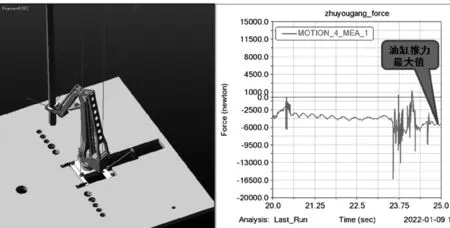
图6 伸缩油缸推力仿真结果界面
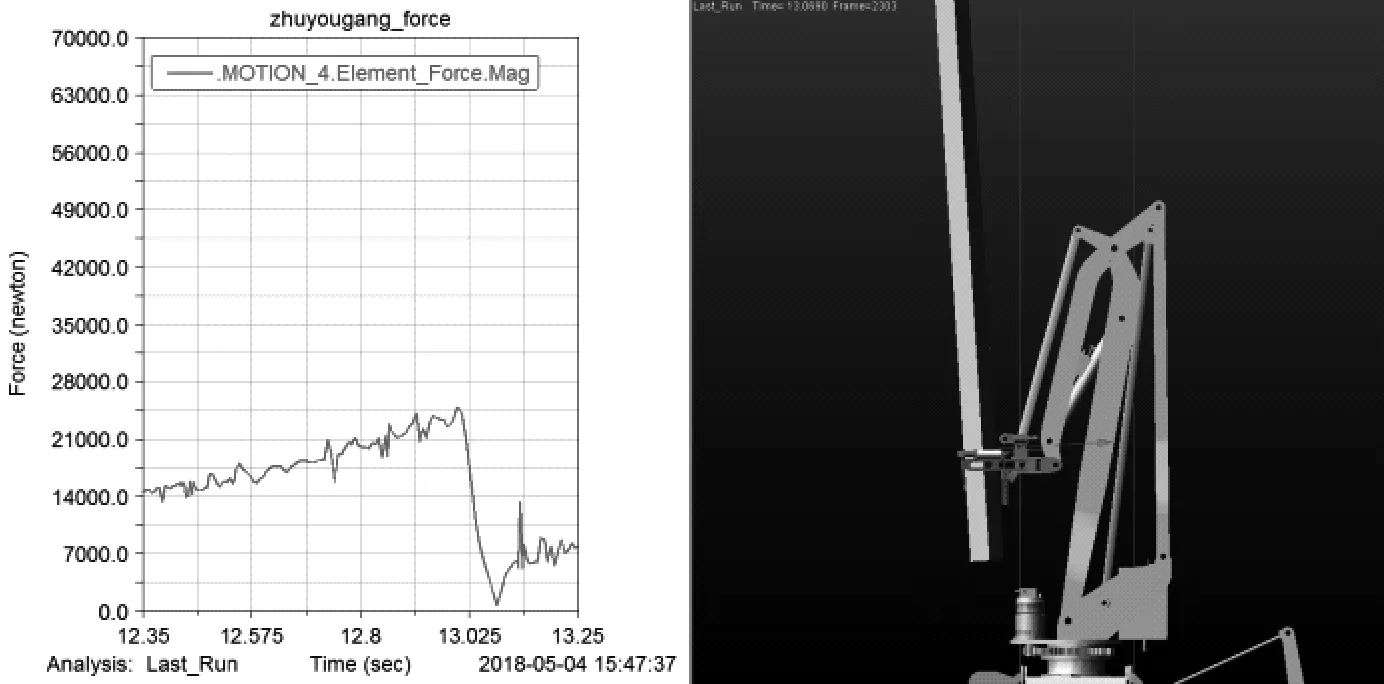
图7 伸缩油缸拉力仿真结果界面
2.2 升降机构动态特性研究
钻台机械手升降机构实现了设备自身在钻台面的上升和下降,该机构工作时主要承受设备的自重力,在升降过程主要靠升降油缸提供动力。
1) 作业对象。
钻台机械手本体。
2) 作业流程。
钻台机械手从钻台面工作位置下沉至钻台面以下,以及从钻台面以下上升至钻台面工作位置。
3) 仿真结果。
通过仿真分析可得,钻台机械手到达最终起升位置时升降油缸所受推力为32 487 N,如图8所示。

图8 最终起升位置时升降油缸推力仿真结果界面
通过仿真分析可得,钻台机械手在初始起升位置时升降油缸所受推力为23 215 N,如图9所示。

图9 初始起升位置时升降油缸推力仿真结果界面
通过仿真分析可得,钻台机械手在中间起升位置时升降油缸所受推力最大,为35 000 N,如图10所示。

图10 中间起升位置时升降油缸推力仿真结果
通过对钻台机械手上述关键动作的动态特性研究,掌握了不同作业工况和作业流程下执行机构的动态负载变化情况,可作为指导执行机构的选型和计算依据。
3 现场应用
从2018-12至今,该下沉式钻台机械手配套于中油油服公司的5 000、7 000 、8000、9 000 m自动化钻机,已经在大庆、长庆、四川、华北、新疆油田进行作业,设备整体运行平稳,安全可靠,提高了作业效率。某台下沉机械手现场应用如图11所示。

图11 钻台机械手现场应用
1) 功能得到验证。经过现场试验,该钻台机械手自动去井口、自动去鼠洞、自动复位、一键排管、偏移、下沉等功能得到了验证。
2) 可减少操作人员。每个生产班减少钻工1人。
3) 提高作业安全性。通过司钻房操作或者远程无线遥控器操作,使作业人员远离高危作业区域,最大限度地降低了作业风险。
4) 改善作业环境。司钻房内的操作在很大程度上降低了操作工身体上来自泥浆、寒冷、酷热、强风、暴雨等恶劣环境的伤害。
5) 减轻钻工的劳动强度。管柱处理由人工操作变为机械化和自动化,降低了钻工的劳动强度,体现了以人为本的理念。
4 结语
钻台机械手的成功研制与应用为当前钻井装备的升级和钻井作业自动化水平提高提供了有力支持。面对国外钻井装备的持续创新和国内智能钻机的发展需求,建议钻台面管柱处理设备从如下几个方面持续开展研制工作。
1) 钻台设备应充分考虑井架及钻台面相对空间较小、需频繁拆卸搬家等陆地钻机特征,需要设计方便钻机配套,易于安装、拆卸、运输的系统设备。
2) 当前新制陆地钻机基本实现了管柱作业机械化,部分设备达到了半自动化。为了进一步提高管柱作业效率、自动化程度和安全可靠性,后续应该开展钻台设备的一键操作、轨迹规划、识别定位、智能检测等技术研究。
3) 开展石油钻台机器人研制工作,突破石油钻台机器人智能、精确、稳定操作瓶颈,实现钻台机器人与常规石油钻台设备集成智能联动应用,提升我国石油钻井装备技术水平。
