加权整体最小二乘坐标匹配算法在机场道面测量中的应用
2022-04-02戴中东孟良高永攀项
戴中东孟 良高永攀项 伟
1空军研究院工程设计研究所,北京,100068
2北京特种工程设计研究院,北京,100028
机场道面高程图(也称为板角高程图)测量一般在机场改扩建设计前或者机场建设竣工后进行。板角高程测量精度至毫米[1],一般尾数为估读,且板角点相对临近水准点高程中误差不大于5 mm,极限误差不大于1 cm,因此可认为,板角高程测量的精度要求优于1 cm。传统的测量方法将平面数据和高程数据分开进行采集,然后一一对应合并(一个机场大概3万个数据),过程繁琐,工作效率低下,且很容易出现错误。地面三维激光扫描仪(terrestrial laser scanner,TLS)发展已经30多年,特别是近10年来,精度高、测速快的扫描仪已经逐渐走进各个应用领域[2],比如工程测量[3]、文物保护[4]、工业测量[5]、交通道路测量[6-8]等,极大提高了工作效率。
但根据机场道面高程测量中的精度要求,采用常规扫描仪流程,主要存在以下3个主要问题:一是靶标控制点的高程精度要足够高,且测量过程中需要尽量减少“量高误差”;二是由于道面测量对平面精度和高程精度要求不一致,特别是扫描仪没有整平装置时,平面坐标误差会影响高程匹配的精度,且配套软件没有对权值进行设定;三是由于机场周边地势平坦,且无连续制高点,距离仪器越远,道面测量点的反射角就越小,大于70 m几乎就没有回波数据,这样就使得相邻测站的距离不能太大。因此采用常规的三维扫描仪测量方法,不仅效率低,而且也不能满足厘米级以内的高程精度。
本文首先分析了使用加权整体最小二乘[9-11]进行坐标匹配转换的算法,该算法公式经过推导和向量化后,采用LM(Levenberg-Marquardt)算法求出最优转换参数,并对目标坐标和测站坐标的误差来源进行分析,确定了权值;其次,为了减少靶标量高误差和提高地面回波率,设计了一种控制点布设方案和测量方法;最后,通过实例数据的分析和比较,得出结论。
1 坐标匹配算法和权值的确定
1.1 加权整体最小二乘法坐标匹配算法
TLS外业测量时采用的是测站坐标系统,而目标坐标为测图时采用的坐标系统,两者之间需要转换。由于测站坐标和目标坐标均含有随机误差,直接采用经典最小二乘法求解转换参数时,求出的结果会有偏差[12]。因此需要使用变量中存在误差的EIV(errors-in variables)模型,求出最优估计参数解。从测站坐标到目标坐标系统EIV模型公式为:
式中,[XY Z]T为目标坐标向量;[Vx Vy Vz]T为目标坐标误差向量;[x y z]T表示测站坐标向量;[vx vy vz]T为测站坐标 误差向 量,[ΔxΔyΔz]T为平移参数向量;λ代表尺度缩放参数,TLS的坐标转换中,一般认为λ等于1;M为3个旋转角组成的旋转矩阵。

根据式(1)、式(2)可以得出:

由式(3)可以看出,在仪器整平的情况下,εx、εy为小角度,sinεx、sinεy也为极小值,cosεx、cosεy接近1,这时,目标坐标高程主要与测站坐标的z方向坐标分量、误差、平移参数相关。但是,TLS一般没有整平装置,这时,目标坐标高程与测站3个坐标分量以及误差、平移参数均相关。
由式(1)、式(2)可以看出旋转参数和系数矩阵呈非线性关系,无法直接使用整体最小二乘算法求解,一般将式(1)转换成线性化的模型求解,但该方法仅仅适合于两套坐标系间的旋转角较小时的转换,若旋转角较大时,模型误差会很大,甚至完全得不到正确的结果[13,14]。
将式(1)和式(4)联立,坐标转换模型转化为非线性GM模型:

式中,l为式(1)和式(4)中目标坐标和测站坐标的向量化;V为误差的向量化。假设A为测站坐标系统的n个坐标,βc为6个坐标转换参数,vec表示逐行向量化,则变量参数β可表示为:

其中,f(β)为式(1)和式(4)联立后的方程的右半部分。
经过向量化变化后,式(5)转换为非线性方程的最优化问题,加权整体最小二乘的最优估计的函数可表示为:

式中,P表示权值。
对于非线性方程的最优化问题,常见的方法有梯度法和高斯牛顿法。梯度法主要从负梯度方向进行迭代搜索,并最终找到极小值,该方法开始时下降较快,但靠近极小值时收敛速度很慢。高斯牛顿法中由雅克比(Jacobian)矩阵近似计算海森(Hessian)矩阵,避免了直接计算海森矩阵的复杂性,收敛速度快,但是该算法对初始值较敏感,容易陷入局部极小值。LM算法引入阻尼因子[15],每次迭代时调节阻尼因子μ,使算法介于梯度法和高斯牛顿法之间,能有效克服常见缺点。对于本文的加权非线性方程的求解中,在梯度向量G和海森矩阵H更新时需要加入权值项。
每一次迭代时,h表示β值的更新值:

当梯度的无穷范数小于预定的一个极小值ε1,或者通过更新值h和变量参数的2-范数进行比较,当小于变量参数的一个极小比例ε2时,程序找到非线性最小二乘的最优解β,由式(6)可知,解的前6个值就是旋转角和平移量参数。本文中ε1、ε2均设置为1×10-10。
1.2 权值的确定
机场道面很平整,横坡和纵坡最大也不超过2%[16],即平面偏差5 cm,对高程影响也就1 mm。为了保证高精度的道面高程测量成果,同时又提高效率。靶标控制点的平面坐标使用GPS-RTK采集,高程则使用二等水准进行测量。道面测量采用RIEGL VZ-1000三维激光扫描仪(角度分辨率1.8″,小于100 m距离的测距精度5 mm),是一款高密度、高精度、高效率的扫描设备。
目标坐标系统下靶标点的测量误差分为平面和高程两个部分。由于平面坐标由GPS-RTK采集,有固定误差,对中杆手握对中以及其他因素引起的偶然误差,要准确计算每一个点的平面误差比较困难。由于机场环境空旷,高度角大于15°的卫星一般都能接收到信号,本文计算中统一设置为2.1 cm中误差(两个坐标分量都是1.5 cm的中误差)。由于电子水准仪的普遍应用,水准测量的效率和精度都得到了很大提高,有的仪器甚至已经达到了0.2 mm/km的高程中误差,本案例的控制点采用二等水准测量,平差后高程中误差为0.6 mm,加上放置靶标的误差后,统一设置为2 mm。
测站坐标系统是扫描仪外业测量时采用的坐标系统,靶标位置在该系统的误差包括两部分:一是仪器的测量误差,另一个是靶标识别的误差。其中在测站坐标系统下,如图1所示,仪器的观测量为:水平角α、垂直角θ、以及斜距S。则仪器的测量中误差在3个方向上分别为[17]:
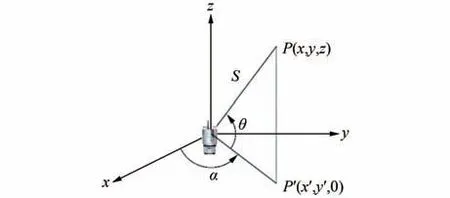
图1 测站坐标示意图Fig.1 Schematic Diagram of Station Coordinate

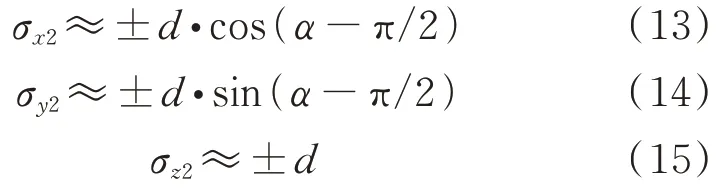
靶标识别误差主要和靶标上的点云密度有关,扫描仪道面扫描时使用的是6 cm×6 cm的平面靶标,放置在10 m位置时约有6 000个点,点间距约为0.8 mm;放置在120 m位置时就只有200个点,点间距约为4.2 mm。虽然扫描仪没有对中和整平装置,但是一般情况下,扫描仪在测量时基本保持水平,本文中将靶标识别误差设定为点间距σxy≈σz2≈±d,其中x、y代表水平方向,即使用随机软件RiSCAN中的点云个数求出各靶标的点间距后,将水平方向的误差、垂直方向的误差设定为点间距。
如图2所示,x、y、z方向的识别误差分别为:
图2 靶标误差平面投影Fig.2 Plane Projection of Target Error
测站坐标的3个方向总误差分别为:

目标坐标和测站坐标的误差都计算出来后,就可以对整体最小二乘的权值进行确定,pi=σ02/σi2,其中σ02可以选定为σi2的最大值。权矩阵可表示为:

式中,diag代表生成对角化矩阵的符号,即将向量的成员作为矩阵对角线上的元素。这样,权值即可确定。
2 实例数据采集和分析
2.1 数据的获取
机场道面周边无连续制高点,数据采集时使用专用脚架提高仪器的架设高度。普通脚架只能把仪器高度架设到1.5~1.7 m,使用工业级的专用脚架,把仪器高度架设到2.6~3.0 m。提高仪器高度,不仅可以测量得更远,提高效率;同时,由于反射角的增大,反射率增加,也提高了测量精度。
如图3所示,将靶标贴在平整长方体一面,直接将靶标的投影中心对准控制点平面中心,放置在控制点的最高处,靶标面朝向仪器中心,优点在于避免了过大的对中误差和量高误差。需要注意的是,匹配该靶标点的高程应该为控制点高程加上3 cm(平面靶标的一半尺寸),平面坐标不变。

图3 架设仪器和放置靶标Fig.3 Instrument Erection and Target Placement
靶标布设时要分布均匀,且避免靶标点共线和共面的情况,防止坐标匹配时无穷多解的情况。待匹配的靶标点布设在道面两边线外的助航灯基座螺母上,航灯的间距约为50 m,跑道宽度一般和机场等级有关,多数为45~60 m,如图4所示。一个测站可以扫描12个靶标,其中8个在本测站扫描范围内,另外4个在范围外附近。机场道面测量时,将扫描仪架设在跑道中心线上,为便于相邻测站的结果进行检核,使后一测站的点云和前一测站有重叠,使测站重叠区域离相邻测站的最大距离在100 m左右。

图4 靶标点布设示意图Fig.4 Schematic Diagram of Target Placement
2.2 分析和比较
实验1:采用8种坐标匹配方案,比较各种方案的匹配精度,具体匹配方案和匹配精度如表1、表2所示。

表1 坐标匹配方案Tab.1 Coordinate Matching Scheme
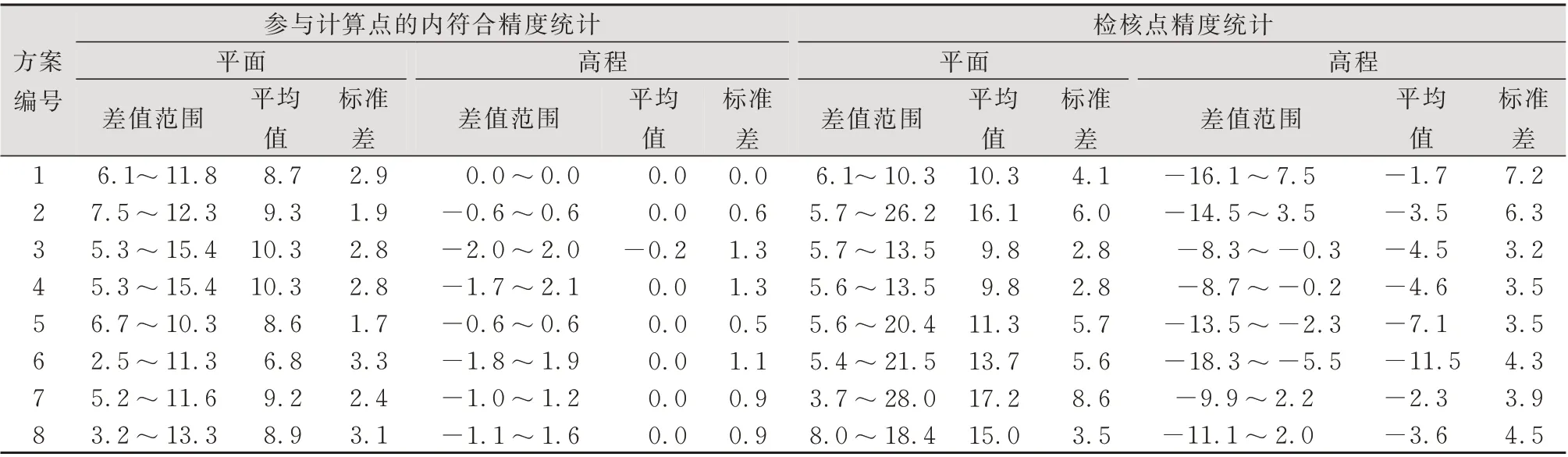
表2 坐标匹配精度统计比较/mmTab.2 Statistical Comparison of Coordinate Matching Precision/mm
在表2中,方案1只有必要的3个点参与参数计算,没有多余点,无法平差,虽然内符合精度很高,但从检核点的精度统计可以看出高程的差值范围很大,标准差最大,证实了采用本文算法的必要性。
由于EIV模型把误差作为变量进行平差,考虑了目标坐标系统中存在误差,所以在参与计算点的内符合精度统计中,方案3和4的高程差值标准差比较大,但是检核点的高程标准差最小。方案3的检核点高程精度最高,平面精度符合实际RTK测量的情况,因此8个临近的点的参数估计最稳定。方案4的整体精度和方案3相近,也符合式(3)的εx、εy为小角度的情况。
方案5~方案8为匹配点在一侧的情况,另一侧的检核点高程出现较大的偏差,这是由于靶标分布不均匀造成的,这个结论也符合文献[18]的结论。方案6、方案8使用了两个近130 m的靶标,靶标的分辨率过低引起这两个方案的高程整体精度不如方案5和方案7。
实验2:TLS多数没有整平和对中系统,仪器的坐标平面和目标坐标平面产生夹角在所难免,主要体现在以坐标x轴和y轴发生旋转,本文假设产生0~10°的旋转,使用测站周边的8个点作为参数计算点,剩下的4个点作为检核点,对不加权和加权进行比较。
如图5所示,等权的情况下,参与计算点的内符合高程转换差值的标准差在1.3~1.8 mm之间,检核点的高程转换差值的标准差在3.5~5.5 mm之间。不论是内符合还是检核点的精度,都随着旋转角的加大而增加,最大的情况出现在x轴和y轴同时旋转10°的情况。可以看出,在2°旋转角的范围内,高程的转换误差还算稳定,也就是旋转角度较小的情况。
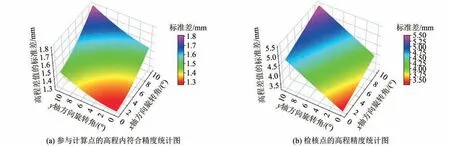
图5 等权情况下的精度统计图Fig.5 Precision Statistical Diagram Under Equal Weight
如图6所示,加权的情况下,参与计算点的高程差值的标准差非常平稳,保持在1.3 mm,检核点的转换差值标准差也较稳定,保持在3.5~3.7 mm。对比图5、图6可以看出,符合式(3)的推导,即没有整平装置时,目标坐标高程和测站3个坐标分量以及误差、平移参数都相关的结论。加权的情况下保持着等权差值的最小值,并非常稳定,说明了该算法具有通用性和强壮性。
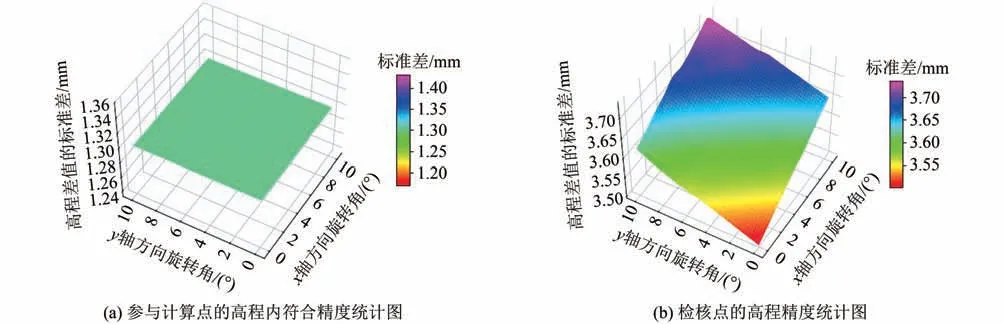
图6 加权情况下的精度统计图Fig.6 Precision Statistical Diagram Under Weighted
由于两站重叠部分的点云距离两测站都最远,该处的扫描精度最低,外业时使用常规的方法(水准仪)抽样测量了几个测站重叠部分的高程,共计119个点,与TLS点云过滤分类后的结果进行比较得出,差值范围在-12.1~8.7 mm之间,大于1 cm差值的点只有3个,且都位于道面边缘处,是源于该处有覆土或者植被的影响,所有差值的均值为2.2 mm,差值标准差为±4.6 mm,也就是精度优于1 cm,可以认为本文的方法完全能满足机场道面测量的要求。
3 结束语
本文分析了加权整体最小二乘算法的理论和实现方法,并且对TLS的目标坐标系统和测站坐标系统误差进行了分析确定,并针对某机场实测的数据进行计算比较,得出结论:由于测量效率的需要,匹配点的目标坐标采用不同的设备采集,这样就需要使用加权整体最小二乘法进行转换参数的求解,这样才能得到最优的参数估计,并有效减小三维激光扫描仪不能整平带来的误差。同时在高精度的道面高程测量的应用中,采用此方法可以有效的提高高程精度,最终达到优于1 cm的高程精度要求。
传统方式测量一个机场的板角高程需要4人(一名观测员、一名记录员、两名跑尺员),15 d左右才能完成工作。采用本文方法只需要3人(两名仪器操作员,一名靶标摆设人员),3 d就可完成同样工作。无论从人力需求上还是工作效率上都明显得到了提高,而且避免了传统方式平面和高程分开采集,最后融合易产生的错误。本文方法对于其他一些对单一方向有高精度要求的测量工程,如道路、特殊构件的平整度测量等,都有很好的借鉴作用。