加速器驱动次临界系统堆芯功率的自抗扰控制
2022-04-01张益林
郭 伟, 石 波, 张益林
(中广核研究院有限公司, 广东深圳 518000)
加速器驱动次临界系统(ADS)具有安全性高和嬗变长寿期核素能力强等优点,能够大幅降低乏燃料的放射性危害,是国际公认的最有前景的长寿期核废料安全处理装置[1-2]。但是,ADS堆芯系统具有非线性、时变和强耦合等特点,无法建立精确的数学模型,传统比例-积分-微分(PID)控制无法获得满意的控制效果。此外,相比于临界反应堆,ADS堆芯系统缓发中子数量份额小,中子代时间短,自平衡能力差[3]。为保证其安全运行,需要设计一种高性能的控制系统,以实现功率的有效控制。
目前,一些先进的控制方法已被用于反应堆的功率控制研究中,包括滑膜控制、模型预测控制和遗传规划控制等[4-6]。虽然上述控制方法能够提高控制系统性能,但其自身存在参数整定困难或控制器计算量大等问题,降低了工程可用性。
自抗扰控制(ADRC)将被控对象的模型不确定性和未知扰动归结为系统的总扰动,通过扩张状态观测器对总扰动进行估计并给予补偿,改善了控制器的适应性。此外,ADRC既能够解决PID控制快速性与超调之间的矛盾,又可以避免积分反馈的副作用。实践证明,对于非线性、不确定时滞和强耦合系统的控制问题,ADRC具有良好的控制效果[7-8]。
笔者基于自抗扰技术,设计了一种结构简单、参数整定方便、抗扰性能强的ADS堆芯系统功率自抗扰控制器。首先,以LBE-XADS次临界堆堆芯系统为研究对象,建立堆芯非线性模型,利用微小摄动理论对模型进行线性化处理,得到双输入双输出的传递函数模型。其次,基于该模型开展堆芯功率控制系统的设计和参数整定。最后,将ADRC控制与PID控制进行对比分析。
1 LBE-XADS堆芯系统模型
LBE-XADS堆芯系统由质子加速器、散裂靶和次临界堆芯构成,通过高能质子与散裂靶相互作用产生中子源并将其提供给次临界堆芯,用于维持链式裂变反应。裂变产生的核功率由液态铅铋(LBE)冷却剂导出堆芯,并送入热交换器。在热交换器内,冷却剂热量由二次侧过冷水吸收,并送往最终热阱(空冷器)。LBE-XADS堆芯系统结构见图1。
1.1 堆芯非线性模型
1.1.1 堆芯物理模型
堆芯物理模型采用带6组缓发中子的点堆中子动力学方程,同时考虑燃料和冷却剂的反应性反馈,忽略氙、碘等引入产生的慢反应性变化。点堆中子动力学方程[3]为:
(1)
(2)
式中:n为中子密度,cm-3;ci为第i组缓发中子先驱核密度,cm-3;Λ为中子代时间,s;ρ为反应性;βi为第i组缓发中子数量份额;β为总缓发中子数量份额;q为外中子源强度,cm-3·s-1;λi为第i组缓发中子先驱核衰变常数,s-1;t为时间,s。
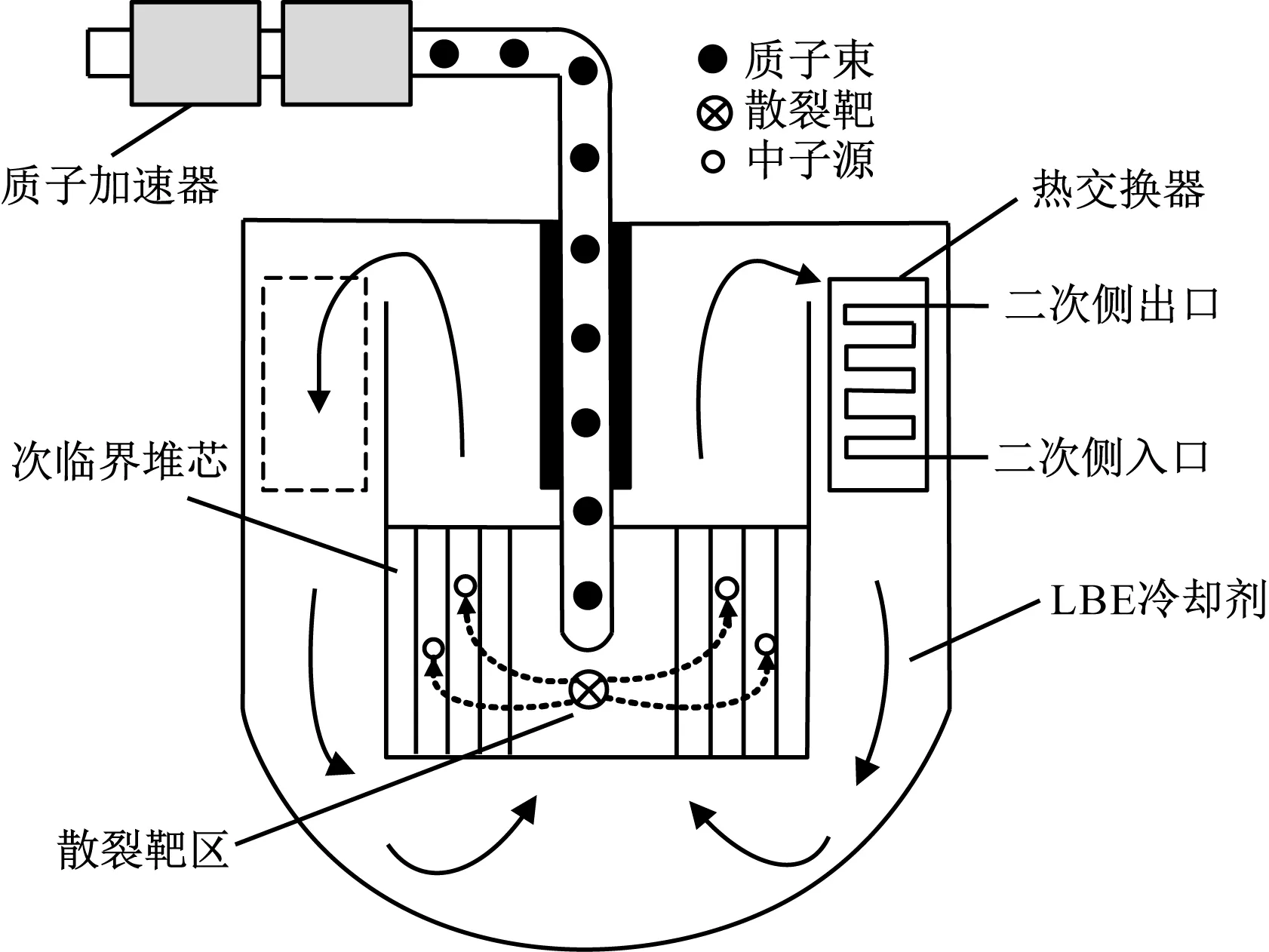
图1 LBE-XADS堆芯系统结构图Fig.1 Structure diagram of LBE-XADS core system
对式(1)和式(2)进行归一化处理,令:
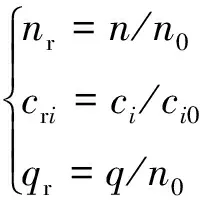
(3)
式中:nr为相对中子密度;n0为额定功率中子密度,cm-3;cri为第i组缓发中子先驱核相对密度;ci0为第i组缓发中子额定功率下的先驱核密度,cm-3;qr为相对外中子源强度,s-1。
将式(3)代入式(1)和式(2),得到归一化的点堆中子动力学方程。
(4)
(5)
1.1.2 堆芯热工动力学模型
堆芯热工动力学模型采用集总参数法进行等效近似处理。燃料采用单节点表征,将冷却剂划分成2个节点。利用冷却剂各节点出口参数表征集总参数。燃料节点和2个冷却剂节点能量守恒方程为:
(6)
(7)
(8)
式中:Tf为燃料平均温度,℃;Tin、Tc1、Tc2分别为冷却剂入口温度、平均温度和出口温度,℃;P为反应堆功率,MW;μf为堆芯燃料的总热容量,MJ/K;μc为堆芯冷却剂的总热容量,MJ/K;Ufc为燃料与冷却剂间的传热系数,MW/(m2·K);qm,c为冷却剂质量流量,kg/s;cp,c为堆芯冷却剂比定压热容,MJ/(kg·K)。
1.1.3 反应性方程
忽略毒物和燃耗的反应性反馈,只考虑慢化剂和燃料温度的负反应性反馈效应,得到总反应性方程。

(9)
式中:αf为燃料温度系数,K-1;αc为慢化剂温度系数,K-1;Tf0、Tc10、Tc20分别为初始燃料平均温度、冷却剂平均温度和出口温度,℃。
表1为LBE-XADS堆芯系统主要物理参数[9],其中Keff为有效增值系数。
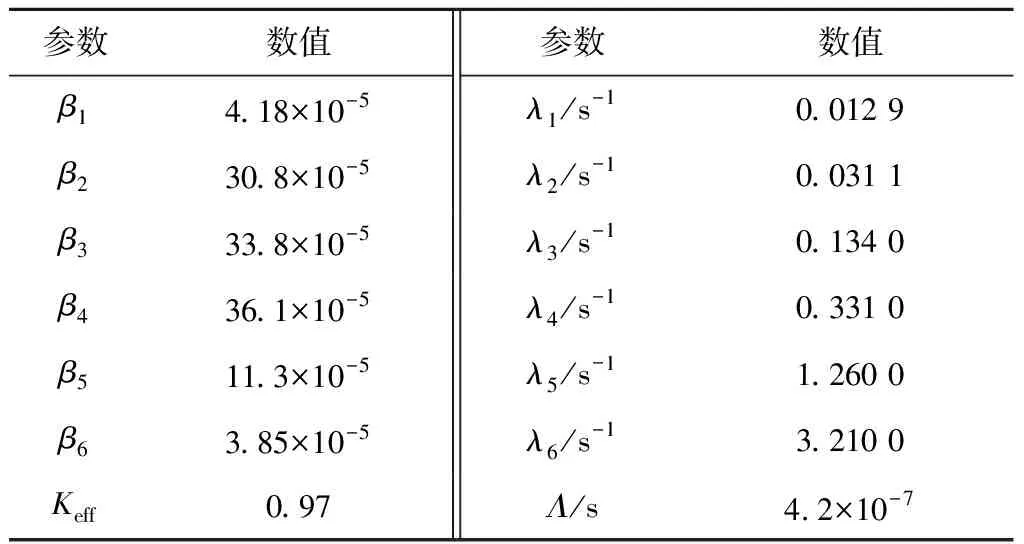
表1 LBE-XADS堆芯系统主要物理参数
1.2 传递函数模型
1.2.1 堆芯物理模型
在小扰动情况下,利用微小摄动理论对非线性模型进行线性化处理。假设在t0时刻反应堆处于稳态,此时nr=nr0+δnr,qr=qr0+δqr,cri=cri0+δcri,Tf=Tf0+δTf,Tc1=Tc10+δTc1,Tin=Tin0+δTin,Tc2=Tc20+δTc2,ρ=ρ0+δρ,其中nr0为初始相对中子密度;qr0为初始相对外中子源强度,s-1;cri0为初始第i组缓发中子先驱核相对密度;ρ0为初始反应性;δ为微小扰动量;Tin0为初始冷却剂入口温度,℃。
将上式代入式(4)~式(8),忽略高阶项δρδnr/Λ,可得堆芯线性化模型如下:

(10)
式中:P0为反应堆满功率,MW。
1.2.2 传递函数模型推导
经过线性化处理后,选取LBE-XADS堆芯系统状态变量x= [δnrδcriδTfδTc1δTc2]T;输入变量u= [δqrδTin]T;输出变量y= [δnrδTc2]T,得到双输入双输出LBE-XADS堆芯系统的状态空间形式。
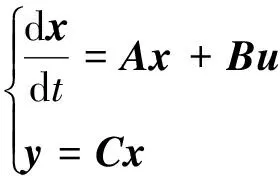
(11)


基于现代控制理论,将状态空间方程转化为传递函数形式,得到双输入双输出方程为:
(12)
式中:Gr,11、Gr,12、Gr,21和Gr,22均为对应单输入单输出传递函数。
2 LBE-XADS堆芯系统特性分析
基于LBE-XADS堆芯系统传递函数模型,分别针对外中子源强度和堆芯入口温度发生阶跃2种工况开展堆芯动态特性分析。首先,在其他输入参数不变的情况下,在第10 s时外中子源强度分别阶跃降低10%、20%和30%,归一化堆芯功率和堆芯出口温度变化见图2。由于外中子源强度阶跃降低,导致归一化堆芯功率迅速下降,引起燃料和冷却剂温度逐渐下降,由于温度的负反应性反馈,归一化堆芯功率略有回升,并在3 s内达到稳定。由于传热过程相对较慢,堆芯出口温度在40 s后达到稳定,且由于归一化堆芯功率降低,堆芯入口温度不变,外中子源强度阶跃降幅越大,堆芯出口温度降幅也越大。

(a) 归一化堆芯功率
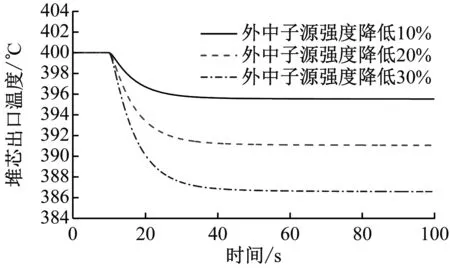
(b) 堆芯出口温度图2 外中子源强度阶跃降低时归一化堆芯功率和堆芯出口 温度的变化
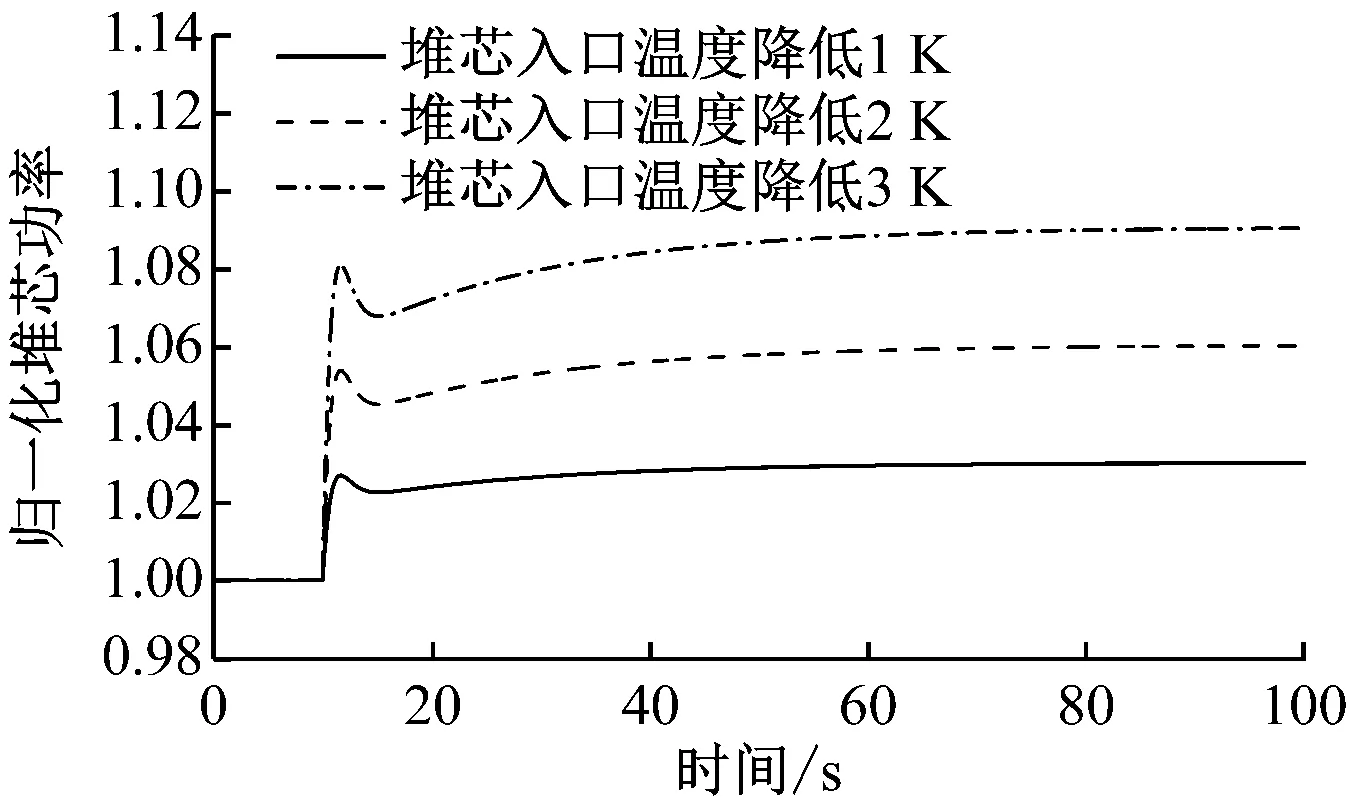
在其他输入参数不变的情况下,在第10 s时堆芯入口温度分别阶跃降低1 K、2 K和3 K,归一化堆芯功率和堆芯出口温度的变化见图3。堆芯入口温度阶跃降低,由于温度负反应性反馈作用,引入正的反应性会导致归一化堆芯功率升高,且堆芯入口温度阶跃降幅越大,归一化堆芯功率稳定时间越长。在初始阶段,由于堆芯入口温度阶跃下降,导致堆芯出口温度快速降低,而后随着归一化堆芯功率升高,堆芯向LBE冷却剂的传热量增加,堆芯出口温度开始提高。在80 s后,堆芯入口温度阶跃降低1 K、2 K和3 K时,堆芯出口温度分别稳定在399.7 ℃、399.4 ℃和399.1 ℃。
(a) 归一化堆芯功率
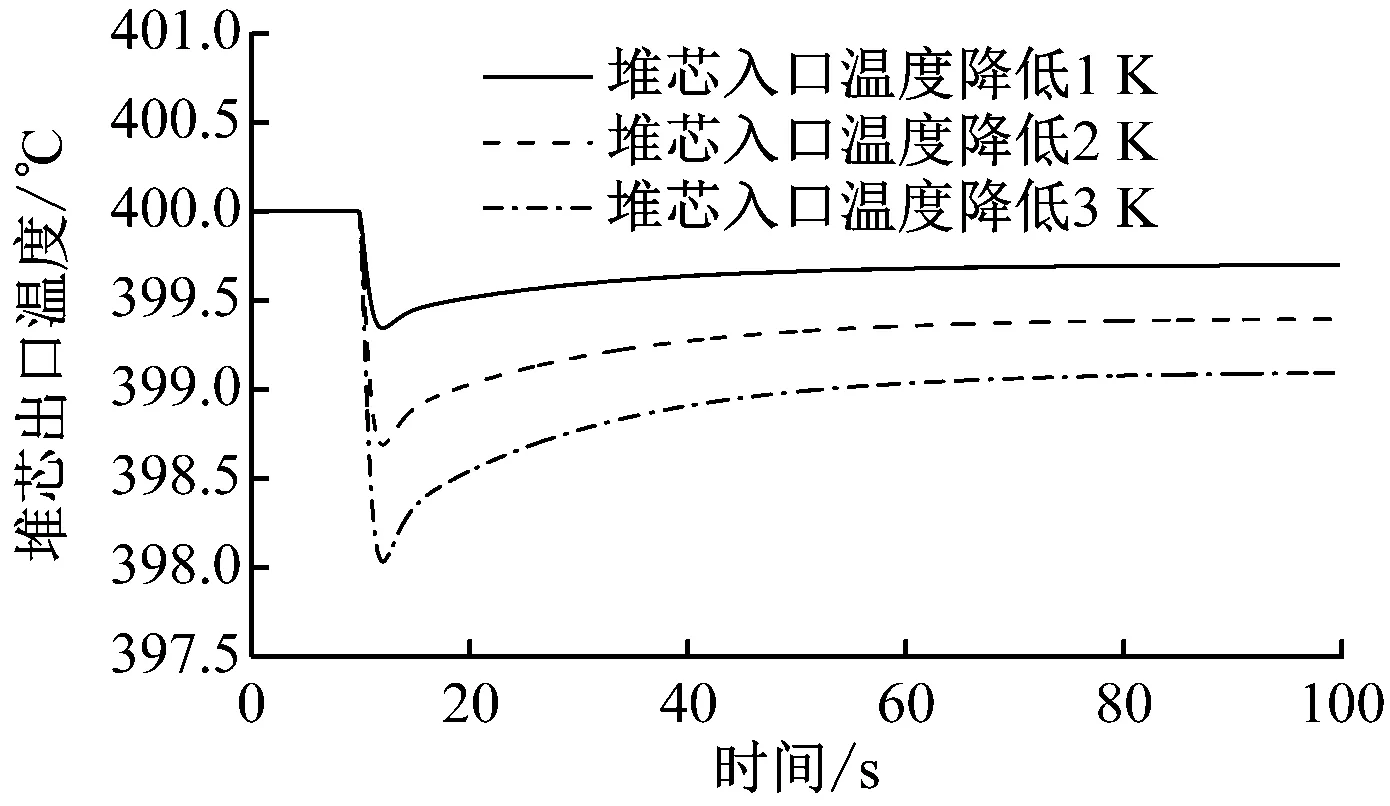
(b) 堆芯出口温度图3 堆芯入口温度阶跃降低时归一化堆芯功率和堆芯 出口温度的变化
3 堆芯功率ADRC控制系统
3.1 ADRC控制原理
ADRC由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)3个基本单元组成。TD的作用是安排过渡过程,并提取含有随机噪声的输入信号和微分信号;ESO用于估计对象状态和不确定扰动信息,并用给予补偿的方法替代积分反馈作用;NLSEF根据TD和ESO的输出信号进行控制和扰动补偿。典型的二阶ADRC控制器结构见图4。其中,v为设定值信号;v1为跟踪信号;v2为跟踪微分信号;z1为输出信号y的估计值;z2为变化速度估计值;z3为扰动量估计值;u为被控对象输入信号;e1为跟踪偏差;e2为跟踪微分偏差;b0为补偿因子;u0为NLSEF计算输出信号。
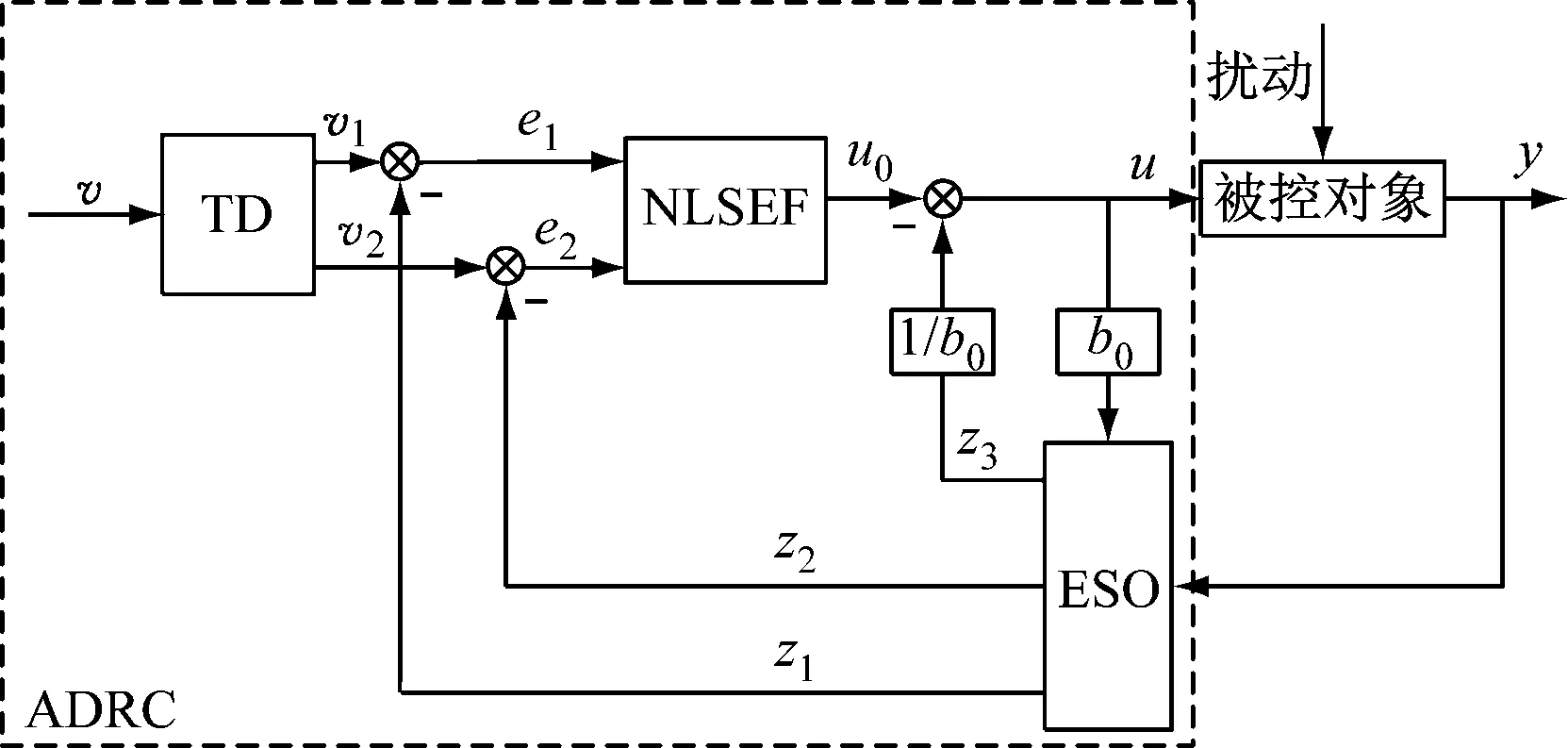
图4 二阶ADRC控制器框图Fig.4 Diagram of second-order ADRC controller
二阶跟踪微分器的离散形式为:

(13)
式中:r为速度因子;h0为滤波因子;h为采样步长;fhan为最优综合控制函数;k为采样次数。
(14)
d=rh0
d0=h0d
y=v1+h0v2
三阶扩张状态观测器的离散形式为:
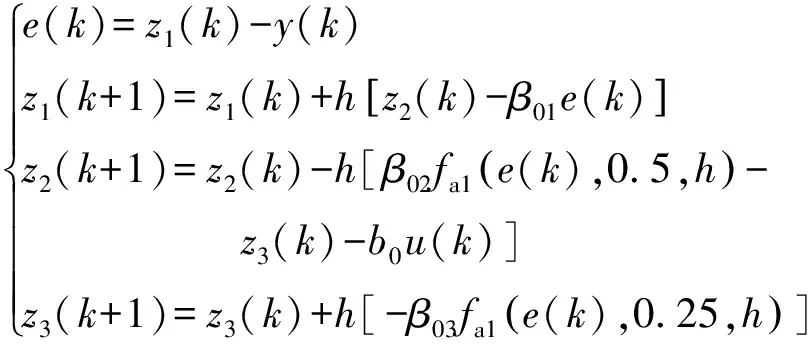
(15)
式中:e(k)为输出信号与其估计值的差值;β01、β02和β03均为控制器非线性函数;α为控制器对外部扰动的适应度;σ为非线性函数的线性区间长度。
非线性状态误差反馈离散表达式为:

(16)
式中:β11、β12均为增益系数;h1为NLSEF中非线性函数的线性区间长度。
扰动补偿过程为:
u(k)=u0(k)-z3(k)/b0
(17)
3.2 功率控制系统设计
3.2.1 ADRC功率控制策略
LBE-XADS依靠质子束流与散裂靶作用产生中子源,用于控制反应堆功率,并通过调节二回路给水质量流量将堆芯产生的热量导出,维持堆芯入口温度恒定。建立的LBE-XADS堆芯系统的功率控制系统见图5。其中,δnrs为堆芯功率设定值;δnr1为过渡过程信号;δnr2为该过渡过程的近似微分信号。
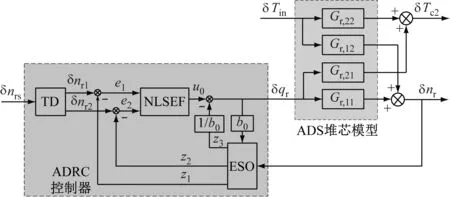
图5 LBE-XADS堆芯系统功率控制原理图Fig.5 Schematic diagram of power control for LBE-XADS core system
3.2.2 ADRC控制器参数整定
ADRC控制参数包括:TD控制变量为h、h0和r;ESO控制变量为β01、β02和β03;NLSEF控制变量为β11、β12和b0。以上参数可根据TD、ESO和NLSEF的各自功能,按照“分离性原理”分别进行整定。其中,TD和ESO控制参数与采样步长h相关[10]。NLSEF中β11、β12、b0分别相当于PID控制器中的比例、微分和积分环节。采用“试凑法”对上述参数进行整定。结合仿真计算结果,得到β11=0.16、β12=0.3、b0=0.22。
4 仿真验证
利用Matlab软件搭建LBE-XADS堆芯系统非线性模型,并基于S-Function建立ADRC控制器模型,开展LBE-XADS堆芯系统闭环控制的性能验证。分别在100%FP(FP为满功率)和30%FP工况下,将ADRC控制与PID控制进行对比分析。其中,PID控制采用单闭环控制结构,利用Matlab的PID tuner对控制器参数进行整定。
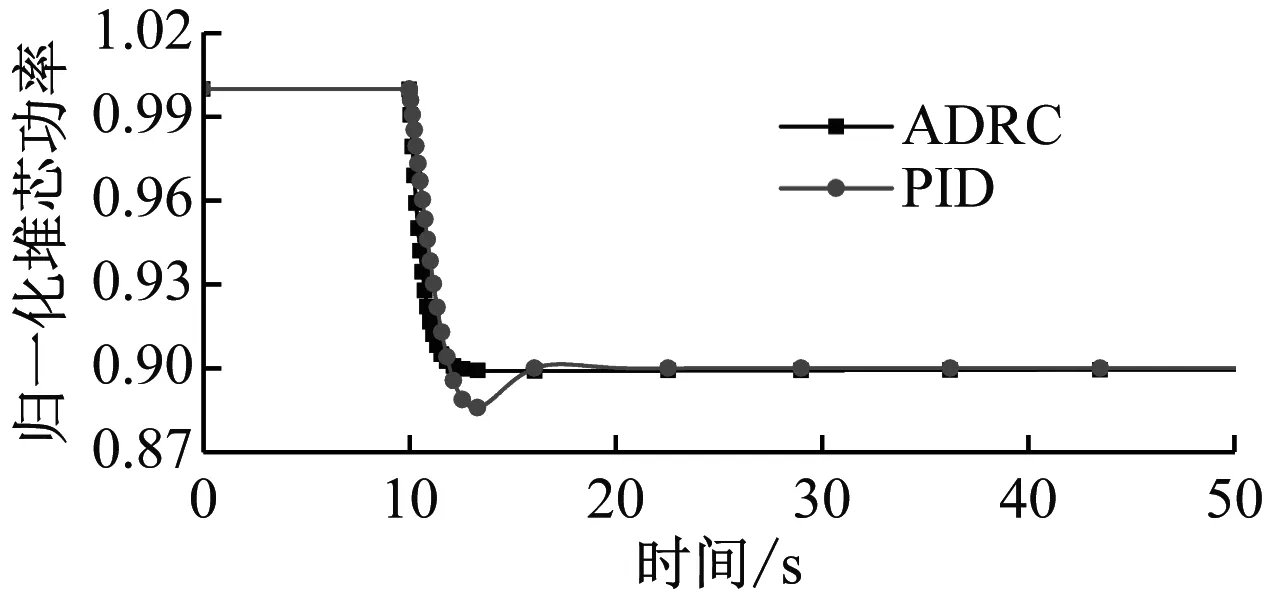
4.1 功率设定值跟踪性能验证
LBE-XADS堆芯系统达到稳定后,在10 s时堆芯功率设定值阶跃降低10%,在100%FP和30%FP工况下归一化堆芯功率和堆芯出口温度变化分别见图6和图7。堆芯功率设定值阶跃降低导致其测量值与设定值之间的偏差增大,LBE-XADS堆芯系统根据偏差调节外中子源强度,使堆芯功率测量值快速降低至设定值附近。采用ADRC控制时,归一化堆芯功率无超调;采用PID控制时,归一化堆芯功率超调量较大,且稳定时间更长。由于LBE-XADS堆芯系统具有明显的非线性特性,不同负荷下PID控制器的控制性能差别较大,而ADRC控制器表现出良好的设定值跟踪能力和自适应能力。这是因为ADRC控制器中的ESO能够给出模型非线性影响的估计值,并根据估计值进行补偿计算,实现被控对象动态反馈的线性化,并利用NLSEF对线性化后的对象进行有效控制。
(a) 归一化堆芯功率
(b) 堆芯出口温度
(a) 归一化堆芯功率
(b) 堆芯出口温度
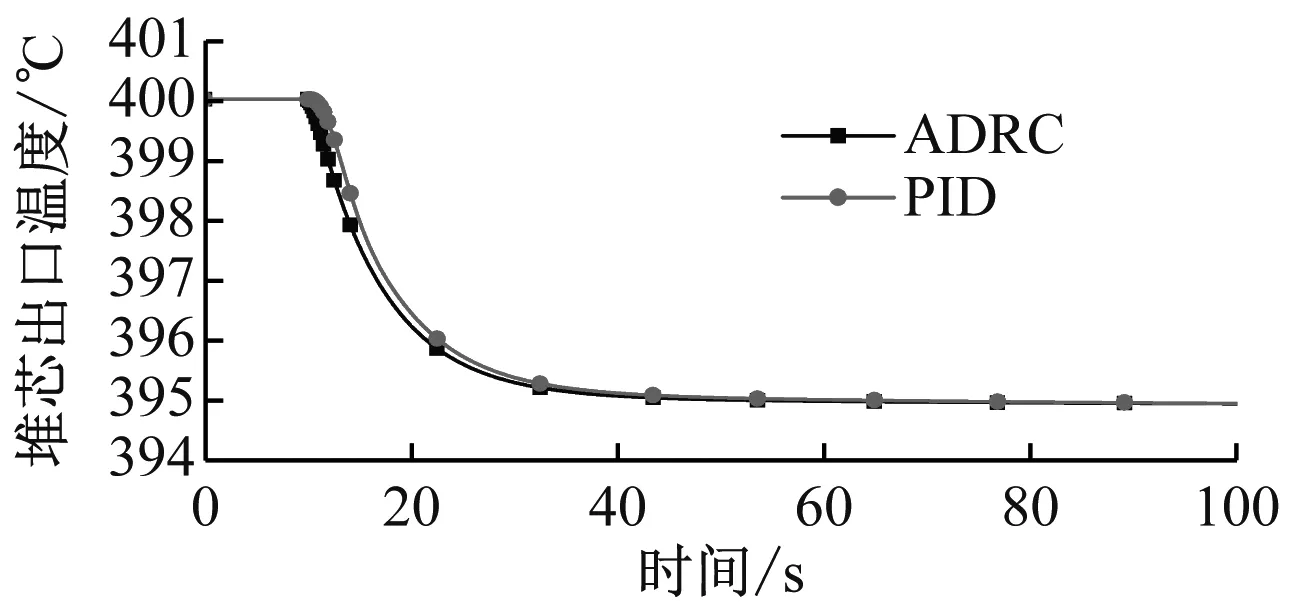
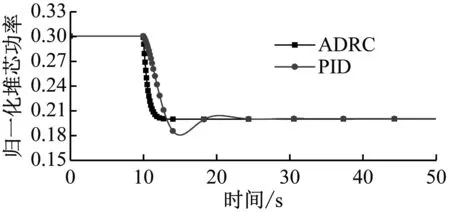
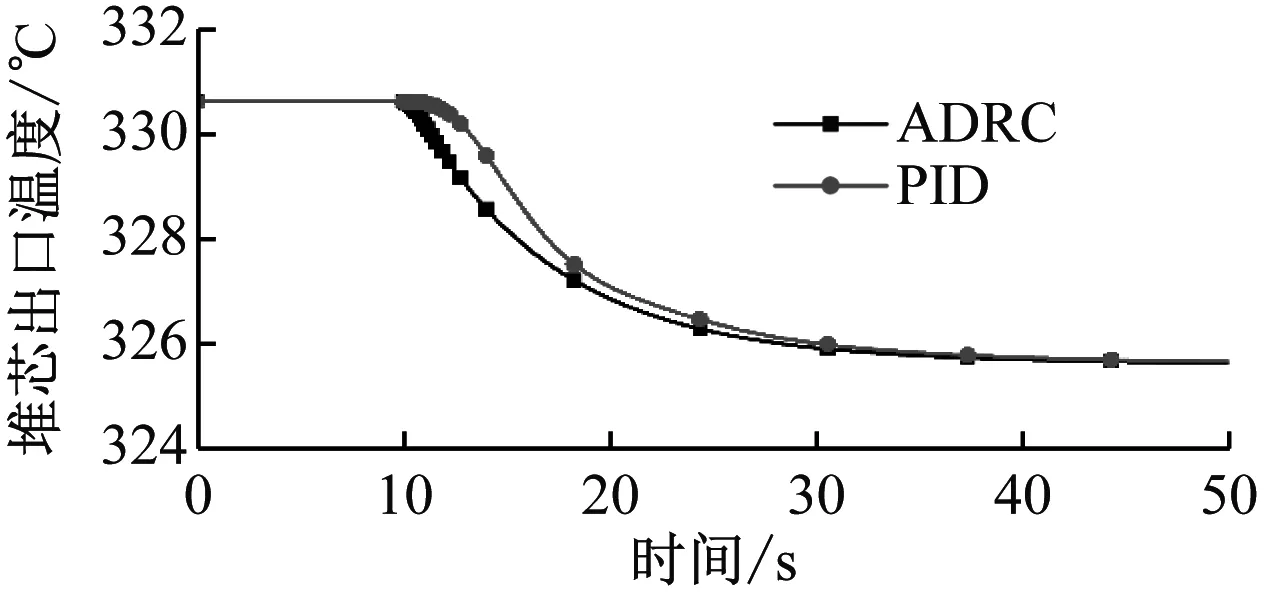
4.2 抗扰性能验证
LBE-XADS堆芯系统达到稳定后,在10 s时堆芯入口温度阶跃提高2 K,在100%FP和30%FP工况下归一化堆芯功率和堆芯出口温度的变化分别见图8和图9。在初始阶段,由于堆芯进、出口平均温度升高,在冷却剂温度负反应性反馈作用下,堆芯反应性降低,归一化堆芯功率下降。此时,堆芯功率测量值与设定值之间的偏差增大,控制系统根据偏差调节外中子源强度,使归一化堆芯功率重新达到设定值。对比ADRC与PID控制效果可知,采用ADRC控制时,归一化堆芯功率正(负)波动较小,稳定时间较短。此外,ADRC控制器中的ESO能够实时评估外部堆芯入口温度扰动,并利用NLSEF对扰动进行抑制,同样表现出良好的抗扰性能和自适应能力;采用PID控制器时,2种负荷下控制系统抗扰性能差别较大。
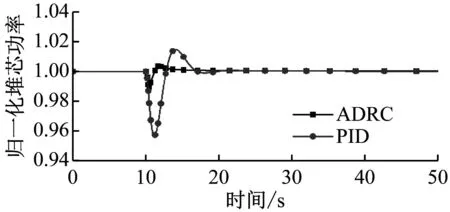
(a) 归一化堆芯功率
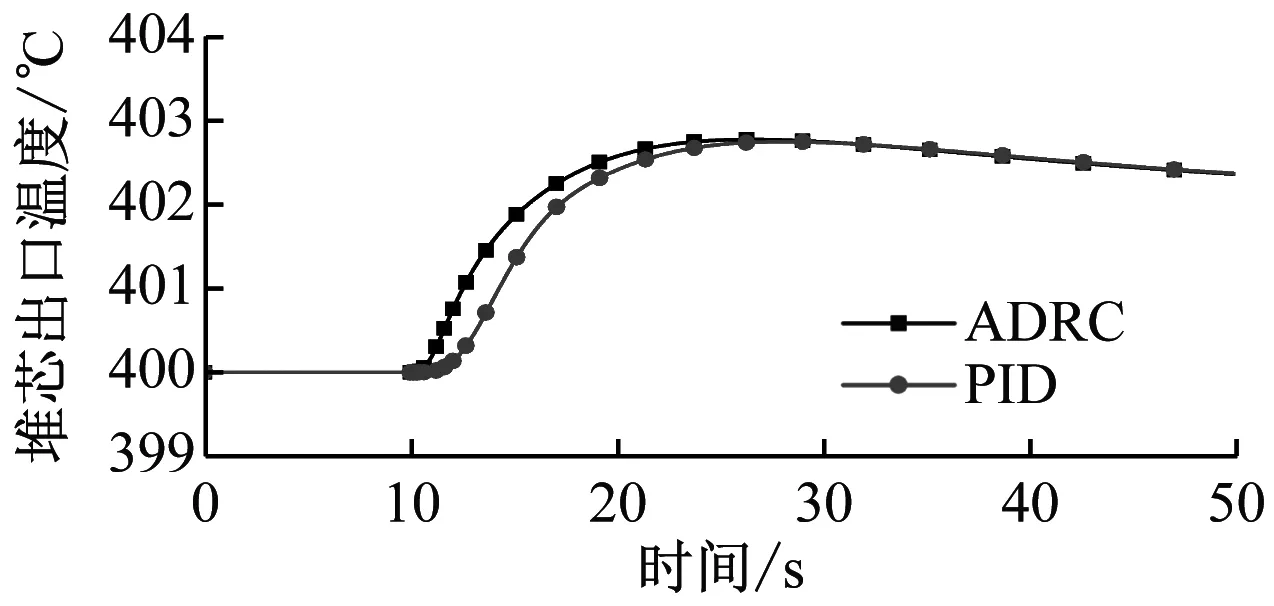
(b) 堆芯出口温度

(a) 归一化堆芯功率
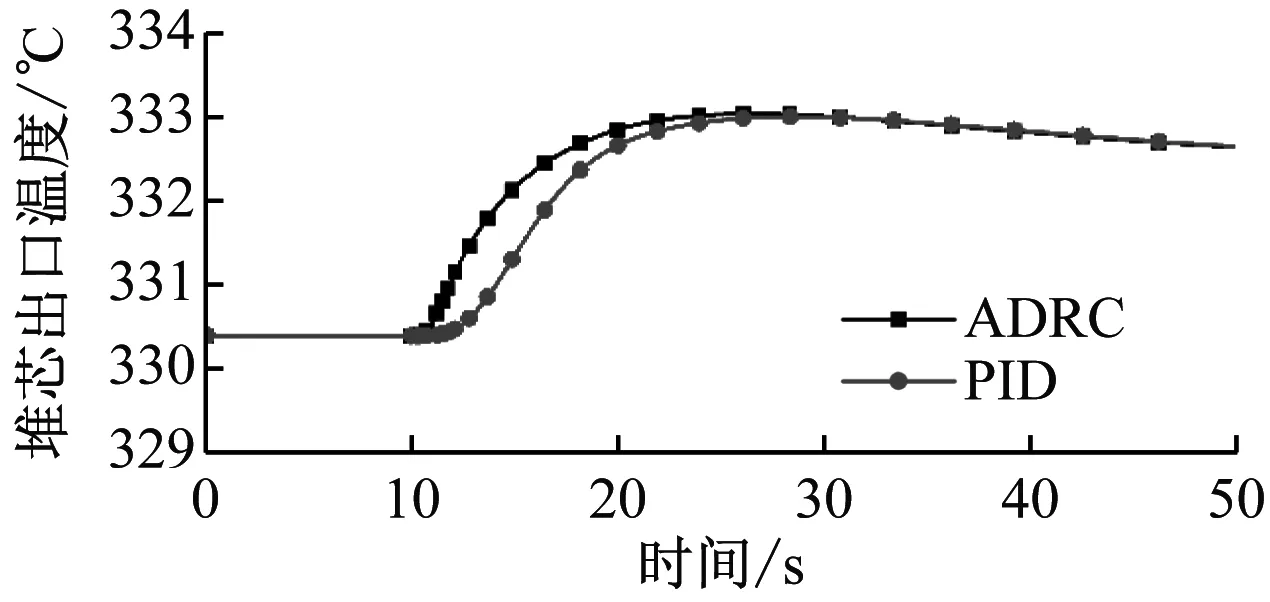
(b) 堆芯出口温度
5 结 论
(1) 在100%FP和30%FP工况下,ADRC的控制性能优于PID。
(2) ADRC控制对于LBE-XADS堆芯系统功率具有良好的负荷跟踪能力、扰动抑制能力和自适应能力。
