航空电机无位置传感器自抗扰控制技术研究
2022-03-30米乾宝
李 庚,米乾宝,顾 鹏,黄 俊
( 西安航天精密机电研究所,西安710100)
0 引 言
近年来,随着技术的发展,永磁同步电动机(PMSM)以其高可靠性、高功率密度、简单的构造和优越的性能,广泛应用在诸如航空航天、交通牵引、军事军工和工业机器人等领域[1-2]。同时无位置传感器控制技术的出现,也使得PMSM更适应航空电机恶劣的环境、极端的可靠性指标和变负载要求和宽速域的转速要求。
永磁同步电机无位置传感器控制技术可根据适用速域分为两种,在中高速域采用的是基于电机数学模型的控制技术,在低速域多采用基于电机凸极效应的高频注入法,如高频方波注入法。由于低速域电机反电势较低,不易检测电机转子位置信息,所以高频注入法是当今研究的关键和难点,而且由于电机系统模型不精确、外部周期性干扰和非周期线性干扰的存在、内部参数的变化都会降低无位置传感器控制系统的控制性能[3-4]。高频方波注入法在多种低速域无位置控制技术中,注入频率高,动态性能较好,但其受电机参数影响较大,鲁棒性较差。
针对上述问题,本文采用自抗扰控制技术配合高频方波注入的无传感器控制系统,为提高系统抗干扰能力和动态性能,对干扰进行估计和补偿,分别设计电流环、速度环的由扩张状态观测器和非线性控制律(NLSEF)组成的ADRC控制器,并采用冻结系数法提出了二阶非线性ESO的参数设定原则,具有一定的参考价值。为验证设计抗干扰性,在Simulink中搭建无位置传感器控制系统对控制系统进行了仿真验证。
1 自抗扰控制技术
在电机运行过程中,会受到周期性和非周期性的扰动,周期性扰动如齿槽转矩、死区效应、电机永磁体磁链谐波等,非周期性扰动如电机运行过程中电阻电感参数变化、负载转矩变化、工作条件变化等,会使电机的非线性加大,使控制性能下降[5]。
自抗扰控制(ADRC)中,将系统受到的总扰动扩张为系统的一个状态,使其可以被扩张状态观测器观测到并加以补偿,使系统成为理想的“积分器串联型”系统,从而获得理想的控制效果,这个过程就是自抗扰控制的“动态补偿线性化”[6]。
为实现扰动估计和动态补偿线性化,传统ADRC控制器由三部分组成,即微分跟踪器(TD)、扩张状态观测器(ESO)和非线性控制律。微分跟踪器用来安排“过渡过程”和产生微分信号,避免系统超调,但是会降低转速环电流环的动态性能,为简化系统设计,本文在设计中去除TD,控制器结构如图1所示,本设计的ADRC由非线性扩张状态观测器和非线性误差反馈控制律(NLSEF)组成。非线性函数fal(e,a,δ)函数是ADRC控制中的一个经典函数,是“大误差小增益,小误差大增益”的控制思想一种体现,非线性误差反馈控制律的效果好于线性控制律,所以采用非线性函数fal(e,a,δ)函数作为控制律和观测器的核心函数。扩张状态观测器(ESO)是ADRC控制器的重要组成部分,用以观测系统中的总扰动。非线性控制律中补偿总扰动,输出补偿后的控制量u(t)使系统成为理想的线性积分器串联型系统。
改进后的自抗扰控制器结构如图1所示,如式(1)、式(2)所示,ESO接受反馈信息,以z1跟踪转速ωr,以z2为ESO观测的扰动信息,由初始控制量u0(t)和观测值z2得到动态扰动补偿线性化后的控制量u(t),以实现对扰动的估计和补偿。
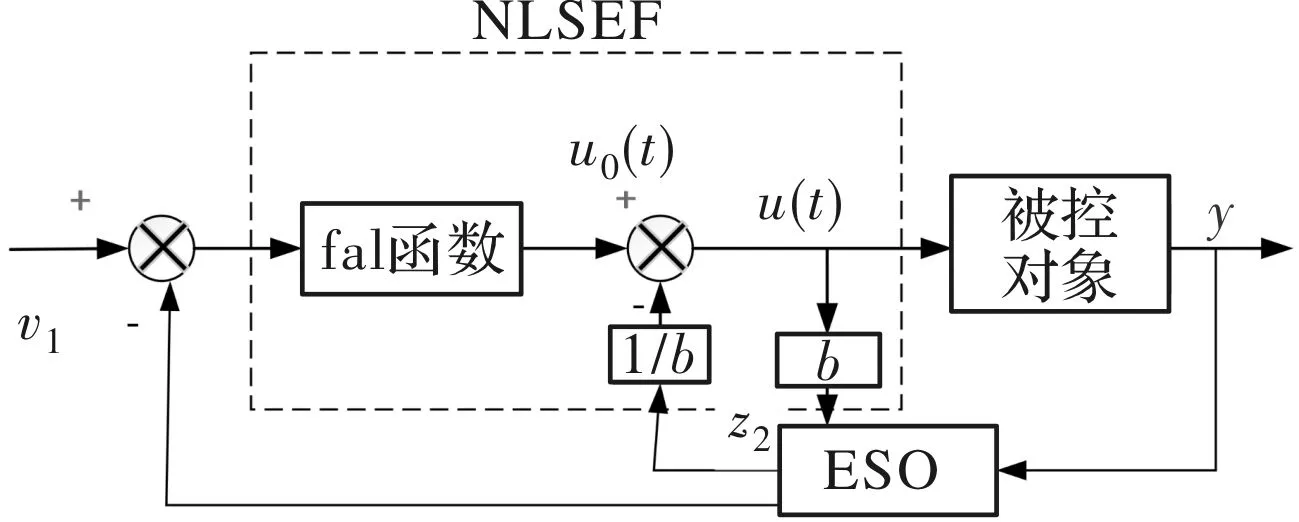
图1 自抗扰控制器原理图
非线性扩张状态观测器:
(1)
非线性误差反馈控制律:
(2)
式中,z1为对系统反馈y的状态估计;z2为对系统总扰动的估计;β01、β02分别为误差增益系数;v1为系统给定速度;u0(t)为初始输出信号;u(t)为控制器输出的补偿后的控制信号;b为控制参数;fal(e,a,δ)为最优控制函数。
(3)
式中,δ为函数线性区域的长度,α为增长因子,且0<α<1,一般取0.5。
2 转速环电流环自抗扰控制器设计
先进行转速环自抗扰控制器的设计,将外部干扰和内部干扰纳入到电机模型中,改写电机模型可得PMSM的转速环数学模型:
(4)
(5)
其中,Qω为总扰动f(ωr,TL)的微分,转速环成为二阶系统,针对系统(5),设计转速环ADRC控制器如下:
扩张状态观测器:
(6)
非线性误差反馈控制律:
(7)
式中,z1为对反馈转速ωr的状态估计,z2为对系统扰动的观测值,控制参数bω=ψfp/J。
电流环的控制性能直接影响电机系统的控制性能,然而电流环也受到包括外部温度、负载变化造成的干扰、电机永磁体磁链谐波等干扰,电路中引入的IGBT或MOSFET死区造成的非线性因素和其他未建模因素等。我们将上述电流环受到的扰动代入到电流环方程中可得:
(8)
式中,γid、γiqγiq分别为电流环d、q轴未建模扰动。

(9)
(10)
式中,z1为d-q轴反馈电流idq的状态估计,z2为扰动信号的观测值;udq0为电机d-q轴的初始控制信号,udq为补偿输出信号。
相比于线性ADRC,采用非线性函数如fal(e,a,δ)函数等的非线性ADRC,控制效率更高、误差更小,但是非线性ADRC的参数整定一直是一个难题,只能凭借工程经验进行,没有明确的设计原则。本文采用“系数冻结法”,分析非线性ESO带宽及参数配置原则。以转速环二阶ESO为例,令F=fal(e,a,δ)/e,通过计算可知F是一单调函数,对转速环ESO冻结参数进行拉普拉斯变换可得
(11)
令bωiq=-f0,则有f0到z2(s)的传递函数
(12)
可知其幅相特性为
(13)
在频域内,我们可以类似线性系统,给出非线性ESO的频域指标,在给定的频域范围ω∈[0,ω0]的范围内,开环传递函数G(s)应满足:
(14)

(15)
由幅频特性公式可见,随着F的增大,A(ω)减小,则容易得出要使观测器幅频特性满足|A(ω)-1|≤A0,则需要
(16)
依据以上分析并结合文献[7],给出二阶非线性ESO符合频域指标的参数选择的原则,即充分条件:
(17)
3 控制系统仿真验证
以上述自抗扰理论设计转速环、电流环自抗扰控制器,搭建基于ADRC的高频方波注入无位置控制仿真系统,以式(17)配置转速环电流环控制器参数,分别验证控制系统在突加、突减负载、周期负载和变工况情况下的表现。自抗扰控制器原理图如图1所示,无位置传感器控制系统框图如图2所示。
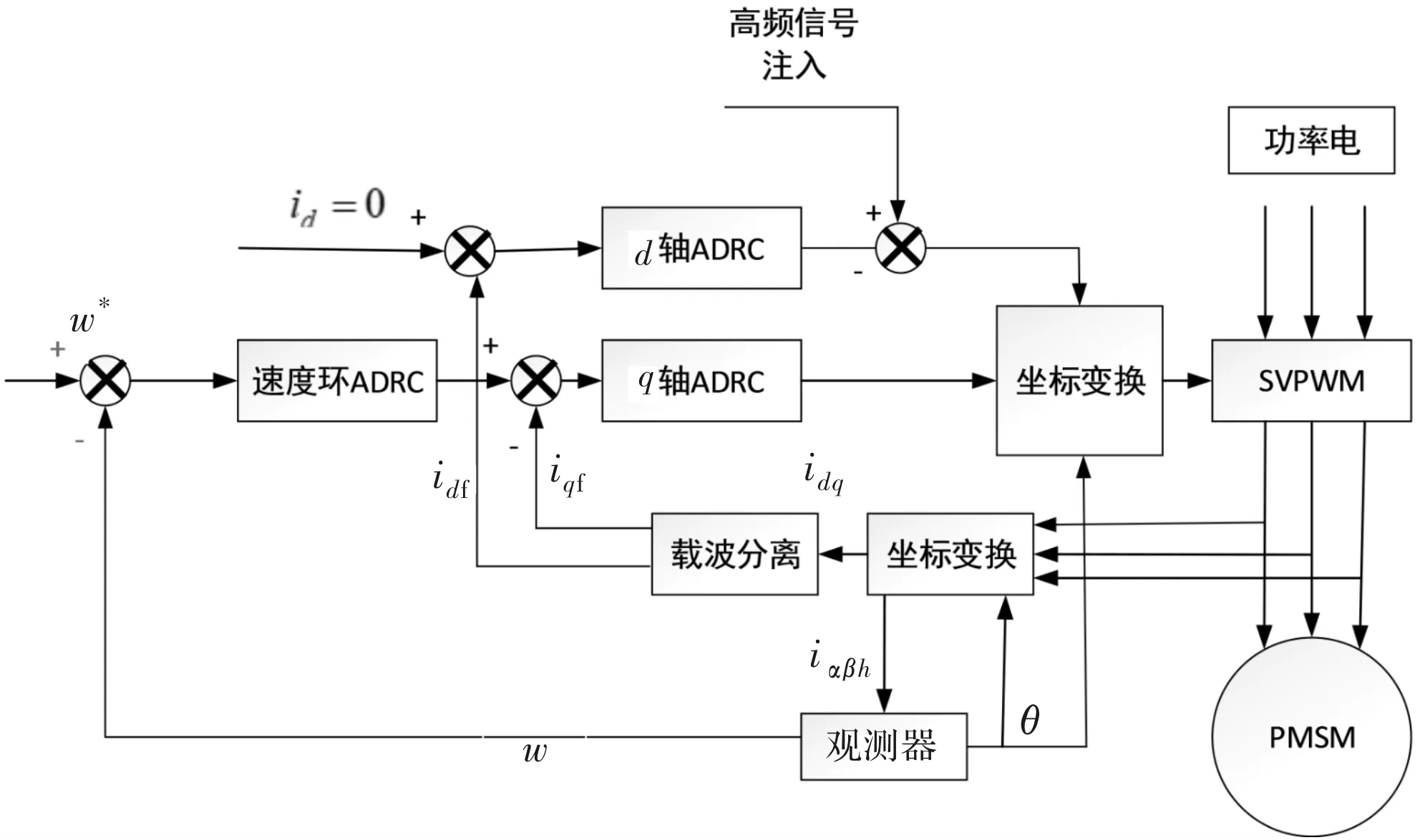
图2 ADRC无位置传感器控制原理图
本文的控制对象为凸极式永磁同步电机,其具体参数如表1所示。
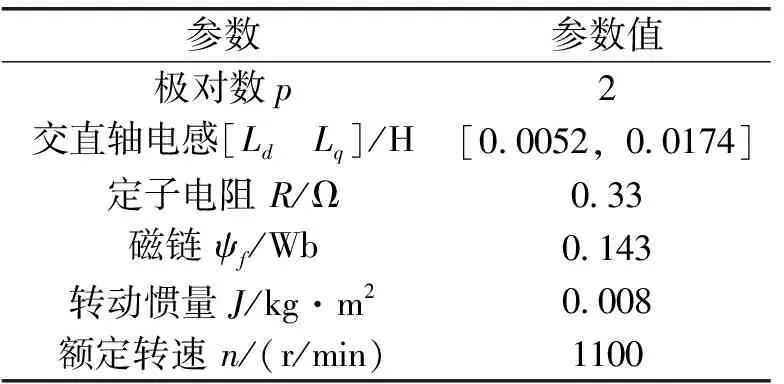
表1 永磁同步电机参数
为验证系统低速运行及抗外部干扰能力,进行加减负载实验,给定转速100 r/min,在0.2 s分别加载2 Nm、4 Nm、6 Nm的大负载力矩,在0.4 s消去2 Nm、4 Nm、6 Nm的负载力矩。图3即为ADRC控制系统的响应,其中图3(a)为转速响应曲线,图3(b)干扰力矩估计值。系统借助ESO估计出包含外加力矩在内的总干扰,在2 Nm、4 Nm、6 Nm的大负载力矩下转速降分别为0.6 r/min、2.2 r/min、5 r/min,并在0.002 s、0.004 s、0.01 s内经有限次振荡后回归稳定。
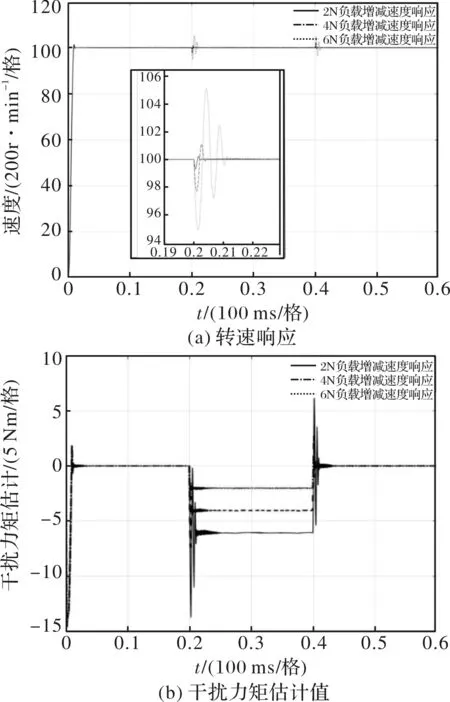
图3 电动机控制系统负载突变响应
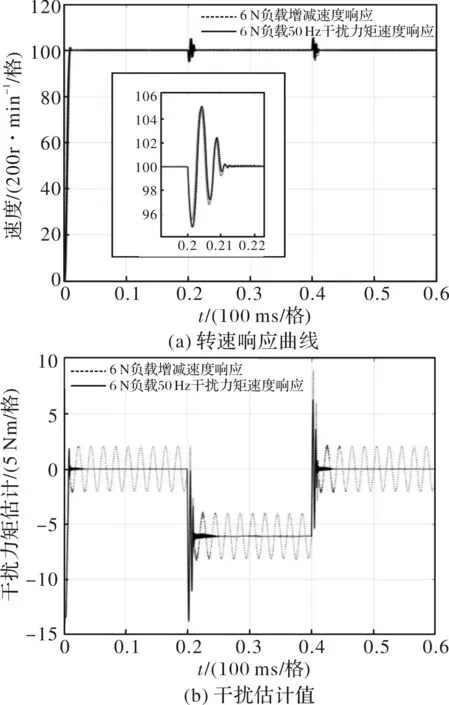
图4 周期干扰实验结果
以幅值2 Nm,频率50 Hz的周期力矩在6 Nm大负载突加突减实验中模拟周期干扰进行实验。图4为实验结果,其中图4(a)为转速曲线,图4(b)为外部扰动估计值曲线,系统估计的外部干扰幅值为2 Nm,频率50 Hz,调速转速降变化较大,可能是因为外加周期干扰与调速时电磁力矩形成了耦合。
周期干扰试验的系统响应如表2所示,系统受幅值2 Nm,频率为50 Hz的周期干扰负载时,输出转矩含有幅值为2 Nm,频率为50 Hz的周期性补偿力矩,结合图3、图4,系统对阶跃和周期性干扰力矩均有优秀的估计补偿能力。

表2 自抗扰控制系统实验数据
用多组电机内阻值模拟不同工作环境对电机参数造成的系统内扰,分别设定电子电阻R为5 Ω、3 Ω、1 Ω、 0.5 Ω、0.33 Ω 和0.11 Ω,设定额定转速100 r/min起动,在0.2 s使转速降至0,在0.4 s再提升转速至100 r/min,转速响应如图5所示,在1 Ω以下的定子阻值下系统超调为1.5%,在3 Ω阻值时系统超调为1.3%,在定子阻值为5 Ω时系统超调为1.8%,超调均在5%以内,调整时间ts分布在8 ms~11 ms区间,可见在电机参数失配时,自抗扰控制系统仍有良好的动态响应:从不同干扰条件下系统调速仿真结果可知,系统的性能优良,能够估计补偿不确定的内部和外部干扰,系统对复杂工况引起的电机系统内部参数变化不敏感,对于航空电机应用在复杂极端、没有精确理想模型的航空电机工作领域极其重要,使自抗扰控制具有更强的工程价值。
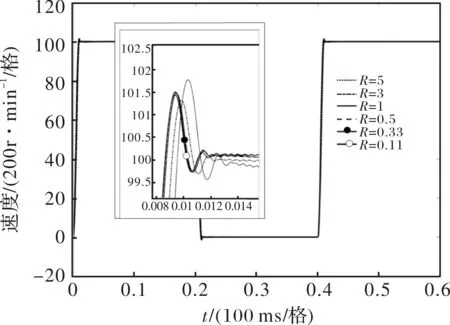
图5 不同参数的转速响应
4 结 语
为了设计具有更强抗干扰能力的低速无位置传感器控制系统,本文选择将自抗扰控制技术增强高频方波注入法,其特点是,将系统内外扰动统一扩张为系统总扰动加以补偿,系统抗扰能力强,且对被控电机参数不敏感,可以有效增强高频方波注入法的鲁棒性。采用“冻结参数法”分析ESO并给出了参数调整原则,简化了非线性ESO参数的调整。并进行了Simulink 仿真,搭建基于ADRC算法的改进型高频方波注入模型,结果表明结合ADRC控制器的改进型高频方波注入法响应快速、超调小,对工况变化和外部干扰有极强的适应能力,负载突变时和转速指令突变时均有优秀的转速响应,能够准确估计干扰并加以补偿,进一步提高了高频注入技术在航空领域的适应性和鲁棒性。