飞行高度与郁闭度对水杉冠幅提取影响的研究
2022-03-30周辰琴余拥军方陆明刘雨真胡建锦
周辰琴,余拥军,方陆明,刘雨真,胡建锦
(1.浙江农林大学 数学与计算机科学学院,杭州 311300;2.浙江省林业智能监测与信息技术研究重点实验室,杭州 311300;3.浙江省衢州市开化林业局,浙江 衢州 324000)
树冠是树木进行光合作用的主要场所,也是低空无人机易直接识别的部分,准确地获得冠幅信息有助于树种识别、估测树木胸径、估算森林蓄积量、监测树木生长等信息。传统的冠幅测量方法及基于遥感图像的目视解视法[1-2]具有成本高,费时、费力等弱点,而无人机具有低成本、空间分辨率高、安全、便捷、随时调查等特点,并因能获取高分辨率的影像,将广泛运用于森林调查,其快速、准确、高效的获取树冠及森林调查指标成了业界的关注点。
对于冠幅信息,国内外学者提出多种提取方法,如分水岭分割法[3-6]、面向对象[7-11]、随机森林、局部最大值法[12]、模板匹配[13-14]、区域生长法[15-16]等。乔正年等[17]以航空拍摄的影像为数据源,在面向对象分割法的基础上与人工DOM数据目视解译相结合进行单木冠幅提取,结果表明,面向对象法和目视解译法估测法都可有效获取单木冠幅且无显著差异;周艳飞等[18]以无人机航空影像为数据源,采用目视解译和面向对象方法提取了胡杨(Populuseuphratica)、柽柳(Tamarixchinensis)树冠信息,获得了树木的冠幅和林分郁闭度;冯静静等[19]提出一种基于影像的灰度梯度图像分割的树冠提取方法,简化原始影像复杂的背景信息,快速提取大范围单木树冠信息;Jing等[20]针对异龄林树冠变化较大,用分水岭分割算法进行单一尺度的分割效果非常不理想,采取了多尺度的高斯滤波和分水岭分割处理,最后对每个尺度下的结果进行修正和整合实现单木树冠的提取,提取效果得到了明显提升。
对比国内有关冠幅的提取研究,其所用的无人机影像都是无人机单一高度所拍摄的,韦蕾蕾[21]等基于无人机单视场对特定森林地块面积的提取,得出不同飞行高度对提取地块面积精度有影响。而对飞行高度是否会影响冠幅提取精度以及如何影响,还没有实验报导。65,70,75m是冠幅提取实验中无人机最常采用的飞行拍摄高度,本研究以具有江南特色的水杉(Metasequoiaglyptostroboides)林分为对象,针对林分不同郁闭度,设计无人机3个不同飞行高度获取高分辨率的影像,进行多尺度分割,再利用面向对象分类法提取冠幅,并与实测冠幅做对比,揭示飞行高度与郁闭度对树冠提取的影响。
1 实验区概况与数据获取
1.1 实验区概况
研究区位于杭州临安区青山湖风景区,地理坐标为:29°56′~30°23′N,118°51′~119°52′E,研究区占地面积约为64.5km2。气候温暖湿润、光照充足、雨量丰沛、四季分明,年平均气温15.9℃,极端最高气温41.2℃,最低气温达-13.1℃,全年降水量1 400mm左右,全年日照时数1 920h,无霜期234d。区域地处丘陵宽谷地带,山地平缓,土壤以红、黄壤为主,水肥条件好,拥有丰富的水杉资源。实验以该区域同期造林水杉为研究对象。各树冠幅实测数据如表1所示。
由表1可知,相对低郁闭度的树冠冠幅普遍比相对高郁闭度树冠冠幅大,且相对低郁闭度的东西冠幅与南北冠幅差异不大,而相对高郁闭度的东西冠幅与南北冠幅相差较大,可能是由于相对低郁闭度树木间距较大,相互影响较小,而相对高郁闭度树木间距较小,相互影响较大所致。
1.2 影像数据获取来源
研究采用大疆精灵Phantom 4 Pro V2.0无人机,主要由飞行器、遥控器、云台相机组成。配备的云台相机为24mm低畸变广角相机、高精度防抖云台以及1英寸CMOS图像传感器,可拍摄2 000万像素JPEG以及无损RAW格式的照片。航拍摄于2021年3月24日,天气晴朗,光线充足,能见度高,基本无风,适合无人机作业。在无人机起飞前,预先设置好飞行高度、飞行区域等参数。研究使用Pix4Dcapture软件进行无人机飞行参数设置以及飞行路线规划,拍摄区域大小为190m×250m。无人机飞行相对高度设置为65,70,75m,云台拍摄角度为90°,飞行路线主航线重叠为90%,航线间重叠90%,飞行速度设置为Slow。无人机航拍所获得的影像为具有RBG3个波段的JPEG格式影像。
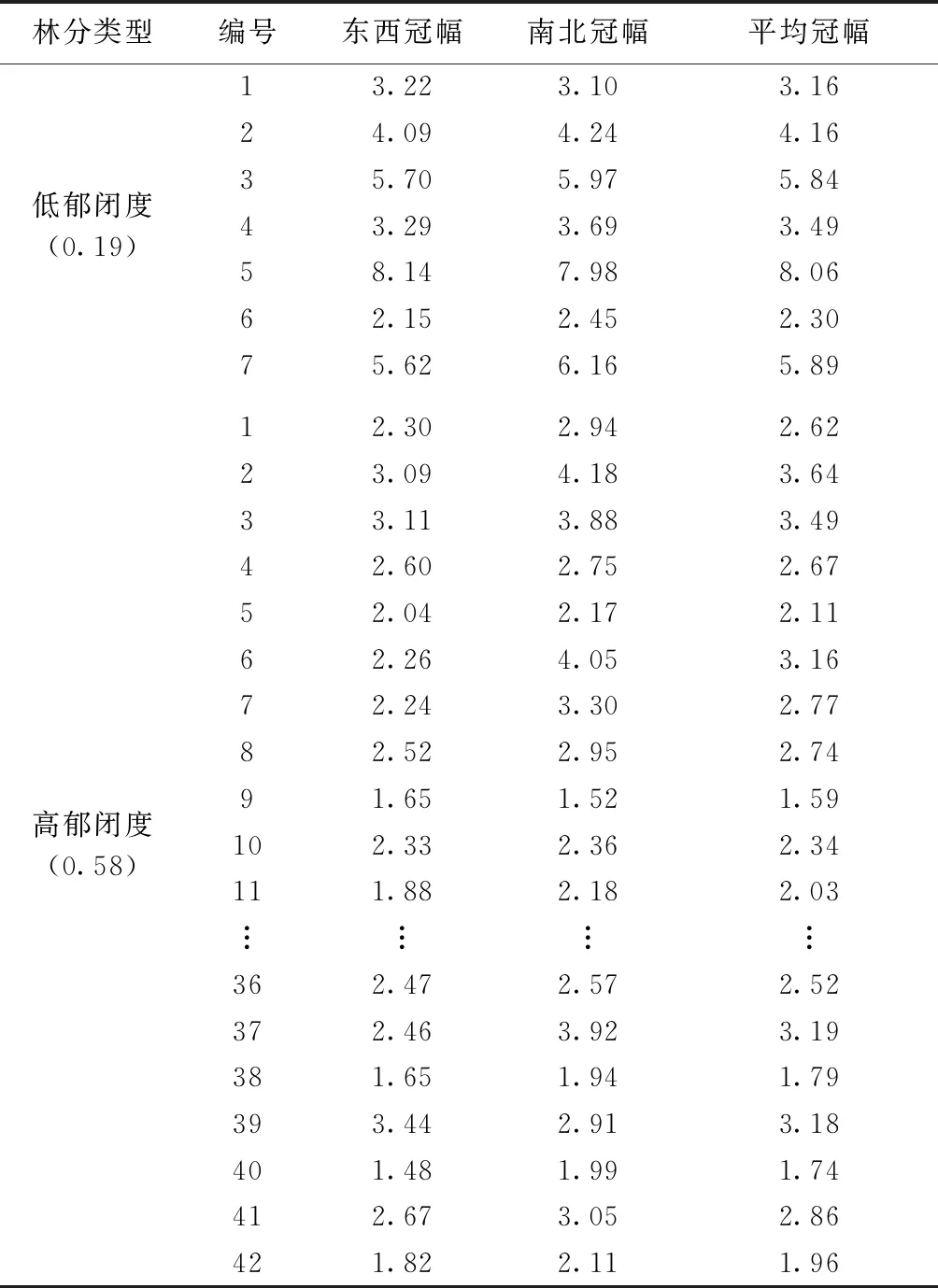
表1 水杉林各树木冠幅实测值
1.3 数据预处理
研究数据采用Agitato Photo Scan软件进行预处理。Agitato Photo Scan软件是一款基于影像自动生成高质量三维模型的软件[22],可以从一组具有相应参考信息的重叠图像中生成地理参考密集点云、纹理多边形模型、数字表面模型(DSM)和正射影像(DOM)。数据预处理采用导入照片、对齐照片,构建密集点云、网格、纹理、数字表面模型(DSM)、正射影像(DOM),导出正射影像(DOM)以及导出数字表面模型(DSM)的工作流程。
2 研究方法
2.1 多尺度分割
采用自下而上的多尺度分割的思路,逐级合并,即以图像中任一像元作为中心点,将这个像元周围异质性最小的像元集合合并成一个对象单元,再把这些小单元逐渐聚合成一个较大对象。执行分割需要有分割参数、形状权重以及紧凑度权重3个参数。分割尺度直接影响到分割对象的大小[23-24],分割尺度越大,分割得到的对象越大,斑块数量越少;分割尺度越小,分割得到的对象越小,斑块数量越多。
2.2 面对对象分类
将多尺度分割之后得到的对象采用最邻近值分类。计算每个样本数据到待分类数据的距离,如果一个样本在特征空间中的k个最相似(即特征空间中最邻近)的样本中的大多数属于某一个类别,则该样本也属于这个类别。其具体步骤为:
1)创建类别:由于试验样地为纯林,无其他杂树,因此类别分类为树冠和间隙。
2)配置特征空间:过多的特征可能会存在冗余,增加计算量,影响分类精度,所以需要对特征进行优化。
3)选择样本:选择具有代表性的样本。
4)执行分类和结果优化:将分类结果进行优化,修正错分结果,将欠分割树冠分离,过分割树冠合并。
2.3 郁闭度提取
郁闭度是指正午时分阳光90度照射在森林中,乔木树冠在地面上的投影总面积与林地总面积之比,它反映着林分的密度。研究使用面对对象分类所分离出的树冠对象冠幅总面积与林分样地总面积之比,得出样地郁闭度,如式(1)所示:
(1)
式中:SC为面对对象分类所分离出的树冠对象总面积,ST为林分样地总面积。
2.4 冠幅提取
将分类结果以.shp格式输出,叠加原始图像,分类之后的树冠以面矢量的形式表示,将面矢量转为点矢量,将点矢量入坐标系,计算出一个矢量面中点矢量的最大X坐标、最小X坐标以及最大Y坐标、最小Y坐标。每个树冠的东西冠幅、南北冠幅以及平均冠幅表达式由式(2)—式(4)表示:
Wns=Ymax-Ymin
(2)
Wew=Xmax-Xmin
(3)
W=(Wew+Wns)/2
(4)
式(2)—式(4)中:Wns为南北冠幅,Ymax为坐标系上冠幅南北方向上最大的坐标,Ymin为坐标系上冠幅南北方向上最小的坐标;Wew为东西冠幅,Xmax为坐标系上冠幅东西方向上最大的坐标,Xmin为坐标系上冠幅东西方向上最小的坐标,W为东西冠幅与南北冠幅的平均值。
3 结果与分析
3.1 多尺度分割提取树冠
通过ESP2(Estimation of Scale Parameter)算法找到分割的最优的分割尺度。ESP2算法的工作原理是先计算一个波段内不同对象的局部方差(local variance graphs)然后计算出多个波段局部方差的均值,如式(5)所示。
LVmean=(LV1+LV2+LV3+…+LVn-1+LVn)/n
(5)
式中:LVmean为多个波段的局部方差均值,LV为单个波段内不同对象的局部方差,n为波段个数。
当分割尺度比目标对象大的时候,局部方差值将会很小,当分割尺度与目标对象大小接近时,局部方差将会增大。统计各个分割尺度的局部方差,局部方差随着分割尺度的增大而增大,当局部方差达到一个最大值时,此时同一对象内部同质化最大,各对象间差异最大,这个局部方差最大值所对应的分割尺度就是最优分割尺度。ESP2使用变化率(ROC)来评估一个对象级别到另一个对象级别的局部方差(LV)的动态,当ROC达到最大值时,该分割尺度就是最优分割尺度。变化率公式如式(6)所示:
(6)
式中:L为目标层的局部方差,L+1为将L目标层当作基准的下一层的局部方差。
ESP2通过3个层次的不同增量值来对分割尺度进行优化。3个层次参数分别为:第一层分割起始尺度、第一层分割尺度的增长步长;第二层分割起始尺度、第二层分割尺度的增长步长;第三层分割起始尺度、第三层分割尺度的增长步长。除了这些参数之外,ESP2还有形状因子、紧致度因子、循环次数、是否生成LV图等参数。其中,是否生成LV图参数若设为1则生成LV图,若设为0则不生成。ESP2算法完成之后会生成横坐标为尺度参数,纵坐标为局部方差(LV)和局部方差变化率(ROC)的折线图,该折线图每一个峰值都代表着一个最优分割尺度。以75m相对高郁闭度为例,最优尺度折线图如图1所示。
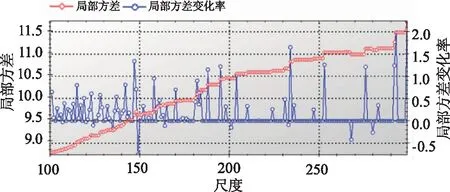
图1 最优尺度折线图
用这些尺度分别分割75m高郁闭度林分研究区,比较得出最佳的分割尺度,获得最优的分割结果。在选出最佳尺度时也会有树冠相连现象,需要进一步对分割的形状因子以及紧致度因子进行调整对比,筛选出满意的分割结果。不同飞行高度与不同郁闭度的最佳分割结果如图2所示。
3.2 面对对象分类
面对对象分类中的最邻近值分类是一种有监督的学习,最邻近值分类的关键点在于对特征空间的选择。在一般情况下,分类特征越多,分类的精度越高。由于每一个特征的贡献不一,分类特征过多会产生冗余,增大计算量,对分类的结果产生影响。因此,利用样本采集器导入所选的特征可进行优化,以75m低郁闭度林分为例,优化结果如图3所示。
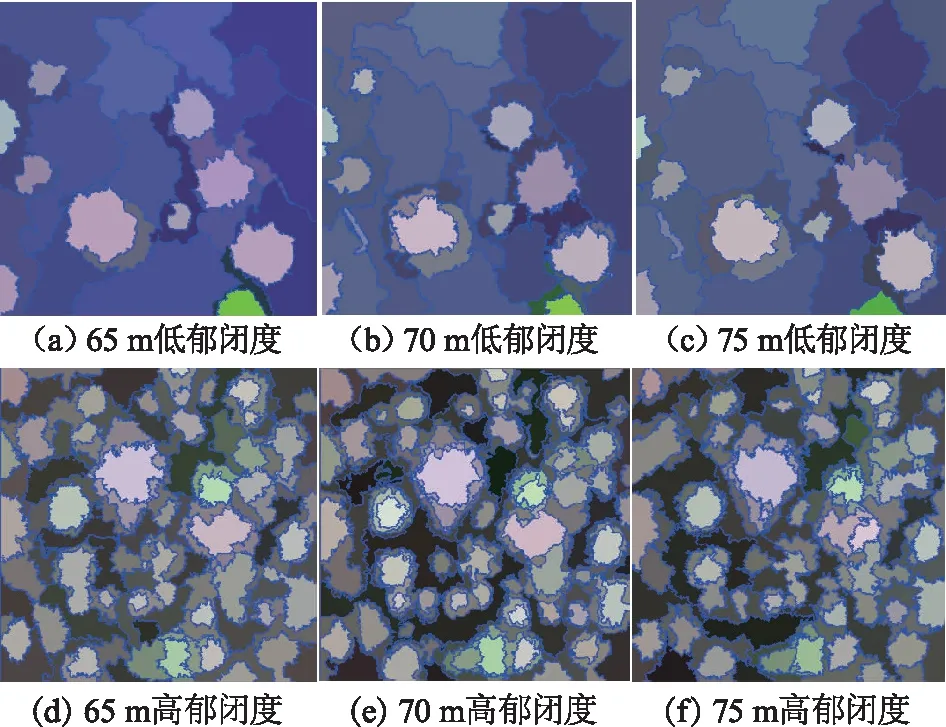
图2 不同飞行高度与不同郁闭度分割结果图
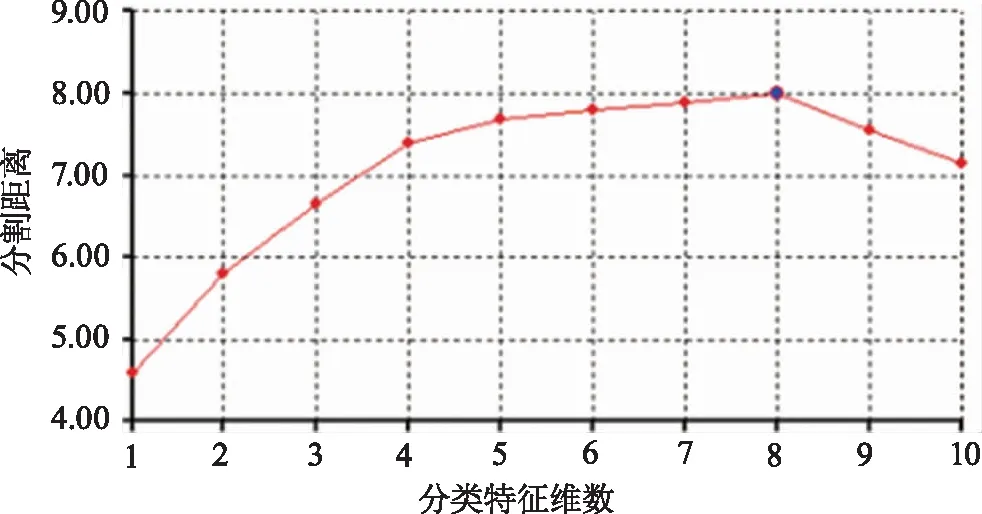
图3 分类特征维数与分割距离关系图
由图3可看出,在分类特征纬数为8时,最低分离度最高,此时的特征组合即为最优特征组合:R均值、B均值、G均值、R标准差、B标准差、G标准差、亮度值、Max.diff。
选取上述特征空间,提取树冠,将分类结果叠加到原始影像中,优化分类结果,将少量过度分割的树冠合并,少量欠分割的树冠分离,少量错分的划分正确类别。不同飞行高度与不同郁闭度的分类结果如图4所示。
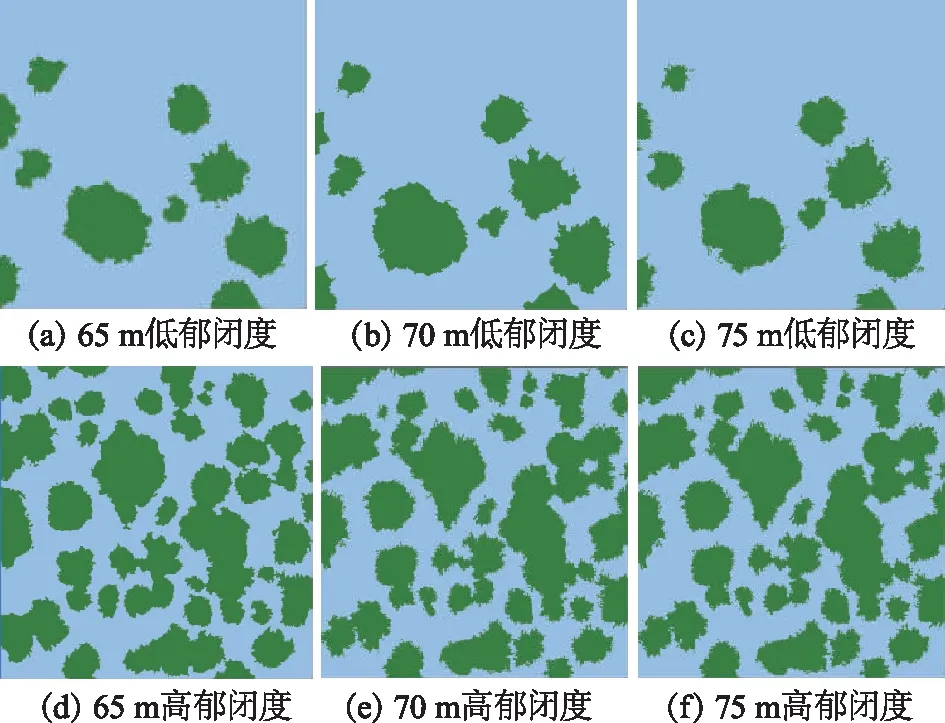
图4 不同飞行高度与不同郁闭度分类结果图
3.3 树冠提取精度评价
正午时分太阳垂直照射树木,在地面上形成阴影,通过测量阴影的东西宽度和南北宽度获得树冠的实测值。将自动提取的平均冠幅与实测的平均冠幅对比,分析比较两者的关系,以此来评价树冠提取精度。不同高度不同郁闭度提取精度分析表如表2所示。

表2 不同高度不同郁闭度提取精度分析
如图5所示,平均冠幅提取值与冠幅平均值实测值R2都在0.896 2之上,说明利用面向对象法分类来提取冠幅具有可行性,能够满足森林资源调查对于树冠参数的精度要求。
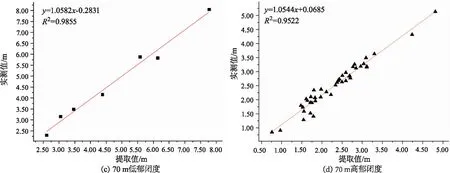
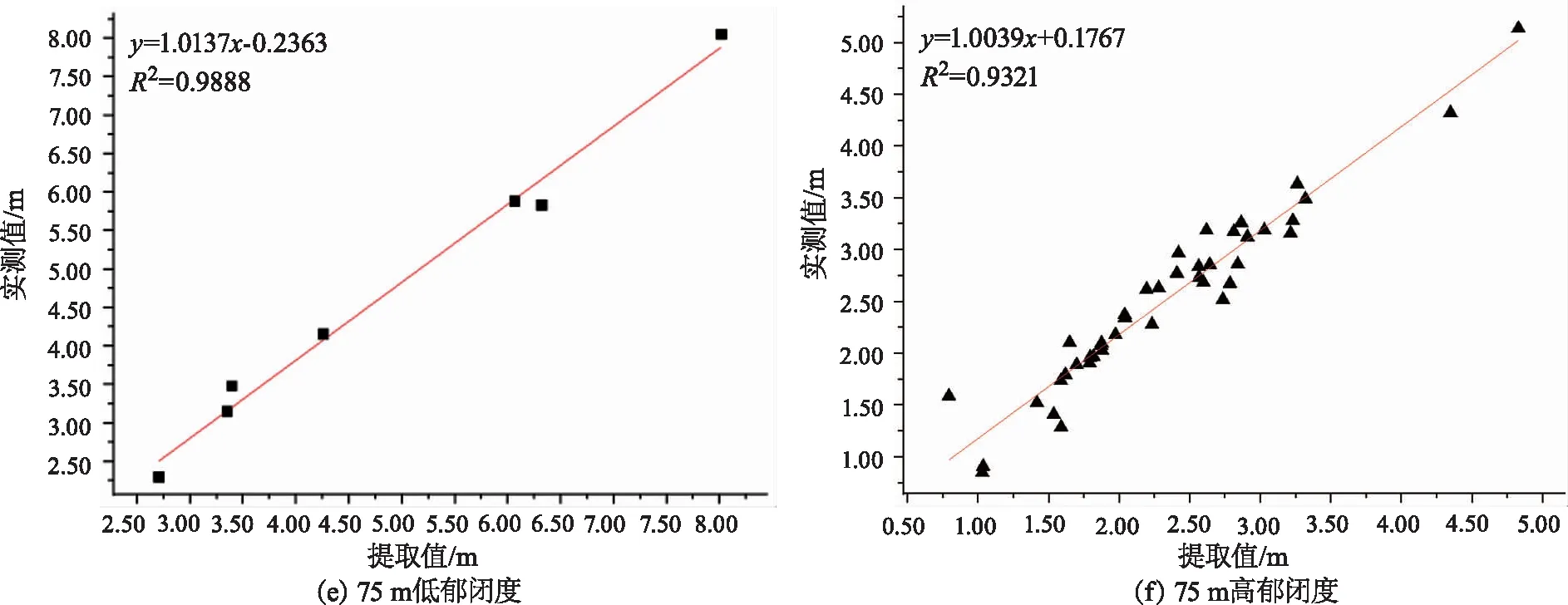
图5 不同飞行高度与不同郁闭度平均冠幅提取值与实测值关系散点图
4 结论与讨论
无人机作为一个近几年新兴的一个平台,运用于各个领域,在林业调查中也发挥着重要的作用。利用无人机获取高分辨率的影像可以快速、准确获取树冠信息,有效地减轻了林业资源调查的工作量并且提高了林业资源调查的效率和精度。本研究以青山湖水杉林作为实验对象,采用面对对象自动提取树冠,分析其可行性,并且分析比较无人机飞行高度与林分郁闭度对自动提取结果的影响。
本研究冠幅精度都在88%以上,平均冠幅实测值与提取值R2都在0.896 2之上,并节省了人力与时间。相较于郭昱杉[25]等采用标记控制的分水岭分割的方法提取冠幅无论是在相对低郁闭度还是相对高郁闭度都得到了一定的提升,其在相对低的郁闭度提取精度为87.8%,在相对高郁闭度提取精度为65.5%。相较于乔正年[17]等,相对较高的郁闭度冠幅提取精度提高了5%。从结果看,利用无人机影像采用面对对象分类提取树冠的方法具有可行性。
对比研究结果,无人机飞行高度对单木树冠的提取有一定的影响,精度随着飞行高度的降低而提高,但就本实验而言,其精度变化较小,可能是因为研究所选高度跨度不够导致,需进一步研究。郁闭度对单木树冠的提取有较大的影响,在相对低郁闭度情况下,由于各树木间距较大,可以较为准确地分离出树冠,其提取精度也较高,都在94%以上,平均冠幅实测值与提取值R2都在0.985 5以上;在相对高郁闭的的情况下,由于树木间距较小,树冠间相连或重叠,因此树冠提取精度较低,提取精度在88%以上,平均冠幅实测值与提取值R2都在0.896 2以上。
通过研究发现,针对65,70,75m这3个不同飞行高度,无论是相对较高郁闭度还是相对较低郁闭度的林分,飞行高度为65m时冠幅提取精度最好。由于本研究只选择65,70,75m这3个不同飞行高度,对于65m以下,75m以上情况,后续需做进一步研究。
论文针对的是人工水杉林树冠的提取,对其它针叶纯林是否具有普照适性,有待研究。另外,无人机所拍摄的影像或多或少会带有一些阴影区,这对树冠提取的精度会产生一定的影响,如何减小阴影所带来的影响也有待进一步研究。