基于改进SIFT算法的无人机航空应急测绘系统设计
2022-03-30国仲凯姚姝娟张桂莲
国仲凯,姚姝娟,张桂莲
(内蒙古自治区航空遥感测绘院,呼和浩特 010010)
0 引言
无人机航空测绘技术近年发展迅速,能够在很大程度上,弥补航空摄影测量手段的不足之处[1]。与当前的卫星遥感方法相比,无人机航空测绘技术具有较高的空间分辨率、较短的操作周期和较强的时效性等应用优势,可在灵活、机动、快速获取高分辨率地表影像数据的同时,构建更为真实的三维纹理模型,在小区域大比例尺测绘领域中具有较为积极的应用价值[2-3]。尽管无人机摄影测量系统的发展前景相对可观,但是现阶段该项技术的应用主要针对有人机或轻小型无人机设备,作为底层遥感平台的无人机体系尚且不够规范。由于无人机飞行器自身的独特性,航空应急测绘系统的发展还需要从多个技术性角度进行不断完善。
当前CH-4航空应急测绘系统利用五镜头倾斜航摄仪作为相机传感器,在优化固定翼无人机运载平台的同时,对各项航测参数进行分析,再从影像同步曝光的角度着手,构建更加稳定的三维信息处理模型。然而此系统在获取光学、视频影像和SAK数据方面存在一定的时间差异性,很难适用于实验区域的地表特征,并为其提供有效的测绘保障[4]。为解决此问题,设计基于改进SIFT算法的无人机航空应急测绘系统,IFT算法是由尺度缩放、平移旋转等多个处理步骤组成的图像处理方法,在图像仿射变换及噪声控制方面都具备较强的稳定性,利用集成传感器与发动机,填补应急测绘系统的硬件执行结构空缺,借助BRISK描述子,确定SIFT算法的实际改进方向,再根据已知的测绘特征点匹配原则,完善系统的执行与处理流程。
1 系统总体架构设计
1.1 系统总体架构分析
无人机航空应急测绘系统以硬件执行环境作为主要集成结构,设计一体化的应急测绘系统方案,在改进SIFT算法的支持下,实现无人机平台与应急测绘软件之间的信息流集成。无人机航空应急测绘系统总体架构主要由遥感信息数据处理、应用传感器、无人机平台三部分共同组成,如图1所示。
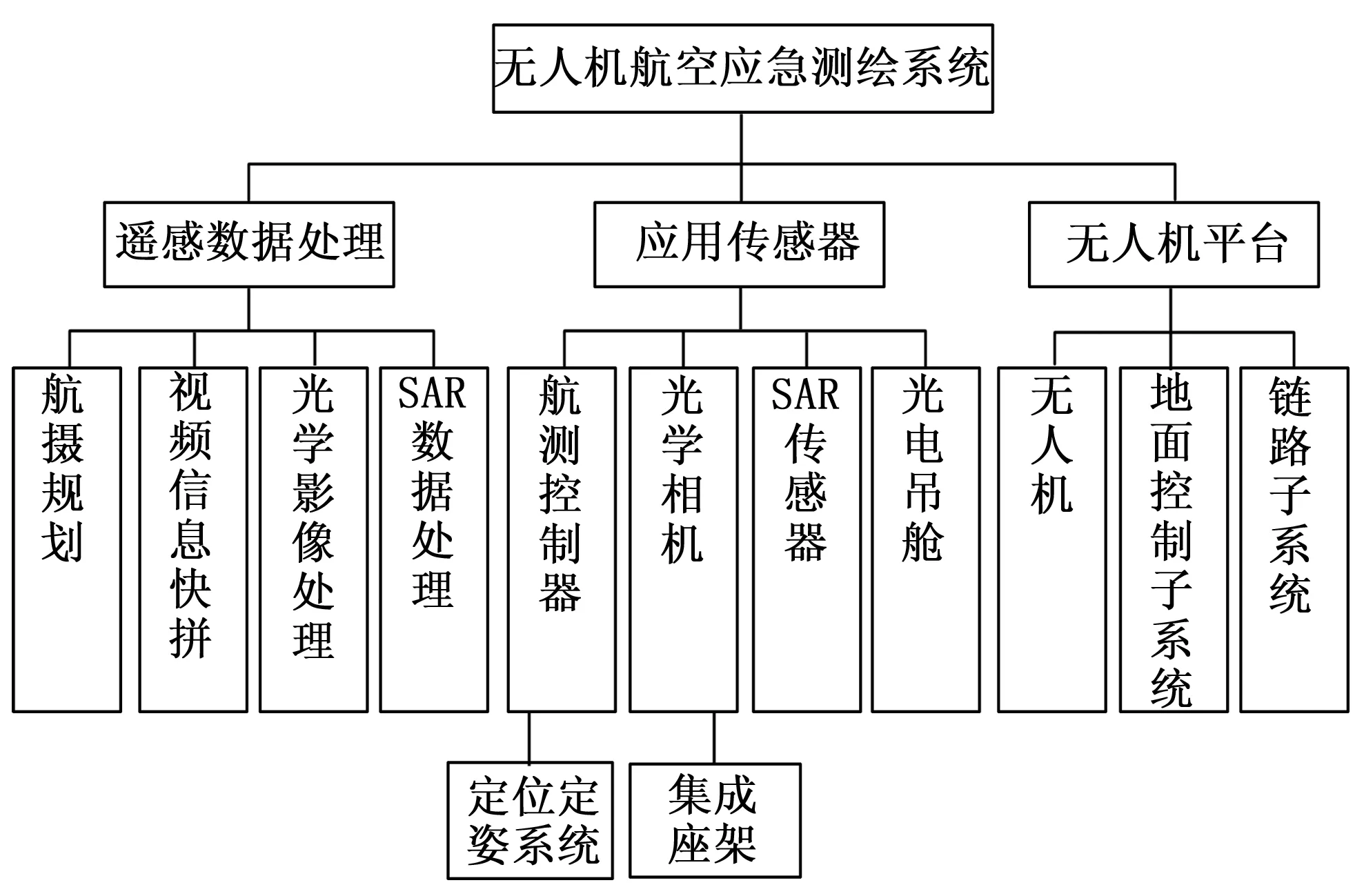
图1 无人机航空应急测绘系统架构
图1中,无人机体系平台则可进一步划分成链路子系统、地面控制子系统和无人机设备主机等应用部分。新型测绘系统的关键作用能力在于第一时间获取飞行区域内的地表特征,并可根据个别数据信息的成图处理原则,满足主机设备平台的深度决策需求。视频影像、光学影像是两种不同的基本测绘信息类型,且都可以直观反映出突发环境中地表环境的概貌情况。在实际应用过程中,夜间、阴雨天等突发测绘事件时有出现,因此,为保障测绘视频信息的清晰度还需设置红外与光谱视频提取装置[5]。此外,为使无人机航空测绘的精度与稳定性能力得到满足,还应该提供定位定姿子系统、集成座架等补充条件。遥感数据处理子系统应具备快速处理影像信息与视频信息的能力,在生成影像图与关键测绘区域影像数据的同时,满足无人机航空的应急保障需求。
1.2 主要系统架构组成
无人机平台的集成同时涉及机械设备研制、飞行能力保障等方面内容。因此,对于航空应急测绘系统的设计而言,应从基本应用平台、任务传感器子系统、遥感数据处理子系统等多个方面对其进行集成与处理能力分析[6]。其测绘系统主要组成结构部件之间的系统架构如图2所示。

图2 测绘系统主要组成结构部件之间的系统架构
图2中,测绘任务传感器元件都需要借助无人机设备为测绘主机提供集中供电与空间测量服务。如视频影像等遥感信息必须借助链路子系统,才能由无人机设备传输到地面控制子系统,与此同时,也可通过链路子系统向外传输测绘控制指令。遥感数据处理子系统不能独立存在,只能与地面控制子系统进行初步集成后,才能处理相关航摄视频影像,从而对实时回传的无人机遥感信息进行快速处理。作为无人机航空应急测绘系统的主控元件,航测控制器既能通过深度采集传感信息的方式,制定具体的航摄规划任务,也可以按照影像数据、位姿数据的传输与存储需求[7]。
2 系统硬件结构设计
无人机航空应急测绘系统的硬件执行环境,以传感器、发动机等元件作为主要集成结构,在原有航空摄影技术的支持下,其一体化设计方案如下:
2.1 传感器
为了保障无人机航空应急测绘系统设计方案的针对性,需要明确传感器子系统各组成部分的参数及具体型号,详情如下:
1)光学相机:PhaseOne iXU-RS1900型号的光学相机传感器在进行无人机应急测绘处理的过程中,其视场角数值可以达到45.7°×33°,当镜头焦距接近100 min时,影像分辨率也能够达到16 470×11 540。为保证光学影像的流畅度,传感器曝光速度应处于1/2 000~1/125 s之间,且随着无人机航行速度的改变,镜头的感光度也应在50~6400之间不断变化[8]。
2)SAR传感器:采用MS-201型号的中科九度传感器元件,无人机航空应急测绘系统SAR传感器结构如图3所示。
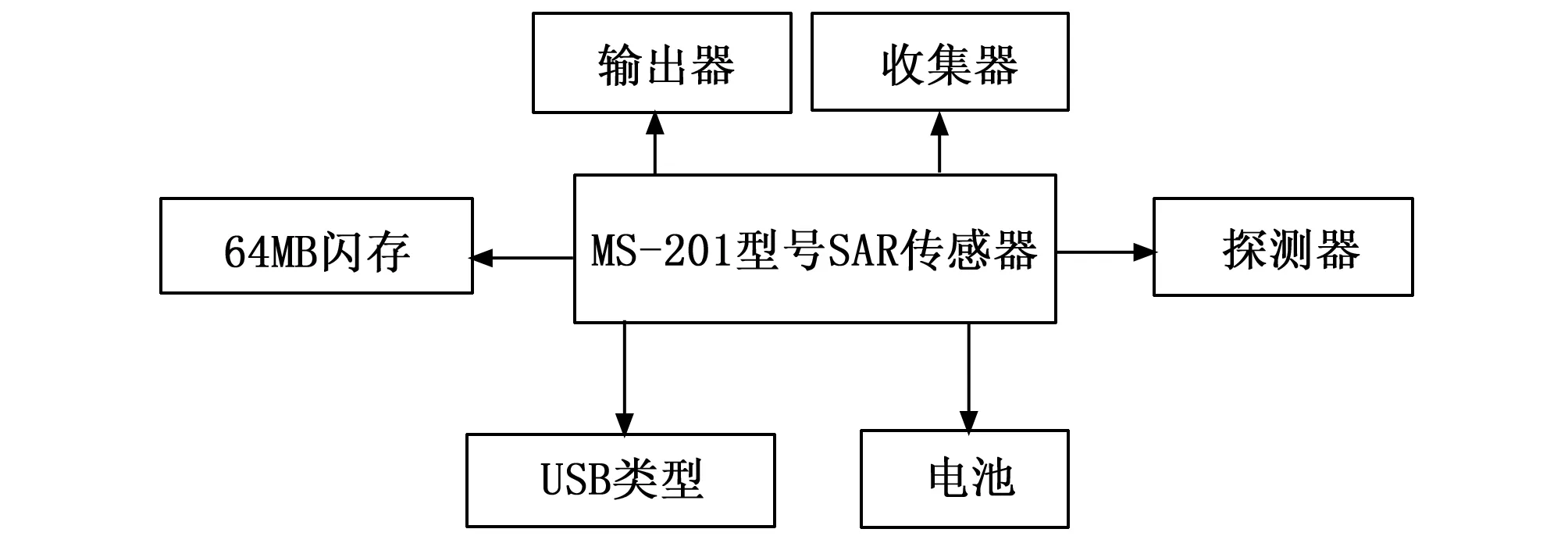
图3 无人机航空应急测绘系统SAR传感器结构图
将其工作频率调整至Ku波段之间,且要求所有视频影像存在聚束与条带两种存在模式,对于测绘图像的有效作用距离来说,在全极化信息同时存在的情况下,其距离数值不得小于5 000 m,一般来说,聚束模式下的无人机视频影像空间分辨率可以达到0.15 m以上,但条带模式下的无人机视频影像空间分辨率则能够达到0.50 m[9]。
3)光电吊舱:最少具备1 920×1 080个可见光视频像元数,而对于红外视频像元数的要求则相对较低,基本上达到640×512个就可以实现对无人机遥感区域地表特征的准确测绘。
4)定位定姿子系统:在无人机测绘节点定位方面,绝对精度需要达到0.01 m以上,但在处理绝对俯仰角与滚动角时,精度数值则可达到0.002 5°,在相对角噪声水平较低的情况下,子系统传感器可直接控制无人机飞行器的行进状态,并可同步完成数据信息回传与控制指令发送[10]。
5)集成座架:横滚姿态调整范围为-10.5~+10.5°、 俯仰姿态调整范围为-10.5~+10.5°、偏流姿态调整范围为-25.0~+25.0°,对于无人机飞行器采取电机伺服控制的传动方式,但由于允许测绘误差的水平较低,故其最大承重能力只能达到35 kg。
2.2 发动机
无人机航空应急测绘系统采用排量较大的DLE120CC发动机提供飞行动力支持,具有更高的汽油利用率,在无人机飞行过程中,可在低能量损耗的情况下,避免空中熄火事件的出现,在飞行动力与安全性方面提供了强有力的保障。DLE120CC发动机结构如图4所示。
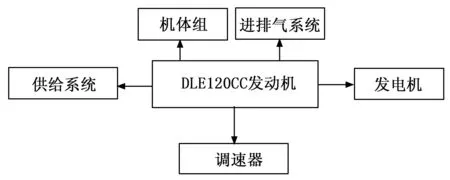
图4 DLE120CC发动机结构图
光学影像、视频影像、SAK数据作为与无人机传感器相关的三类测绘信息参量,可在大排量发动机元件的支持下,从无人机平台直接传输至下级链路子系统中,由于复杂中间传输过程的省略,所有信息参量都可在同一时间到达同一传感器设备,这也是所获数据能够较好满足无人机航空大比例尺测图需求的主要原因[11-12]。由于传感器集成环境的存在,DLE120CC发动机在单位时间内可提供的无人机航空起飞重量能够达到19.8 kg,在应急航程大于300 km时,航空应急测绘系统的续航时间达到了4 h;而当飞行巡航速度处于90~120 km/h之间时,无人机飞行器的抗风性能达到了6级,在此情况下,应急测绘通信数据的最远传输距离也能够达到30 km以上。
2.3 一体化集成结构
无人机航空应急测绘系统的一体化集成可从内部通信、外部接口等多个角度同时进行,无人机航空应急测绘系统一体化集成结构如图5所示。

图5 无人机航空应急测绘系统一体化集成结构
具体设计思路如下:
1)内部通信设计:定位定姿子系统可在通信接口的作用下,向航测控制器发送与无人机相关的姿态信息,元件设备可在存储原始数据信息的同时,对应急测绘处理指令进行重组与解析,完成初步处理后,再将位姿数据信息发送至底层SAR传感器元件之中[13]。底部集成结构在接收到实时位姿数据后,可借助应急处理平台对其进行再一次的调整,从而避免因飞行抖动对光学相机、SAR解算器等设备的平稳运行能力造成影响。
2)外部接口设计:主测绘控制器通过异步传输接口实现无人机平台与遥感数据处理子系统之间的信息互通,包括飞行器位姿数据传输、视频影像数据传输、控制指令传输等几个应用方面,能够在控制量测相机工作状态的同时,对连续的影像数据进行实时回传处理。
3)电气设计:无人机平台只为传感器子系统提供一个独立的供电转接头,但却可通过电源转接线分出4个次级接头分别供给集成座架、定位定姿子系统、SAR、光学相机。为保证传感器子系统具备极强的工作与运行能力,电气网络必须完全覆盖光学相机表面,一方面显示航测控制器元件内部的温度示数值,另一方面读取无人机所处航空环境的温度数值,并在非合理情况下,将温度数值快速调试至合理化状态[14]。
4)结构设计:为了将定位定姿子系统、SAR等设备同时集成在同一个座架结构之上,需要从多个角度对测绘系统的基础机械结构进行设计。座架滑环下端固定SAR体系收发天线与光学相机物理镜头,而座架滑环上端只固定定位定姿子系统,这样的物理结构组合可同时保证测量元件之间的应用便捷性与一体化能力。
3 基于改进SIFT算法的系统软件设计
根据无人机航空应急测绘系统的设计原则,以无人机航空应急测绘系统硬件主要集成结构作为基础,按照SIFT算法原理描述、BRISK描述子计算、特征点匹配、测绘处置流程完成执行步骤,准确规划信息流集成,实现无人机航空应急测绘,针对基于改进SIFT算法的软件集成条件展开研究。基于改进SIFT算法的系统软件设计流程如图6所示。
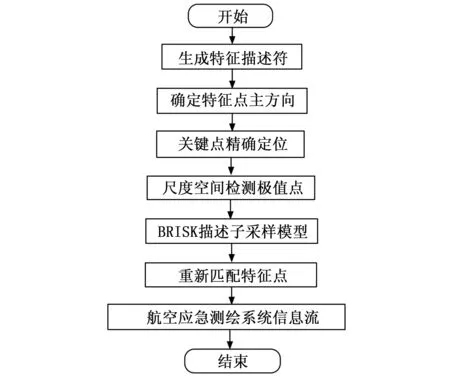
图6 基于改进SIFT算法的系统软件设计流程图
3.1 SIFT算法原理
SIFT算法规定在所选定的无人机航空高斯差分尺度空间(DOG)内,寻找一个极值点作为关键任务节点,再分别提取亮度、旋转、尺度三项不变量条件[15]。具体应用方法由如下几个步骤组成:
1)特征描述符生成:在无人机航空应急测绘系统中,特征描述符是通过统计特征点邻域梯度信息的方式得到的。
2)确定特征点主方向:计算测绘区域中每个像素节点处梯度指标的实际数值,并以此为基础,绘制完整的测绘梯度直方图,其中峰值系数表示了测绘点的邻域梯度主方向[16]。
3)关键点精确定位:通过三维二次函数拟合的方式,精确关键无人机测绘节点所在的位置区间及相关尺度信息,与此同时,剔除不稳定的边缘响应点与对比度较低的候选特征点。
4)尺度空间检测极值点:所生成的无人机航空高斯差分尺度空间中,每一个测绘节点都能保持其初始特征,对比原节点与相邻节点之间的数值差,凸出DOG条件的应用价值。
3.2 BRISK描述子
BRISK描述子计算是SIFT算法改进的必要处理环节。对于无人机航空应急测绘系统来说,BRISK描述子时刻保持较好的旋转不变性与尺度不变性,在执行特定信息指令时,由于描述子指标的存在,SIFT算法改进能力具有较强的可控性。
在实际运算过程中,BRISK描述子只能通过邻域采样的方式获得,也就是说在以特征点为中心的像素块内,依靠同心圆确定BRISK描述子所处的具体位置,且要求所有采样点都必须等间距分布在圆周之上[17]。此外,为完全消除无人机航空测绘光学影像、视频影像和SAK数据之间的传输差异性,应针对所有采样点分别进行滤波性处理。基于改进SIFT算法的BRISK描述子采样模型如图7所示。
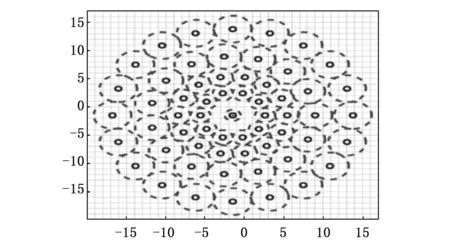
图7 基于改进SIFT算法的BRISK描述子采样模型
设Ω代表采样点对集,pi、pj分别代表两个不同的SIFT改进基向量,i、j代表两个不同的影像数据信息,联立上述物理量,可将BRISK描述子计算表达式定义为:
(1)
式中,N代表采样点对集Ω中的信息元素个数,δmax代表最大距离阈值,δmin代表最小距离阈值。
3.3 特征点匹配
SIFT算法主要是利用欧氏距离判断关键测绘点之间的相似性度量程度,而改进SIFT算法则在BRISK描述子指标的支持下,对相似性度量系数值进行重新定义,从而使得无人机航空应急测绘特征点得到重新匹配[18-19]。具体的测绘特征点匹配定义如下:
(2)
式中,a、b分别为对应无人机航空应急测绘特征点描述符,f为SIFT算法改进趋度值,λ为BRISK描述子的集中作用权限值,ΔT为测绘特征点的单位匹配时长。
3.4 测绘处理流程
无人机航空应急测绘系统中的软件需要在无人机平台上进行集成,一方面需要将所有测绘软件均匀部署在地面控制子系统之中,另一方面也需要从逻辑层面入手,实现无人机平台与应急测绘软件之间的信息流集成,具体处理流程如图8所示。

图8 航空应急测绘系统信息流程图
图8中,若无人机飞行器能够接收到应急测绘指令,相关元件结构则会自发分析突发事件的所属类型,一方面搜集目标航测区域内的测绘数据与资料,并针对其制定严格的航摄规划[20];另一方面也可在满足设备元件应用需求的同时,实施后续的应急测绘计划,从而实现对信息流集成方向的准确规划。至此,实现对SIFT算法的改进与应用,在确保数据信息流集成有效性的前提下,完成无人机航空应急测绘系统的设计。
4 实验结果与分析
为了验证基于改进SIFT算法的无人机航空应急测绘系统的有效性,设计如下对比实验。实验方法分别利用上文所设计的基于改进SIFT算法的无人机航空应急测绘系统和CH-4航空应急测绘系统进行对比分析,其中前者作为实验组、后者作为对照组。
选取面积约为380 km2的实验区域作为实验环境,在实验过程中,控制无人机的相对飞行高度处于950~1 000 m之间、绝对飞行高度处于1 500~1 600 m之间。规定飞行测绘任务的单次光学影像分辨率为0.1 m,共计飞行了5条航线。对获取到的视频数据、光学影像和SAR数据进行处理,处理结果如图9~ 11所示。
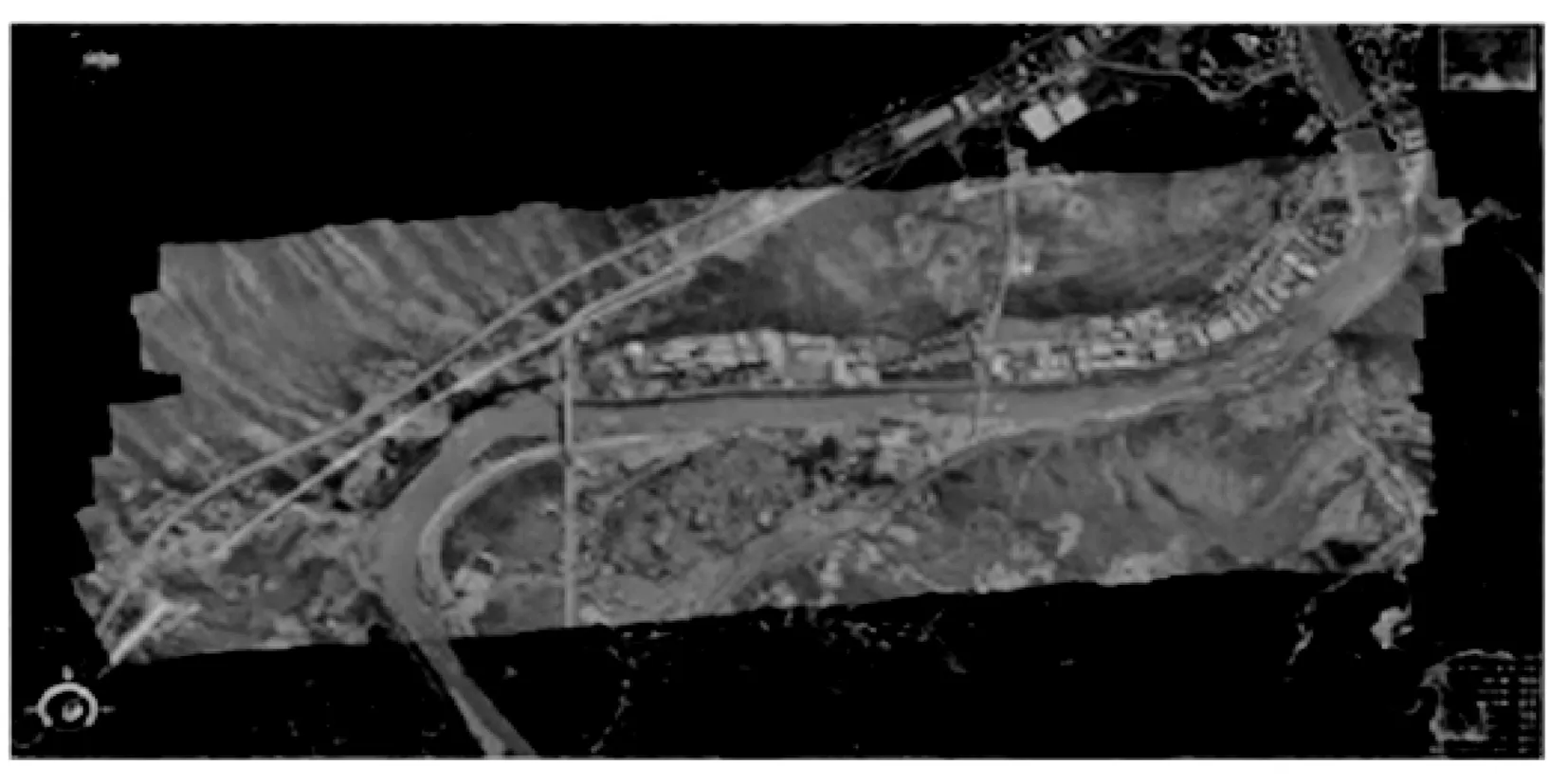
图9 视频数据处理结果

图10 光学影像处理结果

图11 SAR数据处理结果
实验步骤主要是采用实验对比方法,对已集成的无人机数据信息流进行处理,获取上述视频数据、光学影像和SAR数据处理结果,并采集记录实验过程中5条航线内的频率和空频时间进行对比分析。实验组和对照组视频数据、光学影像和SAR数据频率及空频时间的具体变化情况如表1和表2所示。

表1 实验组实验数值记录
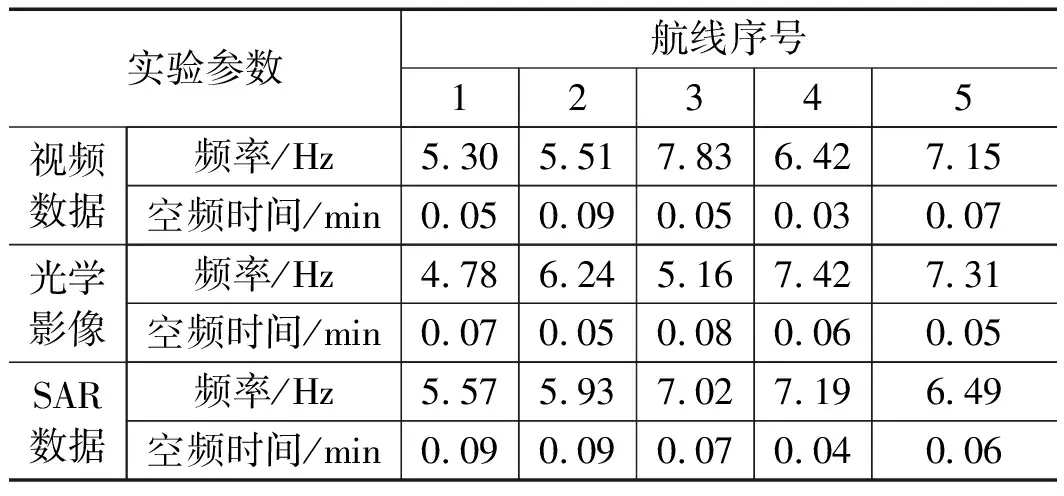
表2 对照组实验数值记录
分析表1和表2可知,实验组视频数据、光学影像、SAR数据频率均未出现过高或过低的表现数值,且空频时间也基本能够保持相对稳定的状态。其中,实验组视频数据、光学影像、SAR数据中频率的最大值为7.06 Hz,空频时间的最大值为0.03,且整个实验过程中,数据频率最大值、空频时间最大值均出现在SAR数据分组中。而对照组视频数据、光学影像、SAR数据频率的变化形式并无明显规律,整个实验过程中的最大数值结果出现在视频数据分组、最小数值结果出现在光学影像分组,二者差值为3.05 Hz,高于实验组数值。空频时间最大值出现在视频数据与SAR数据分组、最小值出现在视频数据分组,二者间差值为0.06 min,也高于实验组数值。
综合上述对比可知,在固定测绘区域中,应用基于改进SIFT算法的无人机航空应急测绘系统,可实现对多航线视频数据、光学影像和SAR数据频率与空频时间的有效控制,这在很大程度上能够促进数据信号的同步收集,从而满足绘制无人机航空大比例尺测图的实际应用需求。
4 结束语
为了有效满足无人机航空大比例尺测图的实际应用需求,设计基于改进SIFT算法的无人机航空应急测绘系统。对当前SIFT算法进行改进,联合光学相机、SAR传感器、光电吊舱等多个硬件执行设备,建立一体化的应用集成环境,结合BRISK描述子及特征点匹配原则,对实际测绘处理流程进行不断完善。实验结果表明,随着该系统的应用,视频数据、光学影像、SAR数据的频率及空频时间均不会出现明显波动的变化趋势,可适用于航空摄影地表特征的同时,为无人机应急测绘提供强而有力的应用保障。
