四旋翼无人机长续航飞行模式的设计与实现
2022-03-30郎武彪韦峻峰
郎武彪,韦峻峰
(广西民族大学 电子信息学院,南宁 530006)
0 引言
无人机在许多行业领域中有着非常广泛的应用。在农业方面,目前市面上用于植保的6 kg电池供电旋翼无人机飞行时间约30 min左右,在完成喷洒农药等耗时的飞行任务时需要多次返航更换电池[1]。若可以延长其飞行时间将提升工作效率。
目前已有通过减轻自重、增加电池容量、改进推进系统、优化控制算法[2]等方式延长无人机的飞行时间。无人机使用的能量来源主要有燃料电池[1]、太阳能辅助供电[3]、发电机加电池[4]等多种,采用高能量密度的供电方案是未来无人机发展方向。此外,三旋翼[5]、共轴双旋翼[6]、电机与电子调速器匹配[7]等推进系统的研究使无人机的能量利用效率进一步提升。这些研究从不同的侧面提升了无人机的飞行时间。
对于已有产品,自重、电池容量和推进系统设计已经确定,通过控制算法优化仍有可能延长飞行时间。根据动力学模型,多旋翼无人机需要靠不同电机转速来维持不同的飞行姿态。电机消耗的功率与其在不同转速下的工作效率密切相关。研究[8]发现,重量1.5 kg电池容量6 600 mAh的无人机持续垂直运动的飞行时间20.8 min最短、水平运动时飞行时间22.5 min,悬停状态的飞行时间长达26.7 min。涡喷类长航时无人机巡航段最有利航程和飞行时间的研究[9]同样揭示了无人机的飞行时间受不同的高度、速度控制策略影响。旋翼无人机通过飞行姿态改变飞行的高度、速度和方向,不同飞行姿态对飞行时间的影响将会比涡喷无人机更为显著。因此有可能设计出适合于旋翼无人机的长续航飞行模式。
1 飞行姿态和功率消耗的关系
无人机在飞行过程中不同姿态的空间受力不同,在不同姿态下螺旋桨受到的诱导阻力、平移阻力、形状阻力也不同[10],因此在不同飞行姿态下流过电机的电流存在差异。不同飞行姿态影响到锂电池的放电性能,进而造成了电池消耗速率的差异。供电锂聚合物电池使用过程中的放电性能除了会受到温度、环境等方面的影响外还会受到电池放电倍率的影响[11]。根据锂电池放电特性,当电池放电电流增大时,放电电压会变小。电池电压下降时,为了保证放电功率的稳定输出,需进一步增大锂电池放电电流,过大的放电电流导致锂电池的持续放电时间大大缩短[12]。
下面将对无人机不同飞行姿态进行空间受力分析,以说明不同飞行姿态与无人机电流消耗的关系。
1.1 悬停状态
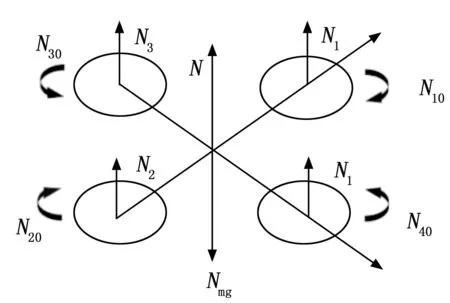
图1 悬停状态受力分析
根据刚体理论,将四旋翼无人机简化成以无人机机身为中心、具有十字型力臂的刚体。如图1,不考虑梁的形变的情况下,可以合并4个旋翼中单个旋翼产生的作用力为垂直于旋翼平面竖直向上的升力N[13]。对于重力,要维持悬停状态只需产生和自身所受重力大小一样、方向相反的推力N即可,即:
N=N10+N20+N30+N40=Nmg
(1)
对于旋转产生的力矩,四旋翼无人机常采用对角电机同向旋转、相邻电机反向旋转的设计,力矩相互抵消。若忽略其他阻力的作用,可近似认为无人机旋翼产生的力除了扭矩之外是完全做功的。因此悬停状态下无人机对电池的消耗将会比其他飞行姿态小。
1.2 俯仰状态
如图2所示,当遥控操作四旋翼无人机从悬停状态改变飞行姿态,使无人机维持飞行高度但机身倾斜,需调整电机转速使推力方向变化角度θ。为保持高度,竖直方向的分力Nc与重力Nmg保持相等,于是有:
Nc=Nmg=Ncosθ
(2)

图2 俯仰状态受力分析
在0~90°之间余弦值会随着角度的增大逐渐变小,且比线性递减速度更快,导致在进行大角度控制时需要电机提供的输出合力N呈现非线性递增。电池的输出电流随姿态角增大而非线性增大,在大姿态角状态飞行时,电池消耗更快。
1.3 偏航状态
如图3所示,当四旋翼无人机进行偏航控制时,需同时改变对角上两个电机的转速,使螺旋桨产生的总扭矩不为零,无人机沿着竖直轴转动。为确保N=Nmg,一对对角电机转速的降低引起推力降低(如图中N30和N40),就需要另一对对角电机转速提高以提供更大的推力(如图中N10和N20),使竖直方向上合力不变。这种飞行状态下,电池消耗电流与悬停状态基本一致。

图3 偏航状态受力分析
2 飞行控制算法
对无人机不同飞行姿态空间受力分析发现,飞行姿态角θ与推力N并不是线性关系,随着θ增大N增大,导致电流消耗更快增大、电池输出电压下降、放电时间减少,无人机飞行时间降低。在无需快速变化飞行姿态角、无需维持大姿态角高速飞行的工作场景中,基于目前广泛使用的PID飞行控制算法,设计一种限制无人机飞行姿态角度变化大小的长续航飞行模式将可以有效地增加无人机的续航。
经典PID控制系统如图4所示。给定一个被控对象的控制期望值M(t),测量被控对象的实际输出值m(t),计算控制偏差M(t)-m(t),同时计算该偏差的比例、微分、积分结果,分别得到当前偏差、预测偏差和历史偏差,然后将其相加作为被控对象的输入y(t):
(3)
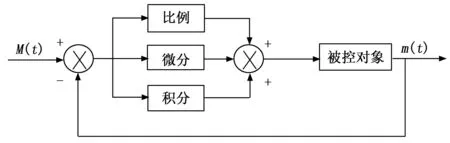
图4 PID控制系统
再将其进行拉普拉斯变换,整理后得到传递函数H(s):
(4)
其中:比例系数Kp、积分时间常数Ti和微分时间常数Td需根据不同系统调整。
目前主流的无人机的飞行控制算法是角速度环加角度环的串级PID控制算法[14],通过变换飞行姿态角使无人机朝着不同方向飞行。为了保证更长时间的续航,姿态角越小越好,但是在实际的应用需求中,需要更大的加速度去抵消风速等外界因素。因此需要对飞行姿态角度进行限幅控制又要不影响无人机正常控制飞行。单纯的角速度环加角度环的串级PID姿态控制器将不再适用。
2.1 长续航飞行模式
在实际使用四旋翼飞行器的场景中常需要控制飞行速度,并且,限制姿态角过大可以防止电池过快的消耗,由遥控控制飞行速度而不是姿态角是有意义的[15]。在长续航飞行模式下,无人机悬停在空中。若接收到遥控器发出的某水平方向飞行指令时,无人机从悬停状态进入俯仰状态,调整俯仰方向的姿态角,获取加速度朝遥控方向加速飞行。若对无人机的姿态角进行限幅,获取到的加速度会变小,但经过一段时间加速依然可以达到遥控器设定的速度。之后,无人机进行姿态调整保持一个微小的姿态角,产生一个微小的力N2去克服空气中的其他阻力,从而进入定速飞行。该飞行状态下,电池的损耗比悬停多一些。长续航飞行模式的总体设计流程如图5所示。
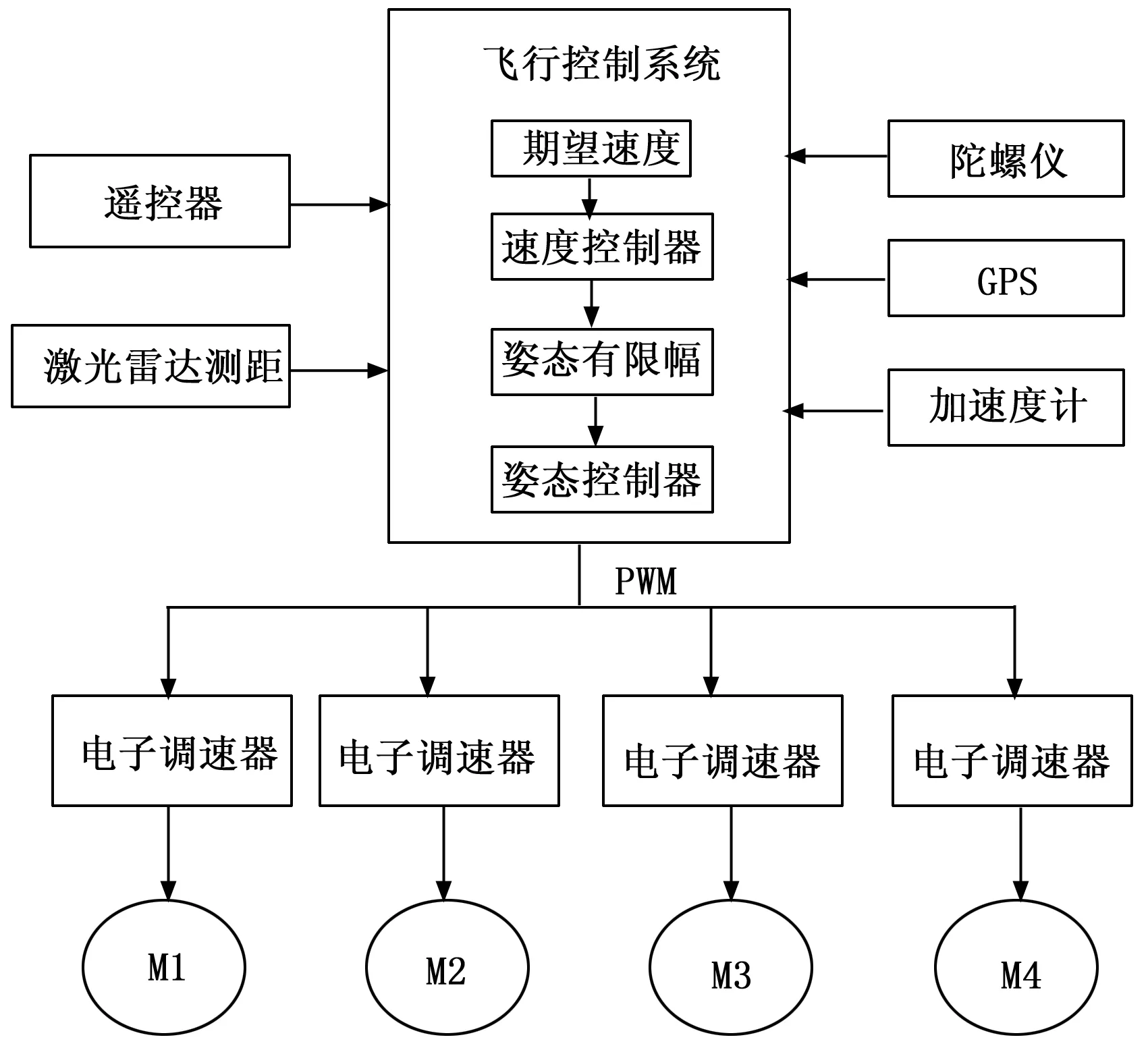
图5 长续航模式总体流程
飞行控制系统接收到遥控器发出的控制信号后,将遥控器打杆行程量转化为对应的速度期望,送入速度控制器。速度控制器输出的是一个期望加速度,通过对其进行航向分解变为横滚和俯仰方向上的期望角,再通过限幅控制之后再将限幅得到的期望角作为姿态控制器的输入进行姿态控制,通过姿态控制后得到输出控制电机的信号改变飞行姿态,进入俯仰状态加速飞行。同时将实时的飞行姿态反馈给姿态控制器,实时的飞行速度反馈给速度控制器。当飞行速度到达目标速度时,就可以进入定速飞行状态,保持一定的倾斜角度去抵消飞行过程的阻力。
2.2 实时速度
速度控制的长续航飞行模式PID算法需要获得无人机的实际飞行速度。若采用加速度积分的方式,长时间工作结果有可能产生较大的误差。采用光流估计飞行速度,结果准确性可能受到光照条件、粉尘烟雾等影响。为得到更加精确的实时飞行速度,需借助卫星导航获取位置信息作为辅助,共同解算实际飞行速度[16]。加速度与卫星组合导航的模块如图6所示。

图6 组合导航流程
从卫星获取的是导航系下的正东或者正北方向上的运动速度,但在遥控无人机时进行的速度控制是机体的俯仰或者横滚方向的速度控制。因此需要把对于正北和正东方向的速度换算到机体的俯仰方向上的速度Vd和横滚方向上的速度Vr,方法如下:
Vd=Ve*sinφ+Vn*cosφ
(5)
Vr=Ve*cosφ+Vn*sinφ
(6)
式中,φ为正北方向和俯仰方向的夹角。
为实现速度控制,在角速度环和角度环的串级PID姿态控制器基础上加入一个速度PID控制器实现三环PID控制对飞行速度进行控制。控制流程如图7所示。其中外环为速度PID控制器,内环为姿态控制器,通过遥控器获得期望速度作为外环速度控制器的输入。加速度计和卫星获取的速度联合解算得到实际飞行速度,并计算出速度误差作为速度PID输入。

图7 三级PID速度控制流程
外环速度PID控制器输出的是期望加速度。IMU获取姿态信息进行姿态解算出实际加速度,从而计算得到加速度误差送入姿态控制器。姿态控制器输出对应的控制信号去驱动电调控制电机转速,实现对无人机的姿态控制。以此来实现整个长续航飞行模式的精准控制。
3 实验验证
首先测量了不同姿态角下无人机电池电压和消耗电流,通过实验设定长续航飞行模式下无人机飞行的最大姿态角。而后,通过同一台飞机采用不同的控制算法对比续航情况,测量长续航飞行模式实际能够延长的飞行时间。
实验装置如图8所示。使用螺丝将四旋翼无人机的机架下底板与万向实验台上板固定,将万向实验台底部支撑进行固定,防止测试过程中万向实验台发生侧翻。当启动四旋翼,加大油门直到四旋翼可以在万向实验台自动恢复水平状态,且四旋翼在受到外部手动干扰依然能保证稳定的情况下可以开始进行实验。

图8 测试云台照片
3.1 飞行姿态角和加速度测量
飞行姿态角测量数据来自于6轴传感器MPU6050,图9给出了该器件的原理。传感器内部集成了 3 轴陀螺仪和 3 轴加速度传感器,通过 I2C 接口向飞行控制器输出陀螺仪解算的姿态角和加速度。

图9 姿态模块电路
3.2 电池电量消耗测量
为获得无人机系统瞬时消耗功率,需要测量工作状态中电池放电电压和电流。实验中使用了双向高精度低高压侧电流、功率监控芯片INA226。该芯片量程为36 V,同样具有I2C接口,外置2 mΩ采样电阻。飞行控制系统可方便读取电压、电流和瞬时功率,并连同姿态角上传到PC端上位机显示存储。
通过实验测出在不同的飞行姿态角度下无人机供电电池的电压和电流以验证前述飞行姿态和功率消耗的关系。姿态角取0~32°,每个角度进行10次实验,每次实验电压、电流取100次平均,结果如图10所示。
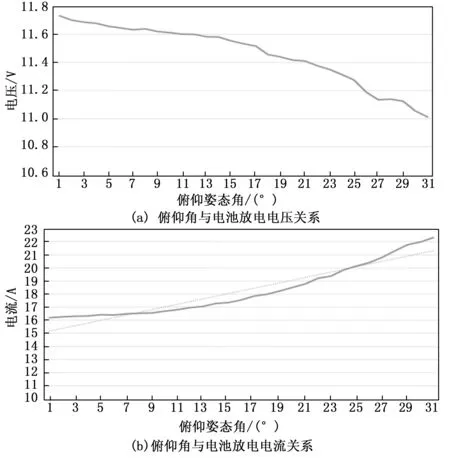
图10 俯仰角与电池放电测量结果
根据实验结果,当无人机飞行姿态角越大时,电池放电电压和电流就会越大,在小于约13°时,随着姿态角增大电池放电电流呈近似线性的平缓上升趋势,类似的电池电压近似线性平缓下降。姿态角大于13°后,放电电流快速上升,电池内阻分压提高,导致电池放电电压下降,造成了额外的功率消耗。由此可见,限制姿态角可以更高效地利用电池能量,实现更长时间的续航。
3.3 整机飞行实验
在实验机上设计了基于传统加速度PID控制的飞行模式和基于速度PID控制的长续航飞行模式,分别在电池满电量和电池50%电量两种状态下,在室外无风、室外微风以及室外强风3种不同的飞行条件下,遥控器满打杆量飞行,对比长续航模式和传统模式实际飞行时间。在满电量状态下飞行时间结果如表1所示。

表1 满电状态飞行时间 s
在电池满电量的状态下,对于传统模式,微风时、强风时的飞行时间分别时无风时的94%和83%,说明风速增加了无人机的飞行阻力,减少了飞行时间。无风时、微风时和强风时,长续航飞行模式分别延长了14%、15%和20%的飞行时间。
在电池50%电量的状态下飞行时间结果如表2。50%电量下,无风、微风和强风环境下传统模式飞行时间分别为满电量的40%、39%和36%。与传统飞行模式总飞行时间相比,在无风、微风和强风环境下长续航飞行模式分别延长了8.0%、7.6%和8.1%飞行时间。

表2 在50%电量状态飞行时间 s
4 结束语
四旋翼无人机在持续大姿态角飞行状态下电池的电量利用率降低,由此设计了一种基于飞行速度PID控制、限制大姿态角的长续航飞行模式。在电池满电和电池50%电量的两种状态下,且在室外无风、微风以及强风3种不同的飞行条件下的实验表明限制过大的飞行姿态角可有效地延长电池的使用时间。通过飞控软件升级即可将长续航飞行模式应用于已有无人机硬件,可广泛应用于无需快速变换飞行路径但需要更长飞行时间的的应用场景中。未来,通过学习无人机飞手的操作,分析容易造成电池损耗的操作环节,并针对性地采用优化飞行方案代替手动遥控,将可能进一步挖掘和提高无人机电池的能量利用效率,延长飞行时间。
