机械式停车设备运行过程故障诊断研究
2022-03-29毛雨晗李传磊刘恩频
金 彦 毛雨晗 李传磊 刘恩频
上海市特种设备监督检验技术研究院 上海 200062
0 引言
随着汽车保有量的大幅提升,城市停车难的问题日益严峻,机械式停车设备因其占地空间小、存车量大的优势而得到快速发展[1]。机械式停车设备由钢结构或混凝土组装,钢结构一般通过焊接、螺栓、铆钉等连接方式将H形钢、槽钢、角钢等组成主体框架结构;机构主要由升降系统、横移系统、旋转系统、转换系统、循环系统等组成;主要零部件和电气控制系统复杂多样。为保证设备的安全运行,国家标准规定必须加装多种安全保护装置,但由于复杂的运行模式及控制逻辑,导致故障率相对较高。
机械式停车设备的故障易导致车辆损伤甚至人员伤亡,与社会民生息息相关,引起社会的广泛关注[2],其安全性也成为当前研究的热点问题。由于升降横移类在机械式停车设备总量中占比超过80%,因此,目前的研究聚焦于该型设备,主要针对存取车过程中的运行危险[3]、框架结构力学分析[4]、螺栓失效分析[5]、事故案例分析[6]等方面开展研究工作。但对于机械式停车设备运行过程中的故障诊断,尚未提出较为系统的研究方法。
本文以典型的平面移动类机械式停车设备为研究对象,从人-机-环3因素出发,全方位开展运行过程中的故障诊断方法研究,为实际应用奠定基础。
1 危险源辨识
为了系统识别在机械式停车设备运行过程中所有阶段可合理预见的危险、危险状态或危险事件,以平面移动类机械式停车设备为典型案例,从人-机-环3因素全方位开展研究。
人因危险源主要包括:企业管理制度缺失、人员资质能力不足、违章作业、防护措施不当、人员培训缺失等。
机因危险源从结构、机构、主要零部件、电气系统、安全保护装置5个方面,作为5个单元进行解析,机因危险源如表1所示。

表1 机因危险源
环因危险源主要包括:风、雨、雪等天气因素,以及腐蚀、锈蚀、地基承载不足、电网问题、通信较差、排水问题、照明不足等。
人因、环因的危险源,采用作业条件风险程度评价方法进行风险分级管控,而对于机因危险源则需通过传感器在线监测采集相应的动态特性参数进一步分析。
2 多传感器在线监测
机因危险源涉及机械、电气、力学等多个学科,为提升分析结果的准确性,本研究提出基于多传感器信息融合技术,采集应力应变、振动、电流、噪声等多种动态特性参数,对机械式停车设备的运行过程进行在线监测。
采用无线动态电阻应变仪对停车设备的立柱进行监测,采集设备运行过程中的应力应变信息,通过在线监测获得运行过程的振动特性曲线,如图1、图2所示。

图1 应力应变传感器
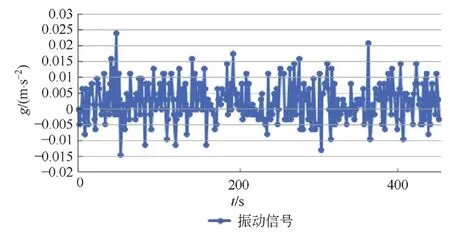
图2 振动特性曲线
3 模式识别
融合多种传感器的信息具有非线性,需要通过特征提取进行故障诊断。
通过提取绝对值积分、过零点数、Willison幅值、直方图等参数进行时域分析,很难获取精度高、分离度大的特征信息。通过Fourier变换转换为频域信号,对其进行频谱或功率谱分析,只能反映信号的频率特性,无法获取时域的相关信息,且不能反映信号的局部特性。自回归模型将生理信号看作是分段平稳的信号,短时间间隔中二阶矩具有良好的平稳性,模型参数可表征随机信号中的确定性信息。因其线性处理方法运算速度快的优点,成为时间序列分析方法中最常使用的模型。然而,单纯基于时域或频域信息的特征提取方法很难完全表征多传感器信息的内在状态。
小波变换是Fourier变换的新发展,具有良好的时频局部化特性,对于不同状态的生理信号,可表征不同尺度下的频率变化和时序特性,实现时变谱分析,且对噪声不敏感,故在信号特征提取方面成为研究的热点。在小波分析中,只对低频细节做二次分解,而小波包变换同时对低频、高频信息进行二次分解,提供了比小波变换更高的分辨率,具有多尺度分析能力。
本研究提出基于WPT-SampEn能量比的特征提取方法,信号被分解成j层时,整个信号空间被分解成2j个子空间,第n个子空间的信号为

因小波函数是相互正交的,由式(1)重构该子空间信号的能量为

则整个信号的能量为

采用j层小波包分解,则各子空间相对能量的特征向量为

由式(1)~式(4),WPT-SampEn的能量比函数可表示为

式中:m为维数,一般取1或2;r为给定阈值;B为复杂性测度函数。
以此函数对训练数据和测试数据进行重构,建立下一步特征分类的训练及测试特征样本。
不同的特征向量需根据空间分布特性选择不同的分类器。在模式识别研究中,最常用的方法包括:最大似然分类、聚类分析、支持向量机、模糊理论、人工神经网络等。然而聚类分析通常用于特征样本已分组的数据;SVM不能直接用于多个模式问题,需通过组合的形式实现;FT建立精确的隶属函数难度很大。人工神经网络算法在多传感器信息融合分析中,具有较好的收敛效果和效率。
4 结果及分析
以平面移动类机械式停车设备为典型案例,对提出的方法进行验证分析。通过基于WPT-SampEn能量比的特征提取和人工神经网络的特征分类,完成正常与故障状态的模式识别,分析结果如表2所示。当WPTSampEn能量比超过0.95时,表明设备存在故障。对于故障诊断的可靠性,由人工神经网络算法学习训练的数据库决定,数据库越大则可靠性越高。
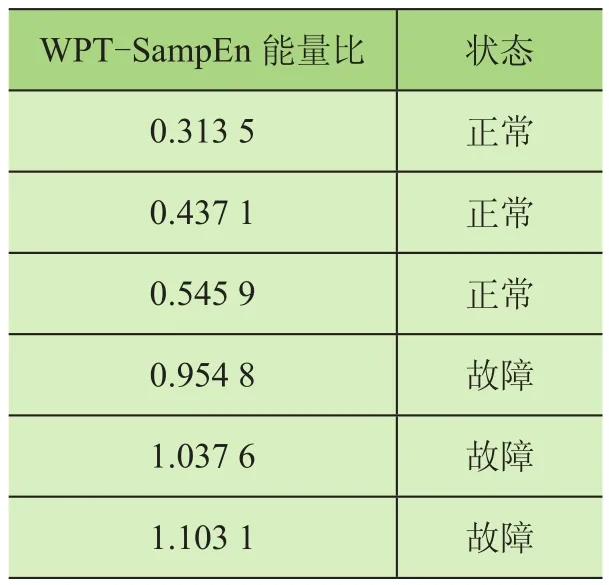
表2 模式识别结果
5 结论
针对机械式停车设备,从人-机-环3方面出发,以大量事故案例为基础,建立了危险源辨识模型。对于机因,以结构、机构、主要零部件、电气系统、安全保护装置5个单元综合考虑,采用多传感器在线监测对采集的数据进行信息融合、特征提取、特征分类,实现了正常与故障状态的模式识别。以平面移动类机械式停车设备为典型案例进行验证,分析结果表明该方法具有良好的分析精度和可靠性。