空间双臂机器人抓捕非合作目标后的协调稳定控制
2022-03-29夏鹏程罗建军王明明谭龙玉
夏鹏程,罗建军,王明明,*,谭龙玉
1.西北工业大学 深圳研究院,深圳 518057
2.西北工业大学 航天动力学国家重点实验室,西安 710072 3.上海航天控制技术研究所,上海 201109
近年来,随着空间技术与应用的发展,利用空间机器人维修失效卫星、操控非合作目标等在轨服务任务日益引人关注。空间多臂机器人相较于空间单臂机器人,具有更强的操作能力和更广泛的应用,但操作更为复杂。因此,空间多臂机器人捕获非合作目标的操控技术成为当前研究的热点和完成任务的关键。空间多臂机器人捕获非合作目标的过程可分为抓捕前、抓捕中和抓捕后等三个阶段。本文研究空间双臂机器人抓捕非合作目标后的安全协调稳定控制问题。
针对空间机器人抓捕非合作目标后的稳定控制,相关研究一般将该阶段的控制问题拆分为两个子问题:期望轨迹规划问题和跟踪控制问题。为了规划空间机器人稳定目标运动的期望轨迹,研究者们通常将抓捕后阶段的稳定轨迹规划问题转化为优化问题进行求解。对于惯性参数无法准确获得的非合作目标,通常利用其惯性参数的估计值规划参考期望运动轨迹。Yoshida等从能量分配的角度规划了空间机器人的运动轨迹。Zappa等则从动量守恒的角度,规划自由飞行机器人的期望运动轨迹。Wang等利用样条曲线对空间机器人的关节运动进行参数化处理,提出了针对冗余机械臂的轨迹规划方法。Yu等利用机械臂的冗余度,提出了一种考虑优先级的空间多臂机器人期望轨迹规划方法。在抓捕后阶段,由于目标惯性参数无法准确地获得,因而无法有效地控制空间机器人跟踪期望运动轨迹从而实现目标的稳定。为了避免目标不确定性对基座运动控制的影响,Sharf等提出了基座无扰的稳定控制策略。Abiko等则考虑目标不确定性对期望轨迹跟踪的影响,根据目标的不确定性设计了自适应稳定控制器。由于非合作目标的惯性参数具有不确定性,加之上述控制方法未考虑控制过程中机械臂末端受到的接触力与力矩,空间机器人无法在规划的接触力范围内跟踪参考期望运动,无法保证空间机器人与目标交互的安全。
为了实现抓捕后阶段机器人与目标与交互的柔顺和安全,降低机械臂末端与目标之间的接触力/力矩,研究者们将柔顺控制方法引入到空间机器人抓捕目标的相关研究中。柔顺控制方法通过设计控制律,将机器人与目标的交互过程等效为一个质量-弹簧-阻尼系统,继而实现交互过程可控的柔顺接触。描述该质量-弹簧-阻尼系统的等式被称为柔顺等式。为了保证机械臂末端的接触安全,Yoshida等根据柔顺等式提出了空间机器人的阻抗控制方法,设计了调整柔顺等式参数的自适应律,根据接触力与力矩调整跟踪控制律,实现交互过程中的柔顺接触。Wang等利用柔顺等式提出了期望运动轨迹的调整方法,通过调整期望轨迹实现了目标稳定过程中的接触柔顺,使得跟踪控制器的控制性能不受接触力与力矩的影响。Stolfi等将一般的位置跟踪控制与柔顺控制相结合,提出了力/位混合控制方法,仅在需要实现柔顺接触的方向进行柔顺控制。然而上述研究仅针对单臂空间机器人,而且只考虑了目标惯性参数不确定性对接触力与力矩的影响。当双臂同时操控被抓捕目标时,双臂对目标会产生拉扯/挤压作用,可能对目标会造成损伤,机械臂末端与目标之间可能产生过大的接触力与力矩,因此,利用空间双臂机器人稳定和操控非合作目标时,除了需要考虑目标不确定性对接触力与力矩的影响,还需要进一步地考虑双臂拉扯/挤压目标产生的接触力与力矩影响。
针对空间双臂机器人抓捕非合作目标后的安全稳定问题,同时考虑非合作目标惯性参数的不确定性以及双臂操控目标的拉扯/挤压作用,提出了一种协调稳定控制方法,通过协调地控制双臂的运动实现双臂末端与目标接触柔顺,降低稳定过程中产生的接触力与力矩。首先,利用目标惯性参数的估值规划稳定目标的运动轨迹。然后,针对目标惯性参数不确定性,对规划的目标稳定轨迹进行调整;同时,基于抓捕矩阵零空间内存在不影响目标运动的无效运动旋量反应了双臂对目标的拉扯/挤压,对双臂末端的期望运动进行调整;根据运动学约束求解逆运动学得到双臂运动协调的安全稳定运动轨迹;在设计的控制性能范围内对安全稳定运动轨迹进行有效跟踪,协调地控制双臂运动实现接触柔顺的安全稳定控制。最后,通过仿真算例验证了本文协调稳定控制方法的有效性。
1 动力学建模
研究对象空间双臂机器人如图1所示。该空间机器人由两个对称安装的七关节空间机械臂和可以六自由度运动的基座组成。在空间双臂机器人捕获非合作目标的抓捕后阶段,空间机械臂的末端与目标固连形成组合体。

图1 空间双臂机器人抓捕目标示意图Fig.1 Snapshot of a dual-arm space robot capturing a target



用表示向量∈R对应的反对称矩阵。为了便于定义目标的六自由度运动,根据向量,∈R定义运算:


式中:为目标的惯性矩阵;为目标质心到抓捕点的雅可比矩阵即抓捕矩阵。由于抓捕后阶段目标与空间机器人双臂的末端在抓捕点处固定连接,因此目标与空间机器人的运动满足运动学约束:


2 安全稳定控制问题分析
当空间机器人的双臂同时作用于非合作目标时,描述末端接触力与力矩的旋量和作用于目标质心的运动旋量满足:

式中:运动旋量∈R被称为控制目标运动的有效运动旋量。与空间单臂机器人不同,当两个机械臂同时作用于目标时,在雅可比矩阵的零空间内会产生不影响目标运动的无效运动旋量,其表达式为

式中:†表示矩阵的广义逆;∈R为单位矩阵;∈R为反应拉扯、挤压程度的旋量。无效运动旋量反映了两个机械臂与目标之间的拉扯/挤压,会对机械臂末端的接触力/力矩产生影响。因此,为了机械臂末端与目标接触的安全,需要在控制空间机器人的过程中考虑无效运动旋量的影响。
除此之外,由于非合作目标的惯性参数无法准确获得,通常利用目标惯性参数的估值规划稳定其运动的参考期望轨迹。根据式(3)中的目标动力学方程可知,参考期望轨迹满足动力学约束为



由此关系不难看出,因为参数估计值与真值之间存在误差,跟踪参考期望轨迹并不一定能够满足规划的接触力与力矩约束,因此跟踪参考期望轨迹存在威胁机械臂末端接触安全的风险。
根据上述分析可知,为了保证空间双臂机器人稳定非合作目标过程中的末端接触安全,需要同时考虑无效运动旋量和目标惯性参数不确定性对接触力/力矩产生的影响,协调地控制双臂的运动,降低控制过程中产生的接触力与力矩。
3 安全协调稳定控制
为了同时处理无效运动旋量以及目标不确定性对机械臂末端与目标接触的影响,基于柔顺等式对规划的期望稳定运动轨迹进行调整,求解能够实现目标与双臂末端接触柔顺的安全稳定运动轨迹;通过在设计的控制性能约束范围内有效地跟踪安全稳定运动轨迹,保障控制的效率,协调地控制双臂运动实现接触的柔顺,使得空间双臂机器人能够安全地稳定非合作目标的运动。
3.1 目标运动轨迹规划
为了实现空间双臂机器人稳定非合作目标的运动,首先,利用目标惯性参数的估值规划稳定控制过程中目标的参考期望运动轨迹。利用贝塞尔曲线对目标的六自由度运动进行参数化处理,并设计稳定过程中目标的优化运动轨迹。
选取贝塞尔曲线:

式中:下标代表运动的第个自由度;4为贝塞尔曲线的阶数;为构造二项式系数的变量;P是构建贝塞尔曲线的控制点;是归一化时间。根据目标运动稳定时间,时间可定义为。考虑到空间非合作目标运动的不确定性、组合体操控的安全性和时效最优性,本文在参考期望轨迹规划的过程中采用了时间最优与接触力/力矩尽量小和安全的联合优化方式。根据式(3)中的目标动力学方程,可将稳定目标的运动规划问题转化为优化问题:
式中:和分别是最优时间和接触力与力矩的权重因子;和为目标运动约束的下界与上界;为接触力与力矩的安全约束。由于该优化问题同时考虑了最优稳定时间和接触力/力矩,不会规划过大的接触力/力矩,且可以通过调节权重因子控制最优稳定时间的长短,因此可以根据任务需求灵活地规划参考期望运动轨迹。
通过求解上述的优化问题,可以规划稳定过程中目标的参考期望运动轨迹。
3.2 安全稳定运动轨迹求解
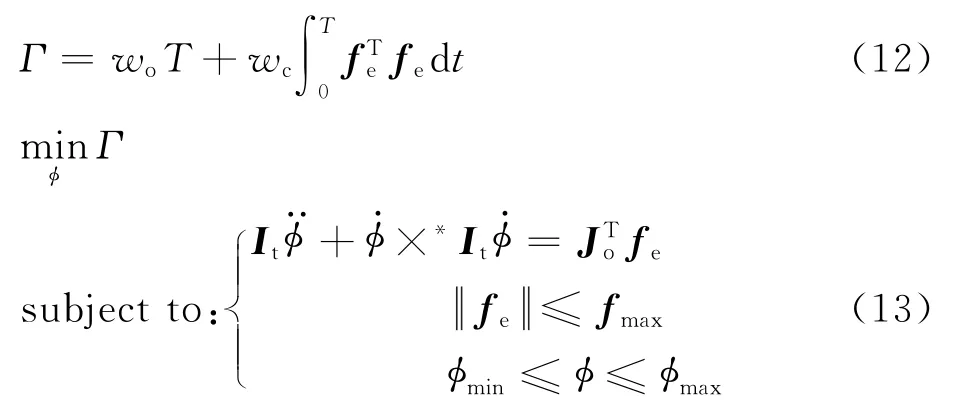
鉴于目标运动轨迹是利用目标惯性参数估值规划的,由3.1节的分析可知,直接跟踪对应的关节与基座运动轨迹具有一定的风险。提出一种根据接触力与力矩调整稳定运动轨迹的内外双环式结构,利用内环与外环分别针对无效运动旋量和目标不确定性对接触力/力矩的影响,对目标参考期望运动轨迹进行柔顺化调整。最终,求解得到安全稳定目标的空间机器人关节与基座期望运动轨迹。








综上,安全稳定目标的空间机器人关节与基座的期望运动轨迹生成框图如图2所示。经过式(14)和式(16)中柔顺等式的调整,最终得到的期望运动考虑了无效运动旋量和目标不确定性对接触力/力矩的影响。跟踪时,空间双臂机器人能够同时考虑无效运动旋量和目标不确定性对机械臂末端与目标接触产生的影响,在机械臂末端与目标交互过程中实现柔顺接触。
图2 安全稳定运动轨迹求解框图Fig.2 Schematic diagram of safe stabilization trajectory generation
3.3 约束跟踪控制器设计
为了保证空间机器人能够有效地跟踪安全稳定目标运动的期望运动,实现目标与双臂末端交互的柔顺,基于障碍李雅普诺夫函数设计了控制性能可约束的跟踪控制器。


式中:∈R为由正数组成的控制性能约束向量。为了使得机器人跟踪过程中满足设计的性能约束,根据动力学方程式(1),设计跟踪控制律:




其中,障碍李雅普诺夫函数为
对式(25)中的求导可得

障碍李雅普诺夫函数导数为

利用不等式:
将式(19)中的控制律代入李雅普诺夫函数的导数中,可以推得≤0。由此可以推导得到,在跟踪控制的过程中,0时刻和后续时刻的李雅普诺夫函数满足:
对不等式两边进行指数化处理,整理后可以推得,后续时刻的跟踪误差满足约束关系:
式中: 和 为误差收敛时的约束下界与上界。根据跟踪误差的定义以及式(23)和式(24)可知,该跟踪控制器能够满足式(18)中设计的控制性能。对式(30)求导可知,该约束跟踪控制器能够约束跟踪误差的收敛速率。利用此约束跟踪控制器,空间双臂机器人可以在控制性能约束范围内有效地跟踪安全稳定目标的期望运动轨迹,实现空间双臂机器人抓捕非合作目标后的接触柔顺。
综上,空间双臂机器人抓捕非合作目标后的安全协调稳定控制框图如图3所示。
图3 协调稳定控制结构图Fig.3 Schematic diagram of coordinated stabilization control
4 仿真校验
设计了利用所提方法稳定非合作目标的仿真算例。空间机器人的双臂安装位置对称,空间机器人的运动学与动力学参数如表1所示。目标惯性参数的估值为真实值的80%。
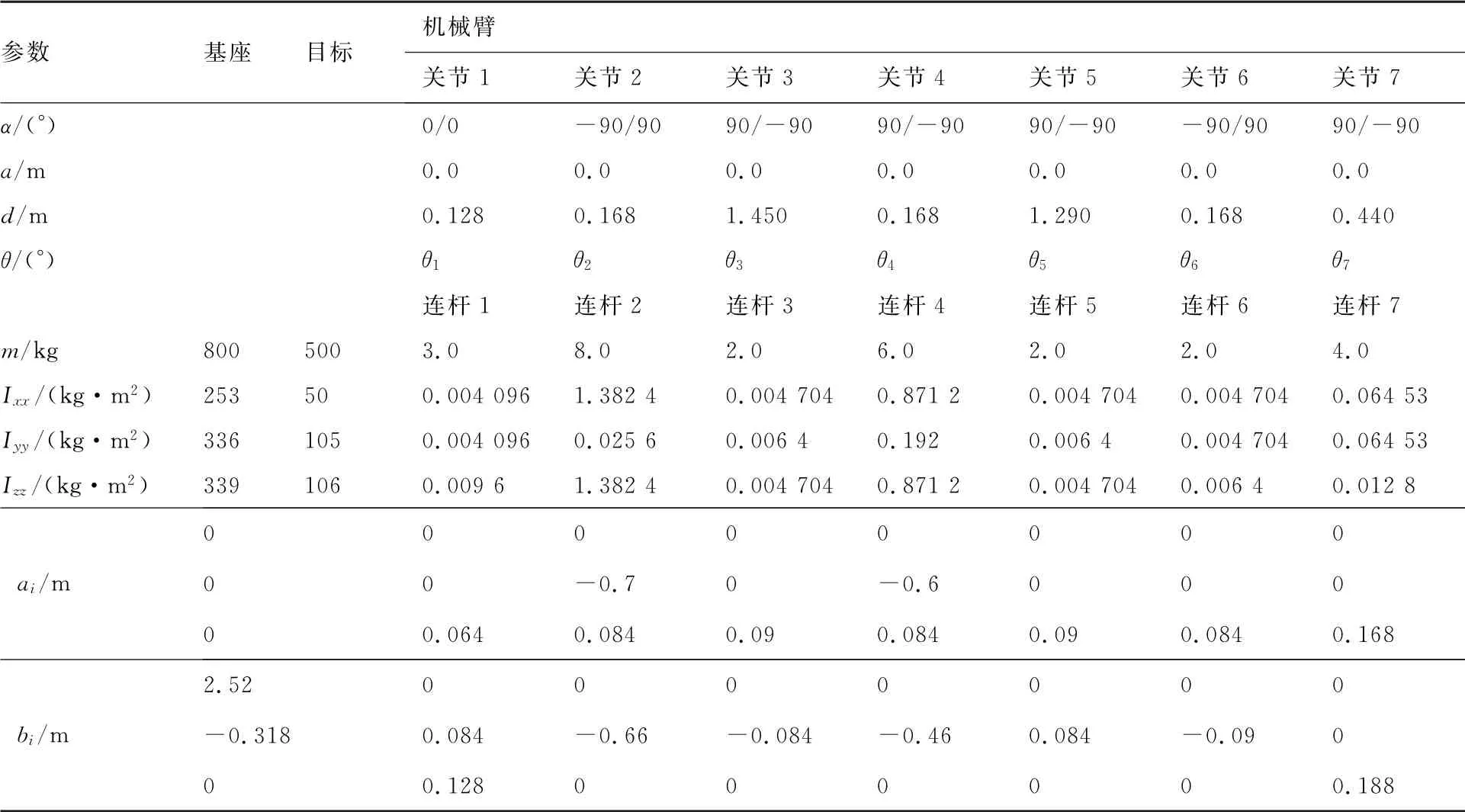
表1 空间机器人的运动学与动力学参数Table 1 Kinematics and dynamics parameters of space robot
非合作目标被抓捕后的相对速度为零,角速度为[-0.174 5 0 0]rad/s,目标上两个抓捕点的位置分别为[0 0.5 0]m 和[0 -0.5 0]m。设定目标运动轨迹的接触力/力矩约束上界分别为20 N 与20 N·m,约束下界为-20 N与-20 N·m,目标运动轨迹的时长为3 s。空间双臂机器人稳定非合作目标时,为了避免基座运动对机械臂末端与目标接触产生影响,令基座的位姿固定,期望运动速度为零。
根据式(4)中的运动学约束与目标运动轨迹,通过逆运动学计算可以得到未经内外双环结构调整的稳定运动轨迹。对于控制性能可设计的跟踪控制器,选择控制参数:

为了展示所提协调稳定控制方法的有效性,根据已有研究中的稳定控制方法设计了两个对照组。在对照组1中,稳定过程中不考虑空间机器人与目标交互的安全,利用PD 控制器直接跟踪未经调整的稳定运动轨迹。由空间双臂机器人的动力学方程,可以设计PD 控制器:


在对照组2中,稳定过程中采取已有研究中的阻抗控制方法,根据接触力与力矩对跟踪控制律进行调整实现接触柔顺。仿真中利用阻抗控制器跟踪未经调整的稳定运动轨迹:

式中:、和为对称的正定矩阵。仿真过程中,对照组2中实现阻抗控制的柔顺等式参数以及所提方法求解安全稳定运动轨迹所需的柔顺等式参数如表2所示。
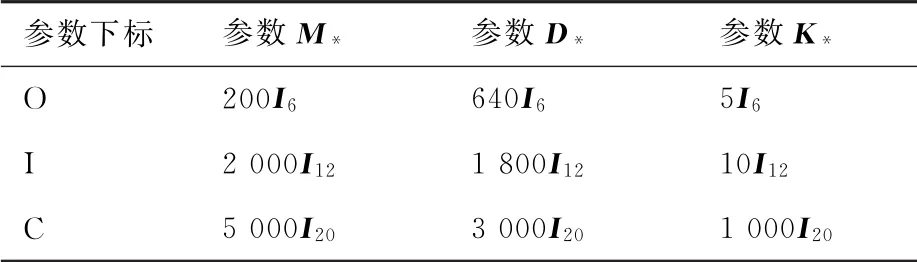
表2 柔顺等式参数Table 2 Parameters of compliant equations
图4~图6给出了所提方法与对照组方法在稳定目标过程时,空间双臂机器人末端的接触力/力 矩情况。图中、、和、、分别为和的 三 轴 分 量;、、和、、分别为和的三轴分量。由于抓捕点处目标的加速度与机械臂末端的加速度之间存在初始偏差,因此在抓捕后开始阶段,目标的运动会受到初始接触的冲击影响,抓捕点处会产生较大的初始接触力/力矩。
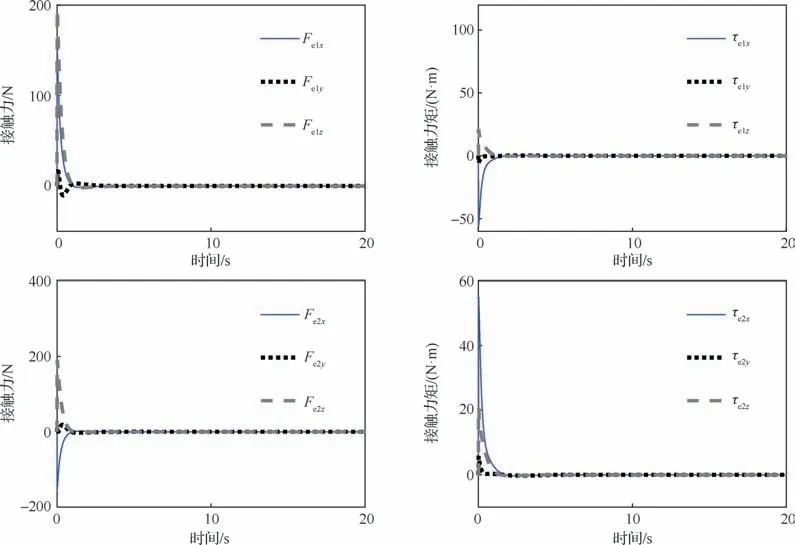
图4 协调稳定控制机械臂末端的接触力与力矩Fig.4 Contact wrenches of robot end-effector under coordinated stabilization control
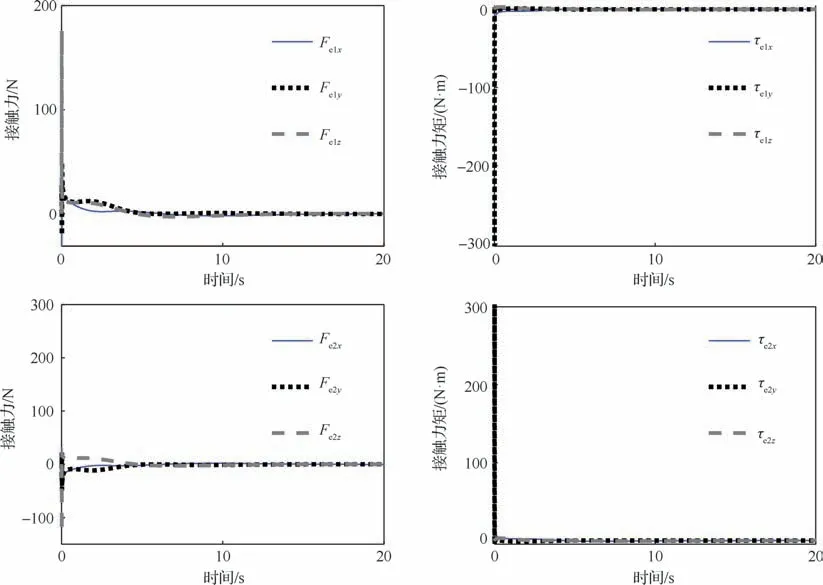
图6 阻抗控制机械臂末端的接触力与力矩Fig.6 Contact wrenches of robot end-effector under impedance control
对比图4与图5、图6可以发现,由于未考虑目标与机械臂末端交互的安全,PD 控制器跟踪未经调整的期望轨迹时产生了三组中最大的接触力/力矩,无法保证目标与机械臂末端的安全交互。相较于PD 控制,考虑了末端接触力/力矩的阻抗控制方法与协调控制方法有效地降低抓捕后阶段的接触力。而协调控制方法同时考虑了目标的不确定性与无效运动旋量对接触力/力矩的影响,故相较于仅考虑接触力/力矩大小的阻抗控制,协调控制进一步地降低了机械臂末端的接触力矩。鉴于协调控制需要根据接触力/力矩生成安全运动轨迹,受到安全运动轨迹的影响,协调控制稳定目标时产生的接触力/力矩收敛速度较PD控制慢;而与阻抗控制方法相比,接触力/力矩能够根据安全轨迹快速收敛,因而收敛速度较阻抗控制快。因此,所提方法通过协调双臂期望运动和约束跟踪控制性能,有效地控制了目标不确定性与无效运动旋量对接触力/力矩造成的影响,实现了双臂末端与目标接触的柔顺,降低了稳定过程中产生的接触力/力矩,保证了稳定过程中双臂末端与目标交互的安全。
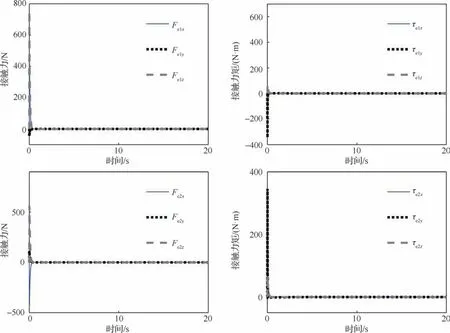
图5 PD 控制机械臂末端的接触力与力矩Fig.5 Contact wrenches of robot end-effector under PD control
图7~图9给出了利用所提协调控制方法稳定目标和使用对照方法跟踪轨迹稳定目标时的跟踪误差。由仿真结果可知,所提协调控制与PD控制均可以快速地跟踪上期望运动轨迹。从图7的仿真结果可以看出,约束跟踪控制器能够在设计的跟踪误差约束范围内有效地跟踪安全稳定运动轨迹。对比图7和图8可知,由于安全稳定运动轨迹受到接触力/力矩的影响,协调控制的跟踪误差收敛速率低于PD 控制。此外,由于阻抗控制的控制性能受到接触力/力矩的影响,阻抗控制的跟踪误差收敛速率为三组中最低。相较于阻抗控制,本文所提协调控制方法的跟踪控制性能不受接触力/力矩影响且可以设计,能够有效地跟踪安全稳定轨迹,保障稳定控制的效率。

图7 协调稳定控制关节运动跟踪误差Fig.7 Tracking errors of joints under coordinated stabilization control
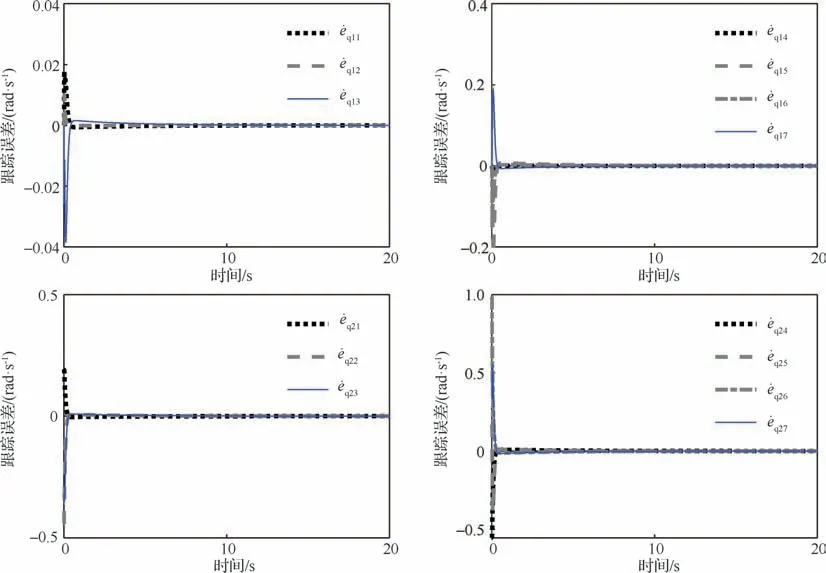
图8 PD 控制关节运动跟踪误差Fig.8 Tracking errors of joints under PD control
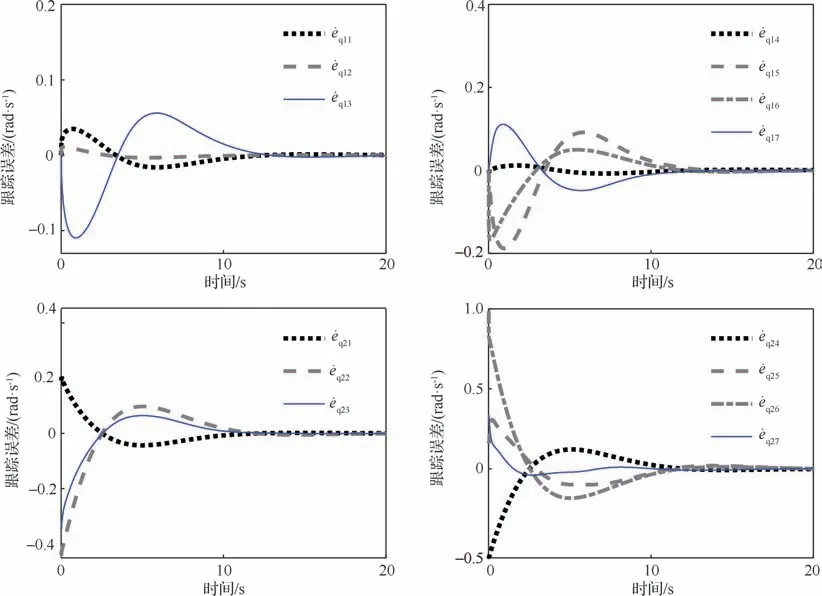
图9 阻抗控制关节运动跟踪误差Fig.9 Tracking errors of joints under impedance control
图10~图12给出了所提协调控制方法与两种对照方法稳定目标运动时目标的运动状态。由于初始时刻的冲击影响,目标在初始时刻产生了速度。图中 、 和 为的三轴分量; 、 和 为的三轴分量。从仿真结果可知,三种方法均可以有效地稳定目标运动。由于PD 控制未考虑接触力/力矩的影响,目标运动参照未经调整的参考期望运动轨迹,因而PD 控制的稳定速度最快。相较于PD 控制,由于协调控制的安全稳定运动轨迹受到接触力/力矩的影响,因而稳定速率低于PD 控制。而阻抗控制的控制性能受到接触力/力矩影响,当控制律中的接触力与力矩收敛时跟踪误差才能保证收敛,因此阻抗控制稳定目标运动的速率为三组中最低。
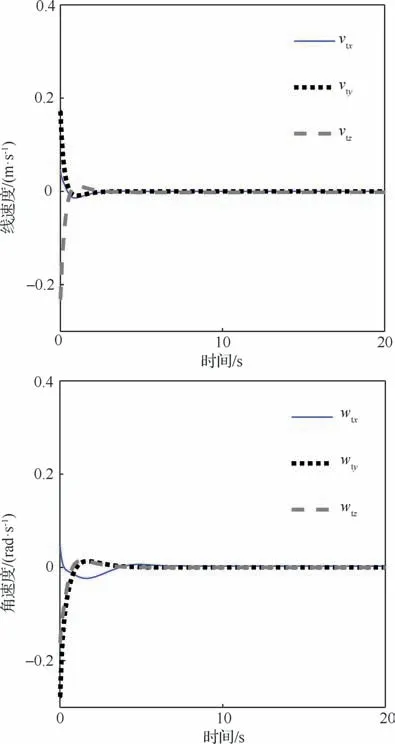
图10 协调稳定控制目标运动速度Fig.10 Velocities of target under coordinated stabilization control
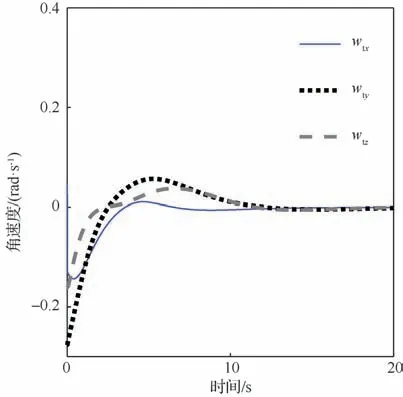
图12 阻抗控制目标运动速度Fig.12 Velocities of target under impedance control
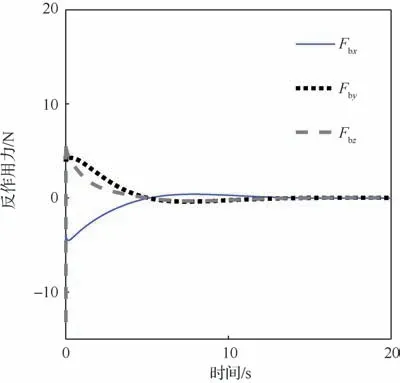
图13~图15给出了稳定控制过程中,机械臂由于耦合作用对基座产生的反作用力/力矩。图中 、 和 为的三轴分量; 、 和 为的三轴分量。由仿真结果可知,PD控制产生的反作用力/力矩最大;而阻抗控制与所提协调控制均有效地降低了稳定过程中因耦合作用对基座产生的反作用力/力矩,保证了基座安全。由于阻抗控制根据接触力/力矩调整了基座和机械臂关节的跟踪控制律,相比协调控制方法基座受到的最大反作用力/力矩小,但跟踪期望运动的时间较长。而协调控制稳定目标运动时,约束跟踪控制器为了保障跟踪控制性能基座受到的最大反作用力/力矩大于阻抗控制,但仍在安全范围内,且稳定控制的速率和反作用力/力矩的收敛速率比阻抗控制高,这说明本方法在保证安全的前提下协调控制效率更高。

图11 PD 控制目标运动速度Fig.11 Velocities of target under PD control
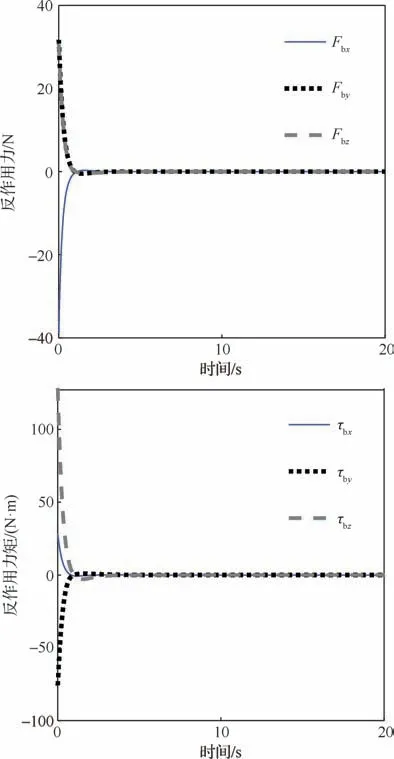
图13 协调稳定控制对基座的反作用力与力矩Fig.13 Coupling wrenches for base under coordinated stabilization control

图15 阻抗控制对基座的反作用力与力矩Fig.15 Coupling wrenches for base under impedance control

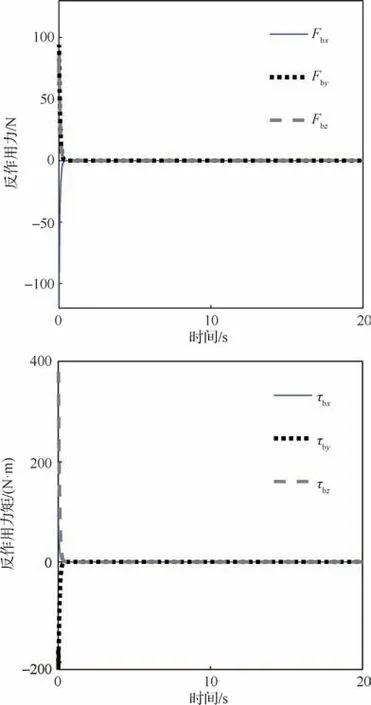
图14 PD 控制对基座的反作用力与力矩Fig.14 Coupling wrenches for base under PD control
为了方便对照,表3对3种方法稳定目标的时间、稳定目标过程中的最大接触力/力矩、接触力/力矩收敛时间、对基座产生的反作用力/力矩及其收敛时间等进行了汇总和对比。相较于未考虑交互安全的PD 控制,所提协调控制方法实现稳定控制过程中的最大接触力降低了74.2%,最大接触力矩降低了84.1%,基座受到的最大反作用力与力矩分别降低了66.7%和66.4%。由于接触力/力矩对安全稳定运动轨迹的影响,协调控制的稳定时间相较PD 控制增加了21.6%,接触力/力矩收敛至数量级10内的时间增加了9.1%。此外,由于PD 控制并未根据接触力/力矩协调双臂的运动,相较于协调控制,反作用力/力矩收敛至数量级10内的时间短。与考虑了交互安全的阻抗控制相对比,由于本文方法同时考虑了目标不确定性和无效运动旋量对接触力/力矩的影响,虽然最大接触力提高了10.9%,但是最大接触力矩相较阻抗控制降低了81.2%,仍然保证了交互的安全。此外,由于所提方法的跟踪控制性能不受接触力/力矩影响,相较于阻抗控制方法,接触力/力矩收敛至数量级10内的时间减少了68.2%,反作用力/力矩收敛至数量级10内的时间降低了69.6%,稳定目标运动的时间缩短了56.3%,所提方法在稳定目标的过程中更高效地实现了双臂末端与非合作目标的安全交互。

表3 3种控制方法的性能结果对比Table 3 List of simulation results of three control methods
综上,相较于无法保证目标与机械臂末端交互安全的PD 控制,本文所提协调控制能够在实现交互安全的同时保障跟踪控制性能,便于设计且安全性更高。与阻抗控制相比,协调控制进一步地降低了机械臂末端的接触力矩;跟踪控制性能可设计且不受接触力与力矩的影响,减弱了接触力/力矩对稳定速率的影响。所提方法通过协调双臂运动实现了双臂末端与目标交互柔顺的稳定控制,降低了稳定过程中产生的接触力与力矩,保证了稳定控制过程中目标与机械臂末端交互的安全,提高了柔顺交互时稳定控制的效率。
5 结 论
1)所提方法通过跟踪由内外双环求解的安全稳定运动轨迹,协调地控制了双臂的运动,使得双臂末端与目标交互柔顺,降低了稳定过程中产生的接触力/力矩,实现了机械臂末端与目标交互柔顺的安全稳定控制。
2)与已有的阻抗控制方法相比,所提方法同时考虑了双臂末端对目标拉扯/挤压以及目标不确定性对接触力/力矩的影响,进一步地降低了机械臂末端的接触力矩;跟踪控制性能可设计,减弱了接触力/力矩对稳定速率的影响,提高了双臂末端与目标柔顺交互时稳定控制的效率。
