受油机指定时间姿态稳定控制
2022-03-29吴慈航闫建国钱先云郭一鸣屈耀红
吴慈航,闫建国,*,钱先云,郭一鸣,屈耀红
1.西北工业大学 自动化学院,西安 710072
2.航空工业第一飞机设计研究院,西安 710089
在军事需求的不断牵引下,具有重要战略意义的空中加油技术受到广泛关注。在该技术的支持下,受油机的航程和滞空时间可获得较大提升,载弹量也可相应提高,实现飞行性能的增强。输油阶段是空中加油任务中的一个子过程,此时受油插头与加油锥套相啮合。输油阶段加受油机保持相对稳定的要求对受油机飞行控制系统提出了重要挑战,如若控制效果不佳,加油锥套将可能从受油插头脱离,导致加油任务失败。此外,脱离的加油锥套可能与受油机头部在空中相撞,严重威胁受油机的飞行安全。因此,拥有快速姿态稳定能力对受油机受扰后快速恢复至平衡状态,进而辅助输油任务的顺利完成具有重要意义。然而,输油阶段持续注入受油机的燃油将引起时变转动惯量,直接影响受油机姿态动力学。此外,在加受油机近距耦合时,受油机还处于紊流风和加油机尾流的流场下,这些难题对设计具有期望收敛速度的受油机姿态稳定控制器提出了技术挑战。
近些年来,国内外研究者针对空中加油受油机控制问题,展开了一系列研究,并取得一定效果。基于受油机小扰动线性化模型,研究者相继使用粒子群优化比例-积分-微分(Proportional-Integral-Derivative,PID)控制器、线性二次型(Linear Quadratic Regulator,LQR)控制器、L控制器实现受油机控制。然而,这些线性控制器对干扰的适应能力不足,难以保证受扰时的控制效果。为了提高干扰抑制能力,北京航空航天大学王宏伦建立了反步高阶滑模抗扰动控制器,提高了控制器的抗干扰能力和控制滞后。段海滨结合自抗扰控制(Active Disturbance Rejection Control,ADRC)鲁棒性强和鸽群优化算法参数寻优能力强的优势,设计自抗扰姿态控制器。然而,这些研究主要聚焦于受油机对接段的控制,使用的是定常质量非线性模型,并未考虑强时变转动惯量和质量的影响。为了解决这个问题,Dogan等考虑了传输燃油对受油机动力学影响,建立了时变质量/转动惯量下的受油机模型。空军工程大学董新民教授在此基础上建立了受油机LQR 控制器和指令滤波反步控制器,解决时变动态下的受油机控制。
值得注意的是,将以上控制器代入受油机闭环控制系统时,系统的收敛特性往往为渐近收敛,理论上需要无限长的调节时间,不利于受油机受扰后尽快稳定姿态,影响输油任务的执行。与渐近稳定相比,有限时间控制可以提供更快的收敛速度,并在飞行器控制中得到应用。然而,有限时间控制系统的收敛时间与系统初值显性相关,当初值变化时收敛时间难以固定。固定时间控制可以在收敛时间有界的基础上,进一步确保在任意初始条件下该时间为一固定常值,为控制系统带来一些确定性。固定时间控制系统中的收敛时间通常是系统参数的复杂函数,设计者难以直接构建收敛时间和参数间的直接关联。当系统设计者需要根据实际工况和任务约束调整期望的收敛时间时(如根据飞行条件和受油管-锥套的允许相对偏差调整受油机姿态稳定系统的收敛时间),复杂的函数关系和多调参变量部分限制了该法在实际系统中应用。指定时间稳定(predefined-time stability)是一种特殊形式的固定时间稳定,在系统收敛时间上具有更严格的约束。其要求系统的收敛时间不仅是与系统初值无关的定值,而且可通过控制器参数自由预设。作为一种较新的控制策略,指定时间控制在机械臂、航天器姿态系统中得到应用,但鲜有在飞行器领域的报道。
基于以上描述,本文提出了一种受油机指定时间姿态稳定鲁棒控制器,在时变转动惯量、不确定转动惯量和风扰动情况下,仍然保证系统状态在指定时间内收敛,从而提升受油机快速姿态稳定能力。首先,给出指定时间稳定有关的定义和定理。随后,建立含时变动态和扰动的受油机姿态运动模型,并设计指定时间控制器。最后,通过数字仿真对其控制效果和优越性进行分析。
1 受油机姿态运动模型
空中加油任务通常在高度不太高,速度不太快的条件下执行,因此可采用平板地球假设,使用矢量形式刚体飞行器转动模型

式中:=[,,]∈R为受油机欧拉角,为滚转 角,为 俯 仰 角,为 偏 航 角;=[,,]∈R为受油机相对惯性系的角速度在机体系三轴的分量,分别为滚转角速度、俯仰角速度和偏航角速度;∈R为反对称矩阵;∈R为受油机惯性矩阵;∈R和∈R分别为受油机姿态控制力矩和干扰力矩;()∈R为转换矩阵,可表示为

通常,受加工精度和建模水平的限制,受油机的精确转动惯量难以获取。同时,输油阶段不断进入受油机的燃油也将改变转动惯量特性。此处,令∈R、∈R和∈R分别表示标称惯性矩阵、不确定惯性矩阵和时变惯性矩阵,于是有

此外,输油阶段的外部扰动力矩主要来源于2部分。其一是由加油机下洗气流和紊流风综合风场引起的风扰动∈R,其二是由质心移动产生的附加力矩∈R,有

式中:∈R为受油机质心和压心的位置差;∈R为作用在压心处的气动力矩。




由于空中加油任务通常在晴好天气下执行,且在输油阶段受油机的运动将保持在一定范围内,不会出现极端运动状态。同时,输油速率被预先给定,在燃油系统的分配作用下受油机质量特性将会平缓变化。基于此,可作如下假设。

在空中加油过程中,假设1通常是合理,文献[19-20]等也使用了类似假设。同时,虽然对飞行器六自由度运动而言,飞行控制系统为欠驱动系统。但是对姿态系统而言,飞行控制系统是全驱动的。因此,为了控制律设计的便利,此处采用与文献[18]类似的方法,以转换姿态控制力矩作为系统控制输入,而非实际舵偏。控制力矩和舵偏的直接转换关系可由文献[8]获得。
2 指定时间姿态稳定控制器设计
本节首先介绍了指定时间稳定理论有关的定义和定理,随后进行指定时间姿态稳定鲁棒控制器的设计。
2.1 指定时间稳定
考虑如下非线性自治系统

式中:∈R 为状态向量;:R →R 为平衡点在原点的非线性映射函数,系统初始条件为(0)∈R 。
如果存在一个预设常数>0,对于∀∈R 及∀>,都可使系统(7)的解满足(,)0,那么则称系统(7)是指定时间稳定的,此时为指定时间。
对于定义在∈[,∞)上动态系统(7),其中∈R∪{0},若存在一个径向无界的李雅普诺夫函数(),对任意初值均满足:

式中:>0,∈(0,1),>0和>0为系统参数。于是,动态系统(7)是指定时间稳定的,且收敛时间为。
对式(10)分离变量,得到

从0处积分,系统调节时间函数()为

由于()是一个径向无界函数,于是有

证毕。
虽然系统(8)与现有文献中的指定时间稳定系统类似,但仍有以下不同之处:
1)本文提出的指定时间稳定系统拥有额外的控制参数和,在控制器设计时拥有更大的自由度。
2)文献[15]中的指定时间稳定系统可视为系统(8)中的1的特例。
2.2 指定时间姿态稳定控制器设计
1)跟踪微分器
为了得到被跟踪信号的数值微分,可使用离散二阶系统形式的跟踪微分器(Tracking Differentiator,TD),如式(12)所示:

式中:状态量()为被追踪信号()的数值微分值;为采样时间;最速控制信号可表示为

式中:为系统可调参数;函数(·)计算式为
2)指定时间姿态控制器
本节针对被控对象模型(5),考虑时变转动惯量、不确定转动惯量、风干扰和附加力矩的影响,设计指定时间姿态控制器。定义姿态稳定误差为

式中:为期望稳定的姿态。定义滑模面为

其中:

式中:,1 ∈R;1 ∈(0,1)为系统参数;>0为预设时间;为有关姿态误差的李雅普诺夫函数,有

基于定理1,设计姿态稳定控制器如(19)所示:



对于受油机姿态系统(5),在指定时间姿态稳定控制器(19)的作用下,通过设置系统参数=+,姿态稳定系统可实现指定时间稳定,姿态跟踪误差可在指定时间内收敛到平衡点的邻域内。
定理2的证明分为2个步骤。
1)在控制律的作用下,如果滑模面达到稳定点,即=0时,可以得到

对李雅普诺夫函数求导,并代入式(21),可得


根据定理1,姿态稳定误差将在指定时间内稳定至0。
2)对李雅普诺夫函数求导,可以得到

将控制律(19)代入式(23),可以得到



式中:与TD 采样周期和参数有关。
因为为有界量,根据定理1及微分不等式的性质,式(25)可确保滑模面将在指定时间内收敛至包含0的邻域内,且收敛精度与TD 的追踪精度有关。
结合第1)步和第2)步的证明,受油机姿态稳定系统有界稳定,姿态稳定误差将在指定时间=+内收敛至包含0的邻域。
证毕。
虽然现有文献[17]实现了航天器指定时间姿态追踪,但其控制器设计严格依赖于精确的微分信号。但在实际工程应用中,精准的数值微分往往难以获取。本文提出的控制器使用TD 获取数值微分信号,并将追踪误差纳入李雅普诺夫稳定性证明中,较现有文献具有更强的应用可能性。
为了减缓抖振现象,在仿真时使用tanh()函数替代控制律中的符号函数。根据文献[23],不等式|sD |-sD tanh(Ks)≤0278 5D/成立。替换符号函数引入的近似误差可直接叠加到式(25)的上,定理2的结论仍然成立。
3 仿真及分析
本节通过数字仿真验证受油机指定时间姿态稳定控制器的控制效果,同时将其与有限时间姿态控制器对比。
在仿真过程中,设受油机的标称转动量为



表1 控制器参数Table 1 Parameters of control system
将控制器代入受油机闭环姿态控制系统后,受油机的姿态曲线、角速度曲线、姿态误差曲线和控制力矩曲线分别如图1~图4所示。由图1 可知,在预设的稳定时间=3 s+1 s=4 s内,系统姿态已经稳定。同时,姿态稳定系统的过渡过程平缓,没有超调,动态性能良好。此外,受油机角速度经过短暂的初始峰值后,也可在指定时间内收敛至稳定状态。在图3 所示的控制精度下(约为10度的量级),图4 中展示的姿态稳定系统控制力矩较为平缓,没有出现抖振现象,可通过作动器伺服。同时,控制精度符合工程要求,方法具有一定可行性。

图1 受油机姿态响应曲线Fig.1 Time response of attitude of receiver

图2 受油机角速度响应曲线Fig.2 Time response of angular velocity of receiver

图3 受油机姿态误差曲线Fig.3 Time response of attitude error of receiver
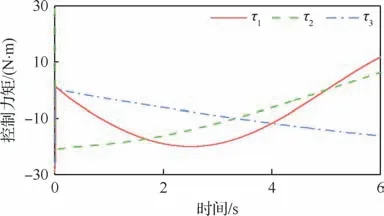
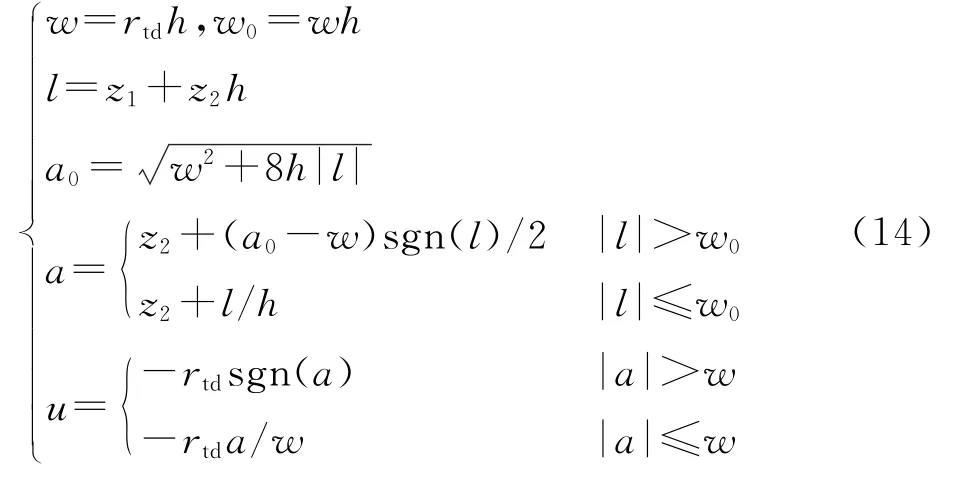
图4 控制力矩曲线Fig.4 Time response of control torque
为了进一步说明本文提出的控制器关于收敛时间特性的优势,在表1控制器参数的基础上,进一步缩短预设的指定时间为=0.8 s、=0.2 s,仿真结果如图5 所示。由仿真结果可知,在控制器其他参数固定的情况下,通过简单调整控制器(19)中参数和,即可实现受油机姿态在指定时间下的控制。而在常规固定时间控制系统中,需要同时调整控制器增益和幂指数,并使其满足复杂的非线性关系才可实现收敛时间调整的目的,较本文使用的控制器而言更为复杂。在实际空中加油过程中,受油机往往会受到来自加油机尾流、大气紊流和阵风等的多重干扰下,受油机姿态会出现一定程度波动。若通过指定时间姿态稳定控制器,给受油机以确定的姿态收敛时间,对促进输油阶段的任务完成具有重要意义。

图5 不同指定时间下受油机姿态相响应对比Fig.5 Comparison of time responses of receiver attitude with different predefined-time
此外,指定时间控制器是针对有限时间控制器的改进,此处对二者进行控制效果的对比。在仿真过程中,使用文献[25]的有限时间姿态控制器作为参考源,为了突出控制器的效果,弱化干扰对标称控制性能的影响,在对比性仿真中设干扰的幅值为0.01 N·m,相关参数如表2所示。
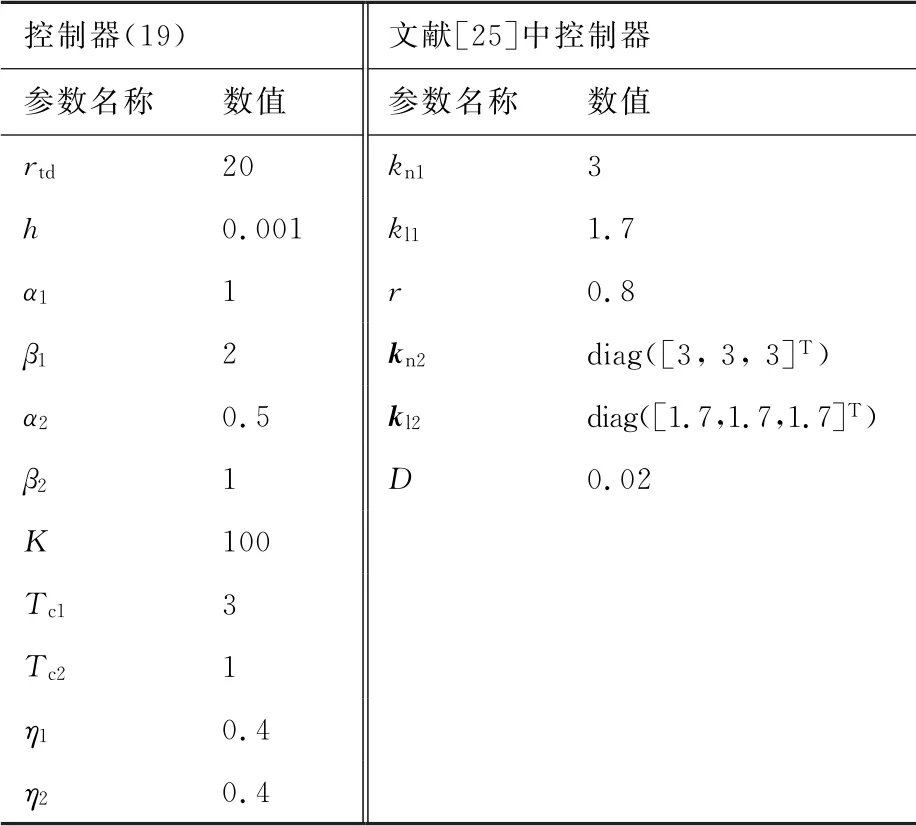
表2 对比试验中控制器参数Table 2 Parameters of control system
图6和图7分别展示了指定时间姿态稳定控制器和有限时间姿态稳定控制器的姿态稳定曲线及其控制力矩。定义控制系统的收敛时间为姿态角误差进入0.05°包络线的时刻,及最大控制输入为控制幅值绝对值的最大值。由表3可知,所提出的指定时间姿态稳定控制器不仅较有限时间控制器有更快的收敛速度和更优异的收敛性能,同时,二者所需的最大控制力矩相当,无需消耗更多的控制能量。

图7 指定时间/有限时间控制器的控制输入对比Fig.7 Comparison of control torque with predefinedtime and finite-time controller

表3 控制器性能指标对比(最大输入力矩相当时)Table 3 Comparison of controller performance indexes with equivalent input torques

图6 指定时间/有限时间控制器的姿态响应对比Fig.6 Comparison of time responses of receiver attitude with predefined-time and finite-time controller
为进一步验证控制器性能,保持指定时间控制器的参数不变,调节有限时间控制器参数,控制器性能对比如图8 所示。仿真结果表明,当有限时间控制器和指定时间控制器具有相当的收敛时间时,较指定时间控制器而言,有限时间控制器需要相对更大的输入力矩(收敛时间和最大输入力矩的定量指标见表4)。这些额外的输入力矩在初始收敛阶段造成一定超调,并未被有效地利用。综合图6~图8,所提指定时间控制器相较于有限时间控制器,在最大控制力矩幅值相当时拥有相对更快的收敛时间,在收敛时间相当时拥有相对更小的输入力矩,具有较为优异的控制性能。
图8 指定时间/有限时间控制器性能对比Fig.8 Comparison of control performances with predefined-time and finite-time controller

表4 控制器性能指标对比(姿态稳定时间相当时)Table 4 Comparison of controller performance indexes with equivalent settlling time
4 结 论
1)本文设计了一种基于指定时间稳定性的受油机指定时间姿态稳定鲁棒控制器。受油机的时变转动惯量、不确定转动惯量、风扰动、附加力矩等因素在控制器中予以考虑,仿真结果证明本文提出的控制器具有较好控制精度和动态过程。
2)与有限时间和固定时间控制策略相比,本文提出的指定时间控制器是一种更先进的策略。通过直接调整控制器参数,可使受油机姿态在预设时间内稳定,建立了收敛时间和控制器参数间的简单对应关系。该方法还可扩展至其他对时间敏感的飞行任务中,促进飞行任务的完成。
后期,将继续考虑执行机构输入受限和控制算法在含实时操作系统的嵌入式平台的移植,以及实际输油过程中的外部扰动建模,以进一步提升该方法的工程应用性。
