基于改进YOLOv3的路面正负障碍物检测研究
2022-03-29顾士洲严天一
顾士洲 严天一










文章编号:10069798(2022)02004106;DOI:10.13306/j.10069798.2022.02.007
摘要:针对减速带和凹坑等路面正负障碍物目标检测问题,本文基于YOLOv3算法基本原理,在原YOLOv3算法的基础上,采用扩增检测尺度的方法得到改进的YOLOv3算法。利用减速带和凹坑等路面正负障碍物训练集进行模型训练,通过测试集完成对训练模型的测试。测试结果表明,改进后的YOLOv3算法在路面正负障碍物的检测能力上有所提高,RRe值提高了0.8%,RMAP值提高了0.2%,验证了本文对原YOLOv3改进的有效性。该研究可用于智能车辆对减速带和凹坑等路面正负障碍物的检测,具有一定的实际应用价值。
关键词:改进YOLOv3;路面正负障碍物;检测尺度;模型训练;模型测试
中图分类号:TP391.4;TP393.021文献标识码:A
近年来,智能汽车行业发展迅速,消费者对车辆乘坐舒适性提出了更高要求,利用目标检测技术超视距检测行驶方向上的路面正负障碍物,智能化调节车辆悬架的刚度或阻尼,有效提高了车辆乘坐舒适性。因此,目标检测技术在路面正负障碍物检测上的应用广泛。目前,国内外研究人员在目标检测领域开展了大量研究。R.HADSELL等人[1]提出了由近及远的自监督学习算法,检测可行驶区域及障碍物;R.GONZALO等人[2]针对无人机目标检测时因其连续姿态变化不受限和低频振动而不易检测的问题,提出了通过估计摄像机在两个后续视频帧之间的运动,创建人工光流场,并与真實光流场进行对比,实现在时间与空间维度上对动态移动目标进行有效跟踪;JINGL等人[3]采用随机Hough变换对路障物进行检测,相对于传统Hough变换,提高了检测效率;XUY等人[4]提出了一种基于最大稳定极值区域法的快速图像区域匹配方法,测试结果表明,该方法具有较高的精度;LINY等人[5]提出了基于UV-disparity的路面估算算法,该算法可有效估计各种道路条件下的障碍物位置信息;王健[6]采用一种数字图像处理算法对路面破损图片预处理,选择Canny模板作为边缘检测模板,可准确定位图像边缘;叶家玮等人[7]利用BorlandC++Builder6.0开发了一种具有路面雷达数据转换和路面结构缺陷识别等功能的软件系统,与原路面雷达配套软件IRIS-L相比,提高了路面质量检测的准确性和结构缺陷的识别率;王荣本等人[8]通过SUSAN算子分割图像,利用边界跟踪算法进行滤波,最后利用投影法确定出原始图像中的石块位置;俞俊威等人[9]采用深度学习方法设计了一种新的基于全局特征的道路消失点检测模型,试验结果表明,增加消失点导向有利于微小障碍物的检测;张兴旺等人[10]提出结合Tiny-YOLOv3和目标跟踪算法的思想,使得无人机对地面目标的检测速度明显提高;叶佳林等人[11]通过对特征提取网络和定位损失函数进行改进,使得非机动车类目标的漏检率有所降低;景亮等人[12]提出了一种双目摄相机融合改进YOLOv3算法的行人障碍物检测和定位方法,测试结果表明,准确率和召回率均高于原模型;范丽等人[13]基于YOLOv3目标检测算法融入标签平滑,采用多检测尺度的方法增强了其鲁棒性和泛化能力;袁红斌等人[14]制定了Retinex算法来增强低照度图像,将车载相机和激光雷达数据进行融合,验证了传感器数据融合后对障碍物检测更有效、及时;郁梅等人[15]基于快递路面重建算法提出了一种车道与障碍物检测方法,该方法可自适应修正摄像机参数,在斜坡路面工况下也能有效获得车道和障碍物检测结果;李盛辉等人[16]提出了一种基于全景视觉的动态障碍物目标检测算法,与传统的单目和双目视觉相比,全景视觉具有360°无盲区检测的优点。但以上对路面正负障碍物检测方面的研究相对较少。因此,本文基于原YOLOv3目标检测算法,针对小目标漏检问题,采用扩增检测尺度的方法对其进行了改进,通过利用自主制作的减速带和凹坑等路面正负障碍物数据集,完成了模型训练和测试。测试结果表明,RRe值和RMAP值均有所提高,验证了本文对原YOLOv3改进的有效性,该研究可用于智能车辆对减速带和凹坑等路面正负障碍物的检测。
1YOLOv3原理
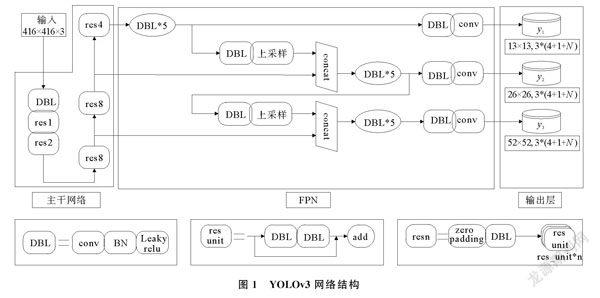
经YOLOv1和YOLOv2算法的应用经验积累,YOLOv3将主干网络改成了Darknet53,目标检测尺度数改为3个,先验框数进行调整,这些改进使YOLOv3的检测精度和检测速度大幅度提升。YOLOv3网络结构包括主干网络、特征金字塔网络(featurepyramidnetworks,FPN)[17]以及输出层,YOLOv3网络结构如图1所示。
YOLOv3进行图像目标检测时,将输入图片的大小缩放成为416×416,若数据集中存在N个类别的目标物体,经过YOLOv3网络后,得到3个属性分别为(13×13,3*(4+1+N)),(26×26,3*(4+1+N)),(52×52,3*(4+1+N))的特征图。其中,13×13,26×26,52×52为图像划分的网格,3表示每个网格将预测3个边界框;4表示边界框的中心点坐标、高度、宽度;1表示目标检测可信度。一个单独的网格拥有3个先验框,当检测到内部存在目标物体时,对其进行类别检测及边框预测。经过所有网格的预测后,获取所有预测框的类别信息和位置信息,最终通过非极大值处理后得到目标边界框,实现对目标的准确检测。
2YOLOv3改进
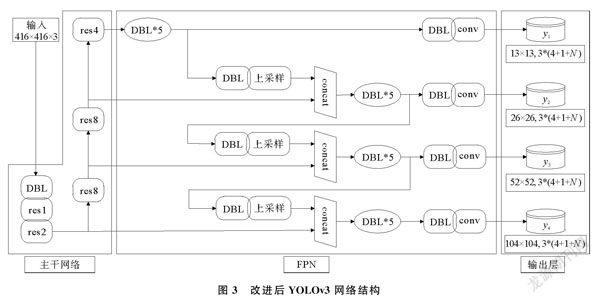
原YOLOv3算法具有3个检测尺度,相应地输出3组特征图,分别为8倍下采样特征图、16倍下采样特征图、32倍下采样特征图。对于一些小目标检测物,或者在复杂环境下进行检测,原YOLOv3算法准确率会降低,甚至出现漏检的情况。针对此问题,本文采用扩增检测尺度的方法,将原YOLOv3算法的检测尺度数量由3个扩增到4个,相应地输出4组特征图,分别为4倍下采样特征图、8倍下采样特征图、16倍下采样特征图和32倍下采样特征图,完成YOLOv3算法的改进。YOLOv3网络结构中FPN层结构改进前后对比如图2所示。-
改进后的YOLOv3进行特征融合的过程是将深层32倍下采样特征图经过2倍上采样,使其尺度与16倍下采样特征图一致,再与16倍下采样特征图进行拼接融合,同理,与8倍下采样特征图和4倍下采样特征图进行拼接融合,得到特征尺度大小分别为13×13,26×26,52×52,104×104的特征图,从而增强了YOLOv3网络浅层特征的位置信息以及深层特征的语义信息。改进后的YOLOv3网络,加强了定位精度,提高了对小目标检测的准确性。改进后YOLOv3网络结构如图3所示。
3实验研究
3.1数据采集与标注
本文采集700余张减速带和凹坑等路面正负障碍物的数据图片,剔除不合要求部分,在剩余的600余张图片中随机选取120张用作测试集。通过横向和纵向翻转、顺时针和逆时针旋转等操作对剩余500余张图片进行数据增强处理,最终从处理后得到的图片中选取1800张用作训练集,利用标注工具进行路面正负障碍物目标标注。
3.2先验框选取
YOLOv3在输出特征图的每个网格进行目标边界框预测时,需要用到先验框,而合适的先验框值可使定位更加准确,因此,先验框值对于YOLOv3非常重要,可通过训练数据集聚类得到。原YOLOv3算法网络模型输出3组特征图,每组特征图分配有通过K-means算法[18]聚类得到的3组不同尺度的先验框,实现坐标回归,而本研究改进后输出4组特征图,需要为其分配不同尺度的先验框12组。
本文基于训练数据集数据,通过K-means算法进行聚类分析,针对4种输出特征图的特征尺度,给不同尺度的特征图分配合适的先验框尺寸,以提高路面正负障碍物的检测精度。4种输出特征图的先验框尺寸如表1所示。-
3.3实验环境
为测试模型的目标检测性能,本实验利用含256个CUDA-cores的NVIDIAPascalGPU进行模型训练。选用ARM64架构的NvidiaJetsonTX2平台作为测试环境,操作系统为LinuxUbuntu16.04,8GBLPDDR4内存,32GBeMMC5.1Flash内存,Opencv库实现测试结果可视化。
3.4评价指标
为了对训练模型的目标检测性能进行评估,本文采用RRe值和平均准确率(Meanaverageprecision,MAP)RMAP值作为评价指标,其计算公式为
式中,RRe、RP、RAP和RMAP分别为召回率、准确率、平均准确率和多类别平均准确率;n为检测目标类别数量;TP、FN和FP分别为真正样本、假负样本、假正样本的数量[19]。-
3.5模型训练测试
数据集进行理想化处理后得到训练集和测试集,训练集经网络模型训练后,通过计算损失函数值得到最优模型,利用训练模型完成对测试集的测试,模型训练测试流程如图4所示。模型训练时的学习率初始化为0.001,每迭代1000次,学习率减小1/5,每批样本数设为20,最大迭代次数设为3000。模型训练损失值随迭代次数变化曲线如图5所示。由图5可以看出,损失值在2800次到3000次迭代区间内趋于稳定。-
3.6结果分析
为比较原YOLOv3算法和改进YOLOv3算法的检测效果,利用二者训练后模型,分别在测试集上进行检测实验,原YOLOv3检测结果如图6所示,改进的YOLOv3检测结果如图7所示。其中,图6ab和图7ab是对路面正障碍物减速带检测效果;图6cd和图7cd是对路面负障碍物凹坑检测效果。
由图6和图7可知,原YOLOv3算法和改进后的YOLOv3算法均可有效检测减速带和凹坑等路面正负障碍物类别信息及位置信息,但改进后YOLOv3算法,检测性能提升很难从圖中观察。--
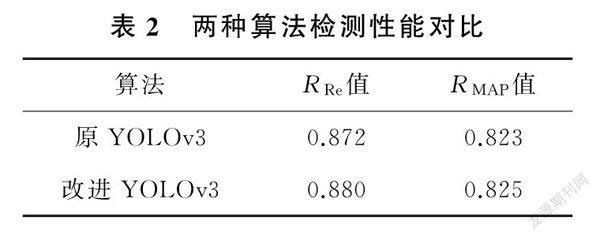
为更好地分析其性能提升效果,本文利用改进前后YOLOv3算法对目标检测的RRe值和RMAP值进行分析计算,两种算法检测性能对比如表2所示。
由表2可以看出,与原YOLOv3算法相比,改进后的YOLOv3算法对减速带和凹坑等路面正负障碍物目标检测RRe值和RMAP值分别提高了0.8%和0.2%。结果证明了本文对YOLOv3算法改进的有效性。
4结束语
本文主要对改进YOLOv3的路面正负障碍物进行检测研究。基于原YOLOv3目标检测算法,采用检测尺度扩增的方法对原YOLOv3网络结构进行改进,利用训练集对改进的YOLOv3算法进行模型训练,利用测试集完成对训练模型的测试实验。实验结果表明,改进后的YOLOv3算法在减速带和凹坑等路面正负障碍物检测的RRe值和RMAP值均有所提高,分别提高了0.8%和0.2%。下一步的研究重点是针对其它路面正负障碍物的特征,将模型应用于较复杂环境下更多种类路面正负障碍物的检测。
参考文献:
[1]HADSELLR,SERMANETP,BENJ,etal.Learninglong-rangevisionforautonomousoff-roaddriving[J].JournalofFieldRobotics,2009,26(2):120144.
[2]GONZALORC,THOMASS,CERROJ.Areal-timemethodtodetectandtrackmovingobjects(DATMO)fromunmannedaerialvehicles(UAVs)usingasinglecamera[J].RemoteSens,2012,4(4):10901111.
[3]JINGL,SHANGYY,HUID.Roadobstacledetectionbasedonrandomizedhoughtransform[C]∥Proceedingsofthe2ndInternationalConferenceonTeachingandComputationalScience.Shenzhen:AtlantisPress,2014:7274.
[4]YIX,SONGG,DERONGT,etal.Fastroadobstacledetectionmethodbasedonmaximallystableextremalregions[J].InternationalJournalofAdvancedRoboticSystems,2018,15(1):110.
[5]LINY,GAOF,LISZ.RoadobstacledetectioninstereovisionbasedonUV-disparity[J].JournalofInformationandComputationalScience,2014(4):11371144.
[6]王健.基于双目视觉成像的路面破损检测系统研究[D].重庆:重庆交通大学,2012.
[7]叶家玮,吴鹏,郑国梁.基于路面雷达的路面结构缺陷检测方法[J].华南理工大学学报(自然科学版),2004,32(9):8285.
[8]王荣本,余天洪,贾阳,等.基于边界提取和跟踪的石块检测方法研究[J].计算机应用,2006,26(1):114116,119.
[9]俞骏威,张黎明,陈凯,等.基于道路消失点的远距离路面微小障碍物检测[J].同济大学学报(自然科学版),2019,47(S1):213216.
[10]张兴旺,刘小雄,林传健,等.基于Tiny-YOLOV3的无人机地面目标跟踪算法设计[J].计算机测量与控制,2021,29(2):7681.
[11]叶佳林,苏子毅,马浩炎,等.改进YOLOv3的非机动车检测与识别方法[J].计算机工程与应用,2021,57(1):194199.
[12]景亮,王瑞,刘慧,等.基于双目相机与改进YOLOv3算法的果园行人检测与定位[J].农业机械学报,2020,51(9):3439,25.
[13]范丽,苏兵,王洪元.基于YOLOv3模型的实时行人检测改进算法[J].山西大学学报(自然科学版),2019,42(4):709717.
[14]袁红斌,曹会群,欧群雍.基于激光测距雷达和机器视觉的障碍物检测[J].现代雷达,2021,43(5):5762.
[15]郁梅,蒋刚毅.采用快速路面重建的车道和障碍物检测新方法[J].仪器仪表学报,2002,23(2):144149.
[16]李盛辉,周俊,姬长英,等.基于全景视觉的智能农业车辆运动障碍目标检测[J].农业机械学报,2013,44(12):239244.
[17]KRIZHEVSKYA,SUTSKEVERI,HINTONGE.ImageNetcassificationwithdeepconvolutionalneuralnetworks[J].CommunicationsoftheACM,2017,60(6):8490.
[18]张素洁,赵怀慈.最优聚类个数和初始聚类中心点选取算法研究[J].计算机应用研究,2017,34(6):16171620.
[19]谭俊.一个改进的YOLOv3目标识别算法研究[D].武汉:华中科技大学,2018.-
ResearchonDetectionofPositiveandNegativeObstaclesonRoadSurfaceBasedonImprovedYOLOv3
GUShizhou,YANTianyi
(CollegeofMechanicalandElectricalEngineering,QingdaoUniversity,Qingdao266071,China)
Abstract:Thispaperaimsatthedetectionproblemofpositiveandnegativeobstaclesonroadsurfacesuchasspeedbumpsandpits.BasedonthebasicprincipleofYOLOv3algorithm,onthebasisoftheoriginalYOLOv3algorithm,theimprovedYOLOv3algorithmisobtainedbyusingthemethodofdetectionscaleamplification.Themodeltrainingiscarriedoutbyusingthetrainingsetofpositiveandnegativeobstaclesonroadsurfacesuchasspeedbumpsandpits.Thetrainingmodelistestedbythetestset.ThetestresultsshowthattheimprovedYOLOv3algorithmimprovesthedetectionabilityofpositiveandnegativeobstaclesonroadsurface,including0.8%increaseinRRevalueand0.2%increaseinRMAPvalue.Thisresearchcanbeappliedtothedetectionofpositiveandnegativeobstaclessuchasspeedbumpsandpitsbyintelligentvehiclesandhascertainpracticalapplicationvalue.
Keywords:improvedYOLOv3;positiveandnegativeobstaclesonroadsurface;detectionscale;modeltraining;modeltest
收稿日期:20211110;修回日期:20220107
基金項目:山东省自然科学基金资助项目(ZR2016EEM49)
作者简介:顾士洲(1997),男,硕士研究生,主要研究方向为车辆动态仿真与控制技术。
通信作者:严天一(1970),男,博士,教授,硕士生导师,主要研究方向为车辆系统动力学及其控制技术。Email:yan_7012@126.com
