基于FPCA与DEELM的弹药协调机械臂性能故障诊断
2022-03-28闫少军
闫少军,文 浩
(1.内蒙古第一机械集团有限公司,内蒙古 包头 014000;2.南京理工大学 机械工程学院,江苏 南京 210094)
弹药协调器是大口径火炮弹药自动装填系统的重要部件,负责从弹仓和药仓中接受弹丸和模块药并传输至炮尾后部推弹线上。弹药自动装填系统是一个存在冲击载荷且工作环境恶劣的复杂机电液一体化系统,在使用中存在诸多故障,例如协调器液压系统故障引起定位精度超差,严重影响火炮武器系统的可靠性。如何从系统状态信息中提取表达系统状态的量化的故障特征,是实现弹药自动装填系统智能故障诊断的关键之一。
传感器检测得到的系统状态信息不能直接使用,需要进行特征提取,将信号中的故障特征信息和与故障无关的特征信息分离,同时起到降维的作用。在弹药自动装填系统的故障诊断研究中,特征提取方法主要采用经典信号处理方法和多元统计分析方法。机电系统中的大多数物理量随时间的变化曲线都是连续且具有一定平滑性的,通常以离散点集形式表示,传统的信号处理方法忽略了数据本身的平滑特性。函数型数据分析(functional data analysis,FDA)将观测数据表示为平滑的曲线或连续的函数,实现有限维数据到无限维数据的转换,得到的数据信息更丰富、可靠,目前FDA已广泛应用于工业生产监督和金融领域等。在故障诊断领域中,FPCA用于提取故障特征,文献[7]使用FDA建立了弹药协调器故障因素与故障特征之间的对应关系,通过BP神经网络进行诊断,但由于无法对真实的装备破坏以获取故障样本,只是利用仿真样本对诊断方法的可行性进行了验证。
本文针对某弹药协调机械臂定位精度超差性能故障,基于FPCA对协调过程中的支臂角位移曲线进行特征提取,并对提取的特征进行分析与选择,将选择的特征参数作为故障特征集,通过DEELM实现故障诊断,使用仿真数据与模拟故障实验数据验证了该方法的可行性。
1 协调机械臂动力学建模
图1为某弹药协调器的原理实验台架,支臂由MAXON直流电机通过2个行星齿轮减速器驱动,负载安装在支臂自由端;气弹簧连接到支臂上,用于平衡支臂和负载的重力矩,减小驱动电机的负载;采用PC作为上位机,编码器提供支臂的角位移和角速度信号。
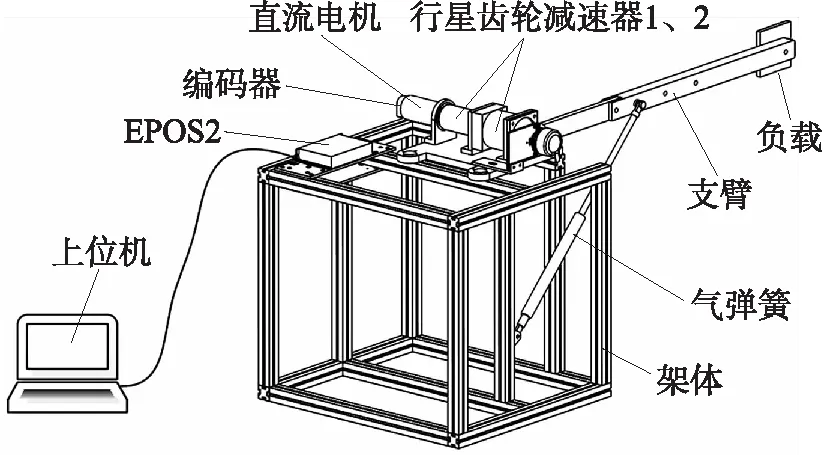
图1 协调机械臂实验台架
真实的系统不便于对故障因素进行人为设定,为了便于获取故障样本数据,建立协调机械臂的动力学模型,以支臂为系统的等效构件,其动力学方程为

(1)
式中:为支臂的角位移;为电机转子的转动惯量;,分别为行星齿轮减速器1和行星齿轮减速器2的转动惯量;为系统总的传动比,=;和分别为行星齿轮减速器1和行星齿轮减速器2的传动比;和为行星齿轮减速器1和行星齿轮减速器2的传动效率;为支臂的质量;为负载的质量;为支臂质心至支臂转轴中心的距离;为负载质心至支臂转轴中心的距离;为直流电机的输出转矩;为气弹簧对支臂提供的平衡力矩;为支臂与负载的重力矩,为支臂转轴处的摩擦力矩。气弹簧活塞杆和外筒的质量较小且运动速度相对缓慢,在计算时忽略了气弹簧的动能。
采用比例-微分控制,驱动电机的输出力矩为

(2)
式中:为电机转矩常数,为电机期望电流,为编码器测量的角位移与目标角位移之间的偏差,=20-,为编码器输出信号与真实信号的比值,为支臂真实角位移;为比例放大系数;为微分常数。
平衡力矩取决于支臂转角和气弹簧气体压力:

(3)
式中:为气弹簧提供的平衡力方向与支臂转轴中心的距离,为气弹簧内部气体初始压力,为气弹簧活塞面积,为气体初始体积,Δ为活塞行程,为气体多变指数,在特定的热力学过程中可以认为是定值。和Δ都与支臂角位移有关。
支臂和负载的重力矩取决于支臂的角位移:
=cos(+)+cos(+)
(4)
式中:为初始位置支臂质心与支臂转轴中心连线和水平线之间的夹角。
支臂转轴处的摩擦力矩通过LuGre摩擦模型来描述,LuGre模型能够较准确地描述摩擦过程中的黏滑运动、摩擦滞后、预滑动位移和变最大静摩擦力等特性,它假设接触面通过弹性鬃毛接触,鬃毛的平均偏移量用表示,鬃毛的弯曲产生了摩擦力矩,模型表示为
(5)
()=+(-)e-||
(6)

(7)
式中:为支臂角速度,为鬃毛的刚度,为微观阻尼系数,为黏性摩擦系数,()描述了Stribeck效应,为库伦摩擦力矩,为静摩擦力矩,为Stribeck特征速度,为形状校正系数。摩擦模型参数中,和属于动力摩擦因数,、、、和属于静力摩擦因数。
根据式(1)~式(7)可对协调机械臂的协调过程进行求解。协调机械臂的动力学解析模型中有些参数是未知且难以测量的,如气弹簧的初始压力,气体多变指数以及LuGre摩擦模型中的静力摩擦和动力摩擦因数,这些参数通过辨识的方法获取,参数辨识过程在这里不展开叙述。
以20°为协调目标角度,进行了3次协调过程的测试,最终支臂角位移分别为19.73°,19.66°和19.63°;同时,利用协调机械臂解析模型进行相同状态下的仿真,最终支臂角位移为19.54°。仿真结果与测试结果对比如图2所示。由图2可知多次协调过程的一致性较好,并且解析模型的输出与测试结果较为吻合,表明协调机械臂的解析模型能够较好地反应真实系统的特性。
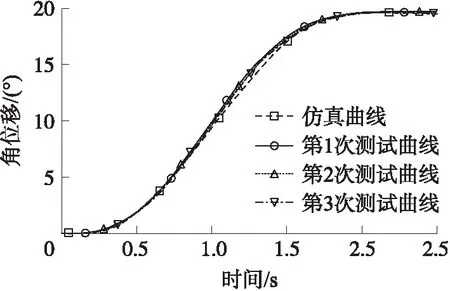
图2 仿真结果与测试结果对比
2 抽样仿真与模拟故障实验
协调机械臂的协调过程为在2.5 s内向下转动20°,并且要求定位精度不超过±0.6°,其性能故障表现为定位精度超差。根据实际弹药协调器的调研情况,结合协调机械臂实验台架的结构特点分析,选取造成定位精度超差的原因为气弹簧初始压力变化和支臂角位移测量误差,即和偏离正常值范围。分别改变动力学解析模型中和的值进行协调过程仿真,得到的临界取值范围为1.02~1.57 MPa,的临界取值范围为[0.955,1.0]。考虑到2种因素同时偏离正常取值范围的情况,定义表1所示的故障类型与代号。
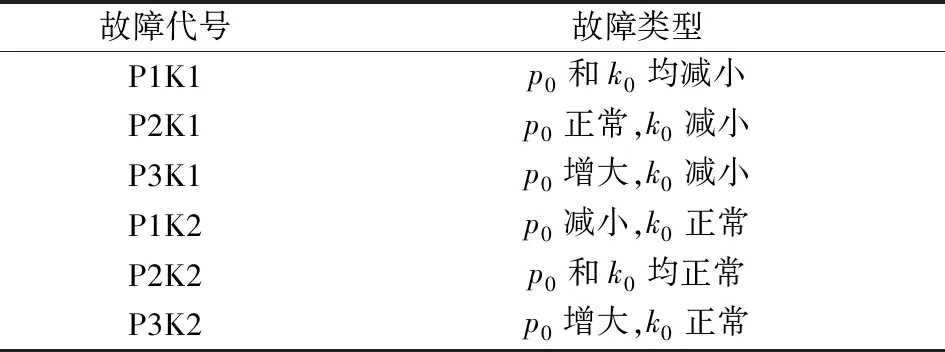
表1 故障类型代号
分别在表1所示的6种故障类型对应的和取值范围内进行拉丁超立方抽样,然后将其代入动力学解析模型中,仿真得到支臂角位移曲线,每种情况抽样仿真30组,共得到180组样本。
利用协调机械臂实验台架进行模拟故障实验。在保持初始位置气弹簧与支臂夹角不变的情况下,通过改变气弹簧的长度来模拟气弹簧初始压力变化;在LabView程序中将编码器反馈的角位移信号乘以系数模拟编码器测量误差,表1所示的每种故障类型进行2组模拟故障实验,得到12组实验样本曲线。
将上述仿真得到的曲线,每种情况随机选择25组作为故障诊断模型的训练样本,共150组;每种情况剩余的5组仿真样本与模拟故障实验的12组实验样本共同作为测试样本,共42组。
3 基于FDA和FPCA的曲线特征提取
3.1 数据函数化与平滑处理
在对协调器支臂角位移曲线进行FPCA特征提取时,首先通过B样条基函数将样本数据函数化,利用粗糙惩罚函数对函数化后的样本数据进行平滑处理。
假设第(=1,2,…,)个观测样本包含一系列离散的观测数值1,2,…,,对应的采样时刻为1,2,…,,其函数形式()由个已知相互独立的基函数()的线性组合表示:
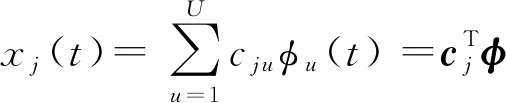
(8)
式中:=(()()…())为个基函数()组成的函数型向量,=(12…)为相应的基函数系数向量。
对于非周期性数据通常采用B样条基函数展开,B样条函数根据以下方程组进行递归求解:
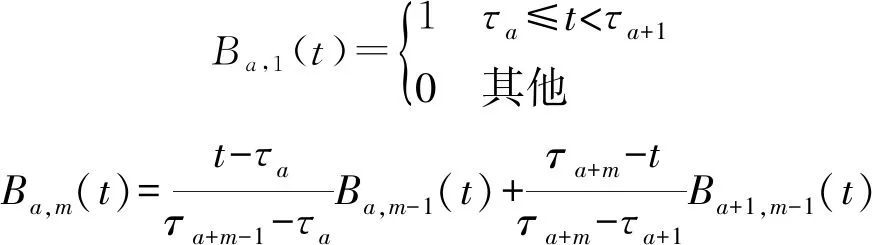
式中:(=1,2,…,)为区间[1,]上的等间距节点,为B样条基函数的阶数,且>1。
估计系数向量最简单的方法是利用最小二乘准则最小化误差平方和,求解时基函数()的个数越大,估计值的偏差越小,方差越大,平滑性越差,为控制平滑程度,引入二阶粗糙度惩罚():
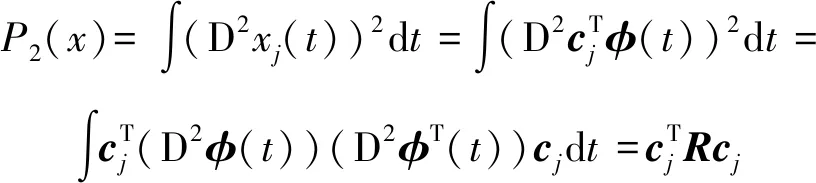
(9)

令为加权矩阵,为平滑参数,使用加权最小二乘法最小化误差平方和估计系数向量:

(10)
式中:为观测样本的向量形式,为基函数离散值组成的×阶矩阵。
基函数系数向量的估计值为

(11)
3.2 函数型主成分分析方法
主成分分析法是一种经典多元统计分析方法,也是一种常用的降维方法,FPCA是主成分分析到Hilbert空间的推广,其主成分是特征函数。根据RAMSAY等的推导,特征函数()满足以下方程:

(12)
V=
(13)
主成分函数同样需要平滑处理,考虑最大化带有粗糙度惩罚的样本方差:
(14)

(15)
对应的广义特征值问题:
=(+λ)
(16)
进行Cholesky分解+λ=,定义=,式(16)转化为
()()=()
(17)
定义=,式(17)可写为
()=ρ
(18)
这是标准的特征值问题,可依次求解出、和特征函数。类似于传统的主成分分析,按照上述过程可以得到前阶主成分函数。将去均值后的样本函数与各个特征函数作内积:
(19)
式中:()为第(=1,2,…,)阶主成分函数。
所得结果作为函数型主成分得分(functional principal component score,FPCS),即FPCA提取的曲线特征参数。
3.3 样本曲线特征提取
首先将仿真样本数据和实验样本数据函数化,使用图3所示的4阶B样条基函数进行函数展开,同时使用平滑参数为100的2阶粗糙惩罚函数进行数据平滑,图4为函数化后的样本数据。
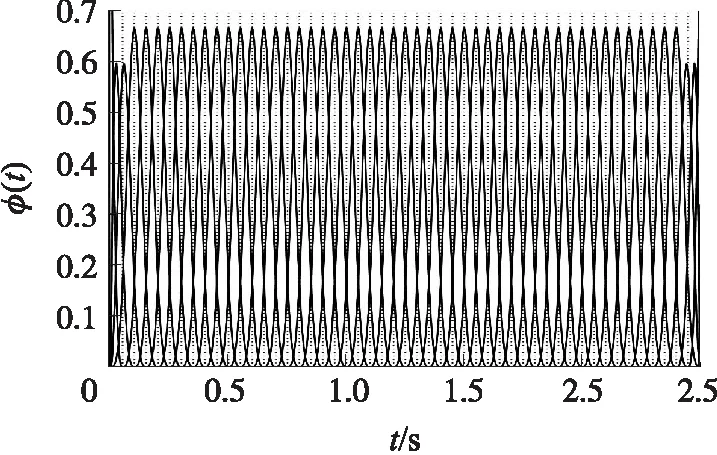
图3 B样条基函数系统
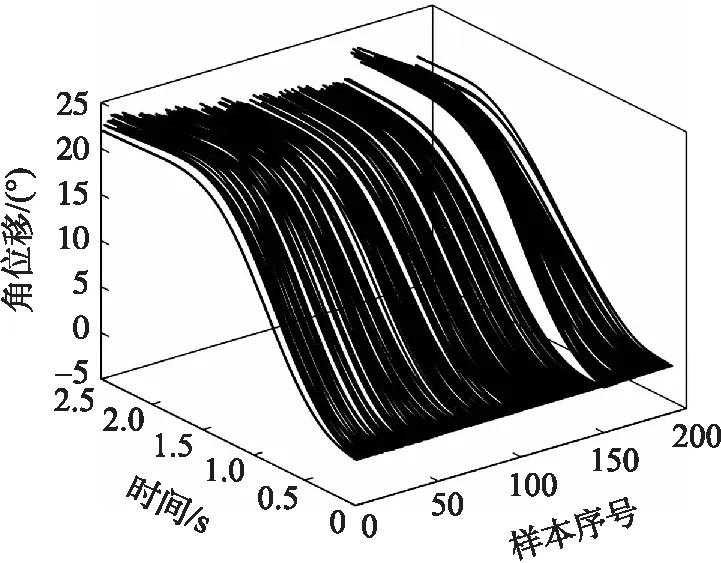
图4 函数化后的角位移曲线
样本数据函数化后去均值,采用与函数化过程同样的粗糙度惩罚函数和平滑参数计算前10阶主成分函数,并计算前10阶主成分函数的占比,即按式(18)计算得到的各特征值占其总和的比率,前3阶主成分函数占比为0.980 2,0.016 3和0.003 0,累计占比为0.999 5,第4到第10阶主成分函数占比很小,因此保留了前3阶主成分函数,如图5所示。
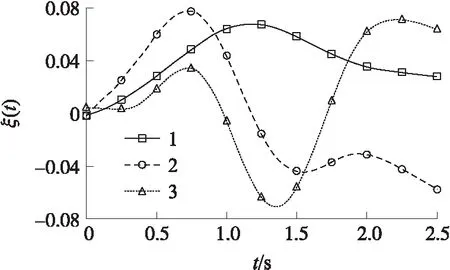
图5 角位移曲线前3阶主成分函数
对函数化后的样本曲线与前3阶主成分函数进行内积计算得到FPCS。图6为150组训练样本数据的前3阶FPCS,第1阶和第2阶FPCS能够较好地体现曲线特征对不同系统状态的反映,因此选取前2阶FPCS作为支臂角位移曲线的特征参数,并将其作为ELM的输入参数。提取的特征参数对不同故障类型的分类效果如图7所示。
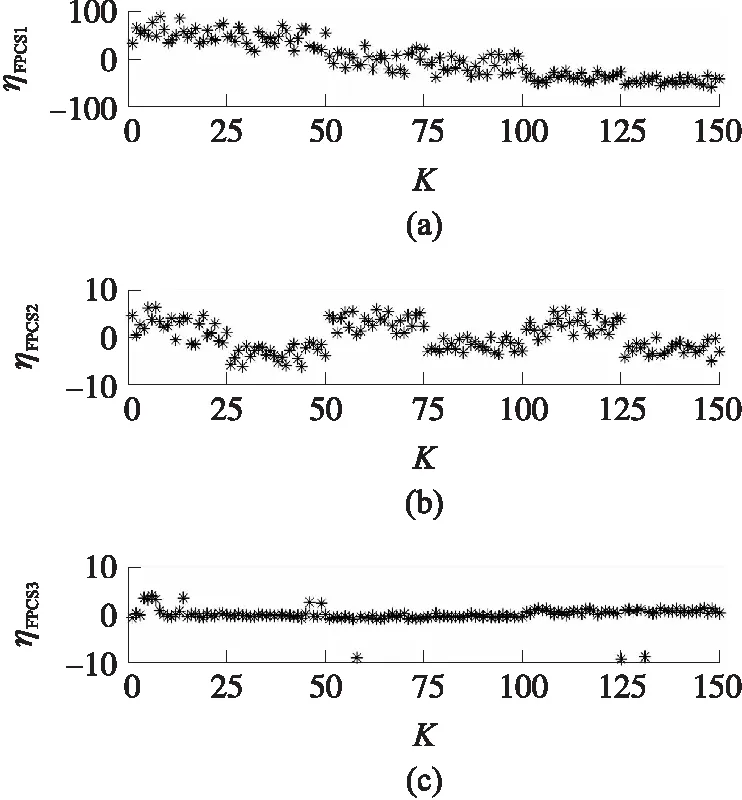
图6 训练样本数据前3阶FPCS
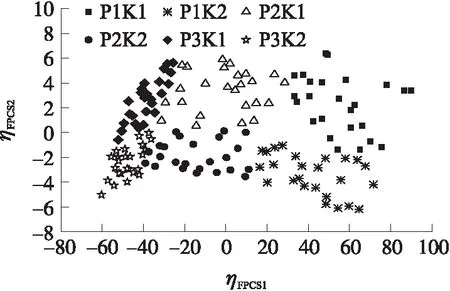
图7 前2阶主成分得分的分类效果
4 基于DEELM的故障诊断
4.1 基于DEELM的故障诊断模型
极限学习机(extreme learning machine,ELM)是一种基于单隐层前馈神经网络的机器学习算法,广泛应用于分类和回归问题。分类问题的ELM网络如图8所示,输入层为对应特征参数的个节点,隐含层有个节点,输出层节点为对应的分类。
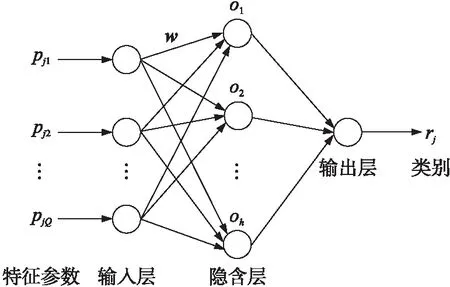
图8 ELM的网络结构
由于ELM隐含层与输入层的连接权值和隐含层阈值是随机生成的,并且可能存在参数为0的无效节点,其训练结果具有随机性,使用优化算法优化ELM能够提高其准确率和泛化能力。
差分进化(differential evolution,DE)算法是在遗传算法的基础上提出的,具有能够快速收敛并且不易陷入局部最优的优点。在确定ELM隐含层节点数目后,利用差分进化算法对ELM的隐含层输入权值和阈值进行优化能够提高ELM的性能,具体过程如下:
①设置初始参数,确定ELM的隐含层节点个数和DE算法的种群大小、种群迭代次数、变异因子、交叉概率等参数;
②随机生成初始种群,种群中的个体作为ELM的隐含层节点参数和,以ELM测试集的预测正确率为适应度函数,计算每个个体的适应度值;
③对每个个体进行变异、交叉和选择操作,得到新一代种群;
④重复过程③直到达到指定的迭代次数;
⑤输出最优的隐含层节点参数和,训练性能最优的ELM。
本文提出的FPCA和DEELM算法结合的协调机械臂性能故障诊断模型如图9所示。首先采集不同故障类型下协调机械臂协调过程中的支臂角位移信息,以函数的视角对支臂角位移信息进行分析,将其表示为平滑的函数曲线,利用FPCA方法提取曲线特征参数作为故障特征集。将训练样本的故障特征集与对应的分类标签作为ELM的输入与输出进行训练,同时利用DE算法对ELM的隐含层参数和进行优化,得到性能最优的ELM作为故障识别器。然后对待识别样本进行FPCA特征提取,将特征参数输入到训练好的DEELM中,对待识别样本进行诊断测试。
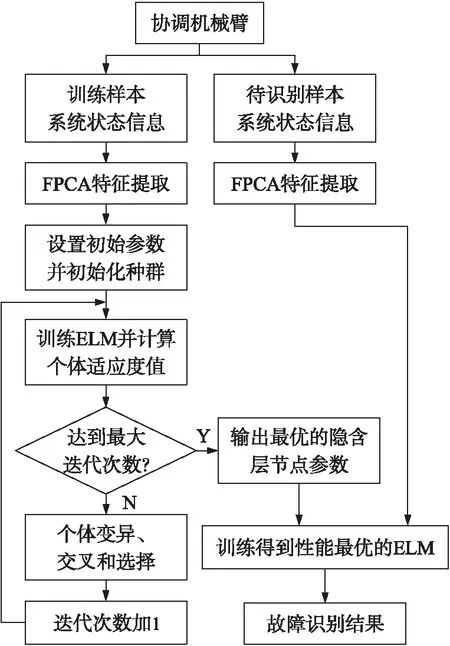
图9 故障诊断模型
4.2 诊断结果
按照图9所示的故障诊断流程,将FPCA提取的150组训练样本的支臂角位移曲线特征参数作为DEELM的输入参数,对应的故障类型作为输出参数,设置隐含层节点数为30,DE算法中种群个数为100,变异因子为1,交叉概率为0.7,最大迭代次数为50,进行DEELM训练,得到最优的DEELM后对42组测试样本进行诊断测试,同时利用ELM进行诊断测试作为对比。为了不失一般性,进行了10次测试,结果如表2所示。
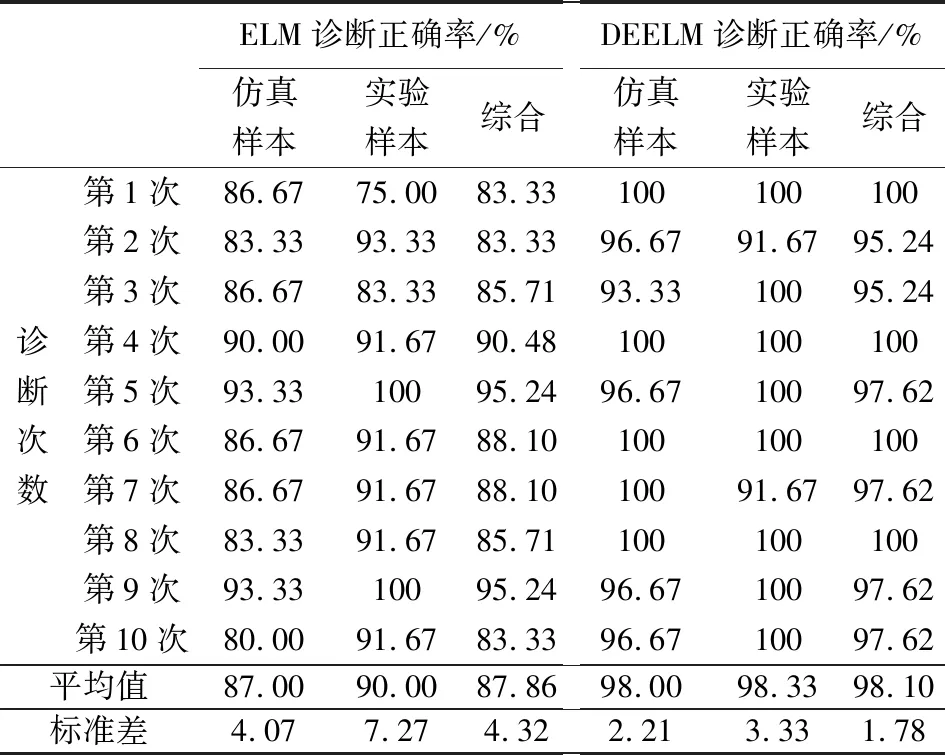
表2 10次故障诊断正确率
由表2可知,DEELM诊断正确率的平均值比ELM高,标准差比ELM小,表明通过DE算法优化ELM能够提高ELM的诊断正确率,并且其性能更加稳定。DEELM对30组仿真样本和12组实验样本的诊断正确率分别达到98.00%和98.33%。
表3给出了利用DEELM的10次诊断测试结果中各种故障类型的诊断正确率平均值,可以看出6种故障类型中没有诊断正确率明显低的情况,造成个别样本诊断错误的原因可能是训练样本故障特征集的不完备性导致的。诊断结果表明,本文提出的FPCA与DEELM结合的方法能够实现协调机械臂的性能故障诊断。
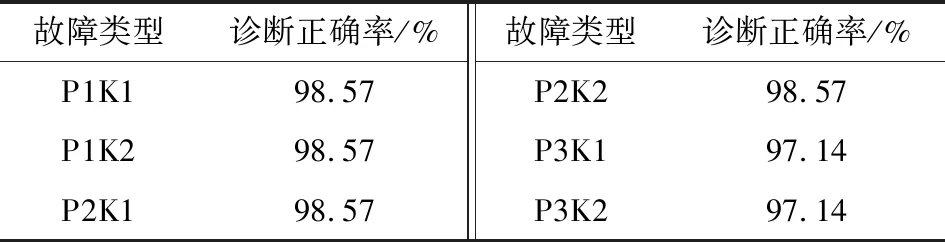
表3 6种故障类型10次诊断正确率平均值
5 结束语
本文针对弹药协调机械臂定位精度超差的性能故障,提出了一种基于FPCA和DEELM的故障诊断方法。
①包含故障参数的协调机械臂动力学解析模型能够近似表示真实的协调机械臂系统,并且便于获取大量仿真故障样本数据,利用协调机械臂实验台架进行模拟故障试验能够获取真实故障样本数据。
②协调机械臂发生性能故障会引起支臂角位移信号的变化,FPCA能够有效提取支臂角位移信号中的故障特征成分,所提取的特征参数对6种故障类型的分类效果较好。
③DEELM具有比ELM更稳定的性能,基于DEELM的10次故障诊断测试,仿真样本和实验样本的诊断正确率分别为98.00%和98.33%,表明该方法能够对协调机械臂性能故障进行有效诊断。