核反应堆容器检测平台精确定位方法
2022-03-25夏志鹏陈海林周维虎翟中生
熊 芝,夏志鹏,陈海林,周维虎,翟中生
(1.湖北工业大学 机械工程学院,湖北 武汉 430068;2.中国科学院微电子所,北京 100094;3.中核武汉核电运行技术股份有限公司,湖北 武汉 430068)
0 引 言
核电站反应堆压力容器是核电站最重要的设备之一。在核电站反应堆压力容器的役前与在役检查大纲中,要求必须对压力容器顶盖中的贯穿件焊缝实施定期检测。反应堆压力容器顶盖在进入在役阶段后,因受到核能辐照会存在很高的放射性而变成红区,人员无法直接停留在反应堆压力容器顶盖下方。因此,反应堆压力容器顶盖堆焊管、座焊缝及贯穿件焊缝的在役检验必须采用自动化检测的方式。现阶段的定位手段主要采取二维码辅助人工微调,该定位方法要求操作者具有一定经验,定位效率和精度较低。
针对上述问题,本文在核反应堆容器检测平台即有的定位系统上,提出一种基于视觉的精确定位方法。该方法重点研究精确定位分系统设计、线结构激光提取、贯穿件轴线拟合以及对中偏差值的求解,可实现检测平台的自动精确定位。
1 核反应堆容器在役检测系统组成
核反应堆容器在役检测现场主要由反应堆压力容器顶盖、贯穿件、定位二维码和检测平台组成,如图1 所示。反应堆压力容器顶盖中的贯穿件为检测对象,每根贯穿件与唯一一个定位二维码对应,检测平台定位后对贯穿件内外缺陷进行检测。
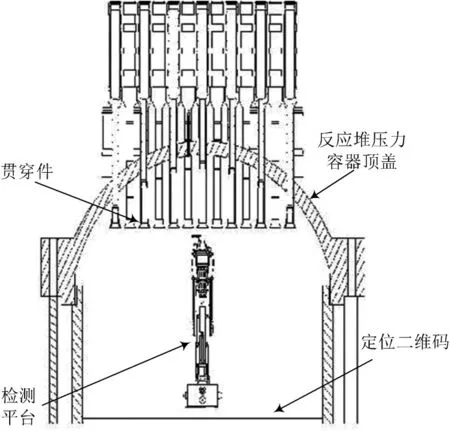
图1 核反应堆容器在役检测系统
检测平台的底部安装摄像头,每个定位二维码记录待检贯穿端面圆与运载小车检测时的位置信息。开始检测时,检测平台根据记录的二维码位置移动到对应的待检贯穿件端面圆下,定位误差为10~25 mm。随后检验设备依靠探头上对称分布的两摄像头监控成像辅助人眼观察进行手动调整,当贯穿件图像位于两相机像平面中心即完成检测平台的最终定位。但该方法尚未脱离人工干预,无法满足现场自动检测的要求。
2 基于机器视觉的精确定位方法
2.1 精确定位分系统设计
用机器视觉检测方法可以大大提高定位效率和定位的自动化程度,因此本文设计一套基于机器视觉的精确定位分系统,以提高检测平台的定位精度与定位效率。精确定位分系统通过测量检测探头与待检贯穿件轴线偏差值,指引运载小车完成检测平台的定位运动。检测平台精确定位流程如图2 所示。

图2 检测平台精确定位流程
为增强被测特征并提高测量精度,文中采用线结构光结合双目视觉的定位方法。CCD 相机与线结构激光器组成的精确定位分系统如图3 所示。精确定位分系统以一固定倾角安装在检测探头下方,如图4 所示。
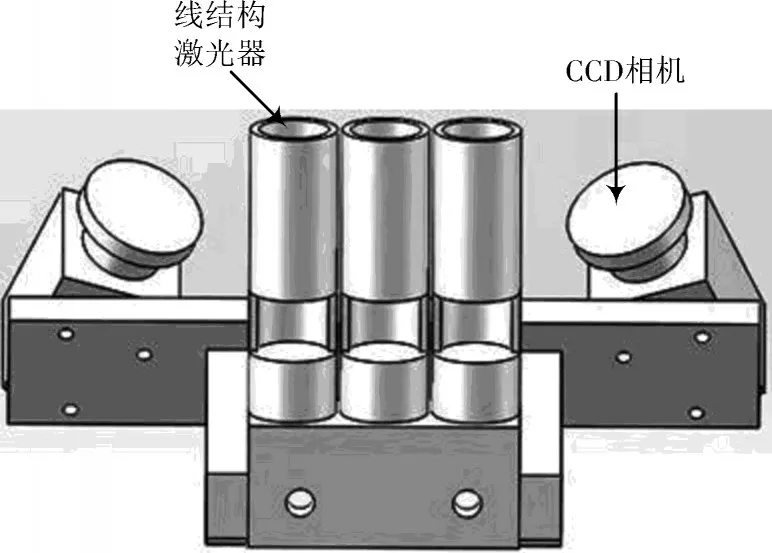
图3 精确定位分系统
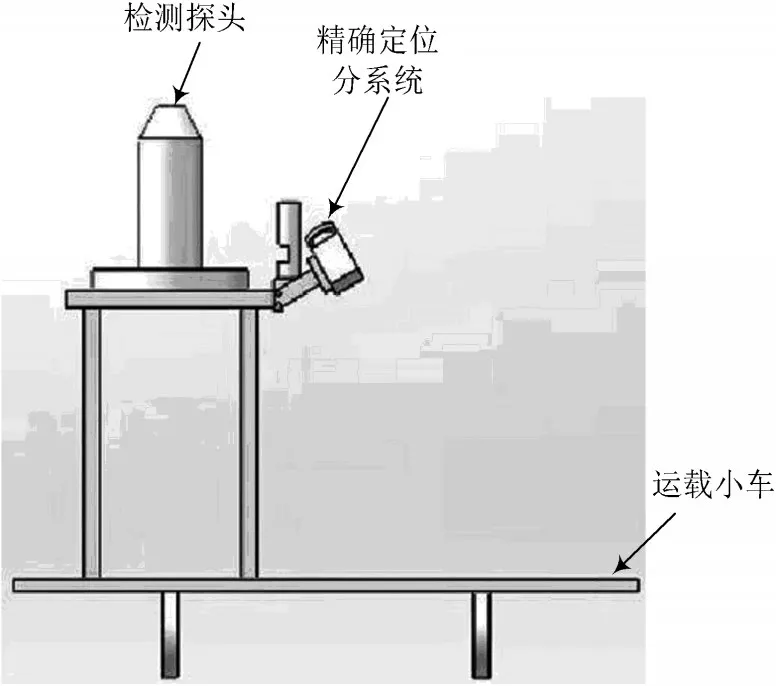
图4 检测平台
2.2 精确定位分系统布局
2.2.1 相机布局
2 个CCD 相机处在同一平面内且与垂直面呈一定夹角,相机光轴与基线呈一定夹角,当检测探头处于正下方时,待检贯穿件图像位于两相机像平面中心,相机布局如图5 所示。为保证测量精度的同时满足现场尺寸要求,相机基线的长度调整范围为150~250 mm。
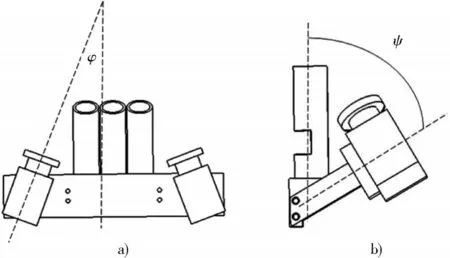
图5 相机布局
2.2.2 线结构光布局
单个线结构激光器在贯穿件表面形成的图像如图6a)~图6c)所示。由图可知,线结构光未能与贯穿件上端面圆相交,经过三维重建后未能完全体现出整个贯穿件的几何特性。
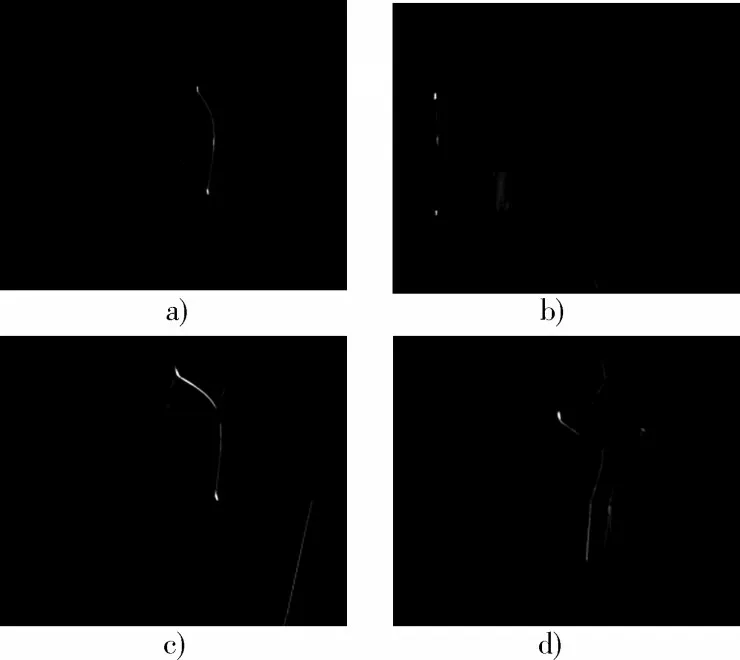
图6 贯穿件表面激光图
根据贯穿件上端面圆直径与粗定位偏差,对线结构激光方向与排布间距进行调整,调整后的图像如图6d)所示。这种方法可保证在最大偏差内贯穿件表面线结构光能反映完整的几何特性,也便于后续线结构光三维重建。线结构光方向如图7 所示。

图7 线结构光方向
2.3 精确定位分系统标定
精确定位分系统标定包括双目相机标定、相机与检测平台坐标系转换以及检测探头轴线标定。其中,双目相机标定采用张正友标定法为常见手段,相机与检测平台坐标系转换可借助绝对关节臂辅助完成。检测探头轴线为检测平台精确定位的对中基准,由于检测探头轴线无法直接通过双目视觉进行三维重建获取,所以本文设计探头轴线标定辅助件,如图8 所示。
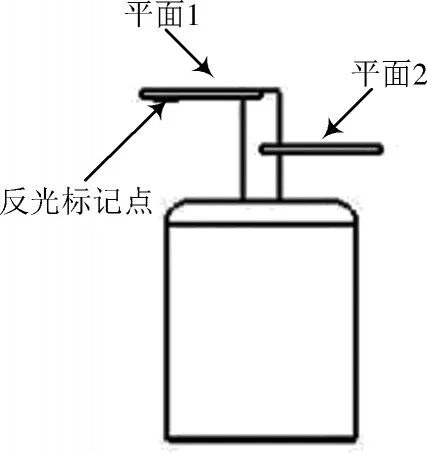
图8 探头轴线标定辅助件
图8 中探头轴线标定辅助件伸出的两平面上贴有反光标记点,辅助件旋转轨迹圆圆心连线即为检测探头轴线。
3 贯穿件轴线的测量
采用线结构光增强待检贯穿件的特征。进行贯穿件轴线测量时,依次打开激光器,双目视觉系统采集激光器单独打开时在待检贯穿件表面形成激光的图像;再对处理后的图像进行三维点云恢复,采用平面切割法拟合贯穿件轴线。贯穿件轴线测量步骤如图9 所示。
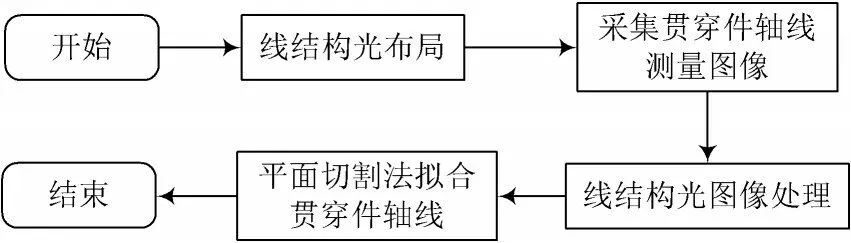
图9 贯穿件轴线测量步骤
3.1 目标激光提取
利用线结构激光器对贯穿件进行照射时,贯穿件表面反光造成相机采集的图像当中存在许多杂质激光,通过图像处理算法对目标激光进行筛选。线结构光图像处理 步骤如图10 所示。

图10 线结构光图像处理步骤
图像采集后,对激光图像进行预处理以消除激光图像中的噪声,恢复有用的真实信息增强目标激光的可检测性。由于贯穿件表面不均、磨损以及相机拍摄角度不同,经线结构光图像预处理后存在激光区域断裂的现象。根据同一线结构光在相机中倾斜弧度相同,设置最大连接距离对断裂区域进行连接。目标激光为同一线结构激光器发出,故外接矩形倾角差mod 应该满足20°>mod 或mod>160°。由分析需提取的目标区域可知,最大有效区域即为所需的提取目标区域之一,由此完成对线结构激光的图像提取。提取结果如图11 所示。
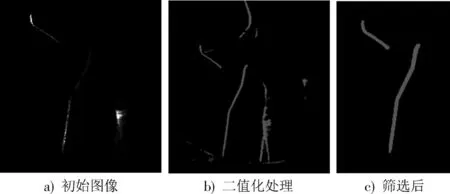
图11 激光图像处理效果
3.2 平面切割法拟合贯穿件轴线
对双目相机采集的图像进行处理后,采用极线约束进行同名点匹配,结合相机内外参数获取3 组线结构光在相机坐标系下的三维点云。采用平面切割法对贯穿件轴线进行拟合,拟合过程如图12 所示。
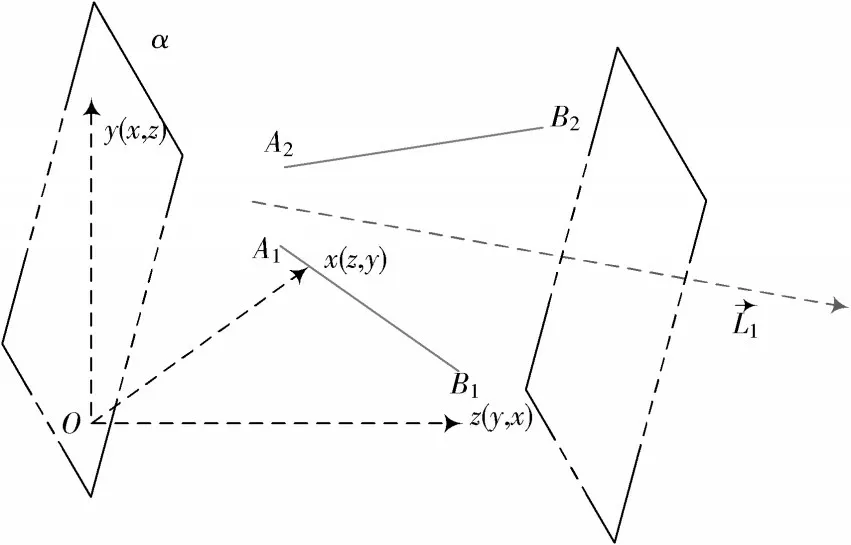
图12 平面切割法拟合贯穿件轴线
由于检测探头轴线与待检贯穿件轴线均为竖直,根据第2.2 节中的检测探头轴线得到贯穿件轴线的法平面为:

当=0 时,该法平面经过相机坐标系-的原点,根据式(3)求得3 组三维点云(和代表其中一组线结构光透过贯穿件端面圆后的三维点云)中所有点到平面的最大距离与最小距离,如下:

令≤≤,且按梯度1 增加,得到每个平面与三维点云的交点。当平面与三维点云交点大于等于4 个时,采用空间圆拟合算法求得每个平面中空间圆的圆心,对所有圆心采用最小二乘法进行拟合得到待检贯穿件轴线。
3.3 对中偏差值解算
检测探头与贯穿件轴线在检测平台坐标系中,方向的偏差即为对中偏差值。
根据两点式求出探头轴线方程为:

取拟合的贯穿件轴线的重心,则点到探头轴线垂足为:
式中:

垂足与贯穿件轴线重心通过坐标系转换得到点与,表示为:

式中,,代表相机坐标系与检测平台坐标系的转换关系。指引运动平台完成定位的对中偏差值为:
4 模拟现场实验
4.1 实验方法
为验证本文精确定位分系统的有效性,在核反应堆容器模拟检测现场进行实验,如图13 所示。待检贯穿件下端面圆直径为172 mm,精确定位分系统测量距离为300~500 mm,为保证测量需求,选择8 mm 焦距,500 万像素的工业相机,以及波长860 nm、线长1 m、功率10 mW 的一字线结构激光器。
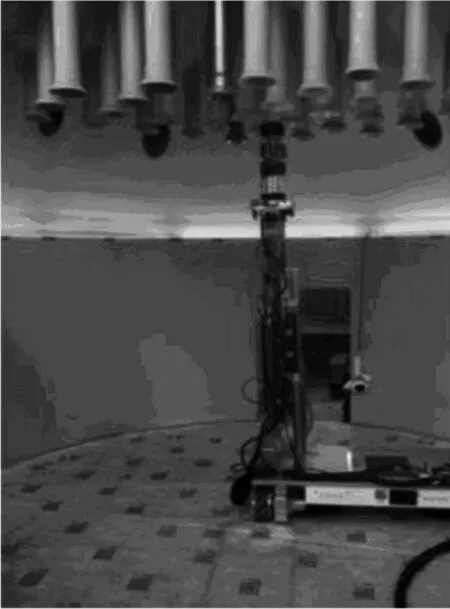
图13 核反应堆容器检测现场
采用精确定位分系统分别对贯穿件进行16 次定位实验。令绝对关节臂测量检测探头轴线与待检贯穿件轴线距离为,用来评价精确定位系统的最终定位效果。本文采用海克斯康6 轴绝对关节臂,该绝对关节臂量程范围为1.2~2.5 m,测量精度为0.001 mm。
4.2 实验结果
对待检贯穿件表面线结构光的图像处理经三维重建,得到待检贯穿件轴线的三维点云,根据平面切割法拟合贯穿件轴线,贯穿件轴线拟合的三维点云如图14所示。
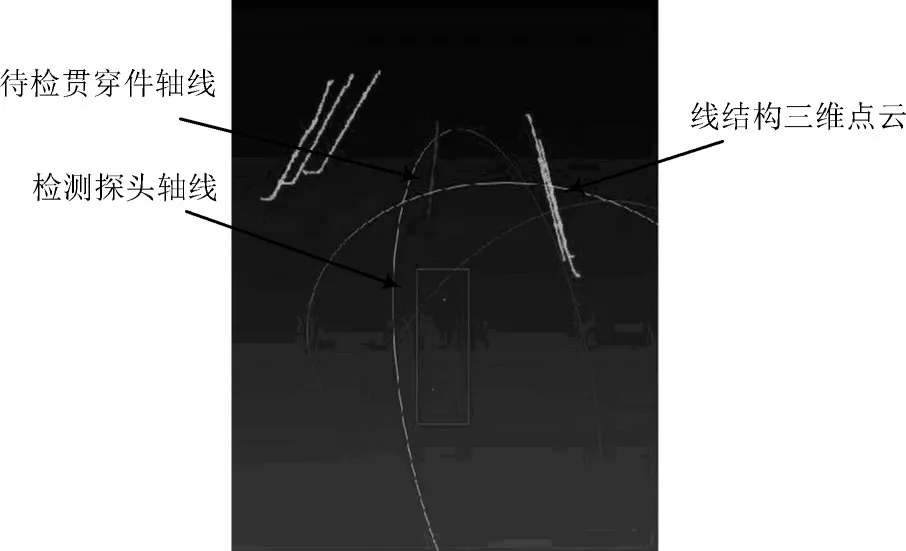
图14 三维点云恢复图
检测平台根据精确定位分系统测量出的对中偏差值进行定位运动,待精定位完成后,利用绝对关节臂测量贯穿件轴线与探头轴线距离,结果如表1 所示。
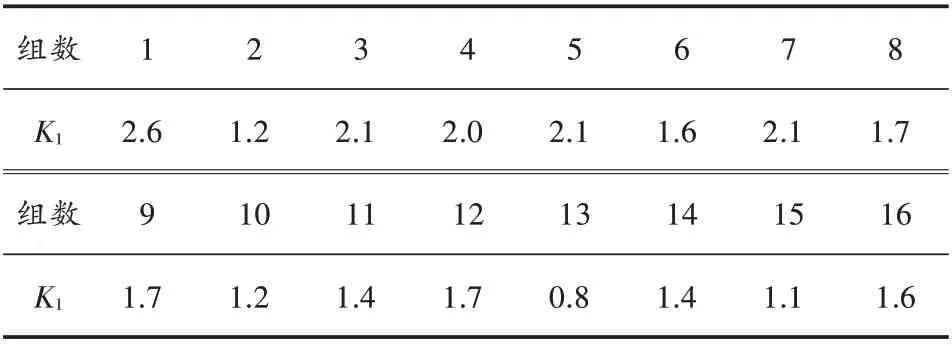
表1 精确定位分系统定位误差 mm
检测平台经过精确定位后的误差分布如图15所示。
由图15 可知,在16 次定位实验中检测探头与待检贯穿件轴线的对中偏差可控制在2.6 mm 以内,定位误差平均值为1.6 mm。实验结果表明,本文提出的精确定位分系统具备完成检测平台定位任务的能力。
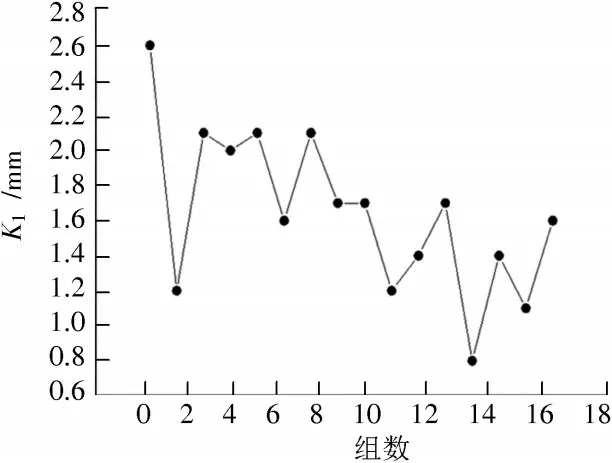
图15 精确定位分系统定位误差分布曲线
5 结 论
本文提出一种双目视觉结合线结构光的精确定位方法,在即有的定位平台上搭建精确定位分系统,通过精确定位分系统的标定以及待检贯穿件轴线测量完成检测平台的精确定位。最后通过实验验证本文方法的有效性。
本文研究得出的主要结论如下:
1)提出一种基于机器视觉的核反应堆容器检测平台精确定位方法,解决现有定位方法中需要人工操作、定位精度低的问题。
2)对精确定位分系统结构进行设计,并对相机与线结构激光布局进行分析,同时实现精确定位分系统的标定。
3)通过对目标激光提取以及基于三维点云的特征拟合,利用平面切割法方法实现贯穿件轴线测量。
4)在模拟检测现场对本文所提方法进行实验验证。实验结果表明,本文所提出的精确定位方法定位偏差绝对值可控制在2.6 mm 以内,满足现场要求定位偏差小于5 mm 的要求。
