地磁传感器的拟合集成校准
2022-03-24雒茁君裴东兴黄子遥荆志伟
雒茁君裴东兴*黄子遥荆志伟
(1.仪器科学与动态测试重点实验室,山西 太原 030051;2.中北大学电气与控制工程学院,山西 太原 030051)
地磁场是地球特殊的地理现象,随着科学技术的发展,人们在日常生活、探测资源等方面都使用了地磁场这天然的坐标系[1-2]。探测过程中,运用最多的就是地磁传感器。地磁传感器有受到外界干扰小,测量准确等优点,近年来在地质勘探、医疗、水下井下目标探测应用广泛[3-5]。
地磁场虽然总场值很大,但是在垂直和水平方向上的梯度很小,基本可以忽略,所以我们采用磁梯度张量的原理来进行测量。常用的结构有五种,其中包含三种平面结构和两种立体结构[6]。磁梯度张量仪上必须使用校准完成的传感器,引起磁传感器误差主要来源于两个方面:一是传感器自身的误差,由于在制作时不规范等原因,自身误差主要有三轴非正交误差、灵敏度偏差、零点漂移;二是安装误差,主要是由传感器中心错位以及传感器轴间指向偏差引起[7-9]。
目前国内外对于校准地磁传感器主要有两种途径[10]:第一种分别对传感器误差与安装误差进行校准;第二种是将传感器误差和安装误差集成在一起进行修正[11],如基于椭圆约束和椭球拟合的校正,非线性集成的校正算法[12],本方法采用第二种集成校准,总体分为两步,首先利用地磁场磁场总值对磁传感器误差进行校准,之后在对已经校准好的磁传感器进行轴间指向偏差校准。
1 误差校准模型
地磁场总磁场强度高达5万nT~6万nT,但是梯度值很小,是一个天然的大型匀强磁场[13-14]。因此可以在外界磁场干扰较小的地磁环境中对地磁传感器进行校准。传感器理想读数B c,对B c沿着三轴进行分解,分解为x轴方向的分量B c x,y轴方向的分量B cy,z轴方向上的分量B cz,那么有B c=通过表达式可以看出理想磁传感器读数的分布应是在一个以R为半径的圆球上。但是由于磁传感器在实际使用过程中,环境磁场中硬磁和软磁干扰,自身误差和轴间指向偏差的影响,使得圆球的圆心发生偏移,球体本身发生压缩形变,成为一个椭球体,并且受到传感器本身的噪声,温度等因素的影响,椭球体并不是标准椭球,会发生一定的形变[15-17]。因此求出误差系数,即可将有误差的磁传感器校准为标准磁传感器。
由于磁传感器在加工过程中由于生产焊接运输等因素,三轴无法保证完全垂直[18]。如图1所示,坐标系OXYZ为地磁传感器的理想坐标系,OX、OY、OZ方向为理想测量方向,并且彼此正交,实际地磁传感器的坐标系为坐标系OX1Y1Z1,OX1Y1Z1为传感器三轴实际输出方向,假设传感器的OZ轴和OZ1轴重合,OY1轴与OY轴之间的夹角为α,OX1与XOY平面间的夹角为θ,OX1轴在XOY面的投影与OX轴的夹角为φ。
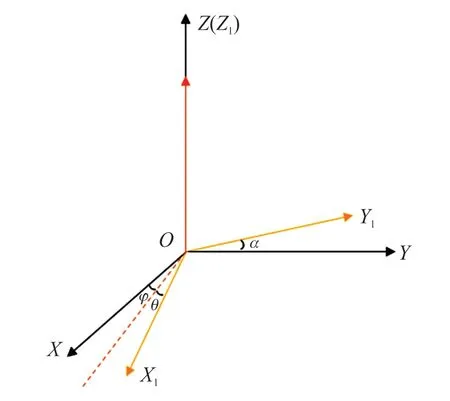
图1 地磁传感器三轴非正交角示意图
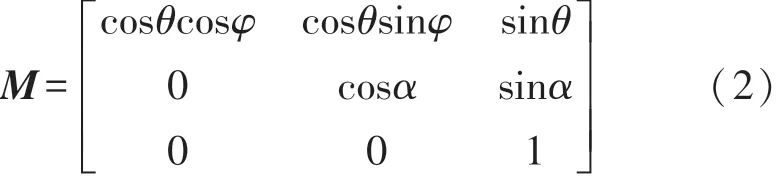
设B c=(B cx,B cy,B cz)T是地磁传感器理想输出,B r=(B rx,B ry,B rz)T为地磁传感器实际输出,假设不考虑其他误差,只存在地磁传感器三轴非正交误差时,可以求出三轴理想输出与三轴实际输出之间的转化公式:
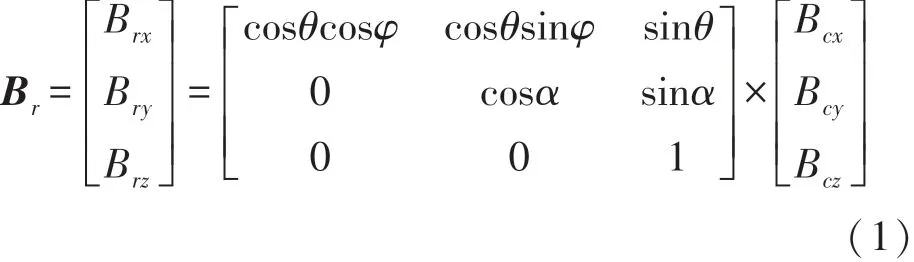
式中:有非正交误差矩阵M:
当考虑地磁传感器的其他误差时。如传感器三轴零位漂移误差,在没有磁场的情况下,传感器的测量值应该为0,但实际磁传感器输出并不为0,可假设零位漂移I=(i x,i y,i z)T。
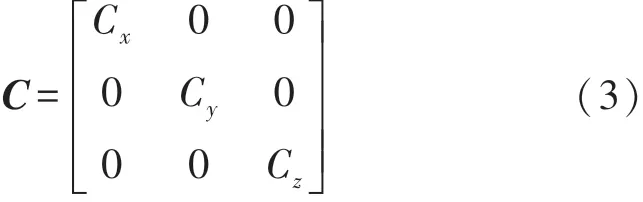
除了零位漂移误差之外,由于地磁传感器的三轴的传感器线圈具有不同的灵敏度,将传感器的测量值与真实值之比定义为灵敏度因子,设灵敏度标度因子C。
理想输出值B c与传感器实际输出值B r之间有如下的转换关系:

已知地磁传感器的实际输出值,根据式(4)可得到地磁传感器的理想输出校正方程,如式(5)所示:

式中:P为集成误差系数:
2 传感器椭球拟合校准
地磁场可以认为是稳定的均匀磁场,H是匀强磁场中总磁场强度,为一恒定值。

式中:Q=PTP。
对式(7)展开,可得

通过对式(8)的分析,考虑所有误差之后磁传感器的输出值在三轴坐标系下应为一个椭球体。椭球体的标准公式为ax2+by2+cz2+dx+ey+fz+m=0,由于环境中的各种干扰使得椭球产生偏移和旋转,于是椭球的表达公式变为:ax2+by2+cz2+dxy+eyz+fzx+gx+hy+kz+m=0。将磁传感器分别绕X轴、Y轴、Z轴进行旋转,得到多组测量数据,对传感器测量值进行二次曲面拟合,设第n个样本的真值为:

由于环境中的各种干扰en为残差,在第n个样本的观测值为:
每个男的在岁月里都存在两个女人的幻想,一个清纯,一个风骚。当然,这得是两个女人,而不是一个女人的结合,虽然有人的确能把这两者结合的很好,但关键是,她还是一个人,而男人总是希望什么都有两个。黄莹是这样的一个姑娘。在普通人眼里,他一看就是个风骚的人,而事实上,她的确就是个风骚的人。风骚的人会让全世界所有刚和她聊过一句的人都觉得有戏,并想入非非。

对于目标函数,minQ(a,b,c,d,e,f,g,h,k)=用微分极值原理求解待定估计参数,则有
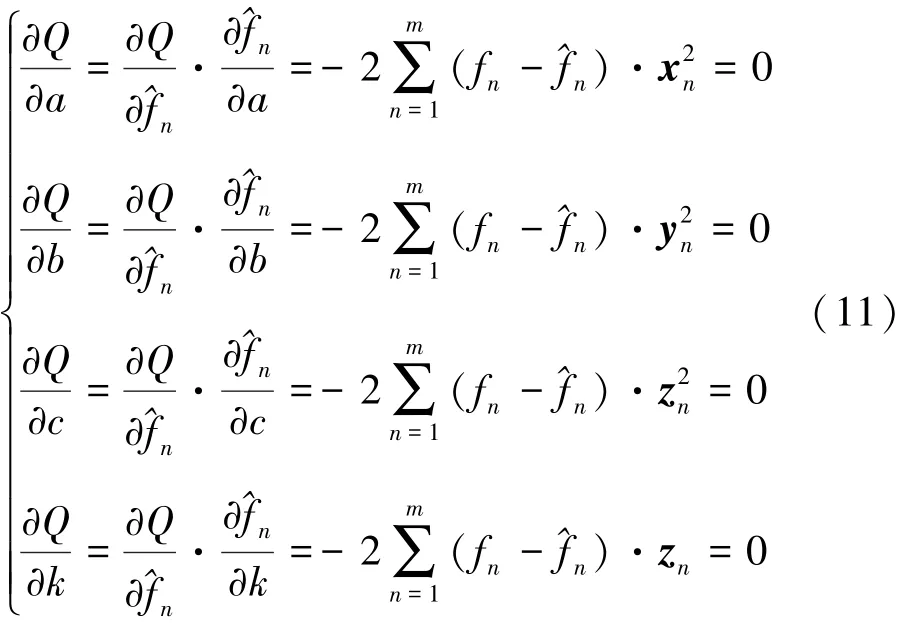
对上式方程组整理之后,令
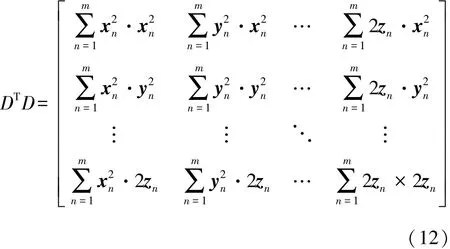
则有DTD[ab…k]T=DTC。

式中:D为样本构成的矩阵,C为样本值组成的向量,求解出所需要的9个参数a,b,c,d,e,f,g,h,k,得到唯一确定的椭球方程。
联立方程组进行求解,得到椭球的圆心坐标(x,y,z),表达式为(17)
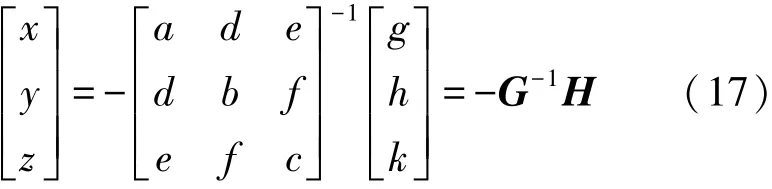
即为球体中心的偏移量I,代入表达式(9),可得到
3 地磁传感器校准实验
本次校准实验使用的是PNI传感器公司的RM3100型号的地磁传感器,由两个Sen-XY-f传感器线圈pn13104与一个Sen-Z-f传感器线圈pm13101,以及一个MagI2C(pn13156)控制芯片组成,能够对三维空间的磁场进行测量。RM3100的量程是-800μT,~800μT,完全满足本次实验的测量要求。
选择外界干扰较小的野外环境(无大型设备、无建筑物、无铁磁性物质)下进行校准实验,实验时间为15:00,实时温度为11℃。标准磁传感器采用Bartington公司的Mag13型号磁通门传感器,量程±60μT,测量地磁场总磁场均值为2 690 471.53 nT,以此作为标准值。地磁传感器绕三个轴分别旋转360°,先绕y轴旋转,后x轴,最后z轴,保证地磁传感器的三轴测量在同一点上,进行实时采样。共获得1 736组数据,未校准的数据如图2所示,可以看出不是一个标准椭球,圆心有一定的偏移,是一个有偏角的椭球体。图3为旋转过程中分别在X OZ,YO Z,X O Y平面上的投影,可以看出是一个椭球体。
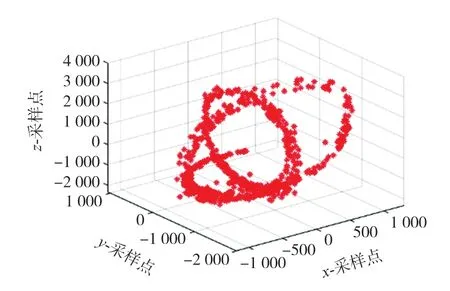
图2 采集到的实验数据
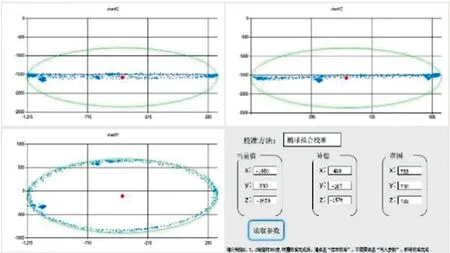
图3 三个平面上的投影
对所采集到的数据进行多次椭球拟合,最终结果相对误差在0.03%左右,拟合之后的椭球如图4所示。
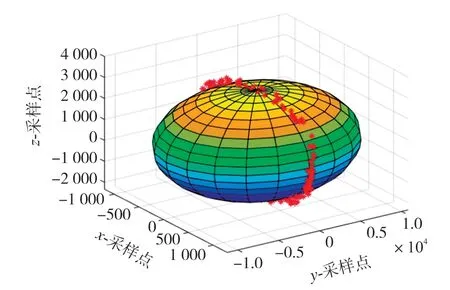
图4 对采集数据进行椭球拟合
对拟合的椭球进行参数求解,按照上述方法进行校准,校准之后的结果为球体。如图5所示。
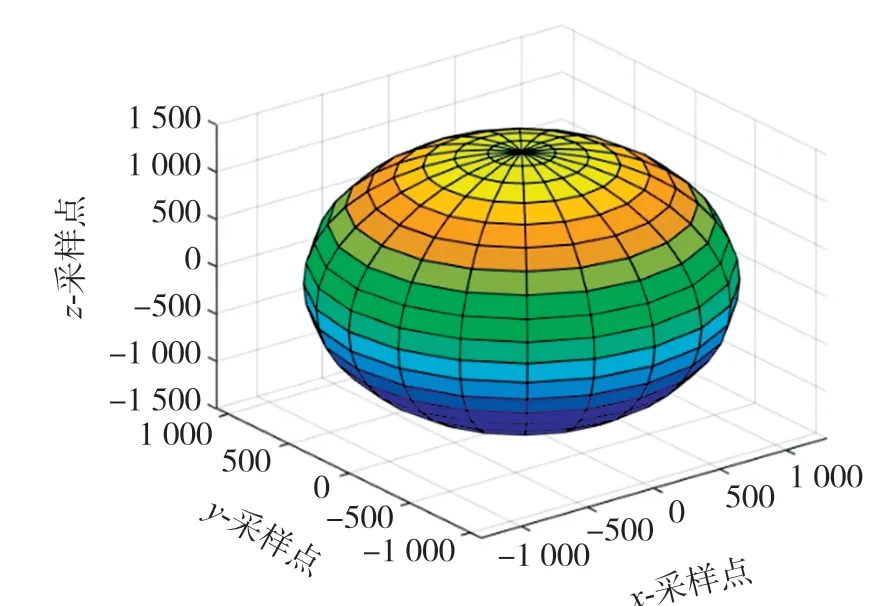
图5 校准结果
校准之前磁传感器测量的地磁场强度与校准后的磁场强度相比如图6所示,由于自身误差,环境干扰等因素,磁场强度波动先是非常大,之后波动变小,通过校正之后,磁场强度近似为一条直线,校准后的磁场强度为2.690 529×106nT,与用标准磁传感器测得的标准值相比均方根误差小于80 nT。通过此校准方法,能够对地磁传感器进行有效的校准,以达到准确测量的目的。
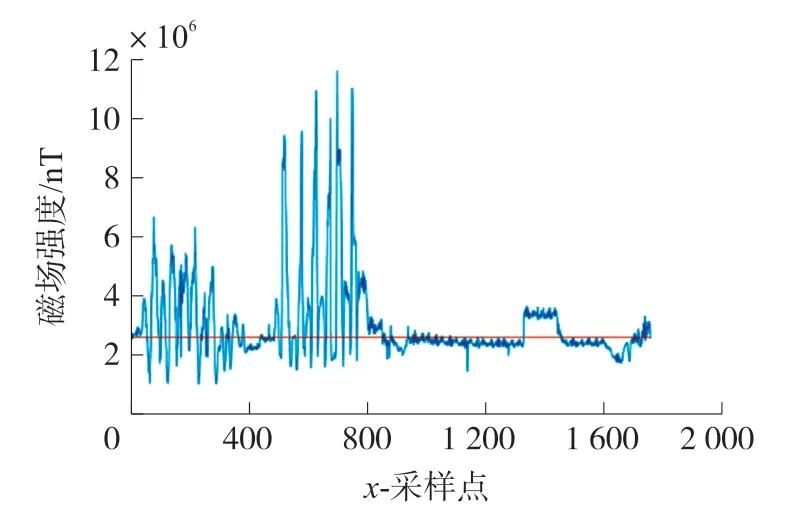
图6 校准后磁场强度对比结果
4 结论
为了消除影响地磁传感器的误差因素,例如三轴非正交误差,灵敏度因子,零位漂移等,使用拟合椭球的集成校准方法,摒弃以往采用方程式对比,利用拟合椭球的自身数学性质进行校准,通过实际实验,得到的结果显示与标准值相比均方根误差小于80 nT。本文只考虑单个地磁传感器的校准,并未考虑磁传感器阵列,下一步将对磁传感器阵列进行传感器中心错位以及传感器轴间指向偏差校准,并进行进一步的分析和研究。
