基于视觉伺服的巡检机器人返航路径确定方法
2022-03-24王兴涛唐永成李文永
王兴涛,唐永成,李文永
(华能新疆吉木萨尔发电有限公司,新疆 昌吉 831799)
0 引言
近几年,随着科技水平的不断进步,机械与电子技术的发展速度加快。机器人作为机械与电子领域的代表发展迅速,影响广泛,受到人们的欢迎[1]。其中巡检机器人依靠其自身自动化和智能化特性被广泛应用于各类高端领域。巡检机器人在完成巡检任务后会自动返航,由于其长时间的工作,在返航过程中可能会出现不同程度的问题,所以需要针对巡检机器人的返航过程,制定精准的路径规划,成为机器人领域亟需解决的问题之一[2]。
文献[3]提出基于初始路径封闭区域的机器人路径规划算法。该方法在选取路径时,未能对机器人参数进行整定处理,所以该方法的迭代次数高。文献[4]提出一种基于量子风驱动优化算法的移动机器人路径规划方法。该方法在进行障碍物确定时存在一些误差,所以该方法选取路径与实际轨迹之间的误差大。文献[5]提出基于A*算法和人工势场法的移动机器人路径规划方法。该方法在调节步长时存在一定问题,所以该方法的避障效果差。
为解决上述巡检机器人返航路径确认时存在的问题,本文提出基于视觉伺服的巡检机器人返航路径确定方法。
1 伺服控制
1.1 离散化处理


(1)

基于巡检机器人自身的视觉伺服系统,需要对机器人的运动速度进行离散化处理[7]。过程为
(2)
f*(k)为离散化的机器人速度矢量;f(k)为巡检机器人在k时刻手爪在坐标中的目标位置矢量;x,y,z分别为位置变量;u(k)为巡检机器人的当前运动矢量。基于上述的离散化处理,规避未知扰动ξ带来的影响。
当目标进行二维的平面运动时uz为0,基于运动速度的离散形式以及非线性的误差反馈,构建巡检机器人的非线性函数,过程为
(3)
f(e,α,δ)为构建的非线性函数;e为输入信号;α为[0,1]之间的常数;δ巡检机器人的滤波因子。
依据上述的非线性函数,利用跟踪微分器对巡检机器人的期望图像位置f*进行追踪。微分器在中间起到过渡作用,图像的矩阵估计值可通过微分器,将机器人的位置在坐标系中很好地表现出来。
1.2 参数整定
基于上述构建的非线性函数,利用自适应免疫算法对巡检机器人的参数进行整定[8]。过程如下:
a.根据自适应免疫算法在巡检机器人参数中随机生成n个个体,通过整合组成初始群体Ak。
b.基于确定的初始群体,针对巡检机器人的各类参数,依据具体的控制要求,构建最优指标函数J,设定取值范围为F=1/J。
c.设定巡检机器人参数中自适应调整比例为s,扩展半径为r1,参数的突变半径为r2,对参数生成的种群进行多样度的确定。
d.在种群Ak中进行选择操作,选出具有int(s×n)个最高评价值的新群体Bk,过程中需将选择比例s控制在[0,1]的范围内。
e.将新获取的群体Bk进行扩展,通过群体Bk扩展出若干新的参数个体,这时int(s×n)中的n为新的个体数量,对新的参数个体数量进行规整化处理,组成新的种群Ck。新种群中个体数目与评价值之间呈正比趋势。
f.将Ck中评价最高的参数保留,通过扩展和突变生成下一代群体Ak+1。
g.通过获取的下一代种群,完成对巡检机器人的参数整定。结束流程。

(4)
i,j分别为不同的非0整数;vik为第i个个体在k时刻的位置;vjk为第j个个体在k时刻的位置。将获取的个体平均距离作为种群中多样度H(n),对种群中的拓展半径、突变半径以及选择比例进行适当调整,过程为
(5)
(a0,b0)、(a1,b1)和(a2,b2)均为参数的对应调整范围。基于上述流程,实现巡检机器人的参数整定,完成伺服控制。
2 返航路径确定
以上述整定的巡检机器人参数为基础,对巡检机器人的全局路径和局部路径进行规划处理,从而实现巡检机器人返航的路径确定[9]。
2.1 规划全局路径
巡检机器人在巡检环境中,可能存在大量的障碍物,因此,巡检机器人在完成巡检任务后,正确规避出一条安全地返航路径,安全地回到出发点是巡检回航的重中之重。过程中,需要对巡检机器人进行必要的路径跟踪控制,在巡检机器人追踪目标坐标时,要利用概率路径搜索方法,基于全局的路径规划寻找出一条安全的最优路径。
首先通过计算机仿真技术,模拟出工作环境的栅格地图。以巡检机器人为中心,巡检机器人所在的栅格设定为x,并将其视为当前栅格;当前栅格周边的相邻栅格集合为V,集合中的任意节点用v进行表示,具体结构如图1所示。
设定3个评价指标mn(x,v)、σ(i)以及δ(i)对搜寻路径的好坏程度进行评价,mn(x,v)为栅格x与栅格v之间的关联程度,n为关联系数;σ(i)为相邻栅格v评价因子;δ(i)为当前栅格与目标栅格之间的中心距离。当栅格x与v之间被封闭时,mn(x,v)直接为0;若否,则mn(x,v)>0,且为常数。

图1 栅格路径搜索结构
依据图1可知,相邻栅格与目标栅格之间的距离越近,σ(i)就越大;若二者差距越大,则σ(i)值越小。图1中阴影部分为障碍物。在路径的搜索过程中,需要优先对距离相对较短的路径进行选取。与当前栅格之间的中心距离越近,则δ(i)值越大,最佳的临街栅格选取的概率为
(6)
jv为相邻栅格中的任意节点;jk为当前时刻的任意节点。
首先对当前栅格周围的相邻栅格P(x,v)值进行确定,并在P(x,v)中寻找最大的目标点l作为起始栅格xl的子目标点。再对xl与x之间的关联程度进行调整,增大路径通过xl的概率,利用正反馈机制,寻找最优路径。最后将xl作为巡检机器人的起始栅格,获取一条全局的最优路径[10]。
2.2 局部路径规划
以上述的全局规划路径为基础,为了让巡检机器人更好地躲避各方障碍,需对局部路径进行适当规划,从而选出最佳的返航路径。
设定(x,ω)为巡检机器人在坐标中的线速度与角速度,通过模型推导出一定时间内巡检机器人的运动轨迹,模型为
(7)
xt+1、yt+1、θt+1以及(xt,yt,θt)为t+1与t时刻巡检机器人在世界坐标系中的位置坐标。
在速度空间(v,ω)中,存在大量的速度组合,依据巡检机器人自身的限制控制采样速度,过程为
(8)
β为最大的角加速度;vc和ωc为将当前位置的角速度与线速度,c为空间系数;α为最大线加速度。
依据上述获取的速度组,构建路径的评价函数,过程为
G(v,ω)=σ(β·h(v,ω)+
γ·d(v,ω)+φ·v(v,ω))
(9)
d(v,ω)为速度空间(v,ω)对应路径距离障碍物最近的距离;h(v,ω)为机器人朝向与目标之间的夹角;v(v,ω)为速度大小的评价函数;σ、γ和φ分别为评价函数中的系数。
在进行全局以及局部的路径规划后,巡检机器人会依照相对合适的路径和速度,移动到追踪路径的坐标周围。通过对位置的当前感知局部地图与目标路径进行匹配,获取障碍物之间的位置关系,从而寻找出最佳路径,并控制巡检机器人到达目标点。通过上述过程,实现对巡检机器人返航的路径确定。
3 仿真实验分析
为了验证上述巡检机器人返航路径确定方法的整体有效性,需要对此方法进行测试。
分别采用基于视觉伺服的巡检机器人返航路径确定方法(本文方法)、基于初始路径封闭区域的机器人路径规划算法(方法1)和一种基于量子风驱动优化算法的移动机器人路径规划(方法2)进行测试。
a.模拟构建一套复杂的巡检环境,并操作巡检机器人进行巡检作业,对本文方法、方法1和方法2确定返航路径时的迭代次数进行测试,测试结果如图2所示。
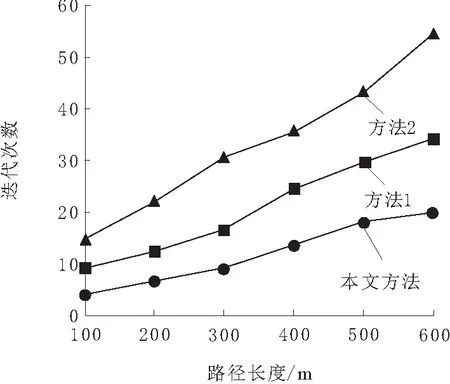
图2 不同方法确定路径的迭代次数测试结果
依据图2可知,确定的路径越长,迭代的次数就越多。方法1的迭代次数要高于本文方法,但是对比方法2来看,要低于方法2。方法2的迭代次数是3种方法中最高的。本文方法在路径确定时的迭代次数要远低于方法1和方法2。综上所述,本文方法在进行巡检机器人返航路径确认时的迭代次数少。
b.基于巡检环境,生成一个二维坐标,对本文方法、方法1和方法2选取路径与实际路径进行对比测试,测试结果如图3所示。

图3 不同路径与实际轨迹之间的误差检测结果
分析图3可知,本文方法选定的路径与实际轨迹相接近,而方法1选定的路径和方法2选定的路径与实际轨迹之间误差较大,且方法2所选路径的误差要大于方法1。这主要是因为本文方法在进行路径选定前,对巡检机器人的参数进行了整定处理,所以本文方法选定的返航路径与实际轨迹之间的误差小。
c.以上述2个实验结果为基础,对返航路径全局规划前后的路径避障效果进行检测,测试结果如表1所示。

表1 规划全局路径前后的路径避障效果
依据表1可知,经过全局路径规划后的路径长度要低于全局规划前,躲避障碍的概率也比规划前高出3.5%。由此可知,利用本文方法选定的巡检机器人返航路径的避障效果好。
d.基于上述的实验结果,对本文方法、方法1和方法2在不同环境下的路径长度进行测试,测试结果如图4~图5所示。

图4 环境1中不同方法搜索的路长度测试结果
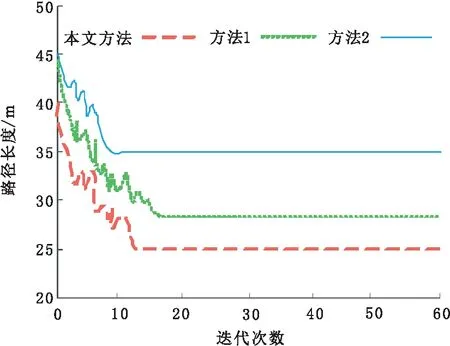
图5 环境2中不同方法搜索的路长度测试结果
依据图4~图5可知,在测试初期,路径搜索过程出现一定的波动,但是随着波动的不断变化,路径越来越短。在路径搜索的后期,由于随机路径的缩减,最优路径趋于平缓状态。本文方法在确定返航路径时搜索的路径长度要低于其他2种方法。
4 结束语
近年来,随着机器人领域的飞速发展,在一些特定领域内,机器人可以代替人工进行一些必要的工作。巡检机器人作为工作机器人的一种,如何在巡检完成后,快速返航,成为机器人领域急需解决的问题之一。针对传统返航路径确定过程中存在的问题,提出基于视觉伺服的巡检机器人返航路径确定方法。该方法首先针对机器人的移动速度对采集的速度组进行离散化处理,实现机器人的参数整定;再基于概率路径搜索方法对全局以及局部的路径进行规划处理,从而确定巡检机器人的返航路径。该方法在离散化速度组时存在一定问题,今后会针对该漏洞继续优化该方法。
