电力线图像检测方法研究
2022-03-24闫佳文陈长金蒋春悦耿立卓
刘 哲,闫佳文,陈长金,蒋春悦,耿立卓,安 会
(1.国网河北省电力有限公司培训中心,河北 石家庄 050031;2.石家庄邮电职业技术学院,河北 石家庄 050021)
0 引言
近年来,无人机(unmanned aerial vehicles,UAV)广泛用于工业发展的各个领域[1-3]。装载有光学传感器(如光谱摄像机)的轻型无人机为电力线检查提供了更有效的选择,它们效率更高、成本更低、更安全且耗电更少[4-5]。使用无人机进行电力线检测的精度可以达到甚至超过使用昂贵的有人直升机进行电力线检测的精度。使用无人机的方式进行电力巡检可以在一定程度上解决人工巡检的众多问题,但是在无人机获取图像之后由人工方式进行排查会增加人力物力的消耗,同时也会降低工作正确率与工作效率[6-7]。随着机器学习的逐渐发展,一些机器学习方法实现了对图像的自动识别和处理,大大提升了电力巡检工作中的工作效率[8-10]。
本文通过谱空间方法来进行电力线检测,除了采用k-means的聚类方法外[11],还采用了期望最大化(expectation maximization, EM)的聚类方法[12]。本文使用Davies-Bouldin指数(davies bouldin index, DBI)用于确定聚类的最佳参数k,选择最低Davies-Bouldin指数相对应的k值为最佳参数用于k-means与EM谱聚类方法[13-14]。考虑到电力线的反射特性,本文提出了一种新的电力线集群检测方法,同时,为了改进电力线检测效果,使用了空间分割方法对聚类输出结果进行处理。通过采用采集的9张无人机图像对本文提出的方法进行验证,结果表明,本文提出的谱空间方法能够有效地检测无人机图像中的电力线。
1 模型与方法
本文采用k-means和EM算法用于谱聚类。由于k-means和EM算法是参数化算法,需要聚类数量作为目标聚类数。为此,本文使用DBI方法确定目标数据的聚类数量,其确定的最佳聚类数量被作为先验参数传递给2个谱聚类算法。
1.1 聚类方法
由于低光谱图像的光谱分辨率较低,所以本文分析的目标是图像的RGB数据。对于二分类(电力线和非电力线)来说,仅仅使用光谱判别是不充分的,因此,要进行k-means聚类。k-means聚类算法是聚类算法中最广泛应用的一种算法,易于实现且效率高。k-means聚类的目的是将n个观测值划分为k个聚类。传统的k-means算法通过将含有数据集合{x1,x2,…,xn}划分为k个类簇cj(j=1,2,…,k)。首先,随机选取k个数据点作为k个类簇的初始聚类中心;随后,将集合中剩余的每个数据根据欧氏距离计算其与k个聚类中心的距离,将每个数据都划分到与其距离最近的聚类中心所在的类簇中,形成初始的k个类簇;最后,计算这k个类簇的新聚类中心,然后将所有数据分配到新的聚类中心,迭代若干次后,若聚类中心不再发生变化,则说明数据点已经全部分配到各自所在的类簇,所有数据点将被划分为k类。本研究中的数据是图像中的像素,通过k-means算法聚类后,每个像素都将被分配到一个聚类标签。
EM聚类方法是一种迭代算法,通过最大化“对数联合概率期望”,得到最大似然解。EM算法首先初始化正态母体的分布参数θ,随后根据分布参数θ计算样品分类变量的期望,最大化分布参数的似然函数L(θ)以获得新的分布参数θ,重复以上步骤,当似然函数L(θ)收敛之后即可获得样本的分类情况。与k-means聚类方法不同,EM聚类方法主要通过寻找最优参数来最大化样本似然函数来对样本进行分类。
1.2 DBI指标
k-means聚类算法能自动将数据进行聚类,但k-means算法也具有一定局限性,即聚类目标数目k需要事先确定。本文采用DBI评价指标,通过最小化集群内距离和最大化集群间距离来确定k的最佳值。DBI指数越小,类之间的相似性越低,聚类效果越好,DBI计算公式为
(1)

在数据集上使用不同的聚类数k对数据集进行k-means聚类,并通过DBI指标计算每种聚类数的DBI值,最后选择最小的DBI值对应的k值作为最佳聚类数,并用作k-means和EM聚类的参数。
1.3 电力线集群检测
在应用k-means或EM算法后,图像被聚类为k类,本文需要将k个类簇聚集成2个聚类(即电力线和非电力线物体)。本文利用电力线的光谱反射特性提出了一种电力线集群检测方法。
本文的集群检测方法中,考虑图像中所有像素的样本空间S,假设DBI计算得出的最优簇数为k,图像被聚类为k个类簇,为c1,c2,c3,…,ck。具有最大RGB值的类簇使用以下等式确定:
(2)
i=1,2,…,k;类簇Cmax对应的RGB值分别为Rmax、Gmax、Bmax。在电力线图像中,这些最大的RGB值是天空的像素值。
电力线由于其金属成分的特点,具有较高的反射值。电力线在天空中看起来非常明亮,其RGB像素值很高,但低于天空的RGB值(Cmax)。电力线的这一特性被用来提取包含电力线像素的集群,电力线集群类簇Cp由以下公式确定:
(3)
i=1,2,…,k(i≠Cmax);d为类簇RGB值的范数。
对于图像中的每个类簇,检测其类簇是否对应于Cp,只有包含电力线的类簇(即Cp类簇)被指定为红色。如果当前类簇不属于Cp簇,则查找该像素的R、G、B值与非Cp簇的相应R、G、B值之间的差异,当差值小于特定阈值(本文中,根据经验设置为10),则为该像素指定蓝色。经过此处理后,所有的像素点将被分为2类,一类包含电力线,另一类不包含电力线。这种聚集技术可以推广到没有天空的图像中,如果图像中不包含天空,则包含电力线的类簇的RGB值将最高,在这种情况下,接近电力线RGB值的道路和云在使用该聚集方法后也将被保留在包含电力线的同一簇中。因此,为了降低误分类,本文采用了空间分割方法对聚类后的输出结果进行了处理。
2 结果分析
本文采用了在不同角度和高度采集的9张无人机图像对本文提出的方法进行验证。为了使用DBI获得最佳聚类数,通过使用不同的k值进行聚类。所有9张无人机图像的DBI指数如表1所示,DBI的最小值对应于当前图像的最佳聚类簇数。

表1 无人机图像的DBI指数
k-means聚类使用DBI得出的聚类数,如表1所示,图像1~图像9的聚类数分别取其DBI最小值对应的k值。由于本文的目标是二分类问题,因此首先使用k-means和EM聚类方法对图像1~图像9在不同k值情况下进行了聚类,随后使用空间分割方法对图像进行处理。图1与图2分别展示了k为3、4和5时分别k-means和EM聚类方法输出图像的聚类正确率。

图1 k-means聚类方法的聚类正确率
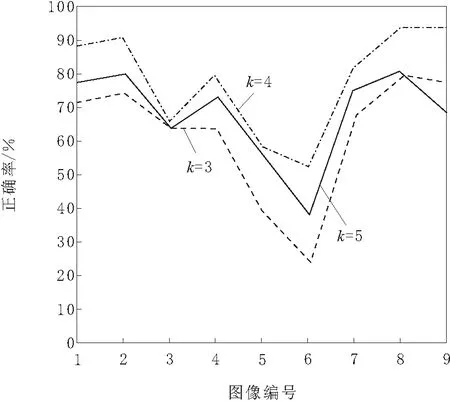
图2 EM聚类方法的聚类正确率
从图1和图2可以看出,对于k值为3、4和5时,在使用k-means的情况下,图像3的正确率分别为46.3、78.1和65.3;对于k值为3、4和5,在使用EM的情况下,图像3的正确率分别为63.2、66.7和63.1。可以看出,在使用k-means和使用EM聚类方法时,图像3的k值为4时聚类效果更好。从图1和图2可以观察到,当使用从DBI导出的k值时,性能良好。这是由于通过增加或减少类簇的数量,可以把电力线、土壤、天空或塔架等其他物体分成相同或不同的簇。随着类簇数量的增加或减少,更多的电力线像素将进入其他类簇,导致无法正确检测到电力线的像素点。因此,选择使用DBI确定的类簇能够提升电力线的检测效果。
进一步比较k-means和EM的分类正确率,可以观察到在大多数图像中,在使用相同DBI确定的k值的情况下,EM的聚类正确率比k-means的聚类正确率更高。因此,使用EM作为聚类算法比k-means聚类算法具有更好的性能。
3 结束语
本文使用了k-means和EM这2种谱聚类方法对无人机图像中的电力线进行检测。首先,通过计算DBI以找到最佳的聚类数量,随后将DBI的输出作为k-means和EM的聚类参数进行聚类分析,同时对DBI所给出的k值以外的值进行聚类。本文提出的方法能够将聚类后的图像划分为电力线和非电力线2部分。但是由于图像的光谱分辨率较低(RGB波段),与背景像素有光谱相似性的电力线像素被聚类为电力线,本文通过使用空间分割方法对聚类的输出图像进行处理以降低这种错误分类。通过结合空间分割方法与k-means和EM聚类方法获得的图像叠加于参考数据中,并使用正确率来衡量其性能。
为了验证本文提出方法的有效性,采用了在不同角度和高度采集的9张无人机图像对本文提出的方法进行验证。对k-means和EM这2种谱空间方法输出结果进行比较,结果证明EM聚类方法优于k-means聚类方法。同时,仿真结果表明本文提出的方法可以排除噪声区域图像、准确识别出无人机图像中的电力线。
