多传感器融合的轨道炮轨道直线度测量方法
2022-03-23刘志耀狄长安朱新成
刘志耀, 狄长安, 朱新成
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引 言
轨道炮轨道直线度变化直接影响轨道炮发射性能[1],目前国内大多采用量规法进行检测。量规法操作简单、易于实现,但测量精度低,且只能定性判断直线度误差,无法得到具体的数值[2]。半导体激光器和位置敏感探测器(position sensitive detector,PSD)的出现,为激光准直直线度测量设备的研发提供了强有力的技术保障,其响应速度快、精度高等优点,可用于非接触式直线度测量[3]。传统火炮身管直线度测量没有考虑身管间距变化对直线度的影响。
本文提出一种多传感器融合的轨道炮轨道直线度测量方法,可以准确测量轨道任意长度的直线度。
1 测量原理
轨道炮的轨道截面为下凸形的异形结构,如图1所示,截面的中心点为上下弧面连线与左右两侧中分线的交点。轨道炮轨道直线度为轨道实际轴线与理论轴线之间的距离,如图2所示轨道实际轴线为轨道各截面中心点的连线,而理论轴线为轨道首、末截面中心点的连线[4,5]。

图1 轨道炮轨道截面
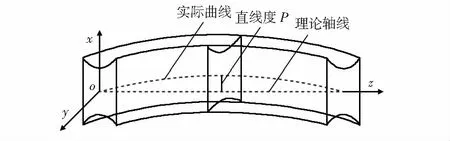
图2 轨道直线度示意
图2中以轨道末端检测面中心作为坐标原点,以轨道的理论轴线作为z轴,建立空间直角坐标系O-xyz,则轨道实际轴线上的点可以用x,y,z坐标来表示。而在测量系统中测量所建立的直角坐标系中z1轴为激光光束所在的直线,如图3所示,测量系统得到的坐标值为以激光光束为z1坐标的坐标系中,故需要将此坐标值转换到以身管轴线为z轴的坐标系中,同时融合轨道间距计算直线度。

图3 激光光束与理论夹角示意
图3中M点为激光光束在PSD上的能量中心点,M′为轨道口的几何中心,Z′轴为激光光束所在的直线,OM为激光器出射点到轨道口PSD的直线距离,MM′为PSD激光能量中心距轨道中心的距离。由于轨道中不同截面在竖直方向上的间距不一样,测量装置的下表面与轨道的下表面贴合, PSD竖直方向输出量只能反映轨道下轴线的偏移量,融合轨道上下间距,设测量系统测到的一组数据为(l,x,y,r)。其中,l为激光测距传感器输出,mm;x,y为PSD二维偏移量输出,mm;r为电感传感器测间距输出,mm。可以得轨道中轴线点在竖直方向的偏移量为
x=(x+r/2)
(1)
测量时,首先将PSD放置在轨道两端口,检测到两组坐标和间距值(l0,x0,y0,r0)和(l,x,y,r),便可通过计算得到激光光束与轨道理论轴线之间的夹角β。在三角形O1MM′中由于MM′≪O1M,所以
(2)
(3)
轨道炮的发射轨道弯曲状态都是由完好的状态朝着向下偏左或是偏右的方向弯曲。将轨道弯曲的实际轴线看作是一条平滑的弧线,并假设该弧面在一个平面内,在实际情况下该弧线可能不在同一个平面,但这并不影响直线度的值,可以将轨道不弯曲时所在的直线看作是轨道弯曲时平滑弧线的切线[6],则任意截面处直线度计算示意如图4所示。

图4 直线度分析
设测量系统的测量值为(li,xi,yi,ri),在任意截面处
(4)

(5)

(6)
由轨道直线度定义可知,在该截面处的直线度为
(7)
2 测量系统设计
通过以上分析,测量系统主要测量对象:PSD所处轨道深度、PSD测点处轨道间距、PSD二维偏移数据。
如图5所示,测量系统工作时调整放置在轨道一端的移动测量平台,使准直激光光束和激光测距传感器光束于身管轴线相对平行;将测量单元(包含内膛测量适配部件、电感传感器和PSD接收器)从轨道另一端放入内膛;利用推杆推动测量单元在轨道内移动;移动过程中,激光测距传感器可获得测量单元的相对位移,电感传感器可测量轨道长度方向各位置的间距,准直激光光束在PSD上投影的二维坐标变化。最后利用数据储存处理终端中的专用处理软件来实现对测量数据的评定。

图5 测量系统工作原理
3 实验结果与分析
针对30 mm口径轨道炮进行轨道直线度测量,测量结果如图6、图7所示。

图6 水平方向直线度
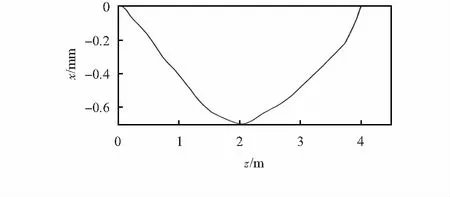
图7 竖直方向直线度
随后进行的5次直线度测量结果表明在x方向最大直线度的最大值与最小值之差为0.024 mm,在y方向最大直线度的最大值与最小值之差为0.019 mm。测量误差的主要来源为电感传感器测量误差,PSD测量误差,PSD传感器安装误差。电感传感器的测量精度为0.002 mm,PSD的测量精度优于0.005 mm,PSD传感器安装误差属于系统误差,可达到0.02 mm。试验证明测量系统的精度可控制在0.03 mm。
直线度误差测量在获得采样数据后,必须按一定的方法评定直线度误差。其中最通用的方法是两端点连线法[7],两端点连线评定的最大直线度为
pmax=2dmax
(8)
式中dmax为测量点到两端点连线lAB距离的最大值。轨道直线度误差属于在任意方向的直线度误差,可以分解到任意两个相互垂直的平面上。对30 mm轨道炮测量数据进行两端点连线法直线度误差评定,得到
(9)
4 结 论
本文提出的多传感器融合的轨道炮轨道直线度测量方法,修正了因轨道间距变化引起的直线度测量误差。并以此研究设计的直线度测量系统,对30 mm轨道炮进行检测,测量精度为0.03 mm以内。有良好的应用和推广意义。
