自然驾驶条件下驾驶员换道行为的识别与分析
2022-03-23刘凯文
张 策,韩 愈,刘凯文,王 丹,林 业
(天津科技大学 机械工程学院, 天津 300222)
换道是汽车行驶过程中常见的驾驶行为之一,在换道过程中,对交通环境的感知及对车辆的控制都比其他驾驶行为更加复杂,危险性也更高[1-2]。美国高速公路安全管理局(national highwaytraffic safety administration)对近年来发生的交通事故进行统计分析后发现,有约27%的事故是由车辆换道造成的,而且这其中又有90%以上是由于驾驶员对周围环境观测不足造成的[3]。我国大型实车路试试验也有相似的结论:在近年来交通事故中,有23.91%是由于换道引起的[4]。随着搭载自动驾驶技术的智能汽车逐步推广,能够大幅减少因错误驾驶行为引起的交通事故。基于反映真实换道行为特征的自然驾驶数据,可以为智能汽车提供正确评估换道场景潜在风险的能力,选择安全舒适的策略,减少换道引起的交通事故,对提高道路行车安全具有重要意义。
目前主要有两种获取高速公路换道行为数据的方式[5]:一是视频拍摄,美国的NGSIM(next generation simulation)数据集[6]从高层建筑捕获中,以鸟瞰的视角捕获了高速公路和城市交通道路上的车辆轨迹,是一组公开的微观交通数据,广泛用于驾驶员行为的研究;德国的highD数据集[7]使用配备有摄像模式的无人机来记录德国高速公路上的交通情况,定位误差通常小于10 cm,其中包括了5 600条完整的变道记录;传统的视频获取方法主要是基于路侧视频进行拍摄,但由于高度有限,有效拍摄范围较短,而且后期的数据处理也面临较大挑战。二是自然驾驶,相比于视频拍摄能够获得全面的驾驶行为数据,美国SHRP2(the strategic highway research program 2)[8]采集了36 000条正常驾驶、接近碰撞及碰撞的自然驾驶数据;国内同济大学基于China-FOT[9]项目收集了近60名驾驶人的行为数据,总里程129 109 km。但换道行为受天气、道路类型、交通量等因素影响,仅仅基于现有数据集的分析是远远不够的,针对中国高速公路条件下的换道行为特性研究仍需要大量开展。
本文针对高速公路场景下的换道行为展开研究。首先,使用标准自然驾驶数据处理流程,对高速公路驾驶数据进行采集处理,获取每辆车连续的运行状态数据;然后,搭建支持向量机模型对换道行为进行识别;最后,提取换道行为轨迹与相关车辆,对换道行为的时间长度、空间长度以及周边车辆的相互状态等特征参数进行深入分析。
1 自然驾驶数据准备
自然驾驶数据处理流程主要分为采集、清洗、目标标注、场景标注、场景聚类、入库。驾驶场景数据采集主要采用激光雷达、毫米波雷达、多位置多角度摄像头、定位设备、本车can线信息等多传感器,采集车辆与传感器布置如图1所示。
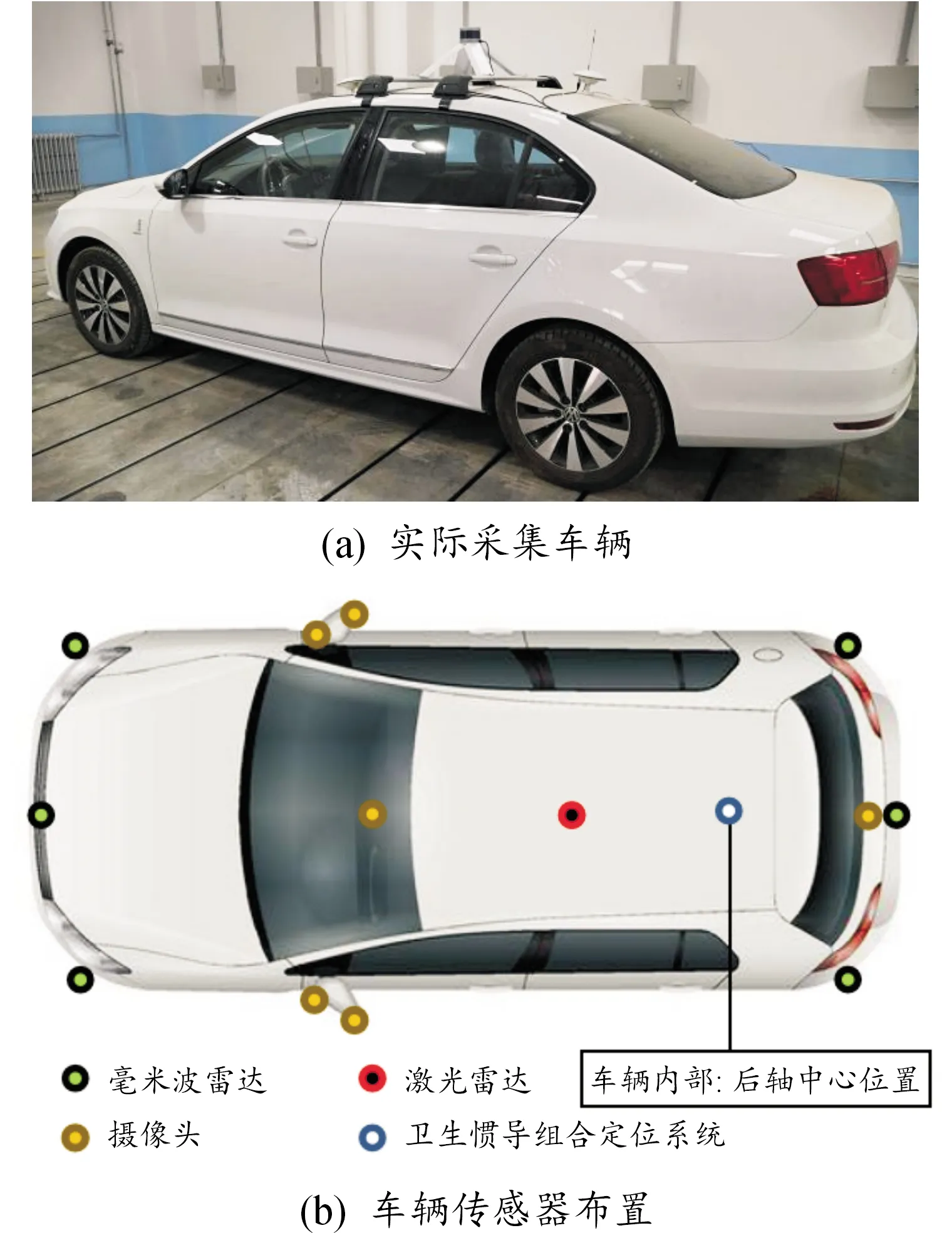
图1 实际采集车辆与传感器布置示意图
驾驶场景数据传输回来后,先对采集数据进行清洗,去掉错误的和遗漏的数据;然后,对采集到的场景视频图片数据、激光雷达点云数据进行目标类型、位置等信息标注;驾驶场景标目标注后形成时间序列数据,结合视频对场景特征进行标注。本文标注工作在ASEVA软件中完成,图2为标注过程中的视频回放示例。

图2 ASEVA标注过程中的视频回放示例
接下来,按照场景体系将场景基元前后组合成驾驶场景,根据不同测试目的列入不同功能场景的场景库;最后,将场景聚类数据转化为场景标准格式,伴随原始数据和标注数据存入场景数据库,并实现快速检索。
为了便于高速公路场景下的换道数据研究,作3点说明:① 不考虑高速公路出入口、大曲率弯道及连续换道场景;② 不考虑极端天气;③ 不考虑传感器误差。
另外,本文数据标注采用九宫格原则,只考虑本车周围的车辆,标注的前后标注距离为100 m,标注原则如图3所示,其中Ego代表主车,Veh1~Veh8代表周围场景车辆。

图3 数据标注原则示意图
最终得到自然驾驶数据格式,如表1所示。

表1 自然驾驶数据格式
2 换道行为分析及提取
2.1 换道行为分析
由于换道不是在一瞬间完成的,而是一个持续性的过程,因此,不能仅凭瞬时的行驶数据进行换道状态识别,应该选取一段时间内的行驶轨迹数据来作为换道状态识别的样本。换道行驶轨迹样本确定方法如下:
首先通过车辆车道ID变化情况确定换道车辆的车道变化点,即车辆中心跨过车道线的时间点t。由于绝大多数车辆的换道行为都会在10 s内完成,本文数据采集频率为25 Hz,采样时间为0.04 s,因此截取车道变化点t前后175个时间点共计250个时间点的车辆轨迹数据,计算此段时间内车辆的航向角,以采集入库的数据中某辆车的行驶数据为例,车道变化点前后共10 s内的航向角变化趋势如图4所示。
航向角开始发生明显且稳定变化的时间点可以被认定为换道起始点,因此定义若[t-175,t+175]中从某点tstrat开始,连续5个采样点的航向角都大于阈值1.6°,则此点为换道起始点,同理可确定换道结束点tend,如图5所示。

图4 车辆换道过程航向角变化
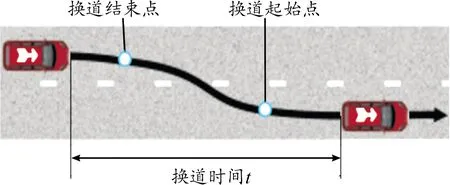
图5 换道过程起始点和结束点示意图
2.2 换道数据提取
车辆Ego在换道过程中,需要优先考虑与同车道前车Veh-f、目标车道前车Veh-ft、目标车道后车Veh-rt之间的速度、距离,如图6所示。

图6 典型换道场景
因此,提取这4辆车的行驶数据,包括车辆ID、绝对速度、相对速度、相对位移、位置坐标、车道ID等相关信息作为换道的特征参数。经过数据预处理,最终获得5 237条样本数据,其中包括3 480条换道数据和1 757条车道保持数据。
2.3 数据平滑处理
对于采集换道场景数据为非线性数据集,线性拟合对数据平滑处理不太理想。因此,本文用多项式拟合和滑动平均法处理非线性数据集。
以随机挑选的一个典型场景的参数组合为例进行分析:Ego车速为110 km/h,Veh-f车速为100 km/h,Veh-ft车速为102 km/h,Veh-rt车速为104 km/h,对换道过程中的相对位移和相对速度3次多项式拟合和滑动平均处理如图7所示。

图7 换道过程中特征参数平滑处理
由图7(a)(c)(e)可以看出,Ego与Veh-f、Veh-ft、Veh-rt相对速度的原始数据波动性较大,使用3次多项式拟合和取间隔n=5为时间窗口进行数据平滑,其中滑动平均法的平滑效果好于3次多项式拟合。由图7(b)(d)(f)可以看出,Ego与Veh-f、Veh-ft、Veh-rt相对位移的原始数据波动性较小,且成一定的线性关系,多项式拟合和取间隔n=5为时间窗口进行数据平滑,效果几乎与原始数据一样。
通过对比3次多项式拟合和滑动平均处理效果,滑动平均法对一定范围内波动性较大的数据更具有适应性,因此,本文采用采用滑动平均法对特征向量去噪。
3 基于SVM的换道行为识别
SVM是一种基于风险结构最小化准则的学习方法,可以解决小样本、非线性和高维模式识别问题,主要用于分类和回归领域[10],已广泛应用于文本分类、生物信息、语音识别、遥感图像分析、故障识别与预测和信息安全等领域。
3.1 模型关键参数确定
根据模型训练经验,将换道决策模型样本数据集中的70%作为训练样本,即3 666条样本数据,剩下的30%作为测试样本,即1 571条样本数据。训练样本中3 666条数据包括2 436条车道变换样本和1 230条车道保持样本;测试样本中1 571条数据包括1 044条车道变换样本和527条车道保持样本。
通过训练模型的核函数,对以下4个核函数分别调取,输入到SVM模型中,分别调取模型的运行时间和模型的准确率,从2个维度综合考虑模型的参数,通过数据的多次迭代获取模型运行时间和准确率,如表2。

表2 不同核函数对应模型运行时长和准确率
由表2对比可知,rbf模型的准确率最高,为94.65%,所以构建SVM换道决策模型的核函数为rbf。
对于高斯径向基核函数rbf,gamma参数很难定义每个参数对支持向量机性能的影响,所以直接使用学习曲线或网格搜索来帮助找到参数的最佳组合。对于高斯径向基核函数rbf,调整gamma方法是绘制学习曲线。
为了确定最佳的gamma参数,选取0~100之间的100个数训练gamma参数,查看在gamma参数变化过程中,模型准确率的取值,由 gamma参数学习曲线(如图8)可以明显看出,随着gamma参数的增长,模型准确率也在增长,当达到gamma参数为2时,模型的准确率达到98.67%,准确率区域平缓,之后随着gamma参数的取值的增长,模型的准确率先下降,然后趋于平缓,到95.33%。因此,选取gamma参数为2。

图8 gamma参数学习曲线
为了确定最佳的C参数,选取0.01~30的50个数训练C参数,查看在C参数变化过程中,模型准确率的取值。由图9所示参数C学习曲线可以看出,随着C参数的增长,模型准确率也在增长,当参数为8.58时,模型的准确率达到98.92%,接着模型随着参数C的增长,准确率区域平缓,因此,最后选取参数C为8.58。
3.2 测试结果
除了使用SVM进行换道行为识别,还使用BP(back propagation)神经网络模型进行对比验证,模型对比的结果如表3所示。
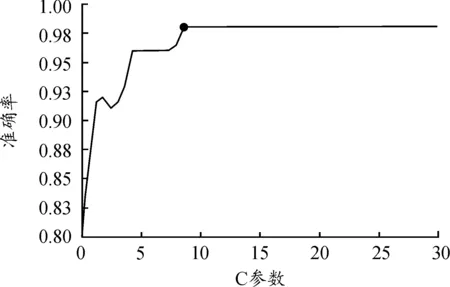
图9 参数C学习曲线
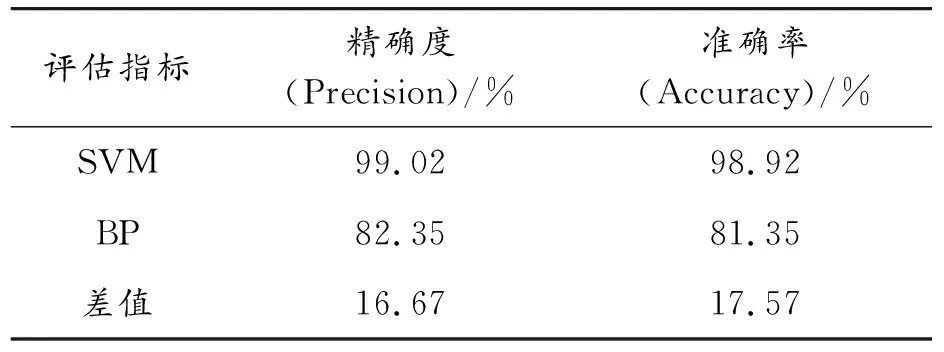
表3 SVM与BP神经网络模型对比测试结果
通过表3可以看出,支持向量机SVM模型相比于BP神经网络模型在精确度上即模型在预测真实换道为1时的准确率提高了16.67%,在模型整个预测值上的准确率提高了17.57%,因此,SVM模型有更好的适应性。
4 换道决策阶段场景影响分析
4.1 换道起始时刻速度分布
在换道起始时刻,观察换道车辆Ego速度的变化,可以为换道过程中换道风险评估模型搭建提供换道车辆速度依据,本车速度的分布如图10所示。
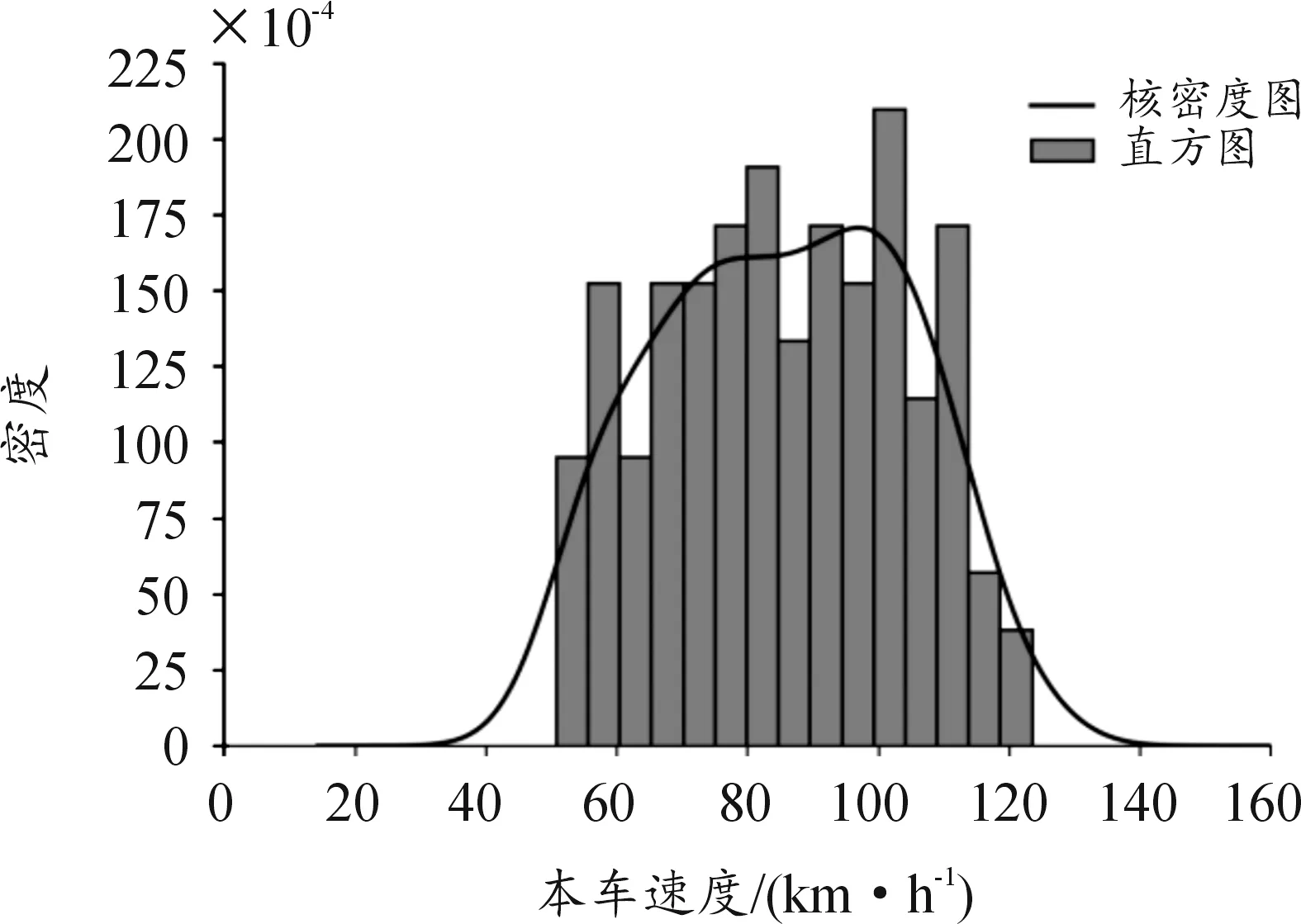
图10 本车换道起始速度分布
通过图10可以看出,车辆换道过程中的本车速度主要集中在95 km/h,其中有几个样本值低于60 km/h,观看采集视频后,这几条数据为车辆驶向应急车道;本车的速度的均值为85.37 km/h,速度的方差为25.89。
4.2 换道起始时刻Ego与Veh-f相对速度和相对位移分布
车辆换道过程中,换道的安全条件取决于本车自身因素和周围场景车辆的相对速度和相对位移。相对速度决定了本车换道过程中的速度变化,相对位移决定了换道过程中最小换道安全距离变化,Ego与Veh-f的相对速度和相对位移分布如图11所示。
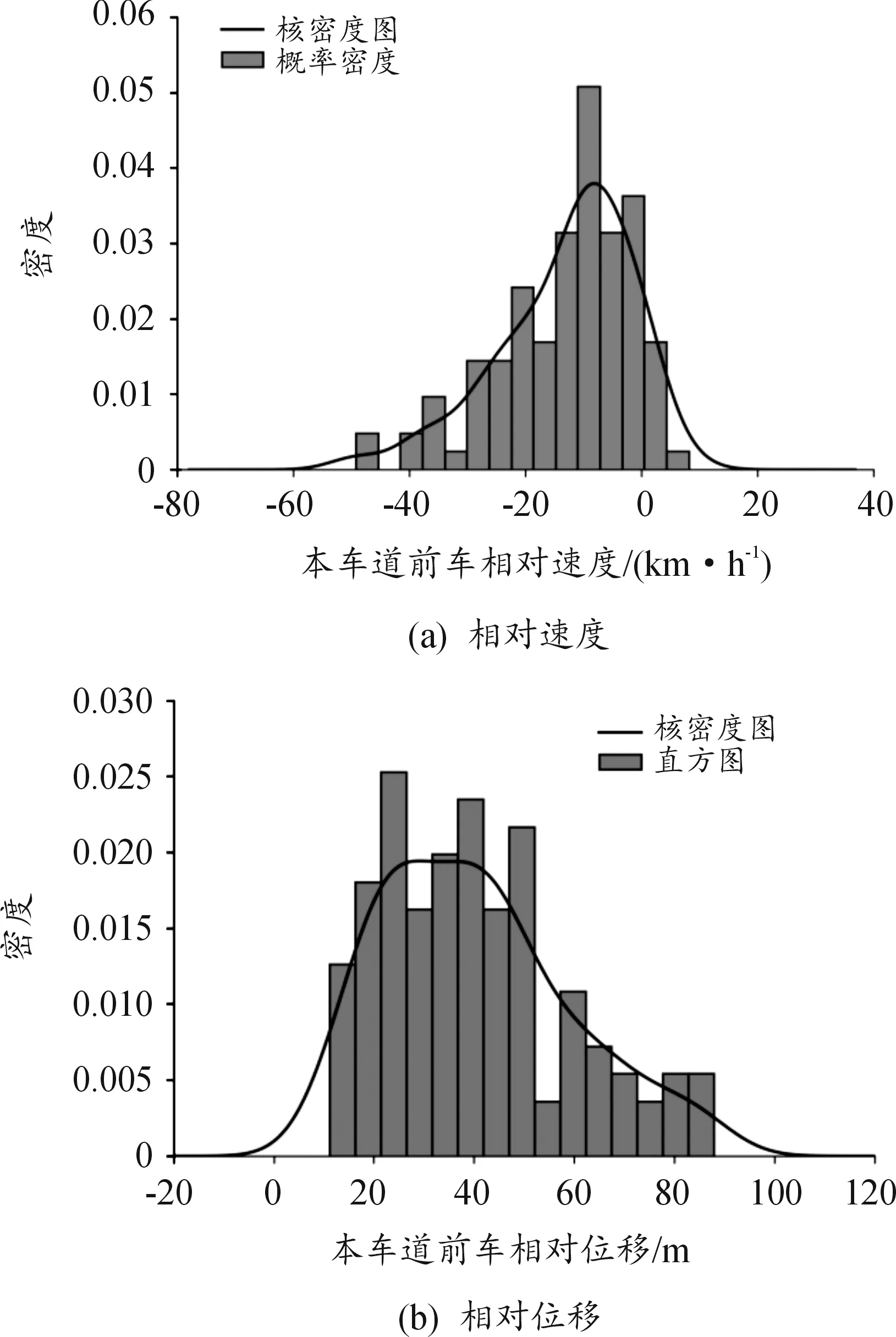
图11 Ego与Veh-f的相对速度和相对位移分布
由图11可以看出,本车道前车Veh-f的相对速度主要分布在-10 km/h,说明本车换道起始时刻前车Veh-f的车速小于本车车速Ego,本车为了达到更理想的行驶条件需要换道超车;本车道前车的相对位移主要分布在33 m处,表明当本车Ego换道起始时刻有一定的安全换道距离。相对速度均值为-13.07 km/h,方差为26.57,相对位移的均值为40.14 m,方差为25.73。
4.3 换道起始时刻Ego与Veh-ft相对速度和相对位移分布
车辆换道过程中,Veh-ft对换道有重要影响,Veh-ft的车速变化影响本车换道速度和时间,Veh-ft车辆起始时刻的车速大于本车Ego的情况下,本车换道更为容易,相反的情况下较难;Veh-ft与本车Ego的相对距离较大时,本车换道更加安全,相反,当两者之间的相对距离较小时,换道过程存在一定危险。Ego与Veh-ft的相对速度和相对位移分布如图12所示。

图12 Ego与Veh-ft的相对速度和相对位移分布
由图12可以看出,目标车道前车Veh-ft的相对速度主要分布在零附近,说明Ego换道起始时刻Veh-ft与Ego车速几乎保持相同,但相对位移主要分布在30 m处。相对速度均值为6.39 km/h,方差为35.53,相对位移的均值为34.73 m,方差为30.94。
4.4 换道起始时刻Ego与Veh-rt相对速度和相对位移分布
车辆换道过程中,Veh-rt对换道也有重要影响,Veh-rt的车速变化影响本车是否继续换道,当Veh-rt的车速小于Ego的车速时,本车可以继续换道,相反当Veh-rt的速度持续大于本车Ego的车速时,本车将提前结束换道;Veh-rt与Ego的相对距离较大时,本车换道更加安全,相反当两者之间的相对距离较小时,换道过程存在一定危险。Ego与Veh-rt的相对速度和相对位移分布如图13所示。
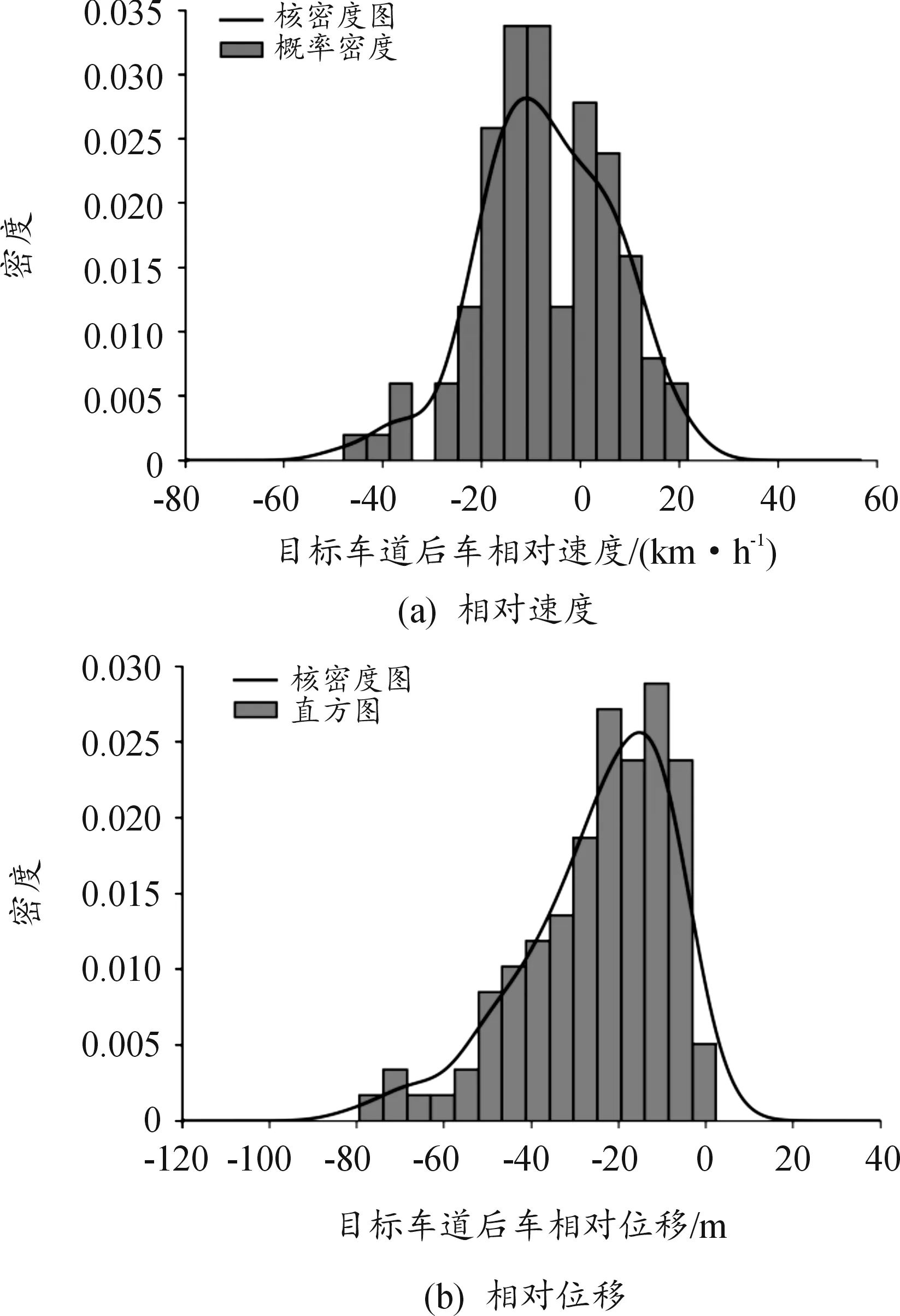
图13 Ego与Veh-rt的相对速度和相对位移分布
由图13可以看出,Veh-rt的相对速度主要分布在-18 km/h,说明Ego换道起始时刻Veh-rt的车速小于Ego车速;Veh-rt的相对位移主要分布在-20 m处(此处的负号只代表方向,表示在本车Ego的后方),表明当本车Ego换道起始时刻有一定的安全换道距离。相对速度均值为-6.97 km/h,方差为24.21,相对位移的均值为-24.85 m,方差为23.35。
通过对本车Ego和本车道前车Veh-f、目标车道前车Veh-ft、目标车道后车Veh-rt、相对速度和相对位移统计分析后,本车Ego换道起始时刻与目标车道前车Veh-ft的相对速度接近于零,并且相对速度和相对位移的方差值大于Veh-rt和Veh-f的方差值,表明本车Ego在换道过程中,目标车道前车Veh-ft对本车换道影响最大,Veh-f和Veh-rt影响次之。
5 结论
1) 采用自然驾驶试验的方法对高速公路驾驶数据进行采集,并使用标准数据处理流程,对采集的车辆轨迹进行处理,获取每辆车连续的运行状态数据。
2) 搭建支持向量机模型对换道行为进行识别,使用学习曲线找到参数的最佳组合,训练后模型的准确率达到98.92%,优于BP神经网络模型。
3) 提取换道行为轨迹与相关车辆,对换道行为的时间长度、空间长度以及周边车辆的相互状态等特征参数进行分析,得出结果:在换道过程中,目标车道前车对本车换道影响最大,本车道前车和目标车道后车影响次之,该结果可为智能汽车的换道功能设计提供参考。
