面向5G远程自动驾驶的CPSS控制系统研究
2022-03-23杨良义邓长祯刘飞洋
杨良义,邓长祯,刘飞洋
(1.汽车噪声震动和安全技术国家重点实验室, 重庆 401122;2.中国汽车工程研究院股份有限公司, 重庆 401122)
信息物理融合系统(cyber physical systems,CPS) 是将信息基元与物理元素融为一体,并基于信息系统和物理系统之间的相互作用与反馈,进而实现对物理系统的精确认知和有效控制的前沿技术。2008年,美国成立的CPS指导小组在《cyber-physical systems executive summary》中,把CPS应用放在交通、国防、能源、医疗、农业和大型建筑等多个领域[1]。CPSS(cyber-physical-social systems)是CPS的延伸,增加了人类社会属性,为解决具备社会属性的复杂问题提供了一种新的方法和手段[2-3]。当前CPSS发展还处在初级阶段,研究的成果有限,缺乏系统性的设计方法[4]。有一些学者认为,CPSS可用于满足个性化需求,如将CPSS应用于展厅为游客提供更好的服务,应用于工业机器人生产线,满足人类对产品个性化需求[5]。有研究将CPSS应用于城市大数据,以期为居民用户提供主动服务[6],也有研究将CPSS应用于智能家居的清洁场景之中[7]。在交通和汽车领域,李克强等[8]提出了车路云一体化融合的智能网联汽车云控系统,探讨了该系统典型特征,设计了车路云融合架构,并研究了边缘云上的车路融合感知与时变时延下车辆控制等技术。王飞跃等[9]基于CPSS考虑车辆、驾驶员和信息之间的交互作用,提出了平行驾驶的概念和框架,用于未来的协同网联式自动驾驶。韩双双等[10]基于CPSS 的平行智能车概念,研究了通过道路和交通设施对环境实现充分感知,实现车辆更高级别智能驾驶的技术。王晓等[11]研究了将基于CPSS智能车辆网联管理与控制方法,并给出了平行车联网的概念、框架、功能与流程。5G具有高带宽、低时延等特点,在5G-V2X的应用场景中,定义了3类V2X服务,其中之一就是支持自动驾驶、远程驾驶、车辆编队等先进V2X服务。针对5G-NR(uu)在车辆远程遥控驾驶方面的应用和5G通信技术对该场景的适用性方面,也有相关技术研究[12]。伴随着5G技术的商业化应用的推广和自动驾驶汽车系统架构的不断演化,延伸出了许多新的5G应用场景。其中5G远程自动驾驶技术就是一个新的典型应用场景,其不仅可以实现在特定场景下的自动驾驶功能,在面对复杂感知、决策或控制问题时,又可以实现人类驾驶员的接管和修正,应用前景广阔。
但是总体来看,关于基于CPSS理念的自动驾驶车辆具体应用场景和工程技术研究相对较少,尤其缺少将CPSS、5G通信技术、自动驾驶技术相结合的工程技术研究和应用实践。针对以上技术现状和问题,本文提出采用CPSS的相关理念和属性,基于5G通信网络、车辆自动驾驶融合感知、智能决策和控制等技术,设计车辆自动驾驶控制系统。将各种道路交通物理对象、车辆状态、驾驶员驾驶等多种多源异构信息要素进行融合,进而实现人和机器共同协同控制自动驾驶车辆。
1 5G远程自动驾驶系统架构
5G远程自动驾驶系统的分层架构如图1所示,可以分为4个功能层级,分别是物理层、网络层、信息层和决策控制层。其中物理层主要包含的是车辆本身及其雷达、摄像等传感器,制动、动力等执行系统,车辆行驶的道路环境及其V2X通信设施、信号灯等设备;网络层主要包含的有可实现远程通信的5G(uu接口)网络终端与基站,可实现车辆与车辆、交通基础通信的LTE-V 2X(PC5接口)网络终端与基站,可实现车辆内部线控的和信息交互的车载CAN/LIN网络;信息层主要包含的有5G远程自动驾驶车辆行驶道路的高精度地图信息、车辆状态信息、道路及交通设施状态信息以及自动驾驶车辆行驶周边的交通参与物状态信息,实现自动驾驶车辆感知信息的融合识别;决策控制层,包含有远程遥控驾驶系统和自动驾驶车辆自主决策控制系统2个部分,在车辆行驶轨迹、状态不符合预期时或需要人工干预车辆运动时,远程遥控驾驶系统可以人工进行干预和修正控制策略。

图1 5G远程自动驾驶系统分层架构
CPSS理论世界主要由3个部分组成,即物理世界、精神世界和人工世界,其基本架构如图2所示[2],3个世界由物理空间和网络空间耦合而成。理论层面,面向CPSS的自动驾驶系统、车联网系统在文献[9-11]中均论述和研究,相关自动驾驶系统的研究更多是从智能交通信息感知层面实现车辆自动驾驶,减少车辆的传感器配置,降低车辆成本。针对车辆自动驾驶这样一个典型应用场景,本文提出了面向5G远程自动驾驶的CPSS控制系统架构,如图3所示。可将各种道路交通物理对象在多种信息要素综合作用下协调运行,并增加了远程驾驶员的主观认知和判断,自动驾驶系统在控制车辆行驶的同时,远程驾驶员可以根据主观判断,随时修正车辆的运行状态。因此,具有CPSS的典型特征,可将真实物理世界、虚拟人工世界及精神世界的各类活动,通过信息空间与物理空间之间的交互融合,形成一个典型的自动驾驶车辆的CPSS空间。

图2 CPSS系统组成
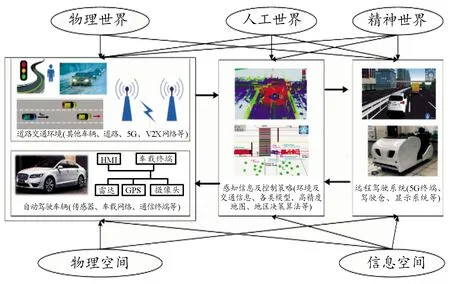
图3 面向5G远程自动驾驶的CPSS控制系统架构
2 5G远程自动驾驶系统架构设计
整个远程自动驾驶系统由道路交通环境、自动驾驶车辆系统、通信组网系统和远端驾驶控制系统4个部分组成。为实现车辆的远程自动驾驶功能,需要对自动驾驶车辆进行重新设计和改造,硬件系统如图4所示,5G远程自动驾驶系统架构如图5所示。道路交通环境包含了道路其他车辆、智能道路交通系统和其他交通参与者。智能道路系统的路侧控制器可以通过路侧摄像头、道路雷达获取道路上的交通参与者状态信息,读取道路标识牌和信号灯状态信息,并通过路侧RSU(road side unit)进行广播,辅助自动驾驶车辆感知道路交通状态。道路车辆可以通过车载OBU(on board unit)广播车辆状态信息,不具备通信功能的普通车辆状态,通过智能道路交通系统或自动驾驶车辆传感器被感知和识别。远端驾驶控制系统主要由驾驶模拟舱、自动驾驶车辆行驶环境及状态显示系统、远端控制系统等组成,用于实现远端驾驶员对自动驾驶车辆的运动状态监测、实时控制和干预。为保证系统的高可靠和低时延,外场车辆与远程控制系统之间通过5G网络实现通信连接。
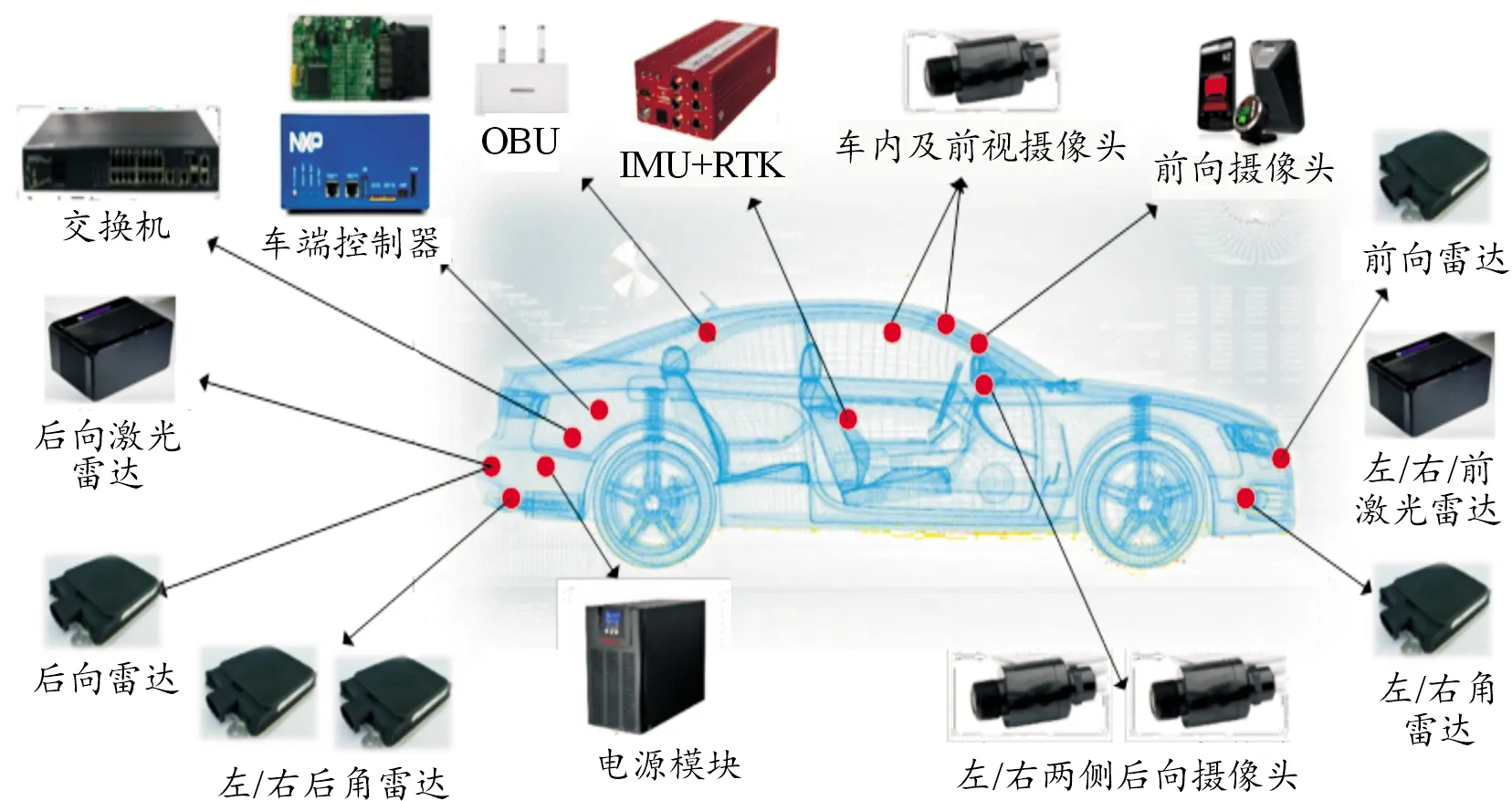
图4 自动驾驶车辆硬件系统
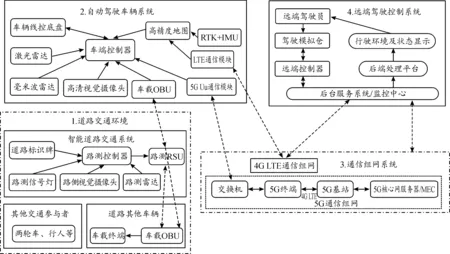
图5 远程自动驾驶系统架构
3 车辆感知及控制系统设计
车辆的感知和控制包含对车辆周围环境的感知识别,对影响车辆行驶关联交通目标物识别及交通参与物行为预测,对车辆行驶路线的规划和决策,对执行器的控制及网联的人机交互功能,自动驾驶控制软件逻辑模块结构如图6所示。
3.1 基于多源数据融技术的感知系统研究
远程自动驾驶系统的环境感知方案采用多激光雷达、多视觉、多毫米波雷达和V2X的感知方案。多激光雷达融合结果和前、后向毫米波雷达、前向视觉识别结果、OBU信息进行目标级数据融合。该环境感知系统输出的结果可以覆盖车辆360°的感知范围,可以识别车辆周围及更远范围的障碍物、车道线、交通标志等信息。传感器数据融合算法框架如图7所示。
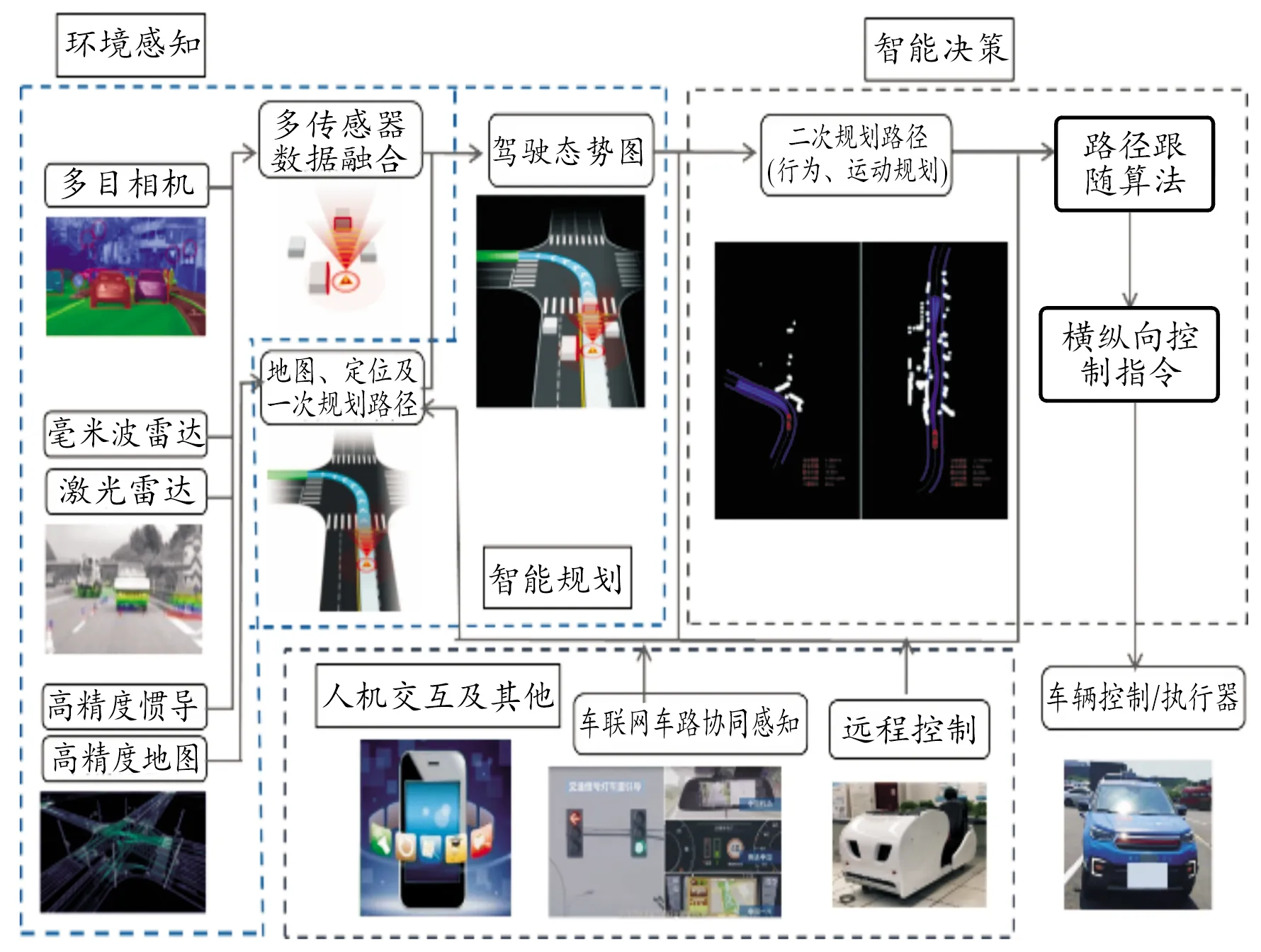
图6 自动驾驶控制软件模块框图

图7 感知数据融合算法框架
在多源数据融合感知方面,尤其以激光雷达点云数据的处理和算法最为复杂,为满足自动驾驶车辆对环境充分感知的需求,重点研究了多激光雷达的点云数据融合处理算法。为了实现在不影响检测效果的前提下,提高实时性,首先利用 VoxelGrid 滤波器对点云进行降频采样处理,公式如下:
(1)
式中:xi、yi、zi为栅格内的第i个点的坐标值;N为栅格内点的数目;x、y、z为栅格重心的坐标。
进一步对点云数据进行栅格化处理与有效区域栅格过滤,选取激光点云的z坐标值作为过滤与分割的依据,对地面、建筑物等的点云进行滤除。将激光扫描的区域在x-y平面上划分为0.2 m×0.2 m的网格。采用融合密度聚类和区域生长算法将具有相同特征的连通区域分割出来,保证了良好的边缘信息,区域分割效果如图8所示。
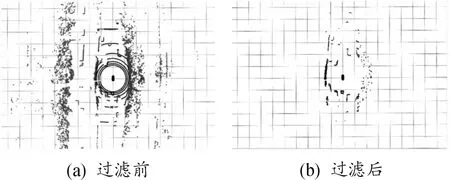
图8 激光点云数据聚类处理效果
3.2 5G远程驾驶控制系统策略研究
5G远程自动驾驶车辆包含一套软硬件控制系统,可实现3种工作模式,即远程遥控驾驶模式、自动驾驶模式、人工远程遥控修正自动驾驶状态模式。车辆软件控制策略如图9所示,自动驾驶模式,可以实现自动路径规划,运动状态感知和车辆自动控制。在远程遥控驾驶模式,可以支持远程驾驶员通过远程驾驶模拟仓和5G网络,实现对车辆的远程遥控驾驶。在自动驾驶模式下,如果远程驾驶员发现车辆的控制轨迹与理想轨迹有偏差,可以通过远程驾驶模拟仓操作方向盘、油门踏板或自动踏板,主动增加调节量,修正纵横向组合控制效果。车辆在自动驾驶模式下,当车辆遇到无法识别的场景、系统出现故障或远程驾驶员希望主动干预时,可以切换到车辆远程驾驶模式,进行远程接管控制。

图9 5G远程自动驾驶车辆控制策略
4 实验结果与分析
为了验证5G远程自动驾驶系统方案的可行性和控制效果,改造了一款自主品牌的车辆底盘线控系统。并在i-VISTA智能网联汽车示范区封闭区域内搭建了5G专用通信网络,开展了相关验证试验。选取5G远程自动驾驶系统的通信时延、主动安全性能、轨迹跟踪性能等关键功能和性能,开展了系统验证试验。远程驾驶室及自动驾驶车辆如图10和图11所示。
4.1 通信时延迟性能测试
为了确保远程驾驶系统的可靠性和系统稳定性,需要5G网络提供低时延的数据传输。因此,对5G网络通信端到端的传输延时进行了测试,测试结果如图12所示。从测试情况来看,最短传输时延时7 ms,最长10 ms,平均时延8 ms,整体来看,平均传输时延在10 ms以下,该5G专用通信网络,可满足自动驾驶车辆控制的要求。

图10 5G远程驾驶控制室

图11 5G远程自动驾驶试验样车
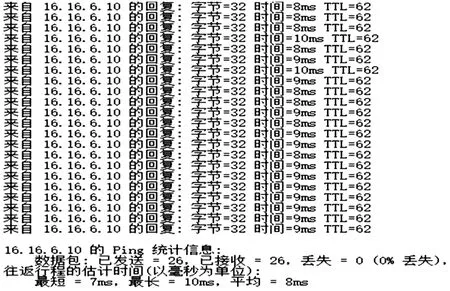
图12 5G网络通信时延测试
4.2 自动驾驶车辆主动安全性能验证
为了验证自动驾驶车辆的主动安全性能,采用了驾驶机器人、RT、EVT目标车和4A目标假人在专业测试场地,设计了多个典型安全性验证场景,关闭自动换道功能,开展了主动安全性能场地验证试验。
4.2.1目标车跟停场景测试
自动驾驶车辆跟随前方目标车辆行驶。目标车速度由30 km/h逐步减速到0,并保持静止10 s以上,然后目标车再加速到60 km/h行驶,测试结果如图13所示。从测试结果来看,被测主车可以跟随目标车加减速行驶,并避免发生碰撞。
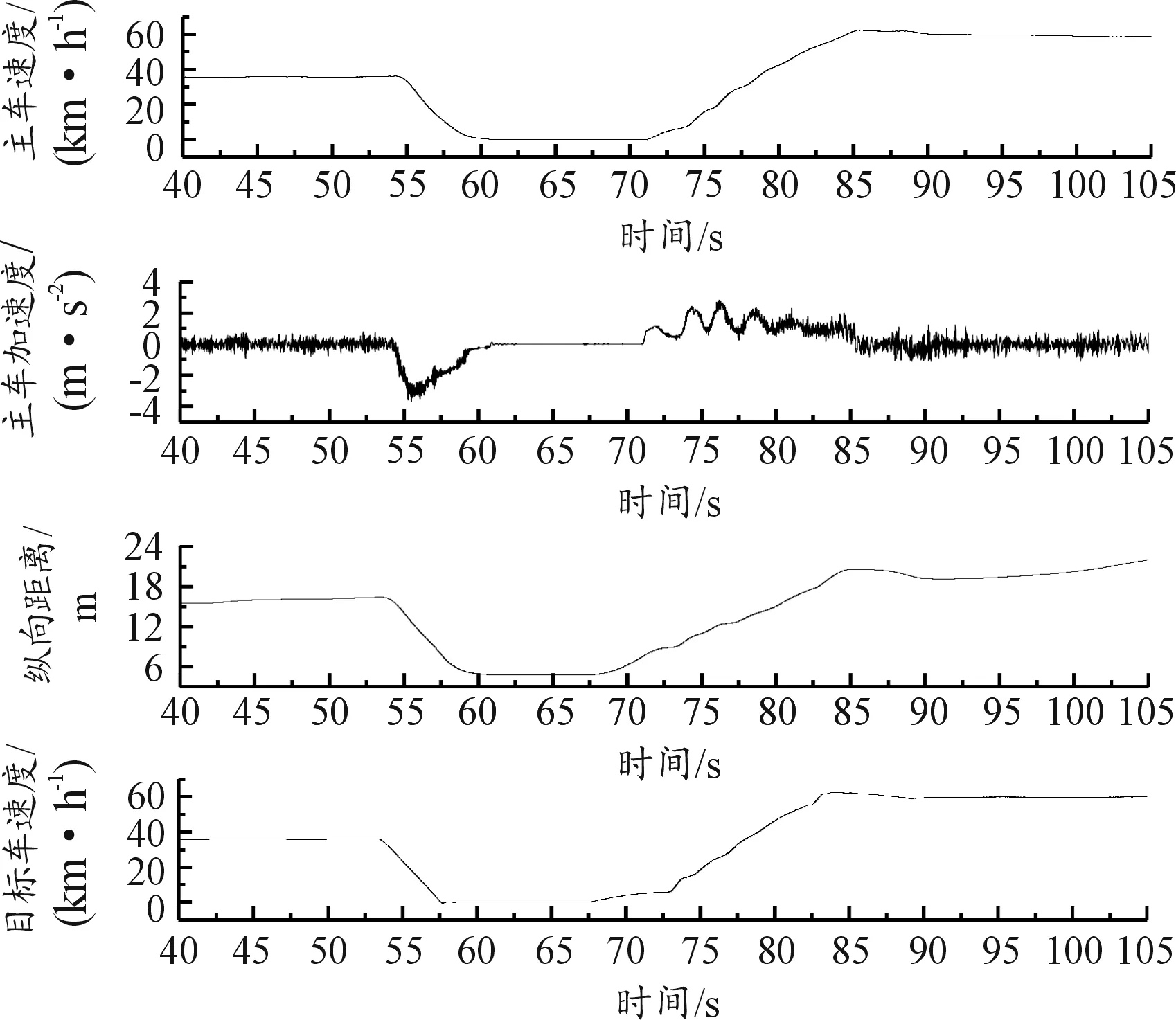
图13 跟随目标车加减速行驶
4.2.2静止目标车避撞场景测试
驾驶机器人控制测试主车,从远处以40 km/h的速度,匀速靠近前方静止的目标车辆,测试结果如图14所示。从测试结果来看,主车可以准确识别到前方静止目标车,在试验开始后的13.5 s时刻,主车开始自动减速,并最终在距离目标车1 m左右的距离自动刹停,避免了碰撞的发生。
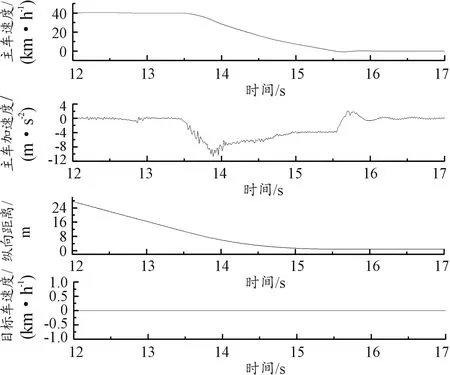
图14 静止目标车避撞测试
4.2.3低速目标车避撞场景测试
驾驶机器人控制目标车在前方以20 km/h速度匀速行驶,测试主车以60 km/h速度从远处逐渐靠近低速行驶的前方目标车辆。如图15所示,试验开始后第12 s,测试主车发现存在碰撞风险,采取紧急刹车动作,两车最近纵向距离达到1 m左右,避免了碰撞发生(测试结果如图16所示)。
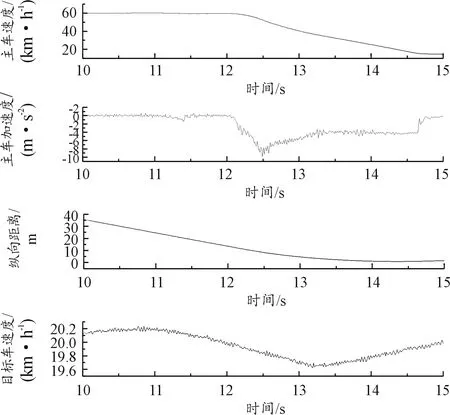
图15 低速目标车避撞测试
4.2.4行人目标横穿避撞场景测试
驾驶机器人控制测试主车以60 km/h的速度匀速行驶,在接近路口时拖拽系统牵引前方目标假人以5 km/h速度横穿主车行驶路径,测试主车发现与横穿行人存在碰撞风险,在25 s时刻采取紧急刹车动作,避免了碰撞发生,测试结果如图16所示。
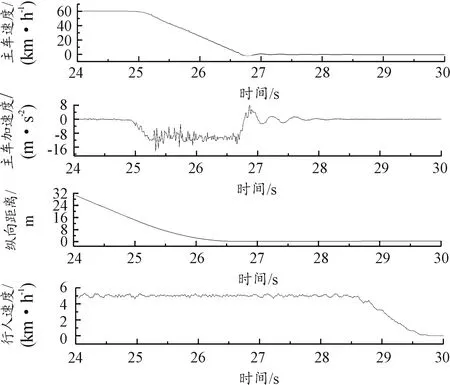
图16 行人横穿场景避撞测试
4.3 自动驾驶车辆目标轨迹跟踪行驶
基于i-VISTA自动驾驶示范园区环境,设计了自动驾驶车辆的运行目标轨迹,如图17所示。基于该轨迹测试5G远程自动驾驶车辆的轨迹跟踪性能和与远程遥控驾驶控制性能。
在自动驾驶模式下车辆沿设定轨迹行驶,方向实际角度与计算出的轨迹目标角度关系如图18所示。在160、250 s处,分别触发人工远程接管控制需求,远程遥控驾驶员通过5G网络遥控驾驶车辆,分别远程驾驶10 s和20 s,然后切入自动驾驶模式,继续执行自动驾驶控制。从整体表现来看,自动驾驶系统可以实现快速切换和准确响应。自动驾驶模式下,方向盘的实际转角和转向请求角度如图19所示,可以实现快速、准确的转角跟踪响应。
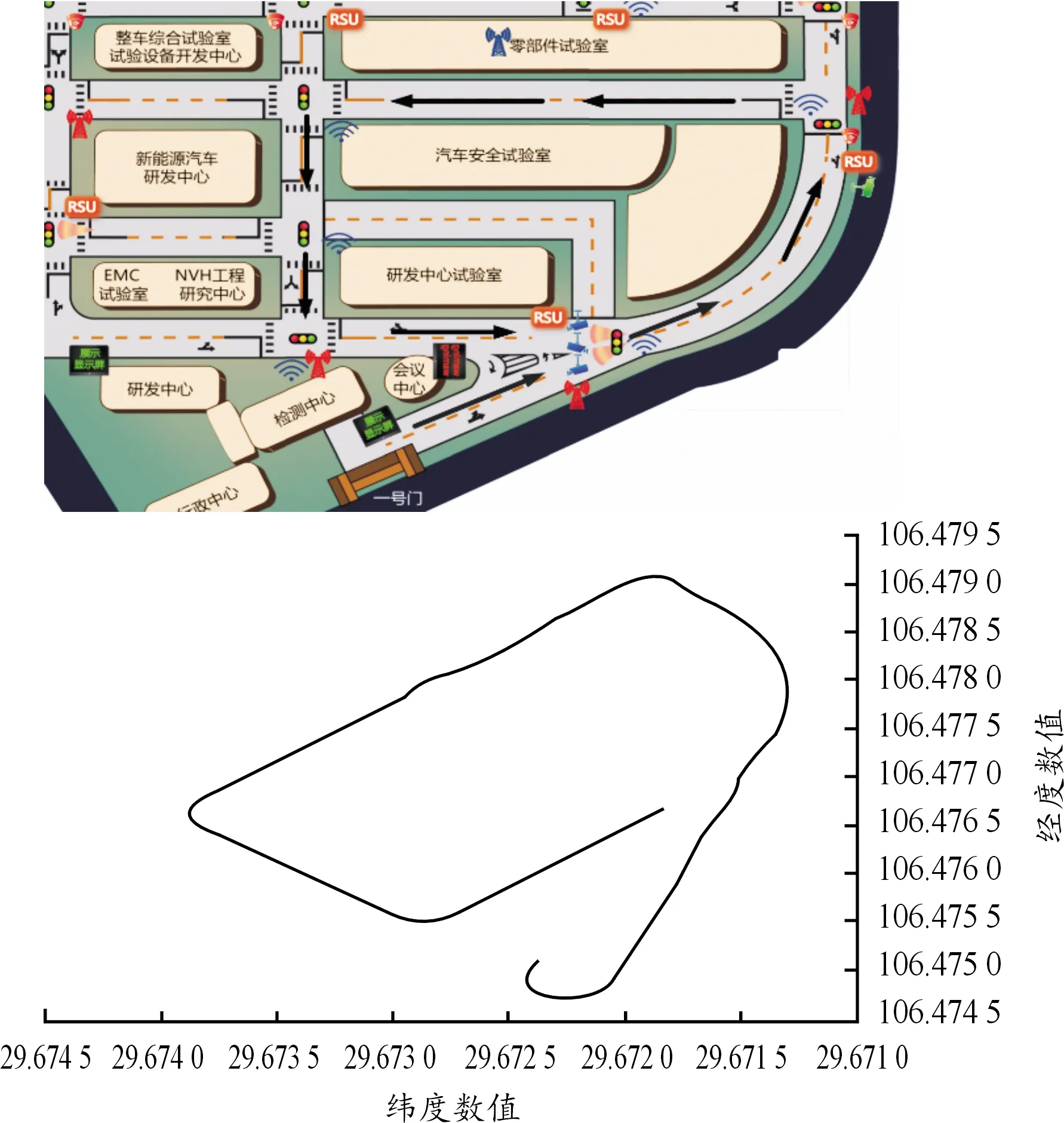
图17 自动驾驶车辆在i-VISTA测试区行驶轨迹
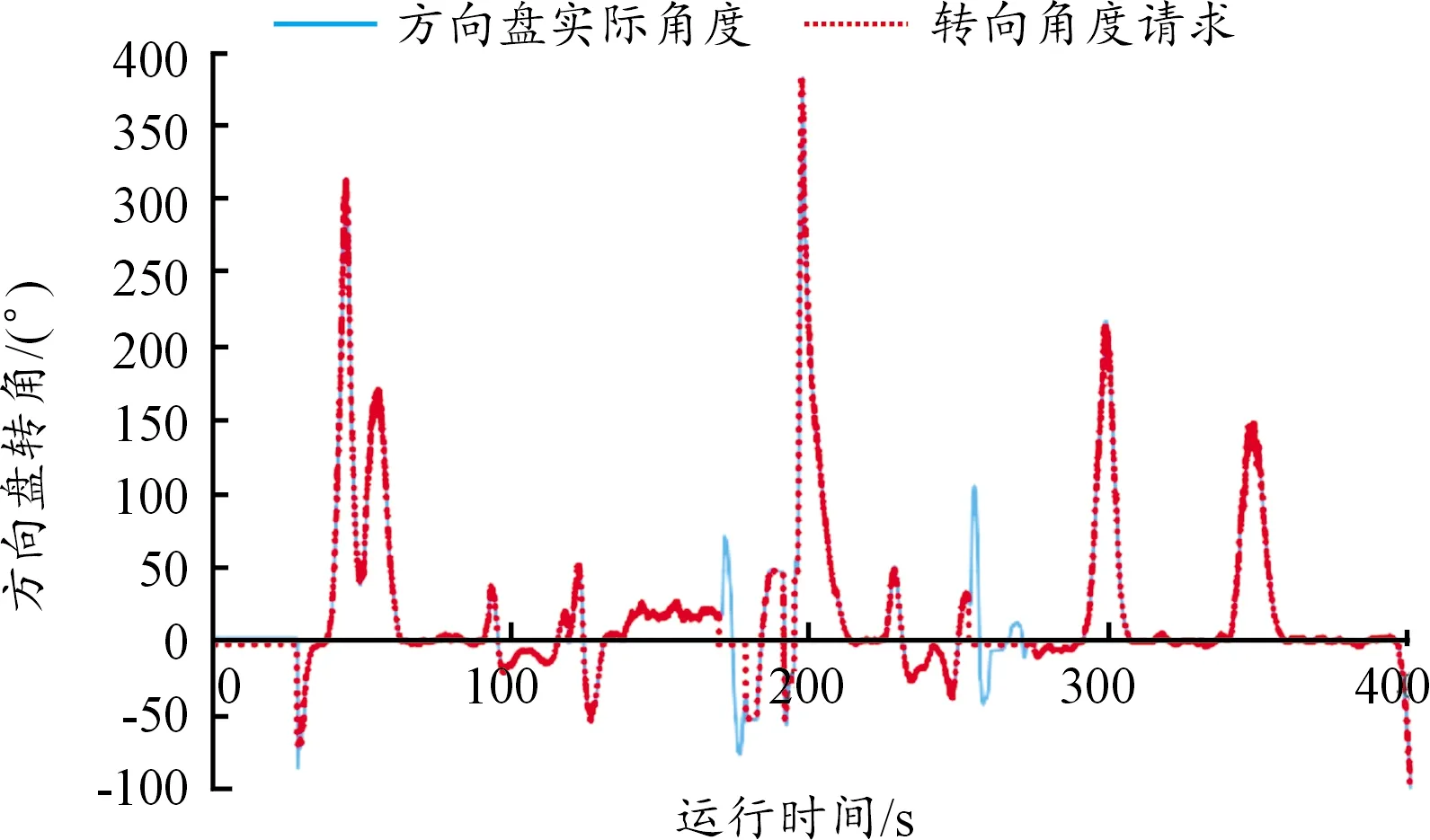
图18 转向角度请求与方向盘实际角度
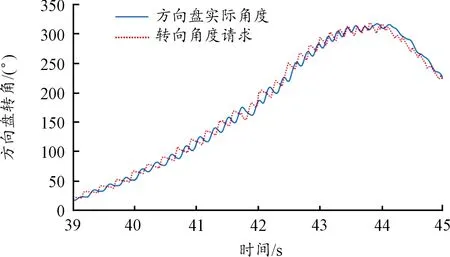
图19 方向盘转向跟踪效果
5 结论
针对自动驾驶车辆控制系统架构问题,结合CPSS相关理论方法、5G通信技术、自动驾驶车辆感知和控制技术,提出了面向5G远程自动驾驶的CPSS车辆控制系统解决方案。并基于一款车辆的线控底盘,进行了自动驾驶车辆改造,配置了自动驾驶车辆感知和控制系统,开发了感知、决策、控制等算法。采用专业化测试场地和设备,开展了实车验证试验,验证了5G网络通信时延、车辆主动安全性能和自动驾驶车辆目标轨迹跟踪性能。结果表明:本文提出的基于CPSS理论方法的5G远程自动驾驶控制系统具备较好的技术可行性,可以满足自动驾驶控制系统的设计需求。
