多机电力系统固定时间动态面高阶滑模控制
2022-03-21燕1汪从孝3祝国强
李 燕1,吉 爽,汪从孝3,祝国强
(1.重庆电力高等专科学校,重庆400053;2.东北电力大学 自动化工程学院,吉林 吉林 132012;3.重庆中商全联售电集团有限公司,重庆400051)
电力系统是一个高度非线性、强耦合性的复杂动态系统,而电力问题大部分是由电力系统运行不稳定而引起的。为了防止其造成不可估量的经济损失,发电机励磁控制和静止无功补偿器(SVC)控制受到广泛关注[1-2]。
近年来,SVC与励磁的协同控制已成为研究的热点。由于滑模变结构控制具有鲁棒性强、结构简单、适应性强等特点[3-5],所以其被广泛应用于电力系统稳定及电机控制等领域。文献[6]中为了使系统状态在有限时间内收敛,采用终端滑模控制方法,设计了以功角稳定和电压控制为目标的协调励磁控制器。除终端滑模外,高阶滑模也是实现有限时间控制的有效方法[7-9]。文献[10]针对多机励磁系统,提出连续高阶滑模控制方案,利用等效控制理论构造超扭曲算法的自适应增益,保证了闭环电力系统的有限时间稳定性。积分滑模是高阶滑模的一种特殊情况[11-12]。文献[13]将自适应模糊控制和积分滑模控制相结合,引入扰动观测器,确保了含不确定扰动的同步发电机混沌振荡控制系统具有较强的鲁棒性。动态面控制方法通过引入一阶低通滤波器克服了传统反步法中的“微分爆炸”问题[14-15]。文献[16]针对一类带有SVC和未知线路传输时延的大型多机电力系统,提出了一种结构简单的分散式动态面量化控制方案。文献[17]设计了一种抗干扰动态面控制方案,有效地解决了未知的非对称死区非线性问题。
终端滑模和积分滑模控制的有限时间收敛始终依赖于系统的初始状态,初值越大,收敛时间越长。因此,在此基础上,提出了固定时间稳定性[18-20]的概念。文献[21]中将一可调指数的非线性项加入终端吸引子前,设计了非奇异固定时间滑模控制器。文献[22]通过设计基于电流源变换器的静止同步补偿器,提出了一种基于三母线电力系统混沌抑制和电压稳定的固定时间动态面高阶滑模控制方法。固定时间控制不仅保留了有限时间控制的优点,而且收敛时间独立于系统的初始状态。
受以上研究工作启发,设计了一种新型的固定时间动态面高阶滑模控制器,以解决SVC与发电机励磁的协调控制问题。所提出的控制方案将动态面控制与高阶滑模控制相结合,引入固定时间稳定控制,得到了独立于初始条件的收敛时间上界。使用模糊逻辑系统,设计模糊逻辑逼近器逼近系统模型中的未知非线性连续函数,同时采用范数估计方法,在线估计模糊逼近器的权重向量的范数,从而减小了待估计参数的数量,解决了精度与计算量之间的矛盾。通过MATLAB仿真软件完成仿真实验,实验结果表明了控制方案的有效性。
1 系统动态模型与问题陈述
1.1 数学模型
根据文献[23-25],对于发电机励磁系统,采用三阶实用模型,忽略定子绕组暂态和阻尼绕组的影响,仅考虑励磁暂态和转子动态,则带有SVC的多机电力系统的状态方程为
(1)
这里,γi(δ,ω)为耦合项,并满足
(2)
并且

定义以下状态变量以进行坐标转换:
(3)
式中:δi0为发电机功角的初始值;Vmi为SVC的接入点电压;Vref,i为SVC的参考电压,并且有
其中


根据式(1)和式(3),可以得到带有SVC的多机励磁系统模型为
(4)
(5)
式中:yi1和yi2分别为发电机励磁的输出和SVC的输出,并且

1.2 模糊逻辑系统(FLSs)
本文中,采用模糊逻辑系统逼近连续的未知函数。一个模糊逻辑系统主要由模糊产生器、模糊规则库、模糊推理机和反模糊化器四部分组成。模糊规则由以下形式的模糊“IF-THEN”规则集合构成:

(6)

通过单值模糊、中心去模糊和乘积推理,模糊逻辑系统可以表示为
Y(x)=WTε(ξ)
(7)
式中:W∈RN为可调权值向量;ε(ξ)∈RN为模糊基函数向量;定义模糊基函数为
(8)
一般选用高斯基函数作为模糊隶属度函数,表达形式为
(9)

模糊逻辑系统可以在紧集内以较小误差有效地逼近任意连续的非线性函数,可表示为
(10)
式中:非线性连续函数F(ξ):Ω→R,Ω∈Rn是一个紧集,WTε(ξ)是一个模糊逻辑系统,σ>0为逼近误差。因此,F(ξ)可以表示为
F(ξ)=W*Tε(ξ)+σ*,∀ξ∈Ω⊂Rn
(11)
式中:最小逼近误差|σ*|≤σ,W*为理想权值向量,可表示为
(12)
2 控制器的设计过程
控制器的设计过程分为两部分:多机励磁系统的控制律设计和SVC的控制律设计。具体的设计步骤如下所示。
步骤1:为了实现状态变量xi1的固定时间稳定,xi1可表示为
(13)
定义第一个误差面ei1为
ei1=xi1-xi1d
(14)
ei1的时间导数为
(15)
定义李雅普诺夫函数:
(16)
Vi1的时间导数为
(17)
(18)
式中:xi1d为参考信号;m、n为正奇整数,m>n且(m+n)/2是正奇整数。


(19)
式中:τi2为一阶低通滤波器的时间常数。
步骤2:定义第二个误差ei2为
ei2=xi2-xi2d
(20)
ei2的时间导数为
(21)
定义李雅普诺夫函数:
(22)


(23)
使用模糊逻辑逼近器逼近未知项,有
(24)

(25)
式中:σi2m为逼近误差的上界,φi2为正的设计参数。将式(24)和式(25)带入式(23)中,则式(23)可写为
(26)
(27)
(28)

(29)
式中:λi2为正的设计参数;τi3为一阶低通滤波器的时间常数。
步骤3:定义第三个误差面ei3
ei3=xi3-xi3d
(30)
ei3的时间导数为
(31)
定义李雅普诺夫函数:
(32)

(33)
使用模糊逻辑逼近器逼近未知项,有
(34)

(35)
式中:σi3m为逼近误差的上界,φi3为正的设计参数。将式(34)和式(35)带入式(33)中,则式(33)可写为
(36)

(37)
(38)
式中:λi2为正的设计参数。
步骤4:定义第4个误差面ei4为
ei4=xi4-Vref,i
(39)
ei4的时间导数为
(40)
定义李雅普诺夫函数:
(41)

(42)
使用模糊逻辑逼近器逼近未知项,有
(43)

(44)
式中:σi4m为逼近误差的上界,φi3为正的设计参数。将式(43)和式(44)带入式(42)中,则式(42)可写为
(45)
(46)
(47)
式中:λi4为正的设计参数。gij是未知有界参数,存在常数gmax>gmin>0,使得gmax>gij>gmin>0。

3 稳定性分析
定义滤波误差yi2e和yi3e为
(48)
(49)
根据式(19)和式(29),有

(50)
(51)
考虑以下李雅普诺夫函数
(52)
将式(18)带入式(17)中,式(27)和式(28)带入式(26)中,式(37)和式(38)带入式(36)中,式(46)和式(47)带入式(45)中,可以得到

(53)
(54)
(55)
(56)
同时,根据式(48)至式(51)可得:

(57)
(58)
对于任何正实数a、b、c和正实数p、q满足1/p+1/q=1,则有不等式(59)成立:
(59)
则有
(60)
(61)
(62)
(63)
因为
所以有
(64)
类似的
(65)
(66)
定义紧集Υ1和Υ2为
(67)
(68)

(69)
(70)

(71)
选择适当参数:

定义
可得:

(72)

可以获得闭环系统的最终界限为
(73)
通过适当的选择控制参数,系统误差将在固定时间内收敛到原点的任意小邻域,收敛时间受一个常数T限制。
(74)
4 仿真分析
为了验证本文提出的控制算法的有效性,对图1所示的带有SVC的双机电力系统进行了动态仿真。

图1 带有SVC的双机电力系统结构图
仿真参数选择如下:α11=α21=8,β11=β21=2,α12=α22=10,β12=β22=2,α13=α23=100,β13=β23=8,α14=α24=10,β14=β24=5,φ12=12,φ22=12,φ13=φ23=3,φ14=φ24=3,τ12=τ22=0.005,τ13=τ23=0.005,λ12=λ22=0.3,λ13=λ23=0.3,λ14=λ24=0.5,r12=r22=2,r13=r23=2,r14=r24=1,n=23,m=19。此外,外部扰动di1=cos(2t),di2=0.001sin(t)cos(2t)。
考虑t=5 s传输线突发三相短路故障,并持续0.4 s后消失的情况。该情况下采取的操作点为
δ10=30.5°,ω10=314.20 rad/s,
Pm10=1.06 p.u,Vref,1=1.15 p.u.
δ20=30.8°,ω20=314.16 rad/s,
Pm20=1.02 p.u,Vref,2=1.05 p.u.


图2 两机的功角跟踪误差对比图

图3 两机的功角响应曲线

图4 两机的角速度响应曲线
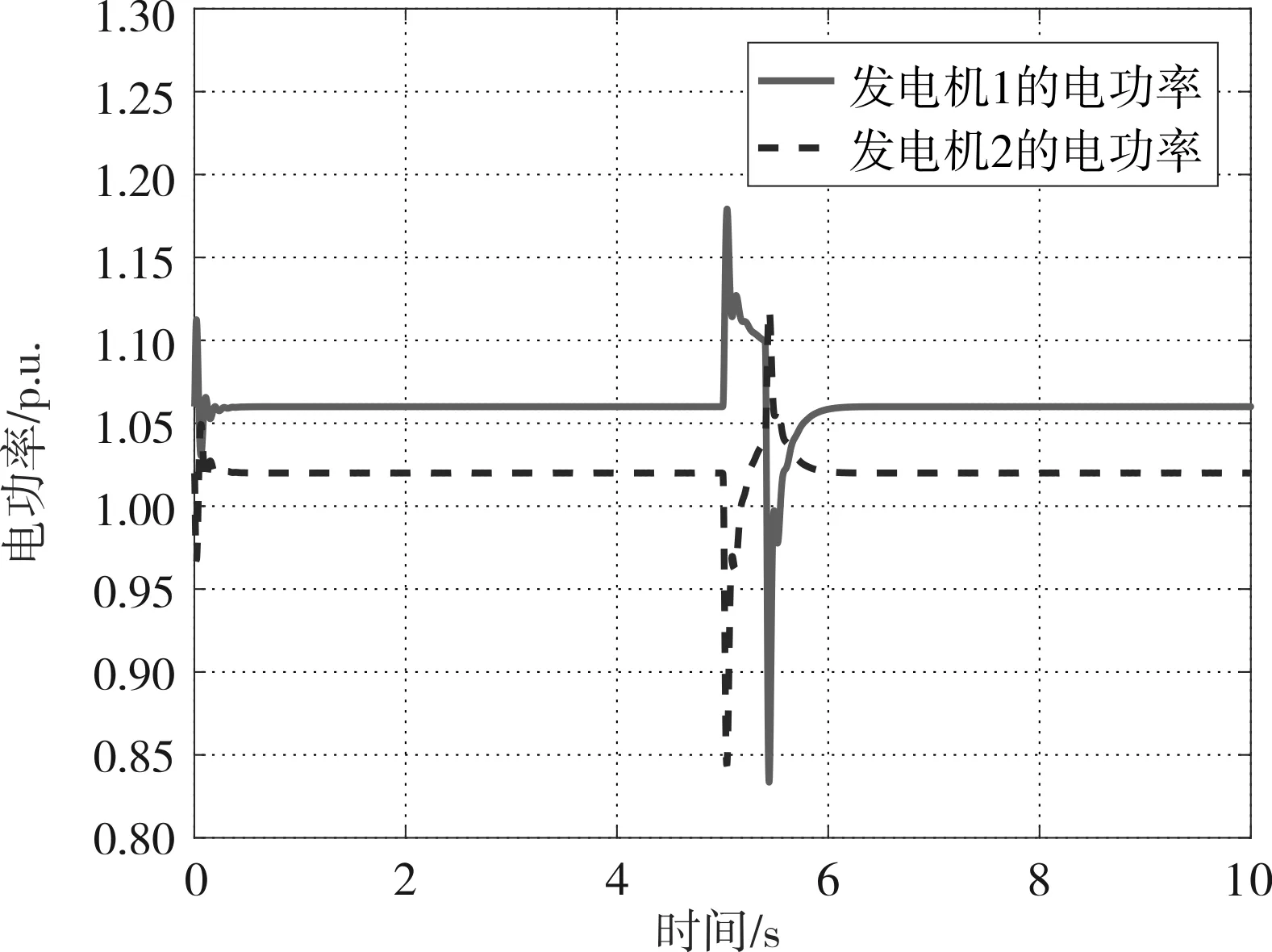
图5 两机的电功率响应曲线

图6 两机的控制输入
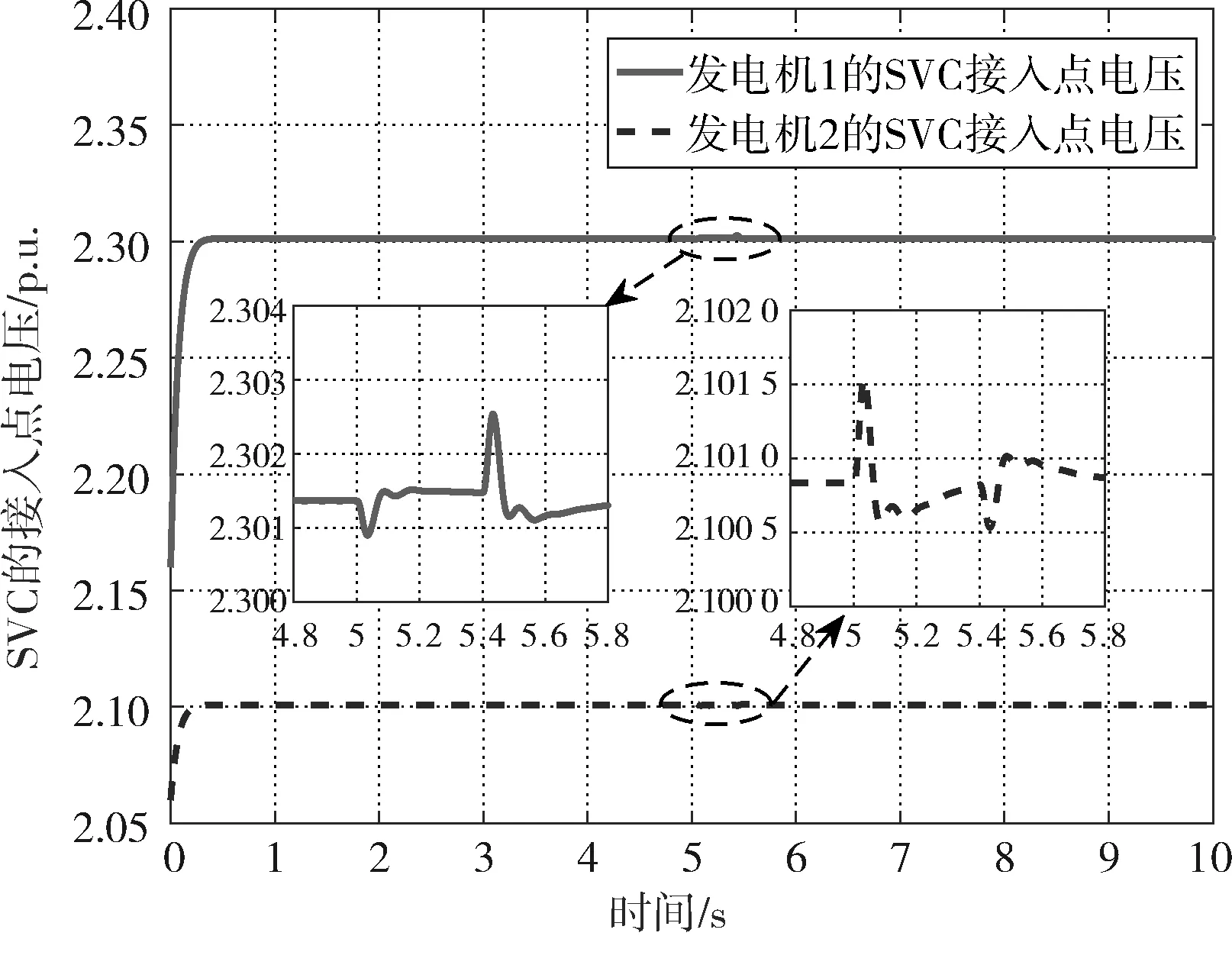
图7 两机的SVC接入点电压响应曲线

图8 两机的SVC实际控制律
5 结论
针对带有SVC的多机励磁系统,提出了固定时间动态面高阶滑模控制方法以提高系统的稳定性。应用反步思想设计高阶滑模控制器,并采用动态面控制技术克服了反步法设计过程中的“微分爆炸”问题,引入固定时间稳定概念,实现了系统半全局固定时间一致最终有界。在三相短路故障下进行了仿真试验。基于MATLAB的仿真结果表明本文设计的SVC与发电机励磁协调控制器具有良好的暂态性能。